Theoretical Analysis on the Short-Circuit Current of Inverter-Interfaced Renewable Energy Generators with Fault-Ride-Through Capability

Abstract
:1. Introduction
2. Main Circuit Model and the FRT Control Strategy of Inverter-Interfaced Generators
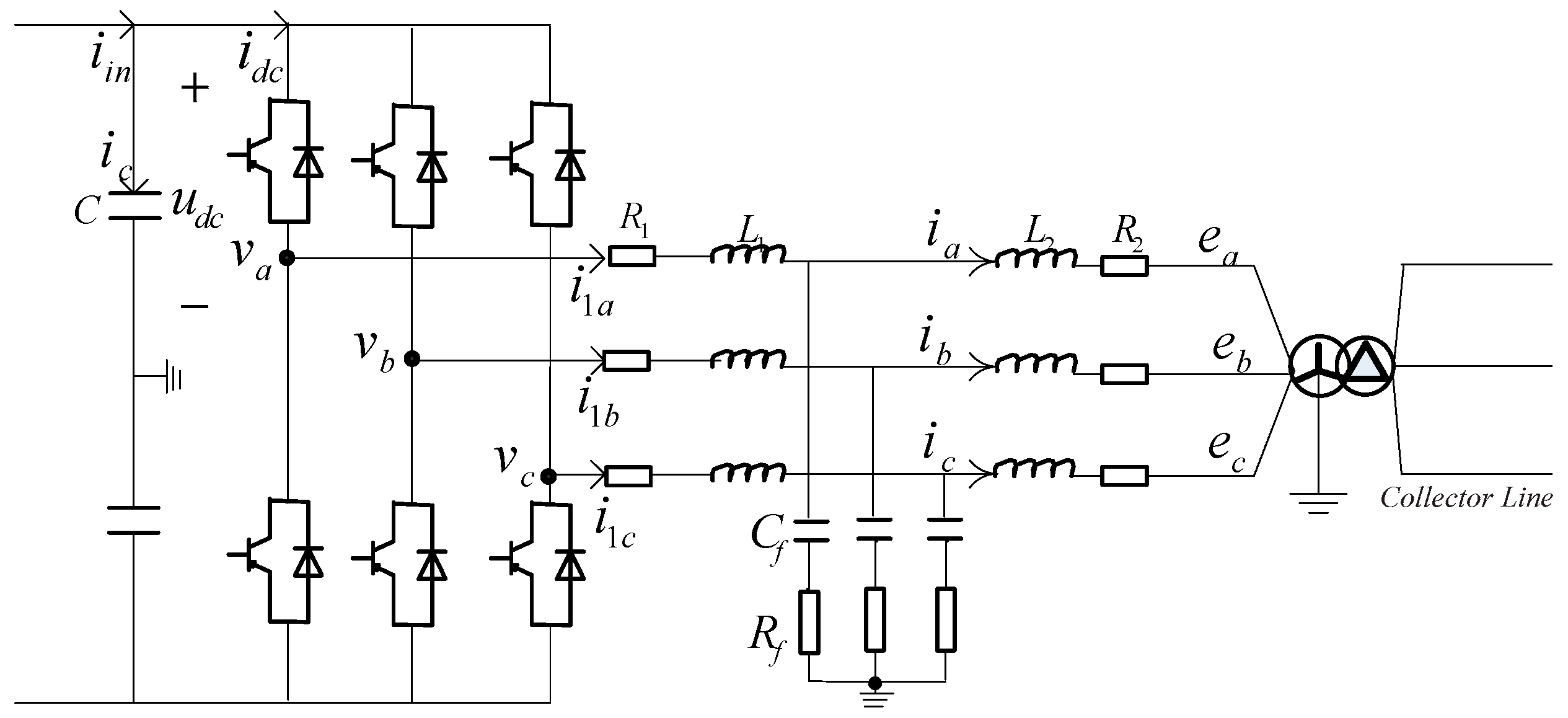
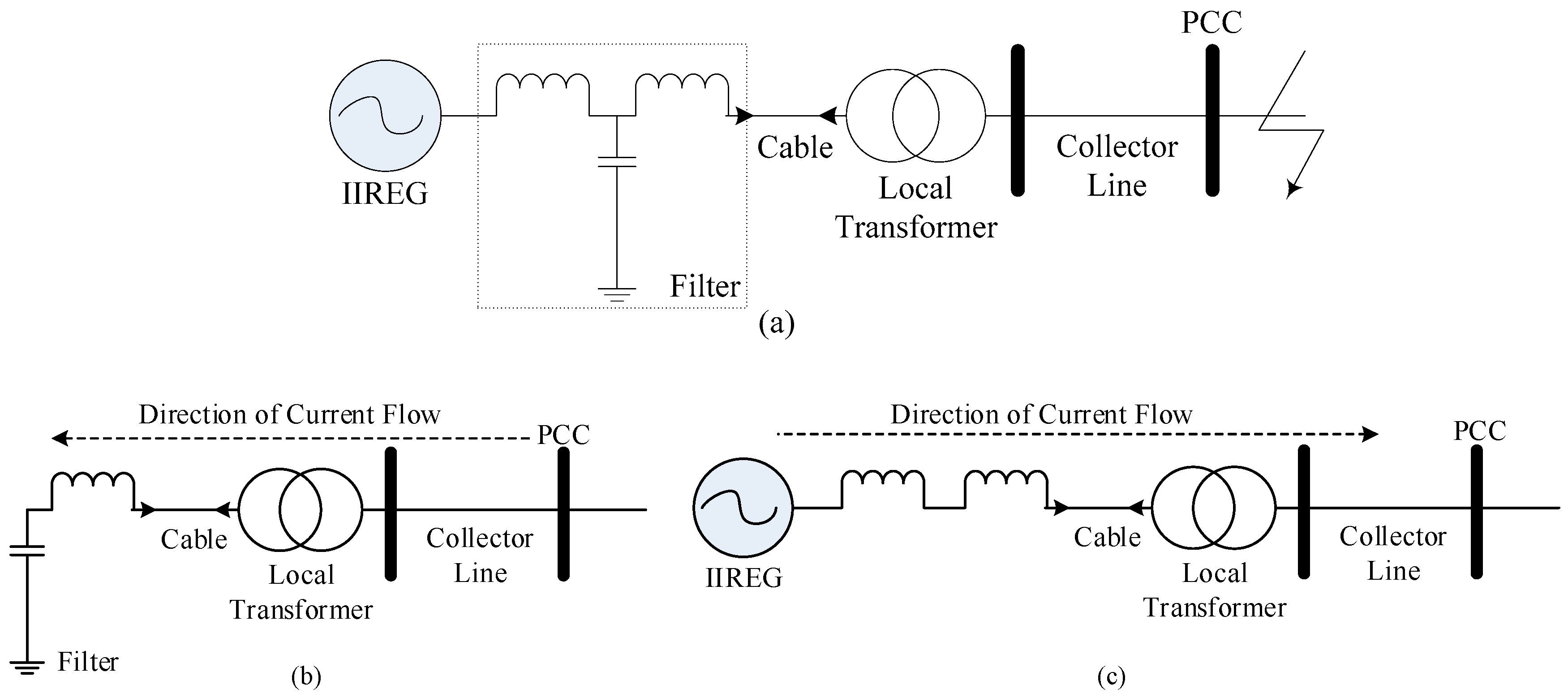
2.1. Main Circuit Model
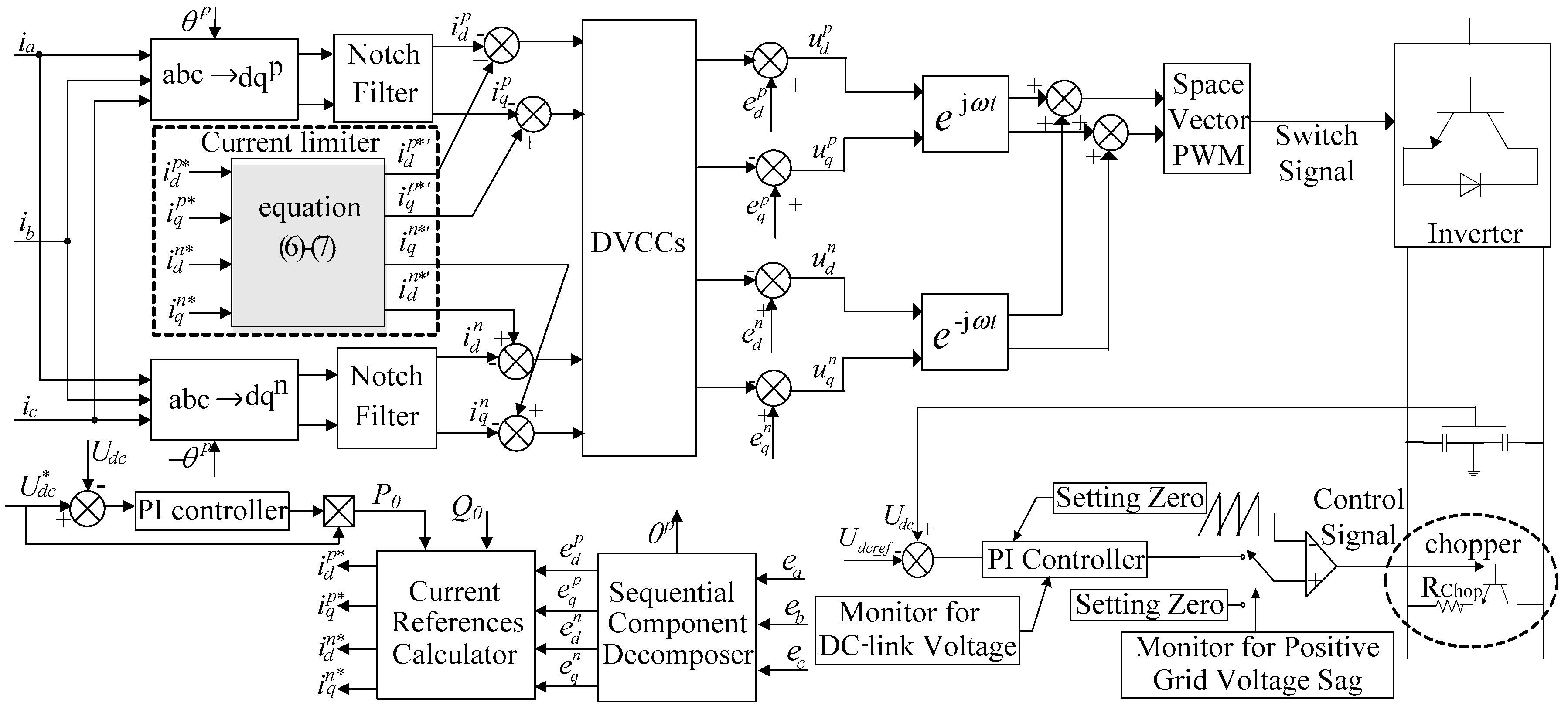
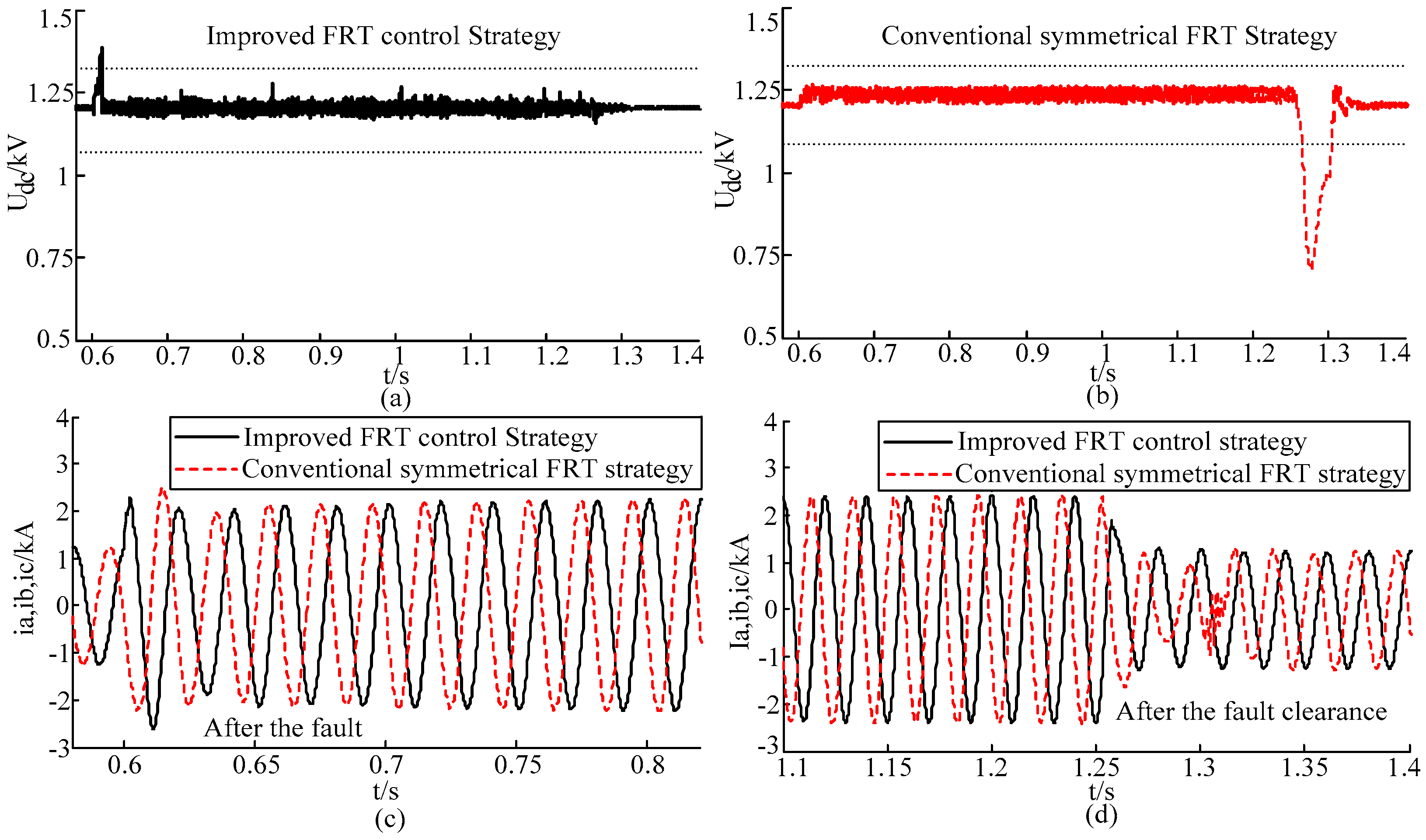
2.2. Improved FRT Control Strategy
