Multiobjective Genetic Algorithm-Based Optimization of PID Controller Parameters for Fuel Cell Voltage and Fuel Utilization


Abstract
:1. Introduction
2. Problem Description
2.1. Dynamic Model for an SOFC
- Both hydrogen and air are preheated to a specific temperature before entering the anode and cathode;
- Both hydrogen and air are in full contact with the anode and cathode, and the stoichiometric quantity of oxygen at the cathode is sufficiently large;
- A large stoichiometric quantity of oxygen exists at the cathode;
- The oxygen concentration in the air is 21%;
- The whole stack can be presented as a combination of individual stacks;
- Ideal gas laws are employed for both the fuel flow and air flow.
2.1.1. Electrochemical Model
2.1.2. Mass Balance Model
2.1.3. Energy Balance Model
- Cell tube:
- Fuel:
- Air between the cell tube and the AST:
- AST:
- Air in the AST:
2.2. Control Problems
- High coupling: The SOFC is a coupled system, which makes its controller design challenging and complicated;
- Frequent disturbance: Due to the frequent change of the load, a continual disturbance exists in the system, which requires the controller to have strong robustness and accurate control performance;
- Conflicting objectives: The accuracy of the control performance of Vout and FU are the two conflicting objectives. However, to improve the power quality of the SOFC, both objectives need to be optimized at the same time.
3. Controller Design
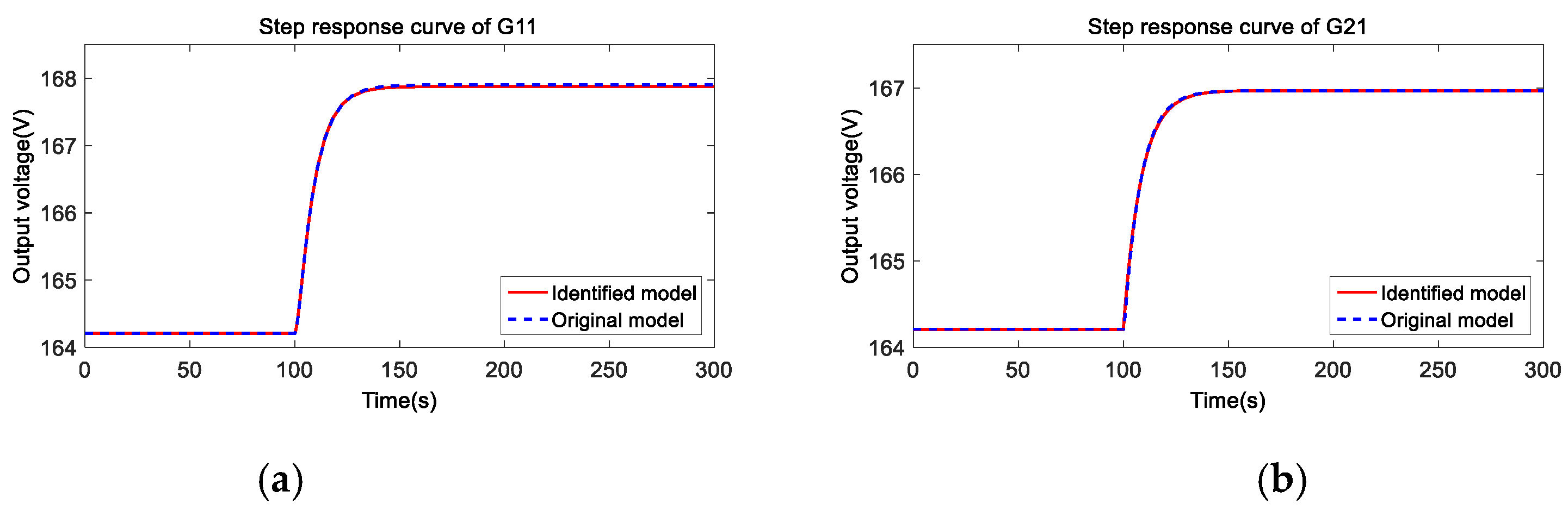
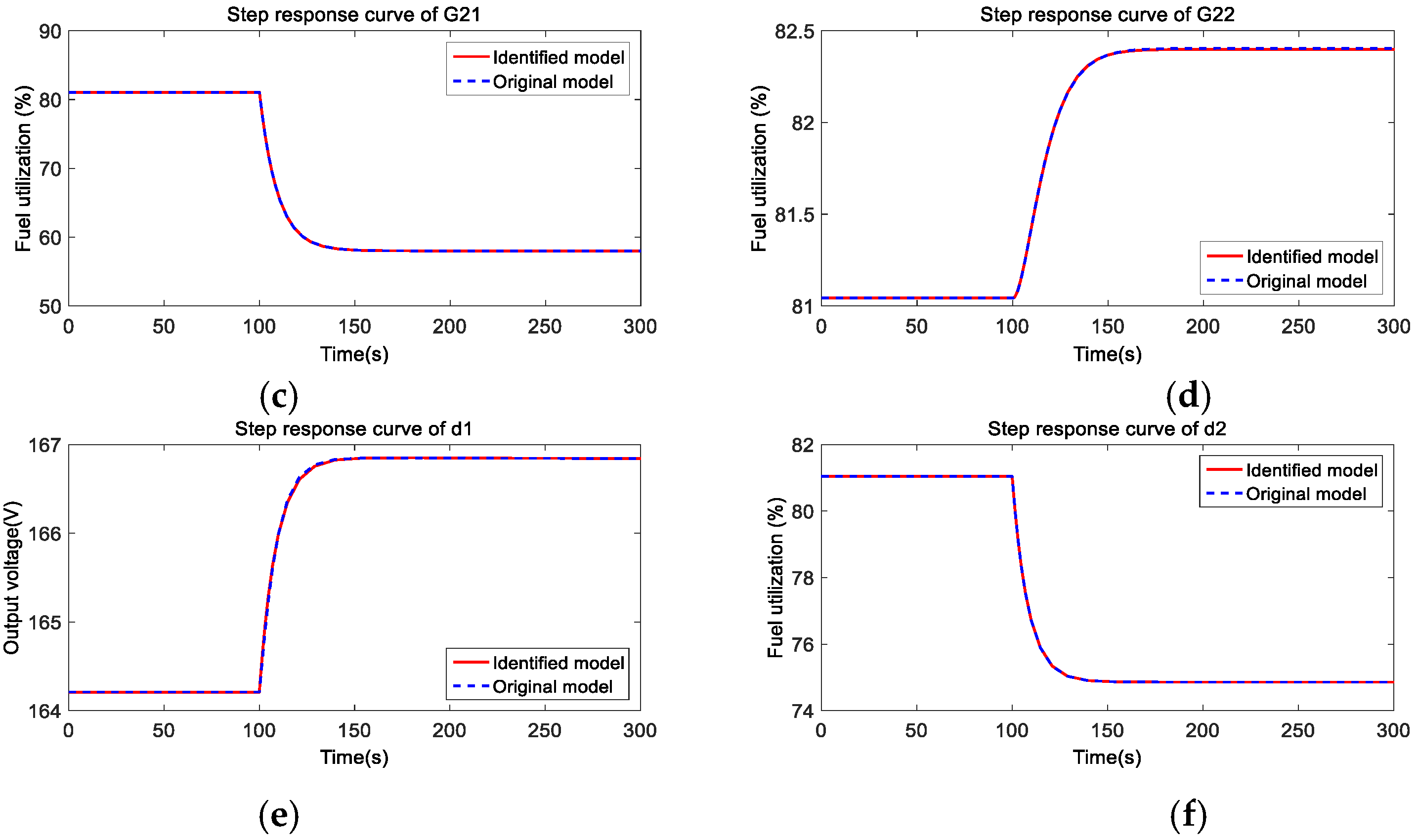
3.1. Model Identification
3.2. Relative Gain Array (RGA) Paring
3.3. Controller Design
4. Solution Method
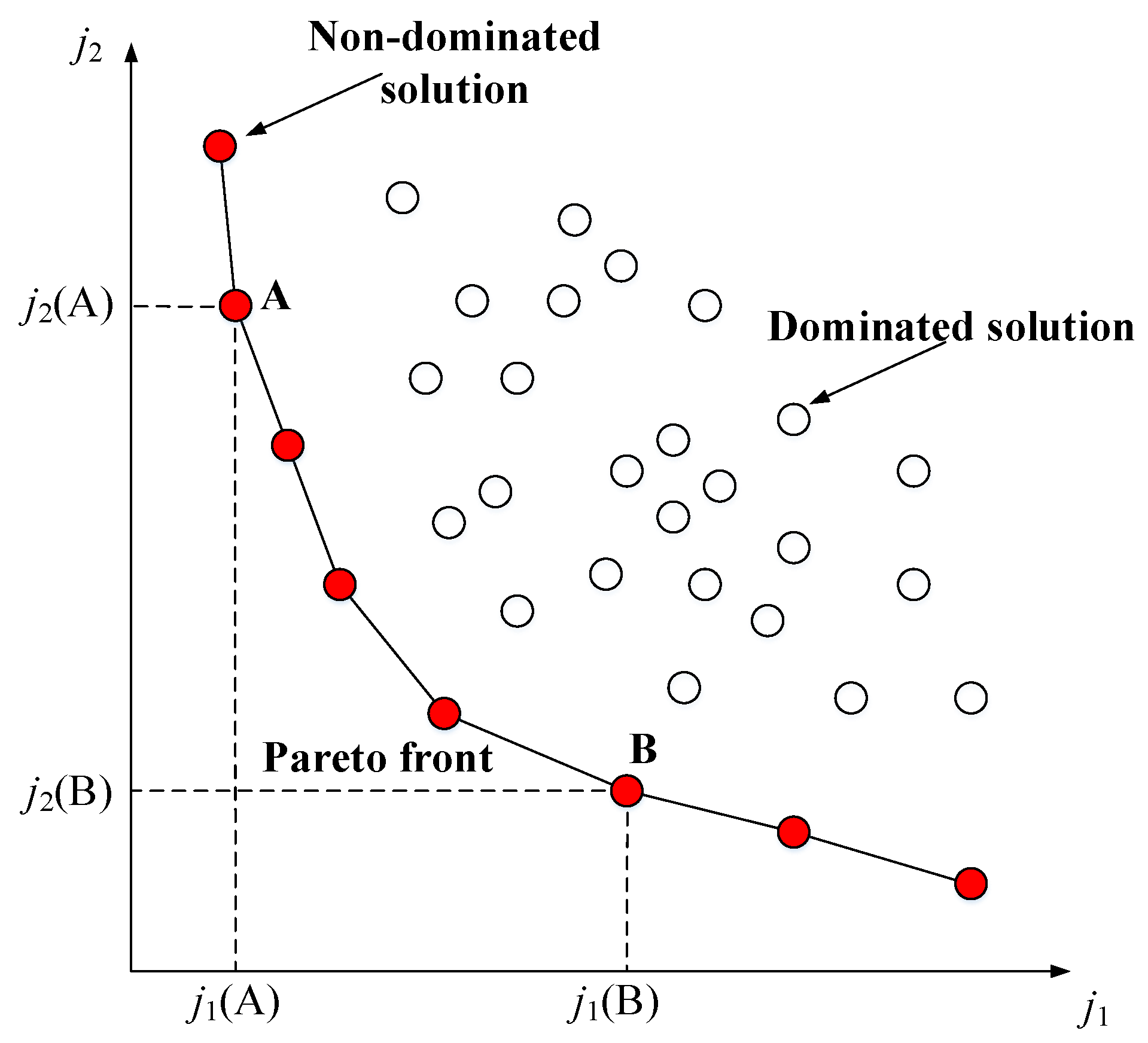
4.1. Introduction of Multiobjective Optimization based on a Genetic Algorithm
