Joint Configuration and Scheduling Optimization of a Dual-Trolley Quay Crane and Automatic Guided Vehicles with Consideration of Vessel Stability

Abstract
:1. Introduction
2. Problem Description and Mathematical Model
2.1. Problem Description
2.2. Phase I: Mathematical Formulation for Configuration and Scheduling of a Dual-Trolley Quay Crane
2.3. Phase II: Mathematical Formulation for AGV Scheduling
3. Algorithms
3.1. Enumeration Algorithm for Solving the First Phase Model
3.2. Extended Genetic Algorithm for Solving the Second Phase Model
4. Case Studies
4.1. Experimental Setting
4.2. Optimization Results
4.2.1. The Results of Quay Crane Scheduling and Configuration in the First Phase
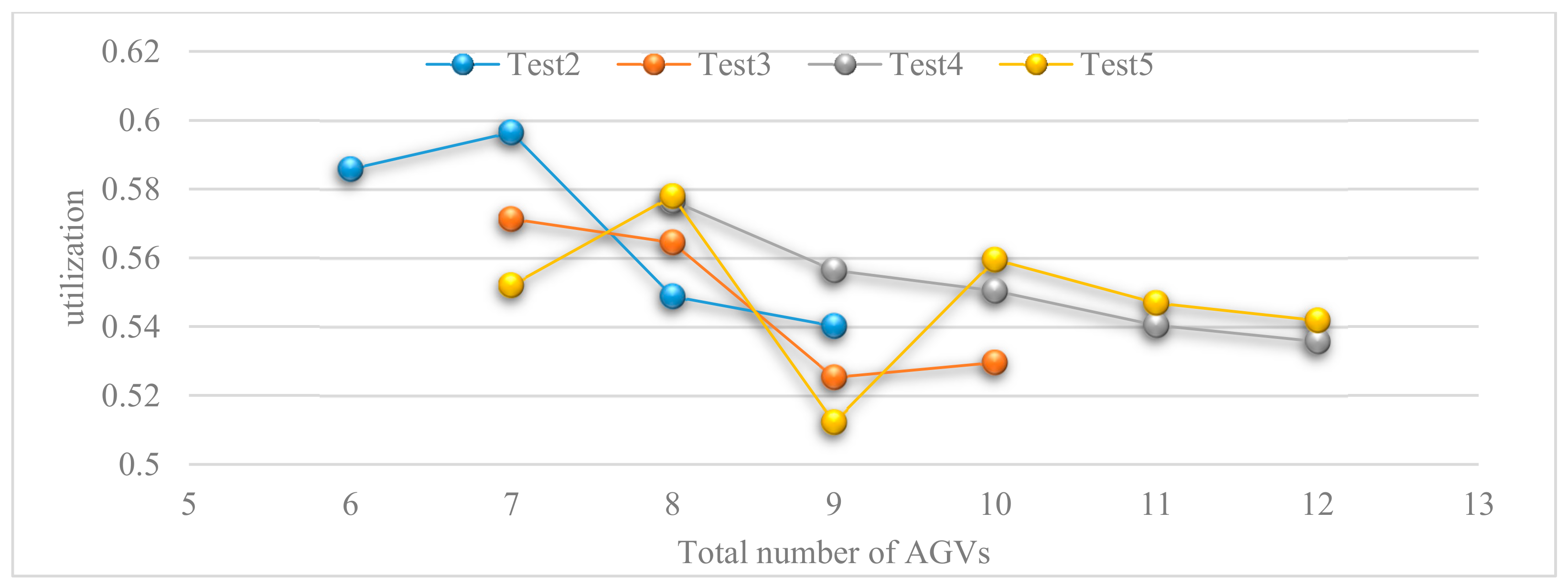
4.2.2. The Results of AGV Scheduling and Configuration in the Second Phase
5. Conclusions
- (1)
- A two-phase mixed integer programming model is proposed. The enumeration algorithm is developed to solve the quay crane scheduling, and the genetic algorithm is improved to obtain the AGV scheduling, in order to complete the loading and discharging operations of all containers on the ship and maintain the stability of the ship in laytime.