3. Theoretical Analysis for IIREGs’ Fault Current Characteristics
4. Mathematical Expression of Fundamental Fault Current
4.1. Derivationfor Fundamental Fault Current
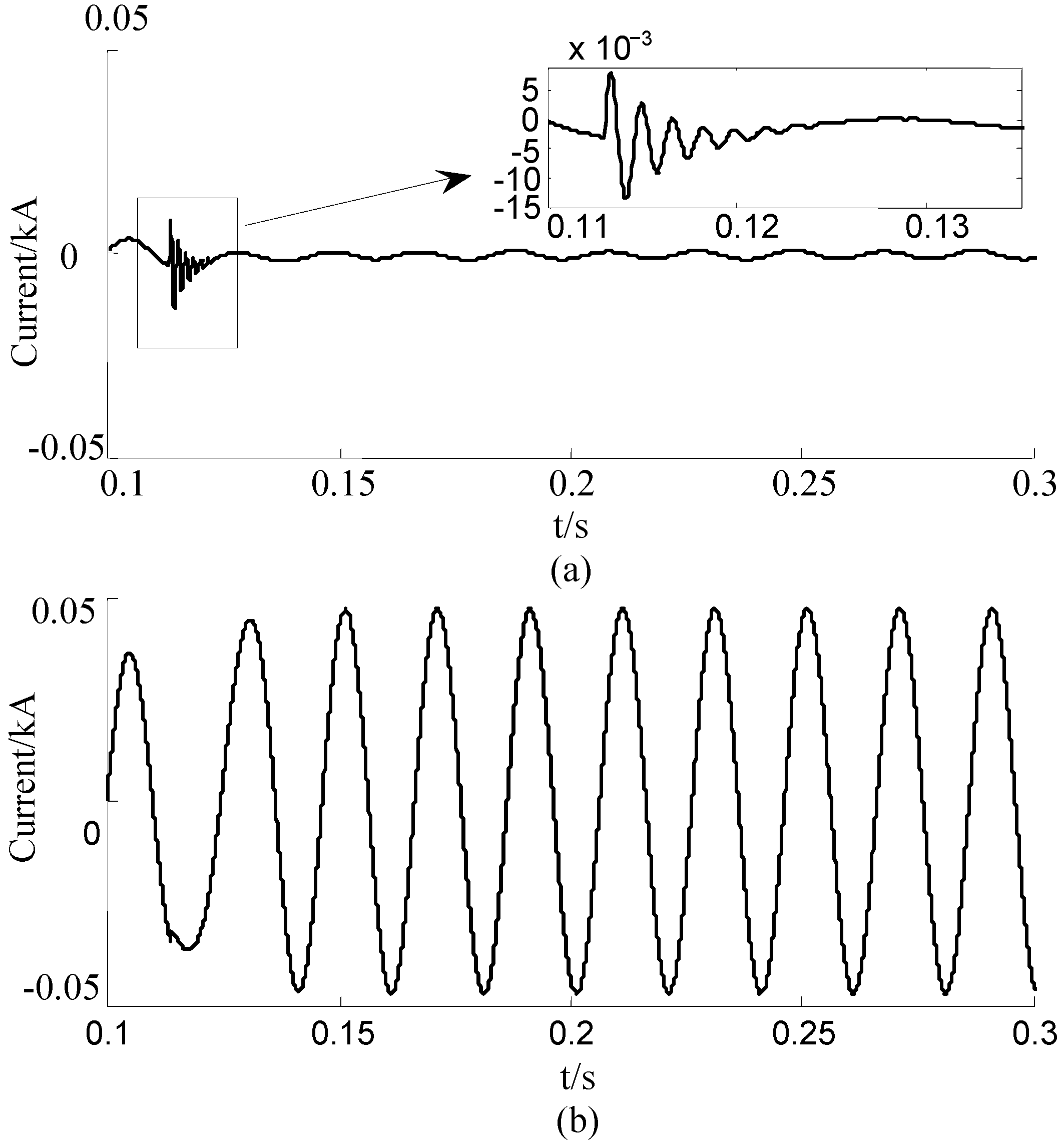
4.2. Verification
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| Subscript d | d-axis component |
| Subscript q | q-axis component |
| Superscript p | Positive sequence component |
| Superscript n | Negative sequence component |