4.2. Optimization of the Control Parameters of the SOFC
- The number of generations is higher than the maximum number of iterations;
- The average relative change in the spread of the Pareto solutions over 100 generations is less than 10−4, and the spread is smaller than the average spread over the last 100 generations.
5. Results and Discussion
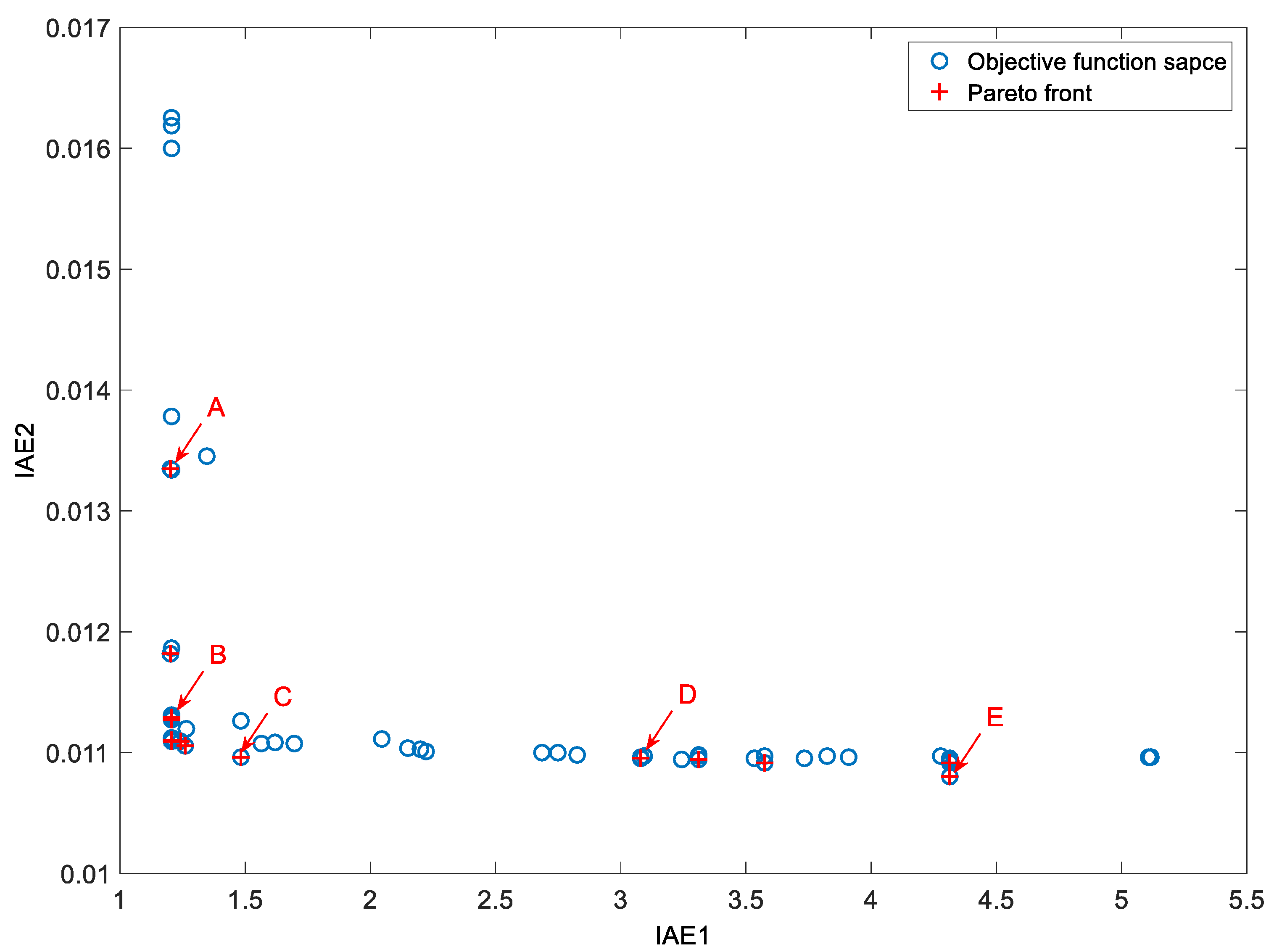
5.1. Comparison of the Optimal Points
5.1.1. Simulation Results
5.1.2. Discussion
5.2. Continuous Disturbance Response Simulation
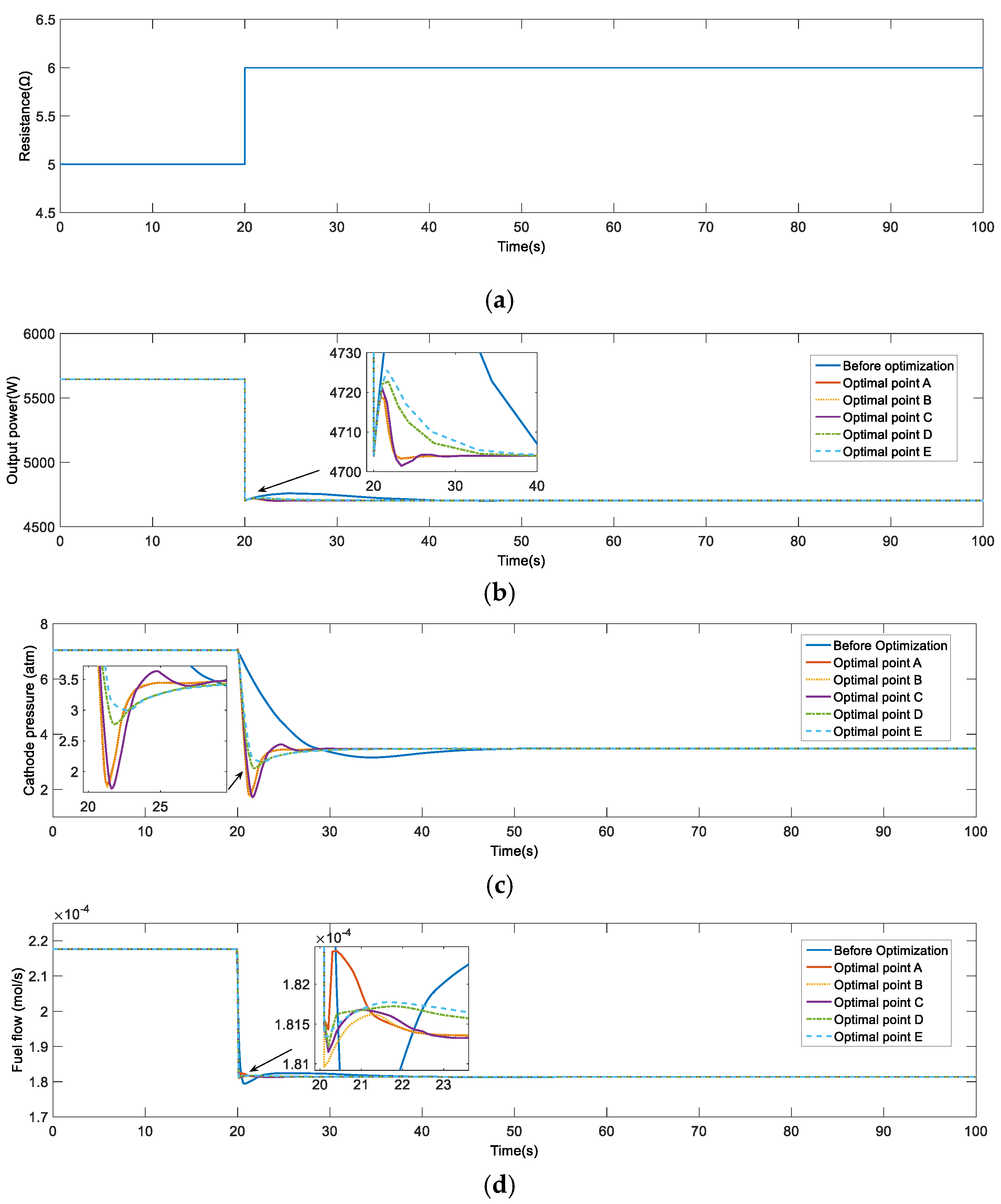
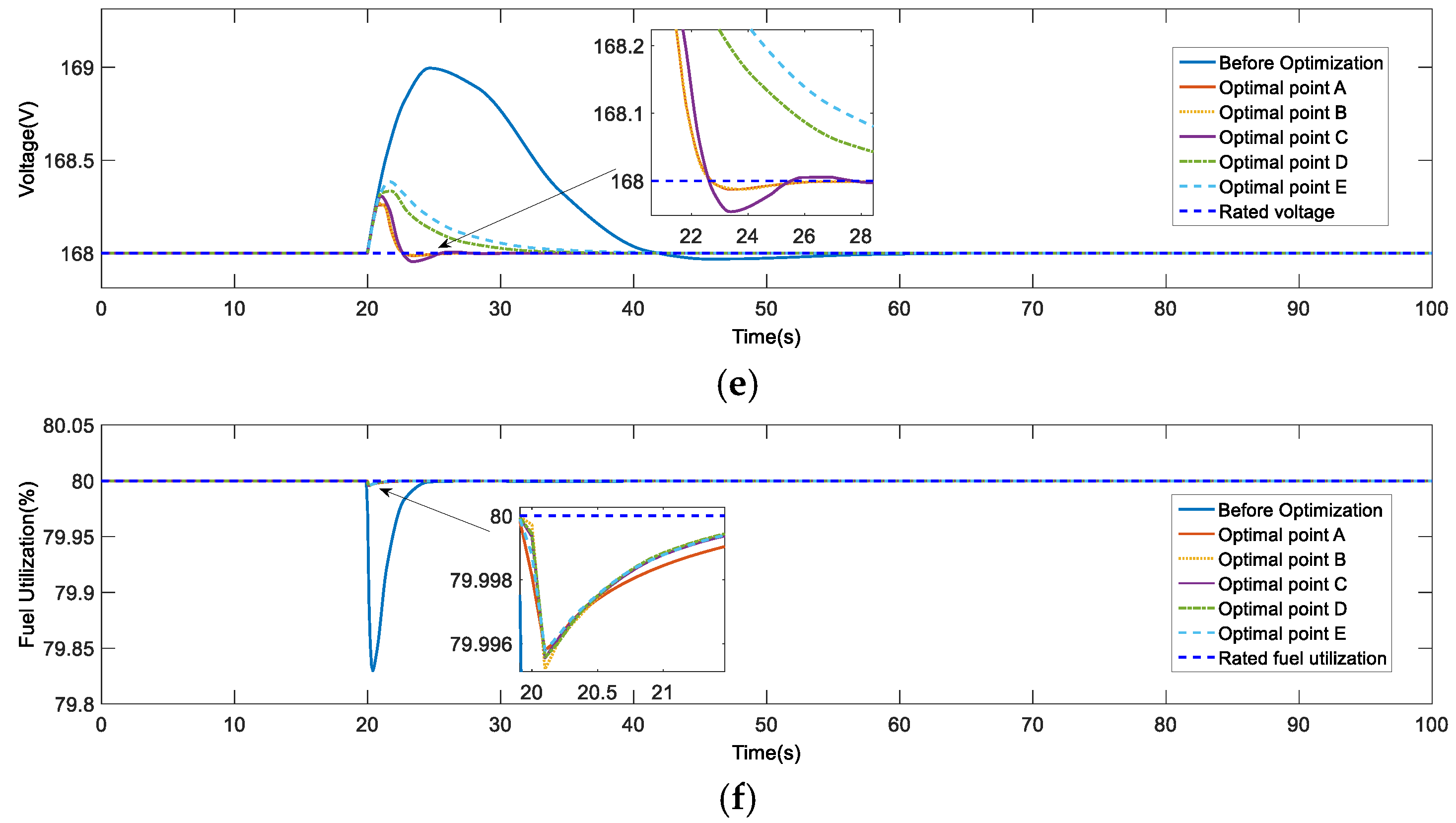
5.2.1. Resistance Disturbance Response Simulation
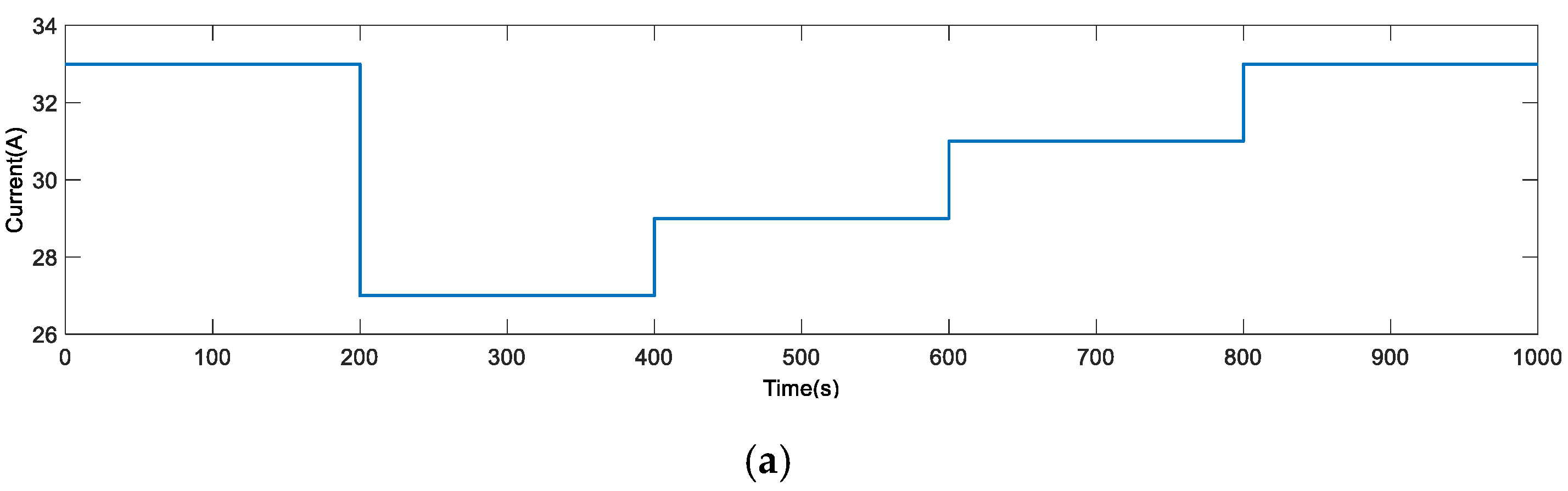
5.2.2. Current Disturbance Response Simulation
5.2.3. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Nomenclature | |
| A | area (m2) |
| a | Constant material resistance (Ω∙m) |
| b | Constant material resistance (K) |
| C | Heat capacity [J/(mol∙K)] |
| E | Reversible potential (V) |
| F | Faraday constant, 96487 (C/mol) |
| h | Heat transfer coefficient [W/(m2·K)] |
| I, i | Current (A) |
| i0 | Exchange current (A) |
| M | Mole flow rate (mol/s) |
| m | Mass (kg) |
| N | Number of cells in the stack |
| P, p | Pressure (atm) |
| q | Energy (J) |
| R | Gas constant, 8.3143 J/(mol·K), or resistance (Ω) |
| T | Temperature (K) |
| V | Voltage (V) |
| x | Mole fraction |
| δ | Length/thickness (m) |
| ε | Emissivity |
| σ | Stefan–Boltzmann constant, 5.67 × 10−8 (W·m−2·K−4.) |
| Superscripts and subscripts | |
| act | Activation |
| air | Conditions for air |
| an | Anode |
| ann | Annulus of the cell |
| AST | Air supply tube |
| ca | Cathode |
| cell | Conditions for individual cell |
| chem | Chemical |
| con | Concentration |
| conv | Convective |
