Truck Arrivals Scheduling with Vessel Dependent Time Windows to Reduce Carbon Emissions

Abstract
:1. Introduction
2. Literature Review
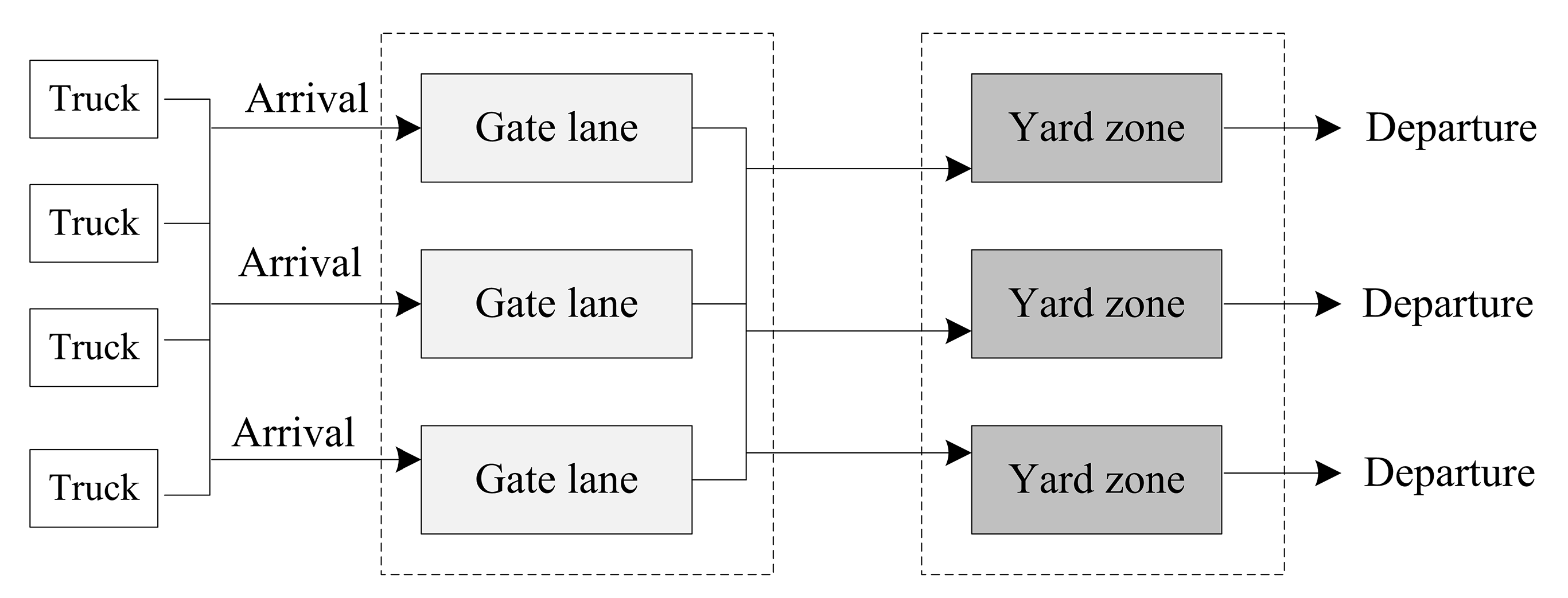
3. Problem Description
- (1)
- CU KS test
- (2)
- Log KS test
4. Truck Appointment Model for Container Delivery
4.1. Model Assumptions
- Container vessels provide weekly liner service, so the planning period is one week;
- The service capacity of each gate lane is the same, and the service capacity of each RTGC is the same;
- The export containers on each vessel are centralized stores at several designated blocks in a certain proportion;
- The gate lanes for delivery trucks and pickup trucks are set separately. Moreover, the export containers and import containers are stored at different blocks. Therefore, the influence of pickup trucks on delivery trucks is not considered;
- Each block deploys K RTGCs, which only serve outside delivery trucks without inside trucks. RTGCs scheduling between different blocks is not considered. Since there will be containers arriving at the port on each vessel in each period, RTGCs have no time to serve other blocks with higher utilization rate;
- In the gate layer, the gate lanes with single waiting lines can be viewed as multiple independent M(t)/M/1 queuing processes. In the yard layer, the yard blocks can be viewed as multiple independent M(t)/G/K queuing processes;
- The ending point of the truck arrival time window for each vessel has to be earlier than the corresponding vessel arrival time so that the terminal has enough time to arrange shipment;
- Considering the capacity limitation of the yard, when the queue length of trucks at a yard block reaches the upper limit, the delivery trucks are not allowed to enter the gate.
4.2. Variable Definitions
- : Index of vessel, , where is the number of vessels;
- : The estimated time of arrival of vessel (h);
- : The estimated time of departure of vessel (h);
- : The volume of export containers related to vessel (natural container);
- : The CO2 emission factor of a delivery truck per hour while idling (kg/h);
- : The CO2 emission factor of a RTGC per hour while idling (kg/h);
- N: Planning horizon (day);
- p: Index of appointment periods, where the planning horizon is divided into P periods, ;
- t: Index of fluid-based modeling time intervals, where the planning horizon is divided into T time intervals ;
- : The average loading rate of delivery trucks;
- i: Index of gate lane, , where I is the number of gate lanes;
- j: Index of yard block, , where J is the number of yard blocks;
- : Index of RTGC deployed to one block, ;
- : The ratio of export containers of vessel stored at block j;
- : The set of vessels whose export container are stored at block j;
- : The service rate of gate lanes i at interval t (truck/h);
- : The service rate of the RTGC k deployed to block j at interval t (natural container/h);
- : The coefficient of variation of service time distribution of a RTGC;
- : The minimum length of time window for export containers on an arriving vessel;
- : The maximum length of time window for export containers on an arriving vessel;
- : The maximum storage capacity of block j;
- : The maximum of containers waiting in the queue at each block.
- : The number of time intervals included in one appointment period;
- : The appointment quota of export containers related to vessel z (arriving at terminal gate) at appointment period p;
- : The number of trucks related to vessel z arriving at terminal gate at interval t;
- : The number of trucks arriving at gate lane i at interval t;
- : The average number of trucks waiting in queue at gate lane i at interval t;
- : The actual discharge rate of gate lane i at interval t (truck/min);
- : The capacity utilization rate of gate lane i at interval t;
- : The average waiting time of trucks at terminal gate during appointment period p (min);
- : The average waiting time of trucks at terminal gate during the planning horizon (min);
- : The number of export containers arriving at yard at interval t;
- : The number of export containers arriving at block j at interval t;
- : The number of export containers waiting at block j at interval t;
- : The discharge rate of RTGC k deployed to block j at interval t (natural container/min);
- : The average utilization rate of RTGC k deployed to block j at interval t;
- : The average waiting time of trucks at block j in appointment period p (min);
- : The average waiting time of trucks at yard in the planning horizon (min);
- : , if vessel z has departed at appointment period p; , if vessel z is berthing in the marine container terminal at appointment period p.
- : The starting appointment period for delivery trucks related to vessel z;
- : The ending appointment period for delivery trucks related to vessel z.