| Superscript * | Reference value |
| Superscript o | Average component |
| Superscript c | Second harmonic cosine component |
| Superscript s | Second harmonic sine component |
| E | Grid-side voltage Vector |
| I | Output current Vector |
| e | Instantaneous grid-side voltage |
| i | Instantaneous output current |
| Em | Grid-side voltage amplitude |
| γ | Voltage drop coefficient |
| β | Voltage imbalance degree |
| Im | Output current amplitude |
| U | AC-side voltage Vector |
| Udc | DC-link voltage |
| Pout | Active output power of the IIREG |
| Qout | Reactive output power of the IIREG |
| Active power at the inverter pole | |
| Reactive power at the inverter pole | |
| Pin | DC-link input power |
| P0 | Average reactive power Reference |
| Q0 | Average reactive power Reference |
| S0 | Apparent output power |
| Imax | Instantaneous maximum current through inverter |
| Ilim | Inverter’s current constraint |
| α | Scalar coefficient of the current limiter |
| Positive-sequence current angle | |
| Negative-sequence current angle | |
| θi | Angle difference between and |
| R1 | Inverter-side resistance of the LCL filter |
| R2 | Grid-side resistance of the LCL filter |
| ω | Grid frequency |
| C | DC-link capacitance |
Appendix A
References
- Renewables 2013: Global Status Report. Available online: http://www.ren21.net (accessed on 1 June 2013).