| ele | Electticity |
| flow | Flow heat exchange |
| fuel | Conditions for fuel |
| gen | Generated |
| H2 | Hydrogen |
| H2O | Water |
| in | Conditions of input/inlet |
| inner | Inner conditions |
| itc | Interconnection between cells |
| net | Net values |
| O2 | Oxygen |
| ohm | Ohmic |
| out | Conditions of output/outlet |
| outer | Outer conditions |
| rad | Radiation |
| ref | Reference value |
References
- Sun, L.; Shen, J.; Hua, Q.; Lee, K. Data-driven oxygen excess ratio control for proton exchange membrane fuel cell. Appl. Energy 2018, 231, 866–875. [Google Scholar] [CrossRef]
- Lou, Y.; Liao, Z.; Sun, J.; Jiang, B.; Wang, J.; Yang, Y. A novel two-step method to design inter-plant hydrogen network. Int. J. Hydrog. Energy 2019, 44, 5686–5695. [Google Scholar] [CrossRef]
- Sun, L.; Wu, G.; Xue, Y.; Shen, J.; Li, D.; Lee, K.Y. Coordinated control strategies for fuel cell power plant in a microgrid. IEEE Trans. Energy Convers. 2017, 33, 1–9. [Google Scholar] [CrossRef]
- Sun, L.; Hua, Q.; Shen, J.; Xue, Y.; Li, D.; Lee, K. A combined voltage control strategy for fuel cell. Sustainability 2017, 9, 1517. [Google Scholar] [CrossRef]
- Wu, L.; Sun, L.; Shen, J.; Hua, Q. Multiple model predictive hybrid feedforward control of fuel cell power generation system. Sustainability 2018, 10, 437. [Google Scholar] [CrossRef]
- Wei, L.; Shen, Y.; Liao, Z.; Sun, J.; Jiang, B.; Wang, J.; Yang, Y. Balancing between risk and profit in refinery hydrogen networks: A Worst-Case Conditional Value-at-Risk approach. Chem. Eng. Res. Des. 2019, 146, 201–210. [Google Scholar] [CrossRef]
- Rao, M.; Fernandes, A.; Pronk, P.; Aravind, P.V. Design, modelling and techno-economic analysis of a solid oxide fuel cell-gas turbine system with CO2 capture fueled by gases from steel industry. Appl. Therm. Eng. 2019, 148, 1258–1270. [Google Scholar] [CrossRef]