4.3. Optimization Model
4.3.1. Objective Function
4.3.2. Time Window Optimization
4.3.3. Constraints at Gate
4.3.4. Constraints at Yard
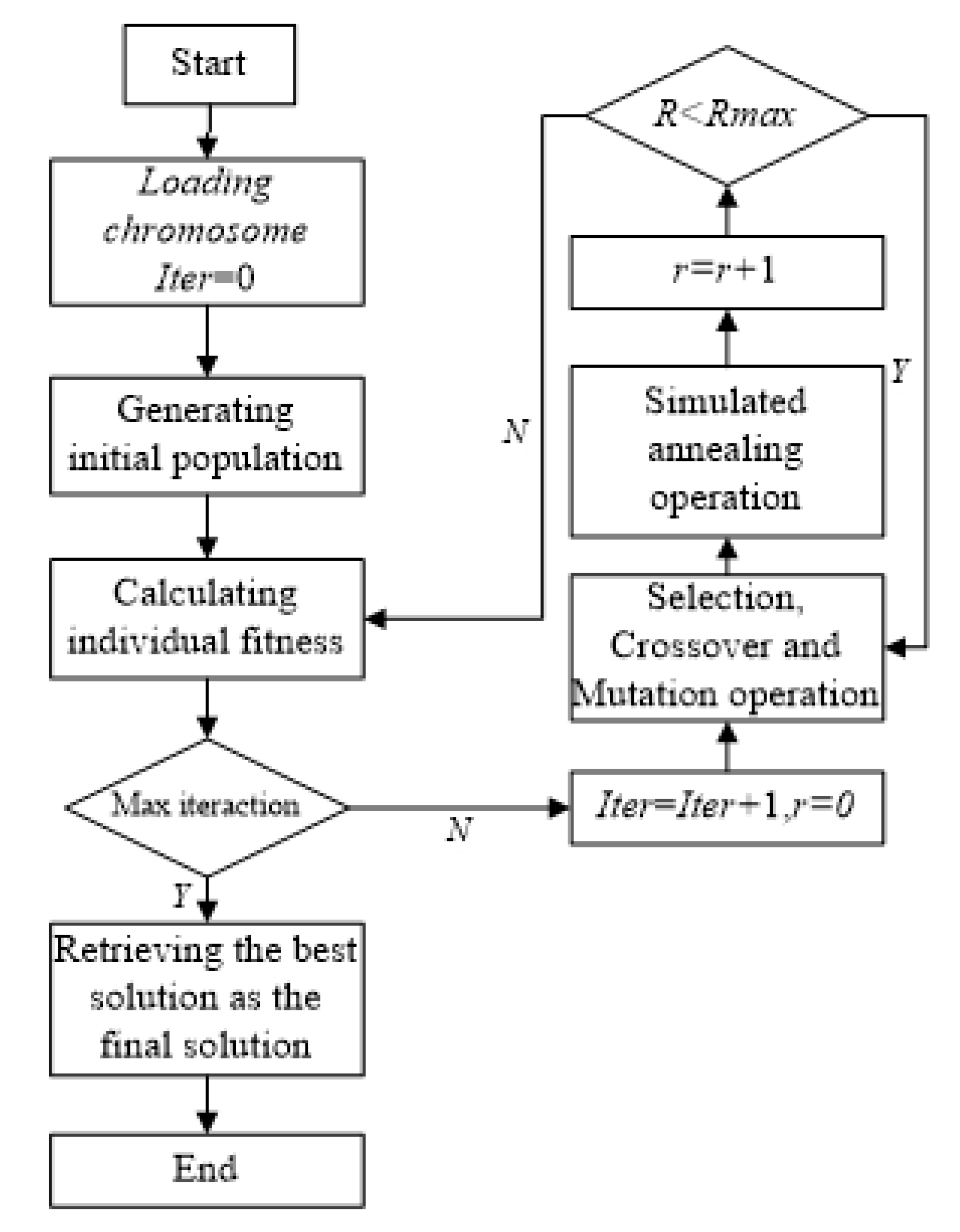
5. Solution Methodology
6. Numerical Experiments
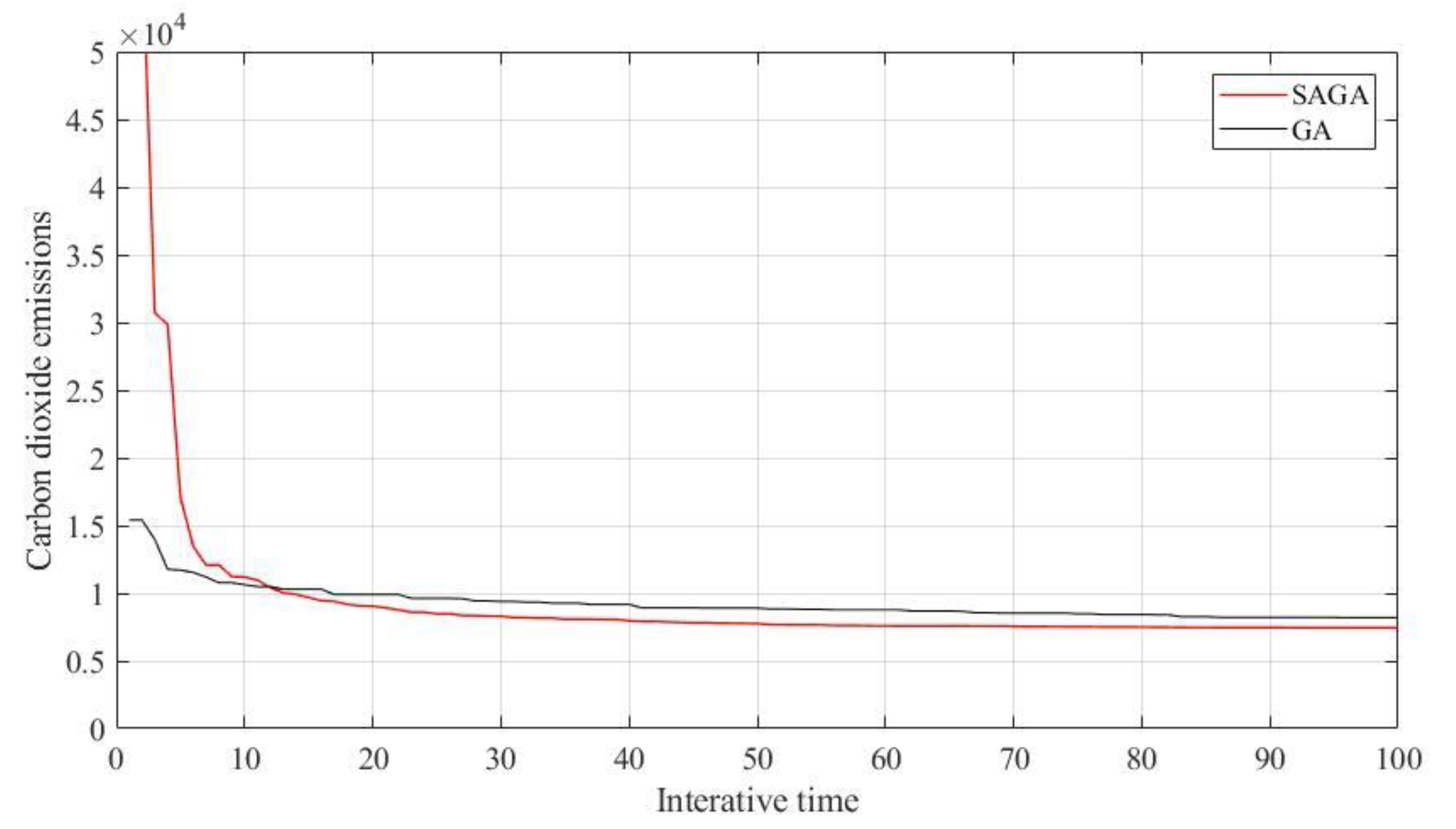
6.1. Algorithms Comparison
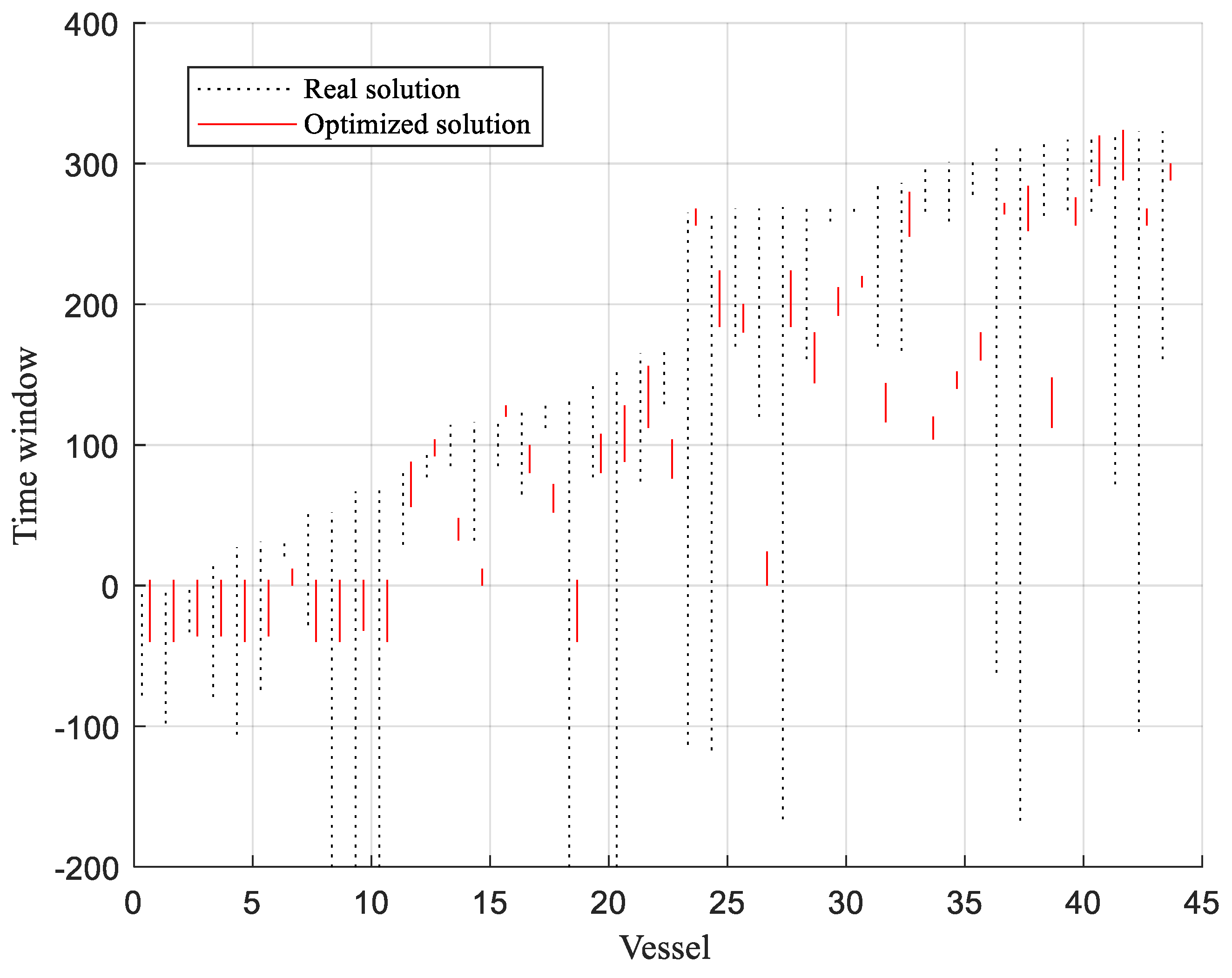
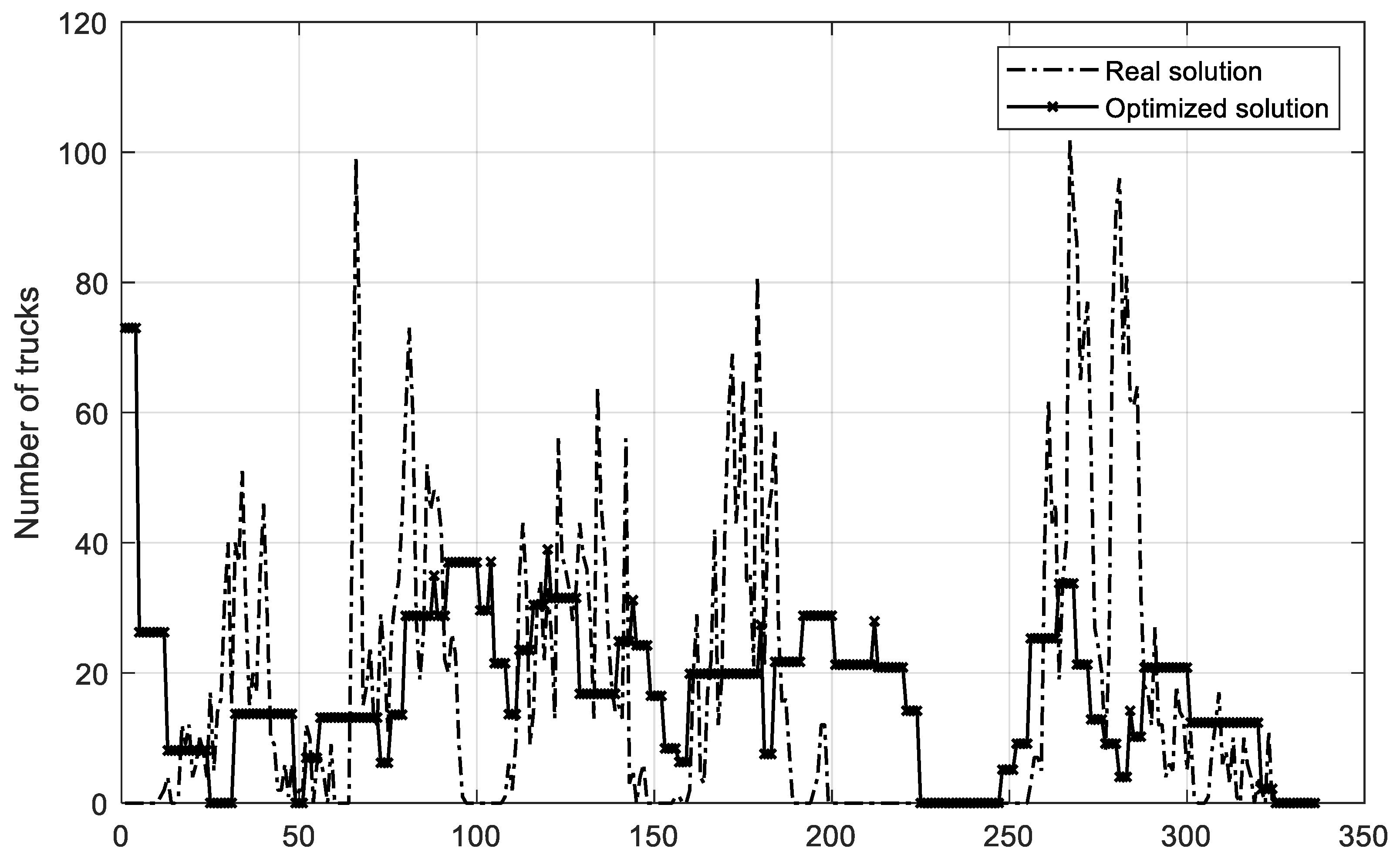
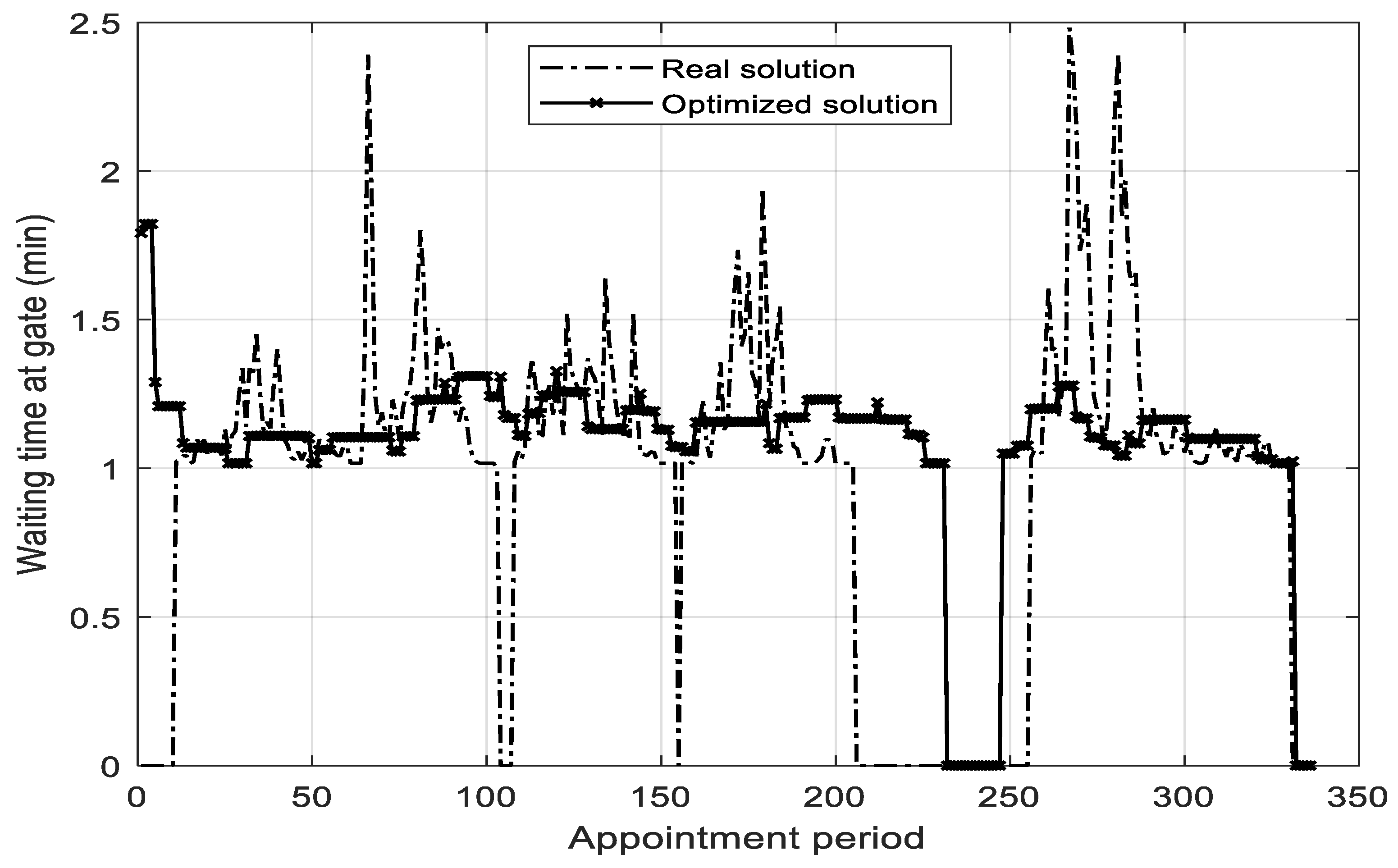
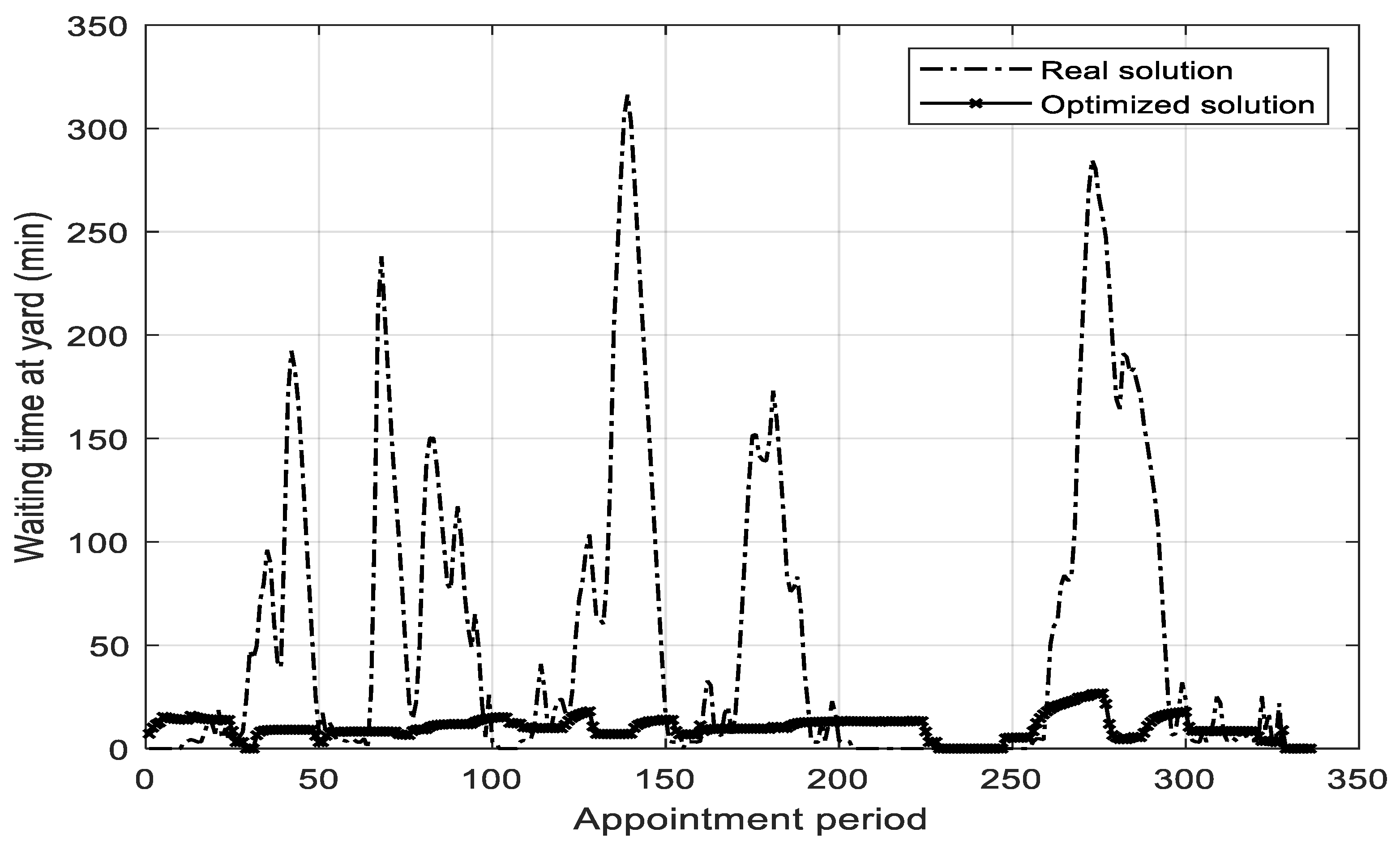
6.2. Optimization Result
6.3. Scenario Analysis
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wan, C.; Yan, X.; Zhang, D.; Qu, Z.; Yang, Z. An advanced fuzzy Bayesian-based FMEA approach for assessing maritime supply chain risks. Transp. Res. E-Logist. 2019, 125, 222–240. [Google Scholar] [CrossRef]
- UNCTAD. Review of Maritime Transport; United Nations Conference on Trade and Development: New York, NY, USA; Geneva, Switzerland, 2019. [Google Scholar]
- Xiang, X.; Liu, C.; Miao, L. Reactive strategy for discrete berth allocation and quay crane assignment problems under uncertainty. Comput. Ind. Eng. 2018, 126, 196–216. [Google Scholar] [CrossRef]
- Munim, Z.H.; Schramm, H.J. The impacts of port infrastructure and logistics performance on economic growth: The mediating role of seaborne trade. J. Ship. Trade 2018, 3, 1–19. [Google Scholar] [CrossRef]
- IMO. Third IMO GHG Study 2014. Available online: http://www.imo.org/en/OurWork/Environment/PollutionPrevention/AirPollution/Pages/Greenhouse-Gas-Studies-2014.aspx (accessed on 2 November 2018).