- (2)
- The available laytime has an impact on the configured number of quay cranes. The shorter the laytime, the more the quay cranes are configured, and the more total energy consumption of the handling operations. The stability has an impact on the movement sequence of the quay cranes. The order of operations can be changed to reduce the wait time of the quayside and keep the ship stable.
- (3)
- The single ship’s operation and scheduling mode has been studied by converting the buffer platform of the dual-trolley quay crane and the buffer bracket of block constraints into time window constraints. According to the results of this experiment, it was found that the ratio of quay cranes and AGVs after optimization is about 1:2, which is higher than the optimal ratio 1:3 obtained by a simulation in the study by [29]. Regardless of the influence of an uncertain environment and other factors, in case 5, the configuration ratio of quay cranes and AGV was 1:1.75, without delay of the main trolley. However, because of the energy consumption caused by the waiting of quay cranes and yard cranes, the energy consumption of the handling operation could not be lowest.
Author Contributions
Funding
Conflicts of Interest
References
- Sim, J. A carbon emission evaluation model for a container terminal. J. Clean. Prod. 2018, 186, 526–533. [Google Scholar] [CrossRef]
- He, J.; Huang, Y.; Yan, W. Yard crane scheduling in a container terminal for the trade-off between efficiency and energy consumption. Adv. Eng. Inf. 2015, 29, 59–75. [Google Scholar] [CrossRef]
- Chang, D.; He, J.; Bian, Z. An investigation into berth and quay crane scheduling for container terminals based on knowledge. In Proceedings of the 2010 International Conference on Future Information Technology and Management Engineering, Changzhou, China, 9 October 2010; pp. 63–66. [Google Scholar]
- He, J. Berth allocation and quay crane assignment in a container terminal for the trade-off between time-saving and energy-saving. Adv. Eng. Inf. 2016, 30, 390–405. [Google Scholar] [CrossRef]
- Chang, D.; Fang, T.; Fan, Y. Dynamic rolling strategy for multi-vessel quay crane scheduling. Adv. Eng. Inf. 2017, 34, 60–69. [Google Scholar] [CrossRef]
- Kovalyov, M.Y.; Pesch, E.; Ryzhikov, A. A note on scheduling container storage operations of two non-passing stacking cranes. Networks 2018, 71, 271–280. [Google Scholar] [CrossRef]
- Liu, D.; Ge, Y.E. Modeling assignment of quay cranes using queueing theory for minimizing CO2 emission at a container terminal. Transp. Res. Part D Transp. Environ. 2018, 61, 140–151. [Google Scholar] [CrossRef]
- Liang, C.; Fan, L.; Xu, D.; Ding, Y.; Gen, M. Research on coupling scheduling of quay crane dispatch and configuration in the container terminal. Comput. Ind. Eng. 2018, 125, 649–657. [Google Scholar] [CrossRef]
- Msakni, M.K.; Diabat, A.; Rabadi, G.; Al-Salem, M.; Kotachi, M. Exact methods for the quay crane scheduling problem when tasks are modeled at the single container level. Comput. Oper. Res. 2018, 99, 218–233. [Google Scholar] [CrossRef]
- Kim, K.H.; Park, Y.M. A crane scheduling method for port container terminals. Eur. J. Oper. Res. 2004, 156, 752–768. [Google Scholar] [CrossRef]
- Nguyen, S.; Zhang, M.; Johnston, M.; Tan, K.C. Hybrid evolutionary computation methods for quay crane scheduling problems. Comput. Oper. Res. 2013, 40, 2083–2093. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, M.; Lee, C.Y.; Wang, J. The quay crane scheduling problem with stability constraints. IEEE Trans. Autom. Sci. Eng. 2018, 15, 1399–1412. [Google Scholar] [CrossRef]
- Al-Dhaheri, N.; Diabat, A. A Lagrangian relaxation-based heuristic for the multi-ship quay crane scheduling problem with ship stability constraints. Ann. Oper. Res. 2017, 248, 1–24. [Google Scholar] [CrossRef]