- China’s 12th Five-Year Plan. Available online: http://english.gov.cn (accessed on 1 March 2011).
- Bae, M.; Lee, H.; Lee, B. An Approach to Improve the Penetration of Sustainable Energy Using Optimal Transformer Tap Control. Sustainability 2017, 9, 1536. [Google Scholar] [CrossRef]
- Muljadi, E.; Samaan, N.; Gevorgian, V.; Li, J.; Pasupulati, S. Different factors affecting short circuit behavior of a wind power plant. IEEE Trans. Ind. Appl. 2013, 49, 284–292. [Google Scholar] [CrossRef]
- Mohseni, M.; Islam, S.M.; Masoum, M.A.S. Impacts of Symmetrical and Asymmetrical Voltage Sags on DFIG-Based Wind Turbines Considering Phase-Angle Jump, Voltage Recovery, and Sag Parameters. IEEE Trans. Power Electron. 2011, 26, 1587–1598. [Google Scholar] [CrossRef]
- He, S.E.; Suonan, J.L.; Kang, X.N.; Song, G.B. Impacts of Large scale Wind Power Grid Integration on Relay Protection and Countermeasures. Autom. Electr. Power Syst. 2012, 36, 136–142. [Google Scholar]
- Zhuo, G.P.; Hostettler, J.D.; Gu, P.; Wang, X. Robust Sliding Mode Control of Permanent Magnet Synchronous Generator-Based Wind Energy Conversion Systems. Sustainability 2016, 12, 126. [Google Scholar] [CrossRef]
- Tarabsheh, A.; Akmal, M.; Ghazal, M. Series Connected Photovoltaic Cells—Modelling and Analysis. Sustainability 2017, 9, 371. [Google Scholar] [CrossRef]
- The Standardization Administration of the People’s Republic of China. Technical Rule for Connecting Wind Farm to Power System (GB/T 19963-2011). 2011. Available online: https://wenku.baidu.com (accessed on 1 June 2012).
- Grid Code High and Extra High Voltage. Available online: http://www.eon-netz.com(accessed on 1 April 2016).