- Xia, C.; Qiao, Z.; Feng, C.; Kim, J.-S.; Wang, B.; Zhu, B. Study on Zinc Oxide-Based Electrolytes in Low-Temperature Solid Oxide Fuel Cells. Materials 2018, 11, 40. [Google Scholar] [CrossRef]
- Wang, W.; Qu, J.; Julião, P.S.B.; Shao, Z. Recent Advances in the Development of Anode Materials for Solid Oxide Fuel Cells Utilizing Liquid Oxygenated Hydrocarbon Fuels: A Mini Review. Energy Technol. 2019, 7, 33–44. [Google Scholar] [CrossRef]
- Li, Y.H.; Rajakaruna, S.; Choi, S.S. Control of a Solid Oxide Fuel Cell Power Plant in a Grid-Connected System. IEEE Trans. Energy Convers. 2007, 22, 405–413. [Google Scholar] [CrossRef]
- Jacobsen, L.T.; Spivey, B.J.; Hedengren, J.D. Model predictive control with a rigorous model of a Solid Oxide Fuel Cell. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013; p. 3741. [Google Scholar]
- Pohjoranta, A.; Halinen, M.; Pennanen, J.; Kiviaho, J. Model predictive control of the solid oxide fuel cell stack temperature with models based on experimental data. J. Power Sources 2015, 277, 239–250. [Google Scholar] [CrossRef]
- Oh, S.-R.; Sun, J.; Dobbs, H.; King, J. Model Predictive Control for Power and Thermal Management of an Integrated Solid Oxide Fuel Cell and Turbocharger System. IEEE Trans. Control Syst. Technol. Control Syst. Technol. 2014, 22, 911–920. [Google Scholar]
- Qin, Y.; Sun, L.; Hua, Q.; Liu, P. A Fuzzy Adaptive PID Controller Design for Fuel Cell Power Plant. Sustainability 2018, 10, 2438. [Google Scholar] [CrossRef]
- Sakhare, A.R.; Davari, A.; Feliachi, A. Control of stand alone solid oxide fuel cell using fuzzy logic. In Proceedings of the 35th Southeastern Symposium on System Theory, Morgantown, WV, USA, 18 March 2003; p. 473. [Google Scholar]