- Dulebenets, M.A. Green vessel scheduling in liner shipping: Modeling carbon dioxide emission costs in sea and at ports of call. Int. J. Transp. Sci. Technol. 2018, 7, 26–44. [Google Scholar] [CrossRef]
- Peng, Y.; Wang, W.; Song, X.; Zhang, Q. Optimal allocation of resources for yard crane network management to minimize carbon dioxide emissions. J. Clean. Prod. 2016, 131, 649–658. [Google Scholar] [CrossRef]
- Chen, X.; Zhou, X.; List, G.F. Using time-varying tolls to optimize truck arrivals at ports. Transp. Res. E-Logist. 2011, 47, 965–982. [Google Scholar] [CrossRef]
- Wagner, I. Container Shipping—Statistics & Facts. Available online: https://www.statista.com/topics/1367/container-shipping/ (accessed on 2 November 2018).
- Lalla-Ruiz, E.; Expósito-Izquierdo, C.; Melián-Batista, B.; Moreno-Vega, J.M. A set-partitioning-based model for the berth allocation problem under time-dependent limitations. Eur. J. Oper. Res. 2016, 250, 1001–1012. [Google Scholar] [CrossRef]
- Ursavas, E.; Zhu, S.X. Optimal policies for the berth allocation problem under stochastic nature. Eur. J. Oper. Res. 2016, 255, 380–387. [Google Scholar] [CrossRef]
- Zhen, L.; Liang, Z.; Zhuge, D.; Lee, L.H.; Chew, E.P. Daily berth planning in a tidal port with channel flow control. Transp. Res. B-Methodol. 2017, 106, 193–217. [Google Scholar] [CrossRef]
- Fonseca, G.B.; Nogueira, T.H.; Ravetti, M.G. A hybrid Lagrangian metaheuristic for the cross-docking flow shop scheduling problem. Eur. J. Oper. Res. 2019, 275, 139–154. [Google Scholar] [CrossRef]
- Lee, B.K.; Kim, K.H. Comparison and evaluation of various cycle-time models for yard cranes in container terminals. Int. J. Prod. Econ. 2010, 126, 350–360. [Google Scholar] [CrossRef]
- Dulebenets, M.A. The vessel scheduling problem in a liner shipping route with heterogeneous fleet. Int. J. Civ. Eng. 2018, 16, 19–32. [Google Scholar] [CrossRef]
- Motono, I.; Furuichi, M.; Ninomiya, T.; Suzuki, S.; Fuse, M. Insightful observations on trailer queues at landside container terminal gates: What generates congestion at the gates? Res. Transp. Bus. Manag. 2016, 19, 118–131. [Google Scholar] [CrossRef]
- Giuliano, G.; O’Brien, T. Reducing port-related truck emissions: The terminal gate appointment system at the Ports of Los Angeles and Long Beach. Transp. Res. D-TR. E 2007, 12, 460–473. [Google Scholar] [CrossRef]
- Mani, A.; Fischer, M.J. FHWA Operations Support-Port Peak Pricing Program Evaluation; Federal Highway Administration: Washington, DC, USA, 2009.
- Zeng, Q.; Chen, W.; Huang, L. A model and its algorithms for truck congestion toll at container terminals. J. Dalian Univ. Technol. 2015, 55, 73–80. [Google Scholar]
- Sharif, O.; Huynh, N.; Vidal, J.M. Application of El Farol model for managing marine terminal gate congestion. Res. Transp. Econ. 2011, 32, 81–89. [Google Scholar] [CrossRef]
- Chen, G.; Govindan, K.; Yang, Z. Managing truck arrivals with time windows to alleviate gate congestion at container terminals. Int. J. Prod. Econ. 2013, 141, 179–188. [Google Scholar] [CrossRef]
- Wei, H. Optimal pickup time windows allocation at container terminal. J. Manag. Sci. China 2011, 14, 21–36. [Google Scholar]
- Chen, G.; Jiang, L. Managing customer arrivals with time windows: A case of truck arrivals at a congested container terminal. Ann. Oper. Res. 2016, 244, 349–365. [Google Scholar] [CrossRef]
- Guo, Z.; Fan, H.; Ma, M.; Li, Y. Optimization model for appointment of delivery trucks based on vessel dependent time windows. Ind. Eng. Manag. 2017, 22, 24–30. [Google Scholar]
- Morais, P.; Lord, E. Terminal Appointment System Study; Canada Csa Final Report Copy: Montreal, QC, Canada, 2006.