- Kim, K.H.; Bae, J.W. A look-ahead dispatching method for automated guided vehicles in automated port container terminals. Transp. Sci. 2004, 38, 224–234. [Google Scholar] [CrossRef]
- Choe, R.; Kim, J.; Ryu, K.R. Online preference learning for adaptive dispatching of AGVs in an automated container terminal. Appl. Soft Comput. 2016, 38, 647–660. [Google Scholar] [CrossRef]
- Kim, J.; Choe, R.; Ryu, K.R. Multi-objective optimization of dispatching strategies for situation-adaptive AGV operation in an automated container terminal. In Proceedings of the 2013 Research in Adaptive and Convergent Systems, Montreal, QC, Canada, 1–4 October 2013. [Google Scholar]
- Singgih, I.K.; Hong, S.; Kim, K.H. Flow Path Design for Automated Transport Systems in Container Terminals Considering Traffic Congestion. Ind. Eng. Manag. Syst. 2016, 15, 19–31. [Google Scholar] [CrossRef]
- Legato, P.; Mazza, R.M.; Trunfio, R. Simulation-based optimization for discharging/loading operations at a maritime container terminal. OR Spectrum 2010, 32, 543–567. [Google Scholar] [CrossRef]
- Xin, J.; Negenborn, R.R.; Lodewijks, G. Energy-aware control for automated container terminals using integrated flow shop scheduling and optimal control. Transp. Res. Part C Emerg. Technol. 2014, 44, 214–230. [Google Scholar] [CrossRef]
- Peng, Y.; Wang, W.; Liu, K.; Li, X.; Tian, Q. The Impact of the allocation of facilities on reducing carbon emissions from a green container terminal perspective. Sustainability 2018, 10, 1813. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Zhu, X.; Haghani, A. multiple equipment integrated scheduling and storage space allocation in rail–Water intermodal container terminals considering energy efficiency. Transp. Res. Rec. 2019, 2673, 199–209. [Google Scholar] [CrossRef]
- Dkhil, H.; Yassine, A.; Chabchoub, H. Optimization of container handling systems in automated maritime terminal. In Advanced Methods for Computational Collective Intelligence; Springer: Berlin/Heidelberg, Germany, 2013; pp. 301–312. [Google Scholar]
- Yang, Y.; Zhong, M.; Dessouky, Y.; Postolache, O. An integrated scheduling method for AGV routing in automated container terminals. Comput. Ind. Eng. 2018, 126, 482–493. [Google Scholar] [CrossRef]
- Xin, J.; Negenborn, R.R.; Corman, F.; Lodewijks, G. Control of interacting machines in automated container terminals using a sequential planning approach for collision avoidance. Transp. Res. Part C Emerg. Technol. 2015, 60, 377–396. [Google Scholar] [CrossRef]
- Lee, D.H.; Wang, H.Q.; Miao, L. Quay crane scheduling with non-interference constraints in port container terminals. Transp. Res. Part E Logist. Transp. Rev. 2008, 44, 124–135. [Google Scholar] [CrossRef]
- Baldi, M.M.; Perboli, G.; Tadei, R. The three-dimensional knapsack problem with balancing constraints. Appl. Math. Comput. 2012, 218, 9802–9818. [Google Scholar] [CrossRef] [Green Version]
- Luo, X. Comparison of horizon transportation system of full automatic container terminal. Port Waterw. Eng. 2016, 9, 76–82. [Google Scholar]
- Chen, C.; Zhang, Z.; Zeng, Q.C. Integrated scheduling model of mixed cross-operation for container terminal. J. Traffic Transp. Eng. 2012, 3, 92–100. [Google Scholar]
- Han, X.; Fan, J. Analysis of AGV dispatching and configuration simulation of automated container terminals. J. Chongqing Jiaotong Univ. 2016, 35, 151–154, 164. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sets | ||
| represents the set of all tasks, indexed by , where is a loading/discharging operation of the same bay on the deck or hold | ||
| represents the set of all containers, indexed by | ||
| represents the set of all QCs, indexed by | ||
| represents the set of time units, indexed by | ||
| Parameters | ||
| safety margin between two consecutive cranes (in number of bays) | ||
| available laytime of the ship | ||
| center gravity of the ship before starting the operations | ||
| workload before starting the operations in task | ||