- Ji, N.; Xu, D.; Liu, F. A novel adaptive neural network constrained control for solid oxide fuel cells via dynamic anti-windup. Neurocomputing 2016, 214, 134–142. [Google Scholar] [CrossRef]
- Qin, Y.; Sun, L.; Hua, Q. Environmental health oriented optimal temperature control for refrigeration systems based on a fruit fly intelligent algorithm. Int. J. Environ. Res. Public Health 2018, 15, 2865. [Google Scholar] [CrossRef] [PubMed]
- Zamani, M.; Karimi-Ghartemani, M.; Sadati, N.; Parniani, M. Design of a fractional order PID controller for an AVR using particle swarm optimization. Control Eng. Pract. 2009, 17, 1380–1387. [Google Scholar] [CrossRef]
- Elbayomy, K.M.; Zongxia, J.; Huaqing, Z. PID Controller Optimization by GA and Its Performances on the Electro-hydraulic Servo Control System. Chin. J. Aeronaut. 2008, 21, 378–384. [Google Scholar] [CrossRef] [Green Version]
- Sun, L.; Shen, J.; Hua, Q.; Xue, Y.; Li, D.; Lee, K.Y. Multi-objective optimization for advanced superheater steam temperature control in a 300 MW power plant. Appl. Energy 2017, 208, 592–606. [Google Scholar] [CrossRef]
- Wang, P.; Yan, X.; Zhao, F. Multi-objective optimization of control parameters for a pressurized water reactor pressurizer using a genetic algorithm. Ann. Nucl. Energy 2019, 124, 9–20. [Google Scholar] [CrossRef]
- Huang, J.; Liu, Y.; Liu, M.; Cao, M.; Yan, Q. Multi-Objective Optimization Control of Distributed Electric Drive Vehicles Based on Optimal Torque Distribution. IEEE Access 2019, 7, 16377–16394. [Google Scholar] [CrossRef]
- Banos, R.; Manzano-Agugliaro, F.; Montoya, F.; Gil, C.; Alcayde, A.; Gómez, J. Optimization methods applied to renewable and sustainable energy: A review. Renew. Sustain. Energy Rev. 2011, 15, 1753–1766. [Google Scholar] [CrossRef]