- Huynh, N.; Walton, C.M. Robust scheduling of truck arrivals at marine container terminals. J. Transp. Eng. 2008, 134, 347–353. [Google Scholar] [CrossRef]
- Namboothiri, R.; Erera, A.L. Planning local container drayage operations given a port access appointment system. Transp. Res. E-Logist. 2008, 44, 185–202. [Google Scholar] [CrossRef]
- Kim, K.H.; Kim, H.B. The optimal sizing of the storage space and handling facilities for import containers. Transp. Res. B-Methodol. 2002, 36, 821–835. [Google Scholar] [CrossRef]
- Guan, C.; Liu, R.R. Container terminal gate appointment system optimization. Marit. Econ. Logist. 2009, 11, 378–398. [Google Scholar] [CrossRef]
- Zeng, Q.C.; Zhang, X.J.; Chen, W.H.; Zhu, X.C. Optimization model for truck appointment based on BCMP queuing network. J. Syst. Eng. 2013, 28, 592–599. [Google Scholar]
- Zhang, X.; Zeng, Q.; Chen, W. Optimization Model for Truck Appointment in Container Terminals. Proc.-Soc. Behav. Sci. 2013, 96, 1938–1947. [Google Scholar] [CrossRef]
- Xu, Q.L.; Sun, L.J.; Hu, X.P.; Wu, R.L. Optimization model for appointment of container trucks with non-stationary arrivals. J. Dalian Univ. Technol. 2014, 54, 589–596. [Google Scholar]
- Zhang, X.; Zeng, Q.; Chen, W. Optimization model of terminal container truck appointment based on coordinated service of inner and outer container trucks. J. Traffic Transp. Eng. 2016, 16, 115–122. [Google Scholar]
- Jiang, M.; Zhang, X.; Feng, D.; Cai, Q.; Wang, Z. Study on appointment scheduling model of container port truck based on poisson process. J. Zhejiang Univ. Technol. 2016, 44, 292–298. [Google Scholar]
- Yang, H.; Shao, Q.; Geng, F.; Jin, Z. Collaborative optimization of yard crane deployment and truck appointment based on two-way transmission of information. J. Dalian Maritime Univ. 2017, 43, 29–38. [Google Scholar]
- Ma, M.; Fan, H.; Ji, M.; Guo, Z. Integrated Optimization of Truck Appointment for Export Containers and Crane Deployment in a Container Terminal. J. Transp. Syst. Eng. Inf. Technol. 2018, 18, 202–209. [Google Scholar]
- Goldsworthy, L.; Goldsworthy, B. Modelling of ship engine exhaust emissions in ports and extensive coastal waters based on terrestrial AIS data—An Australian case study. Environ. Model. Softw. 2015, 63, 45–60. [Google Scholar] [CrossRef]
- López-Aparicio, S.; Tønnesen, D.; Thanh, T.N.; Neilson, H. Shipping emissions in a Nordic port: Assessment of mitigation strategies. Transport. Res. D-TR. E 2017, 53, 205–216. [Google Scholar] [CrossRef]
- Nunes, R.A.O.; Alvim-Ferraz, M.C.M.; Martins, F.G.; Sousa, S.I.V. Assessment of shipping emissions on four ports of Portugal. Environ. Pollut. 2017, 231, 1370–1379. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.; Ge, Y.E.; Chen, J.; Luo, L.; Tan, C.; Liu, D. CO2 emission evaluation of yard tractors during loading at container terminals. Transp. Res. D-TR. E 2017, 53, 17–36. [Google Scholar] [CrossRef]
- Liu, D.; Ge, Y.E. Modeling assignment of quay cranes using queueing theory for minimizing CO2 emission at a container terminal. Transp. Res. D-TR. E 2018, 61, 140–151. [Google Scholar] [CrossRef]
- Hu, X.; Guo, J.; Zhang, Y. Optimal strategies for the yard truck scheduling in container terminal with the consideration of container clusters. Comput. Ind. Eng. 2019, 137, 106083. [Google Scholar] [CrossRef]
- Han, X.L.; Wang, Q.; Huang, J.W. Scheduling cooperative twin automated stacking cranes in automated container terminals. Comput. Ind. Eng. 2019, 128, 553–558. [Google Scholar] [CrossRef]
- Yang, Y.C.; Chang, W.M. Impacts of electric rubber-tired gantries on green port performance. Res. Transp. Bus. Manag. 2013, 8, 67–76. [Google Scholar]
- Berechman, J.; Tseng, P.H. Estimating the environmental costs of port related emissions: The case of Kaohsiung. Transp. Res. D-TR. E 2012, 17, 35–38. [Google Scholar] [CrossRef]
- Gibbs, D.; Rigot-Muller, P.; Mangan, J.; Lalwani, C. The role of sea ports in end-to-end maritime transport chain emissions. Energy Policy 2014, 64, 337–348. [Google Scholar] [CrossRef] [Green Version]
- Sim, J. A carbon emission evaluation model for a container terminal. J. Clean. Prod. 2018, 186, 526–533. [Google Scholar] [CrossRef]
- Chen, G.; Govindan, K.; Golias, M.M. Reducing truck emissions at container terminals in a low carbon economy: Proposal of a queueing-based bi-objective model for optimizing truck arrival pattern. Transp. Res. E-Logist. 2013, 55, 3–22. [Google Scholar] [CrossRef]
- Brown, L.; Gans, N.; Mandelbaum, A.; Sakov, A.; Shen, H.; Zeltyn, S.; Zhao, L. Statistical analysis of a telephone call center: A queueing-science perspective. J. Am. Stat. Assoc. 2005, 100, 36–50. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.H.; Whitt, W. Choosing arrival process models for service systems: Tests of a nonhomogeneous Poisson process. Nav. Res. Log. 2014, 61, 66–90. [Google Scholar] [CrossRef]
- Stewart, W.J. Probability, Markov Chains, Queues, and Simulation: The Mathematical Basis of Performance Modeling; Princeton University Press: Princeton, NJ, USA, 2009; pp. 560–562. [Google Scholar]
- Ji, X.; Zhang, J.; Ran, B.; Ban, X.G. Fluid Approximation of Point-queue Model. Proc.-Soc. Behav. Sci. 2014, 38, 470–481. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.P.; Tipper, D.; Banerjee, S. A simple approximation for modeling nonstationary queues. In Proceedings of the Fifteenth Annual Joint Conference of the IEEE Computer Societies, San Francisco, CA, USA, 24–28 March 1996. [Google Scholar]