- Benyoucef, A.; Kamel, K.; Chouder, A.; Silvestre, S. Prediction-based Deadbeat Control for Grid-connected Inverter with L-filter and LCL-filter. Electr. Power Compon. Syst. 2014, 42, 1266–1277. [Google Scholar] [CrossRef]
- Townsend, C.; Mirzaeva, G.; Goodwin, G. Deadtime Compensation for Model Predictive Control of Power Inverters. IEEE Trans. Power Electron. 2017, 32, 7325–7337. [Google Scholar] [CrossRef]
- Saponara, S.; Fanucci, L.; Bernardo, F.; Falciani, A. Predictive Diagnosis of High-Power Transformer Faults by Networking Vibration Measuring Nodes with Integrated Signal Processing. IEEE Trans. Instrum. Meas. 2016, 65, 1749–1760. [Google Scholar] [CrossRef]
- Necmi, A.; Ibrahim, S. SPACE based adaptive neurofuzzy controller of grid interactive inverter. Energy Convers. Manag. 2012, 56, 130–139. [Google Scholar]
- Hansen, A.D.; Michalke, G. Multi-pole permanent magnet synchronous generator wind turbines’ grid support capability in uninterrupted operation during grid faults. IET Renew. Power Gener. 2009, 3, 333–348. [Google Scholar] [CrossRef]
- Rioual, P.; Pouliquen, H.; Louis, J.P. Regulation of a PWM rectifier in the unbalanced network state using a generalized model. IEEE Trans. Power Electron. 1996, 11, 495–502. [Google Scholar] [CrossRef]
- Hong-Seok, S.; Kwanghee, N. Dual current control scheme for PWM converter under unbalanced input voltage conditions. IEEE Trans. Ind. Electron. 1999, 46, 953–959. [Google Scholar] [CrossRef]
- Lee, C.T.; Hsu, C.W.; Cheng, P.T. A low-voltage ride-through technique for grid-connected converters of distributed energy resources. IEEE Trans. Ind. Appl. 2011, 47, 1821–1832. [Google Scholar] [CrossRef]
- Hu, J.B.; He, Y.K. Modeling and control of grid-connected voltage-sourced converters under generalized unbalanced operation conditions. IEEE Trans. Energy Convers. 2008, 23, 903–913. [Google Scholar]
- Saponara, S.; Pasetti, G.; Tinfena, F.; Fanucci, L.; D’Abramo, P. HV-CMOS design and characterization of a smart rotor coil driver for automotive alternators. IEEE Trans. Ind. Electron. 2013, 60, 2309–2317. [Google Scholar] [CrossRef]
- Baran, M.E.; E1-Markaby, I. Fault analysis on distribution feeders with distributed generator. IEEE Trans. Power Syst. 2005, 20, 1757–1764. [Google Scholar] [CrossRef]
- Nimpitiwan, N.; Heydt, G.T.; Ayyanar, R.; Suryanarayanan, S. Fault current contribution from synchronous machine and inverter based distributed generators. IEEE Trans. Power Deliv. 2007, 22, 634–641. [Google Scholar] [CrossRef]
- Plet, C.A.; Graovac, M.; Green, T.C.; Iravani, R. Fault response of grid-connected inverter dominated networks. In Proceedings of the 2010 IEEE Power Engineering Society General Meeting, Minneapolis, MN, USA, 25–29 July 2010; pp. 1–8. [Google Scholar]
- Muljadi, E.; Samaan, N.; Gevorgian, V.; Li, J.; Pasupulati, S. Short circuit current contribution for different wind turbine generator types. In Proceedings of the 2010 IEEE Power Engineering Society General Meeting, Minneapolis, MN, USA, 25–29 July 2010; pp. 1–8. [Google Scholar]
- Darwish, A.; Abdel-Khalik, A.S.; Elserougi, A.; Ahmed, S.; Massoud, A. Fault current contribution scenarios for grid-connected voltage source inverter-based distributed generation with an LCL filter. Electr. Power Syst. Res. 2013, 104, 93–103. [Google Scholar] [CrossRef]
- Fischer, M.; Mendonca, A. Representation Of variable speed full conversion wind energy converters for steady state short-circuit calculations. In Proceedings of the 2011 IEEE Power Engineering Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–6. [Google Scholar]