- Chan, S.H.; Low, C.F.; Ding, O.L. Energy and exergy analysis of simple solid-oxide fuel-cell power systems. J. Power Sources 2002, 103, 188–200. [Google Scholar] [CrossRef]
- Hatsopoulos, G.N.; Keenan, J.H. Principles of General Thermodynamics; R. E. Krieger Pub. Co.: Huntington, NY, USA, 1981. [Google Scholar]
- Wang, C.; Nehrir, M.H. A Physically Based Dynamic Model for Solid Oxide Fuel Cells. IEEE Trans. Energy Convers. 2008, 22, 887–897. [Google Scholar] [CrossRef]
- Skogestad, S.; Postlethwaite, I. Multivariable Feedback Control: Analysis and Design; John Wiley: Chichester, UK; Hoboken, NJ, USA, 2005. [Google Scholar]
- Dhieb, Y.; Yaich, M.; Guermazi, A.; Ghariani, M. PID Controller Tuning using Ant Colony Optimization for Induction Motor. J. Electr. Syst. 2019, 15, 133–141. [Google Scholar]
- Holland, J.H. Adaptation in Natural and Artificial Systems; University of Michigan Press: Ann Arbor, MI, USA, 1975. [Google Scholar]
- Srinivas, N.; Deb, K. Muiltiobjective optimization using nondominated sorting in genetic algorithms. Evol. Comput. 1994, 2, 221–248. [Google Scholar] [CrossRef]
- Deb, K.; Agrawal, S.; Pratap, A.; Meyarivan, T. A Fast Elitist Non-Dominated Sorting Genetic Algorithm for Multi-Objective Optimization: NSGA-II; Schoenauer, M., Deb, K., Rudolph, G., Yao, X., Lutton, E., Merelo, J.J., Schwefel, H.-P., Eds.; Parallel Problem Solving from Nature PPSN VI; Springer: Berlin/Heidelberg, Germany, 2000; pp. 849–858. [Google Scholar]
- Nagarkar, M.P.; Vikhe Patil, G.J.; Bhalerao, Y.J.; Zaware Patil, R.N. GA-based multi-objective optimization of active nonlinear quarter car suspension system—PID and fuzzy logic control. Int. J. Mech. Mater. Eng. 2018, 13, 10. [Google Scholar] [CrossRef]