- Homayouni, S.M.; Tang, S.H.; Motlagh, O. A genetic algorithm for optimization of integrated scheduling of cranes, vehicles, and storage platforms at automated container terminals. J. Comput. Appl. Math. 2014, 270, 545–556. [Google Scholar] [CrossRef]
- Yang, Y.; Zhong, M.; Dessouky, Y.; Postolache, O. An integrated scheduling method for AGV routing in automated container terminals. Comput. Ind. Eng. 2018, 126, 482–493. [Google Scholar] [CrossRef]
- Skinner, B.; Yuan, S.; Huang, S.; Liu, D.; Cai, B.; Dissanayake, G.; Lau, H.; Bott, A.; Pagac, D. Optimisation for job scheduling at automated container terminals using genetic algorithm. Comput. Ind. Eng. 2013, 64, 511–523. [Google Scholar] [CrossRef]
- Starcrest Consulting Group, LLC. Inventory of Air Emissions for CY 2018; Starcrest Consulting Group, LLC: Port of Los Angeles, CA, USA, 2019. [Google Scholar]
- Li, T. A research of the power-saving unit for the engine with double speed on the shore based container. Port Sci. Technol. 2008, 8, 40–41. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time | CU KS Test | Log KS Test | |||
|---|---|---|---|---|---|
| 14 July 00:00–14 July 18:00 | 256 | 0.1313 | 0.1477 | 0.5864 | 0.0013 |
| 14 July 18:00–15 July 10:00 | 279 | 0.0893 | 0.0338 | 0.1224 | 0.3453 |
| 15 July 10:00–15 July 14:00 | 260 | 0.6514 | 0.2116 | 0.0393 | 0.0414 |
| 15 July 14:00–15 July 18:00 | 239 | 0.1959 | 0.0882 | 0.1418 | 0.0499 |
| 15 July 18:00–16 July 8:00 | 242 | 0.2667 | 0.0000 | 0.0235 | 0.0069 |
| 16 July 8:00–16 July 12:00 | 240 | 0.1226 | 0.0104 | 0.1052 | 0.0034 |
| 16 July 12:00–16 July 18:00 | 259 | 0.1545 | 0.7477 | 0.4571 | 0.7642 |
| 16 July 18:00–16 July 24:00 | 201 | 0.3556 | 0.1693 | 0.0371 | 0.0003 |
| 16 July 24:00–17 July 12:00 | 275 | 0.3341 | 0.6114 | 0.0000 | 0.0533 |
| 17 July 12:00–17 July 16:00 | 257 | 0.2871 | 0.6779 | 0.5132 | 0.2111 |
| 17 July 16:00–17 July 24:00 | 291 | 0.4680 | 0.0142 | 0.0831 | 0.0005 |
| 17 July 24:00–18 July 12:00 | 189 | 0.1157 | 0.1052 | 0.2708 | 0.1346 |
| 18 July 12:00–18 July 16:00 | 409 | 0.0015 | 0.0589 | 0.0871 | 0.0864 |
| 18 July 16:00–18 July 18:00 | 296 | 0.6989 | 0.9450 | 0.0003 | 0.0001 |
| 18 July 18:00–18 July 20:00 | 280 | 0.6393 | 0.8370 | 0.0073 | 0.0027 |
| 18 July 20:00–19 July 8:00 | 196 | 0.6027 | 0.0004 | 0.6730 | 0.2958 |
| 19 July 8:00–19 July 10:00 | 334 | 0.6304 | 0.4638 | 0.0101 | 0.0011 |
| 19 July 10:00–19 July 12:00 | 320 | 0.1582 | 0.0196 | 0.0454 | 0.0576 |
| 19 July 12:00–19 July 14:00 | 270 | 0.8721 | 0.7229 | 0.1451 | 0.0711 |
| 19 July 14:00–19 July 24:00 | 249 | 0.1398 | 0.0347 | 0.2931 | 0.1547 |
| 19 July 24:00–20 July 12:00 | 359 | 0.1922 | 0.0107 | 0.1247 | 0.0481 |
| 20 July 12:00–20 July 16:00 | 305 | 0.5903 | 0.0871 | 0.2279 | 0.5239 |
| 20 July 16:00–21 July 12:00 | 217 | 0.4831 | 0.0394 | 0.1008 | 0.0043 |
| 21 July 12:00–21 July 18:00 | 248 | 0.3520 | 0.4404 | 0.6264 | 0.6919 |
| 21 July 18:00–22 July 8:00 | 209 | 0.1533 | 0.2846 | 0.4561 | 0.0497 |
| 22 July 8:00–22 July 14:00 | 387 | 0.0024 | 0.0058 | 0.5323 | 0.1792 |
| 22 July 14:00–22 July 18:00 | 332 | 0.1614 | 0.0382 | 0.0904 | 0.0764 |
| 22 July 18:00–22 July 24:00 | 274 | 0.0027 | 0.0007 | 0.0679 | 0.4879 |
| 22 July 24:00–23 July 12:00 | 236 | 0.8998 | 0.3438 | 0.2641 | 0.0173 |
| 23 July 12:00–23 July 16:00 | 220 | 0.8784 | 0.8289 | 0.1710 | 0.2525 |
| 23 July 16:00–23 July 20:00 | 271 | 0.1168 | 0.0209 | 0.0891 | 0.0663 |
| 23 July 20:00–24 July 10:00 | 247 | 0.0931 | 0.0042 | 0.2227 | 0.2424 |
| 24 July 10:00–24 July 14:00 | 232 | 0.3408 | 0.0660 | 0.0036 | 0.0074 |
| 24 July 14:00–24 July 18:00 | 368 | 0.9951 | 0.0867 | 0.5613 | 0.1891 |
| 24 July 18:00–25 July 2:00 | 192 | 0.1361 | 0.1686 | 0.0923 | 0.3122 |
| 25 July 2:00–26 July 13:00 | 281 | 0.0000 | 0.0024 | 0.0778 | 0.8467 |
| 26 July 13:00–26 July 15:00 | 316 | 0.9903 | 0.3096 | 0.0190 | 0.0134 |
| 26 July 15:00–26 July 18:00 | 265 | 0.4963 | 0.4893 | 0.4485 | 0.3692 |
| 26 July 18:00–26 July 21:00 | 479 | 0.0669 | 0.1102 | 0.0000 | 0.0000 |
| 26 July 21:00–26 July 23:00 | 277 | 0.2232 | 0.0386 | 0.2257 | 0.2848 |
| 26 July 23:00–27 July 8:00 | 301 | 0.8806 | 0.1596 | 0.0013 | 0.0048 |
| 27 July 8:00–27 July 10:00 | 343 | 0.5620 | 0.5131 | 0.0021 | 0.0029 |
| 27 July 10:00–27 July 12:00 | 245 | 0.2238 | 0.2189 | 0.1113 | 0.1704 |
| 27 July 12:00–27 July 24:00 | 269 | 0.2197 | 0.0403 | 0.2381 | 0.0446 |
| Input Variable | (kg/h) | (kg/h) | (truck/h) | (container/h) | (h) | |||
|---|---|---|---|---|---|---|---|---|
| Value | 5.728 | 15.48 | 59 | 19 | 0.42687 | 6 | 1.4 | 4 |
| Vessel No. | Block No. | Number of Containers Stacked (Natural Container) | ||
|---|---|---|---|---|
| 1 | 21 July 2014 5:00 | 21 July 2014 15:30 | 9 | 100 |
| 2 | 21 July 2014 1:00 | 21 July 2014 10:30 | 1 | 111 |
| 3 | 21 July 2014 10:00 | 21 July 2014 22:30 | 1 | 234 |
| 4 | 21 July 2014 14:30 | 22 July 2014 1:00 | 9 | 159 |
| 5 | 21 July 2014 19:30 | 22 July 2014 9:30 | 14 | 239 |
| 6 | 21 July 2014 21:30 | 22 July 2014 8:30 | 12 | 224 |
| 7 | 21 July 2014 23:30 | 22 July 2014 8:00 | 11 | 86 |
| 8 | 22 July 2014 8:30 | 22 July 2014 23:30 | 7 | 273 |
| 9 | 22 July 2014 9:00 | 23 July 2014 2:00 | 16 | 247 |
| 10 | 22 July 2014 16:00 | 23 July 2014 7:00 | 15 | 135 |
| 16 | 94 | |||
| 11 | 22 July 2014 17:00 | 23 July 2014 13:00 | 2 | 86 |
| 12 | 22 July 2014 23:00 | 23 July 2014 13:00 | 4 | 204 |
| 13 | 23 July 2014 5:30 | 23 July 2014 15:00 | 4 | 107 |
| 14 | 23 July 2014 15:00 | 24 July 2014 7:00 | 12 | 123 |
| 17 | 110 | |||
| 15 | 23 July 2014 17:00 | 24 July 2014 7:30 | 3 | 85 |
| 5 | 65 | |||
| 16 | 23 July 2014 17:00 | 24 July 2014 1:00 | 19 | 77 |
| 17 | 23 July 2014 19:30 | 24 July 2014 7:00 | 10 | 155 |