- Hooshyar, H.; Baran, M.E. Fault analysis on distribution feeders with high penetration of PV systems. IEEE Trans. Power Syst. 2013, 28, 2890–2896. [Google Scholar] [CrossRef]
- Castilla, M.; Miret, J.; Sosa, J.; Matas, J.; de Vicuna, L.G. Grid fault control scheme for three-phase photovoltaic inverters with adjustable power quality characteristics. IEEE Trans. Power Electron. 2010, 25, 2930–2940. [Google Scholar] [CrossRef]
- Miret, J.; Castilla, M.; Camacho, A.; Garcia de Vicuna, L.; Matas, J. Control scheme for photovoltaic three-phase inverters to minimize peak currents during unbalanced grid-voltage sags. IEEE Trans. Power Electron. 2012, 27, 4262–4271. [Google Scholar] [CrossRef]
- Jia, K.; Gu, C.J.; Xuan, Z.W.; Li, L.; Lin, Y.Q. Fault characteristics analysis and line protection design within a large-scale photovoltaic power plant. IEEE Trans. Smart Grid 2017. [Google Scholar] [CrossRef]
- Wang, Q.G.; Zhou, N.C.; Ye, L. Fault analysis for distribution networks with current-controlled three-phase inverter-interfaced distributed generators. IEEE Trans. Power Deliv. 2015, 30, 1532–1542. [Google Scholar] [CrossRef]
- Yongsug, S.; Lipo, T.A. Modeling and analysis of instantaneous active and reactive power for PWM AC/DC converter under generalized unbalanced network. IEEE Trans. Power Deliv. 2006, 21, 1530–1540. [Google Scholar]
- Hussein, D.N.; Matar, M.; Iravani, R. Wideband Equivalent Model of Type-3 Wind Power Plants for EMT Studies. IEEE Trans. Power Deliv. 2016, 31, 2322–2331. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Residues | Poles | Time-Domain Performance Indicators | |||
|---|---|---|---|---|---|
| Real Part | Imaginary Part | Real Part | Imaginary Part | Decay Time/ms | Oscillating Frequency/Hz |
| 53.7 | 2.66 | −157.58 | ±31,628.98 | 19.04 | 5033.91 |
| 1.68 | 0.074 | −108.59 | ±2054.53 | 27.63 | 326.99 |
| 240 | 143 | −18,968.83 | ±120,144.69 | 0.16 | 19,121.62 |
| 184 | 0 | −1,931,778.48 | 0.00 | 0.00 | 0.00 |
| −450 | 0 | −5,804,483.19 | 0.00 | 0.00 | 0.00 |
| Po = 1 p.u. Qo = 1 p.u. | Po = 1 p.u. Qo = 0.1 p.u. | Po = 0 p.u. Qo = 1 p.u. | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Current Amplitude | Iam | Ibm | Icm | Iam | Ibm | Icm | Iam | Ibm | Icm |
| Test Results | 1.81 kA | 2.49 kA | 1.25 kA | 2.43 kA | 2.49 kA | 0.31 kA | 1.50 kA | 2.49 kA | 1.55 kA |
| Calculation Results | 1.76 kA | 2.45 kA | 1.19 kA | 2.46 kA | 2.46 kA | 0.33 kA | 1.48 kA | 2.44 kA | 1.60 kA |
| Relative Error | −2.76% | −1.60% | −4.80% | 1.23% | −1.22% | 6.45% | −1.33% | −2.05% | 3.22% |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, S.; Bi, T.; Liu, Y. Theoretical Analysis on the Short-Circuit Current of Inverter-Interfaced Renewable Energy Generators with Fault-Ride-Through Capability. Sustainability 2018, 10, 44. https://doi.org/10.3390/su10010044
Liu S, Bi T, Liu Y. Theoretical Analysis on the Short-Circuit Current of Inverter-Interfaced Renewable Energy Generators with Fault-Ride-Through Capability. Sustainability. 2018; 10(1):44. https://doi.org/10.3390/su10010044
Chicago/Turabian StyleLiu, Sumei, Tianshu Bi, and Yanlin Liu. 2018. "Theoretical Analysis on the Short-Circuit Current of Inverter-Interfaced Renewable Energy Generators with Fault-Ride-Through Capability" Sustainability 10, no. 1: 44. https://doi.org/10.3390/su10010044
APA StyleLiu, S., Bi, T., & Liu, Y. (2018). Theoretical Analysis on the Short-Circuit Current of Inverter-Interfaced Renewable Energy Generators with Fault-Ride-Through Capability. Sustainability, 10(1), 44. https://doi.org/10.3390/su10010044