- Deb, K.; Jain, H. An Evolutionary Many-Objective Optimization Algorithm Using Reference-Point-Based Nondominated Sorting Approach, Part I: Solving Problems with Box Constraints. IEEE Trans. Evol. Comput. 2014, 18, 577–601. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Parameters | A | B | C | D | E |
|---|---|---|---|---|---|
| kp1 | −0.00753 | −0.00666 | −0.00708 | −0.00677 | −0.00733 |
| ki1 | −0.00981 | −0.00983 | −0.00985 | −0.00999 | −0.00998 |
| kd1 | 8.18 × 10−5 | 7.68 × 10−5 | 5.40 × 10−5 | 6.58 × 10−5 | 5.88 × 10−5 |
| Td1 | 56.01119 | 55.96752 | 68.6119 | 53.9818 | 48.92057 |
| kp2 | 9.950384 | 9.953341 | 7.995275 | 9.506123 | 8.360098 |
| ki2 | 9.977686 | 9.975138 | 9.200353 | 2.342223 | 1.672613 |
| kd2 | −0.92397 | −0.90781 | −0.51078 | −0.63197 | −0.50791 |
| Td2 | 69.30712 | 69.32299 | 51.57974 | 69.18918 | 63.97332 |
| IAE1 | 1.203 | 1.205 | 1.481 | 3.081 | 4.313 |
| IAE2 | 0.0134 | 0.0113 | 0.0111 | 0.011 | 0.0108 |
| Output Variables | Index | Before Optimization | Optimal Point A | Optimal Point B | Optimal Point C | Optimal Point D | Optimal Point E |
|---|---|---|---|---|---|---|---|
| Output Voltage | Overshoot (%) | 0.0227 | 0.0113 | 0.0111 | 0.0211 | 0 | 0 |
| Settling time (s) | 38.231 | 4.293 | 4.356 | 4.903 | 10.865 | 17.108 | |
| IAE1 | 11.7506 | 0.2897 | 0.2924 | 0.3495 | 0.8972 | 2.0206 | |
| Fuel Utilization | Overshoot (%) | 0 | 0 | 0 | 0 | 0 | 0 |
| Settling time (s) | 4.832 | 1.225 | 0.927 | 0.0937 | 0.0652 | 0.0623 | |
| IAE2 | 0.2611 | 0.0037 | 0.0028 | 0.0025 | 0.0018 | 0.0017 |
| Output Variables | Number | Optimal Controller | Original Controller | ||
|---|---|---|---|---|---|
| Overshoot (%) | Settling Time (s) | Overshoot (%) | Settling Time (s) | ||