| 18 | 23 July 2014 22:00 | 24 July 2014 8:00 | 17 | 146 |
| 19 | 24 July 2014 1:00 | 24 July 2014 13:00 | 5 | 92 |
| 20 | 24 July 2014 5:00 | 24 July 2014 17:00 | 11 | 227 |
| 21 | 24 July 2014 13:00 | 25 July 2014 0:00 | 8 | 253 |
| 22 | 24 July 2014 16:30 | 25 July 2014 5:30 | 1 | 94 |
| 23 | 24 July 2014 17:30 | 25 July 2014 5:00 | 18 | 214 |
| 24 | 26 July 2014 19:00 | 27 July 2014 11:00 | 8 | 109 |
| 25 | 27 July 2014 10:30 | 28 July 2014 0:00 | 11 | 157 |
| 16 | 253 | |||
| 26 | 26 July 2014 20:00 | 27 July 2014 6:00 | 6 | 158 |
| 27 | 26 July 2014 21:30 | 27 July 2014 14:00 | 13 | 202 |
| 28 | 26 July 2014 20:30 | 27 July 2014 9:30 | 11 | 171 |
| 29 | 26 July 2014 21:00 | 27 July 2014 9:30 | 17 | 233 |
| 30 | 26 July 2014 22:30 | 27 July 2014 12:30 | 10 | 149 |
| 31 | 26 July 2014 22:30 | 27 July 2014 12:30 | 14 | 60 |
| 32 | 27 July 2014 8:30 | 28 July 2014 0:00 | 3 | 44 |
| 9 | 157 | |||
| 33 | 27 July 2014 6:00 | 28 July 2014 0:00 | 4 | 169 |
| 34 | 27 July 2014 10:00 | 28 July 2014 0:00 | 7 | 127 |
| 35 | 27 July 2014 12:30 | 27 July 2014 22:00 | 14 | 105 |
| 36 | 27 July 2014 13:00 | 28 July 2014 3:00 | 10 | 155 |
| 13 | 130 | |||
| 37 | 27 July 2014 18:30 | 28 July 2014 8:00 | 15 | 76 |
| 38 | 27 July 2014 19:00 | 28 July 2014 6:00 | 2 | 132 |
| 39 | 27 July 2014 20:00 | 28 July 2014 10:00 | 1 | 160 |
| 3 | 127 | |||
| 40 | 27 July 2014 21:30 | 28 July 2014 6:00 | 4 | 78 |
| 41 | 27 July 2014 22:00 | 28 July 2014 12:30 | 16 | 180 |
| 18 | 197 | |||
| 42 | 27 July 2014 22:30 | 28 July 2014 13:30 | 16 | 80 |
| 43 | 27 July 2014 23:30 | 28 July 2014 14:30 | 2 | 53 |
| 44 | 27 July 2014 23:30 | 28 July 2014 10:00 | 9 | 110 |
| Block No. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| Maximum storage capacity | 500 | 500 | 500 | 500 | 500 | 500 | 500 | 500 | 500 | 550 |
| Block No. | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | |
| Maximum storage capacity | 550 | 550 | 550 | 550 | 520 | 520 | 520 | 520 | 300 |
| No. | Crossover Probability | Mutation Probability | Average Results |
|---|---|---|---|
| 1 | 0.6 | 0.1 | 7887.253 |
| 2 | 0.6 | 0.2 | 7858.244 |
| 3 | 0.6 | 0.3 | 7791.335 |
| 4 | 0.7 | 0.1 | 7843.657 |
| 5 | 0.7 | 0.2 | 7845.88 |
| 6 | 0.7 | 0.3 | 7791.428 |
| 7 | 0.8 | 0.1 | 7822.194 |
| 8 | 0.8 | 0.2 | 7807.571 |
| 9 | 0.8 | 0.3 | 7802.982 |
| 10 | 0.9 | 0.1 | 7852.937 |
| 11 | 0.9 | 0.2 | 7817.444 |
| 12 | 0.9 | 0.3 | 7837.182 |
| Scenario No. | Number of RTGCs Deployed to Each Block | The Maximum Length of Time Window | The Total Carbon Dioxide Emissions (kg) | The Carbon Dioxide Emissions of Trucks at Gate (kg) | The Carbon Dioxide Emissions of Trucks at Yard (kg) | The Carbon Dioxide Emissions of RTGCs (kg) |
|---|---|---|---|---|---|---|
| 1 | 1 | 8 | 55,361.43 | 1926.07 | 51,819.58 | 1615.78 |
| 2 | 1 | 12 | 18,913.05 | 576.57 | 16,224.77 | 2111.71 |
| 3 | 1 | 18 | 8751.04 | 488.79 | 5646.06 | 2616.19 |
| 4 | 1 | 24 | 8599.837 | 470.17 | 5053.67 | 3075.9974 |
| 5 | 1 | 36 | 8593.95 | 461.38 | 4494.95 | 3637.62 |
| 6 | 1 | 48 | 8333.68 | 457.51 | 4059.66 | 3816.51 |
| 7 | 2 | 8 | 76,642.46 | 622.4 | 74,139.15 | 1880.91 |
| 8 | 2 | 12 | 45,763.35 | 613.37 | 42,331.9 | 2818.08 |
| 9 | 2 | 18 | 24,638.44 | 606.88 | 19,184.19 | 4847.37 |
| 10 | 2 | 24 | 21,694.44 | 610.5 | 14,458.02 | 6625.92 |
| 11 | 2 | 36 | 23,846.06 | 606.42 | 13,031.59 | 10,208.05 |
| 12 | 2 | 48 | 23,802.27 | 604.68 | 12,930.64 | 10,266.95 |
| Scenario No. | Number of RTGCs Deployed to Each Block | The Maximum Length of Time Window | The Maximum of Containers Waiting in the Queue at Each Block | The Total CO2 Emissions (kg) | The CO2 Emissions of Trucks at Gate (kg) | The CO2 Emissions of Trucks at Yard (kg) | The CO2 Emissions of RTGCs (kg) |
|---|---|---|---|---|---|---|---|
| 1 | 1 | 18 | 7 | 9008.47 | 491.44 | 5778.03 | 2739 |
| 2 | 1 | 18 | 8 | 9093.25 | 500.48 | 5836.82 | 2755.95 |
| 3 | 1 | 18 | 9 | 9174.19 | 496.62 | 6049.63 | 2627.94 |
| 4 | 1 | 18 | 10 | 9435.02 | 505.43 | 6324.61 | 2604.98 |
| 5 | 1 | 24 | 3 | 10264.66 | 530.82 | 4659.6 | 5074.24 |
| 6 | 1 | 24 | 4 | 8561.13 | 472.07 | 5202.56 | 2886.5 |
| 7 | 1 | 24 | 5 | 9038.74 | 483.44 | 5747.72 | 2807.58 |
| 8 | 1 | 24 | 6 | 9100.43 | 478.14 | 6019.02 | 2603.27 |
| 9 | 1 | 36 | 2 | 8433.52 | 470.53 | 4258.9 | 3704.09 |
| 10 | 1 | 36 | 3 | 8593.95 | 461.38 | 4494.95 | 3637.62 |
| 11 | 1 | 36 | 4 | 8710.17 | 461.48 | 4997.84 | 3250.85 |
| 12 | 1 | 36 | 5 | 8411.766 | 464.056 | 5049.13 | 2898.58 |
| 13 | 1 | 48 | 2 | 8333.68 | 457.51 | 4059.66 | 3816.51 |
| 14 | 1 | 48 | 3 | 8920.38 | 455.39 | 5280.41 | 3184.58 |
| 15 | 1 | 48 | 4 | 8826.11 | 459.6 | 5400.46 | 2966.05 |
| 16 | 1 | 48 | 5 | 8848.025 | 465.87 | 5524.035 | 2858.12 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, M.; Fan, H.; Jiang, X.; Guo, Z. Truck Arrivals Scheduling with Vessel Dependent Time Windows to Reduce Carbon Emissions. Sustainability 2019, 11, 6410. https://doi.org/10.3390/su11226410
Ma M, Fan H, Jiang X, Guo Z. Truck Arrivals Scheduling with Vessel Dependent Time Windows to Reduce Carbon Emissions. Sustainability. 2019; 11(22):6410. https://doi.org/10.3390/su11226410
Chicago/Turabian StyleMa, Mengzhi, Houming Fan, Xiaodan Jiang, and Zhenfeng Guo. 2019. "Truck Arrivals Scheduling with Vessel Dependent Time Windows to Reduce Carbon Emissions" Sustainability 11, no. 22: 6410. https://doi.org/10.3390/su11226410
APA StyleMa, M., Fan, H., Jiang, X., & Guo, Z. (2019). Truck Arrivals Scheduling with Vessel Dependent Time Windows to Reduce Carbon Emissions. Sustainability, 11(22), 6410. https://doi.org/10.3390/su11226410