| Output Voltage | 1 | 0 | 9.6 | 0.012 | 30.3 |
| 2 | 0 | 9.3 | 0.007 | 24.5 | |
| 3 | 0 | 8.5 | 0 | 18.1 | |
| 4 | 0 | 16.4 | 0.060 | 46.2 | |
| Fuel Utilization | 1 | 0 | 1.4 | 0 | 5.4 |
| 2 | 0 | 1.5 | 0 | 5.2 | |
| 3 | 0 | 1.1 | 0 | 4.8 | |
| 4 | 0 | 2.4 | 0 | 6.8 | |
| Output Variables | Number | Optimal Controller | Original Controller | ||
|---|---|---|---|---|---|
| Overshoot (%) | Settling Time (s) | Overshoot (%) | Settling Time (s) | ||
| Output Voltage | 1 | 0 | 17.3 | 0.018 | 37.6 |
| 2 | 0 | 11.9 | 0.009 | 38.8 | |
| 3 | 0 | 12.7 | 0.012 | 40.5 | |
| 4 | 0 | 12.1 | 0.015 | 50.3 | |
| Fuel utilization | 1 | 0 | 2.2 | 0 | 6.5 |
| 2 | 0 | 1.5 | 0 | 5.6 | |
| 3 | 0 | 1.4 | 0 | 5.2 | |
| 4 | 0 | 1.8 | 0 | 6.7 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, Y.; Zhao, G.; Hua, Q.; Sun, L.; Nag, S. Multiobjective Genetic Algorithm-Based Optimization of PID Controller Parameters for Fuel Cell Voltage and Fuel Utilization. Sustainability 2019, 11, 3290. https://doi.org/10.3390/su11123290
Qin Y, Zhao G, Hua Q, Sun L, Nag S. Multiobjective Genetic Algorithm-Based Optimization of PID Controller Parameters for Fuel Cell Voltage and Fuel Utilization. Sustainability. 2019; 11(12):3290. https://doi.org/10.3390/su11123290
Chicago/Turabian StyleQin, Yuxiao, Guodong Zhao, Qingsong Hua, Li Sun, and Soumyadeep Nag. 2019. "Multiobjective Genetic Algorithm-Based Optimization of PID Controller Parameters for Fuel Cell Voltage and Fuel Utilization" Sustainability 11, no. 12: 3290. https://doi.org/10.3390/su11123290
APA StyleQin, Y., Zhao, G., Hua, Q., Sun, L., & Nag, S. (2019). Multiobjective Genetic Algorithm-Based Optimization of PID Controller Parameters for Fuel Cell Voltage and Fuel Utilization. Sustainability, 11(12), 3290. https://doi.org/10.3390/su11123290