| handled workload at time segment in task | ||
| maximum allowable shift with the center gravity of the ship (in number of bays) | ||
| 1 for loading operations; -1 for discharging operations | ||
| weight of task at time segment | ||
| the time required for QCs to move a bay in the direction of the ship | ||
| the average time required for the QCs to pick up and release a container | ||
| c1 | unit time energy consumption for QC loading and discharging | |
| c2 | unit time energy consumption for QC moving | |
| c3 | unit energy consumption for QC waiting | |
| workload in number of containers at tasks | ||
| location of task (in ship-bay number) | ||
| the time that the QC needs to waiting before starting the task after the completed task | ||
| Decision variables | ||
| if QC performs task at time segment | ||
| Otherwise | ||
| If QC performs task after performing task | ||
| Otherwise | ||
| Sets | ||
| L | represents the set of loaded containers | |
| D | represents the set of discharged containers | |
| C | represents the set of yard cranes(YCs), indexed by c | |
| A | represents the set of AGVs, indexed by a | |
| Parameters: | ||
| planned handling time of the nth container by main trolley of quay crane k | ||
| planned handling time of the nth container by gantry trolley of quay crane k | ||
| planned handling time of the nth container by the yard crane c | ||
| earliest starting time of quay crane k for container n | ||
| latest starting time of quay crane k for container n | ||
| earliest starting time of yard crane c for container n | ||
| latest starting time of yard crane c for container n | ||
| C4 | unit time waiting energy consumption for gantry trolley of QC | |
| C5 | unit time energy consumption for AGV convey containers. | |
| C6 | unit time moving energy consumption for no-load AGV | |
| C7 | unit time waiting energy consumption for AGV | |
| size of transit platform of on dual-trolley quay crane | ||
| size of buffer bracket in each block | ||
| the time required for QC to pick up/put down a container | ||
| the time required for yard crane to pick up/put down a container | ||
| the time required for AGV to make a round trip to the charging station | ||
| speed of load AGV | ||
| speed of no-load AGV | ||
| actual handling time of the nth container by main trolley of quay crane k | ||
| actual handling time of the nth container by gantry trolley of quay crane k | ||
| Decision variables | ||
| if container n is assigned by the ath AGV. | ||
| Otherwise | ||
| if th AGV performs container after performing container | ||
| Otherwise | ||
| if th AGV’s power is less than the safe power after performing container | ||
| Otherwise | ||
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| 1 | 91.24 | ||
| 2 | 70.18 | ||
| 1 | 49.6 | ||
| 3 | 49.6 | ||
| 5 | 21 | ||
| 210 | 14 | ||
| 350 | 9 |
| Text | Principle 1 | Principle 2 | Principle 3 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 48 | / | 2 | / | / | / | / | / | / | / | / |
| 2 | 44 | 42.95 | 3 | 10,024.4 | 13226.8 | 7 | 3202.4 | 6 | 3269.8 | 9 | 3548.8 |
| 3 | 40 | 38.60 | 3 | 10,058.2 | 13377.6 | 7 | 3319.4 | 7 | 3319.4 | 9 | 3594.5 |
| 4 | 36 | 34.11 | 4 | 10,180.9 | 13450.3 | 8 | 3269.4 | 8 | 3269.4 | 12 | 3515.8 |
| 5 | 32 | 31.53 | 4 | 10,180.9 | 13429.8 | 8 | 3248.9 | 7 | 3414.2 | 12 | 3459.6 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yue, L.; Fan, H.; Zhai, C. Joint Configuration and Scheduling Optimization of a Dual-Trolley Quay Crane and Automatic Guided Vehicles with Consideration of Vessel Stability. Sustainability 2020, 12, 24. https://doi.org/10.3390/su12010024
Yue L, Fan H, Zhai C. Joint Configuration and Scheduling Optimization of a Dual-Trolley Quay Crane and Automatic Guided Vehicles with Consideration of Vessel Stability. Sustainability. 2020; 12(1):24. https://doi.org/10.3390/su12010024
Chicago/Turabian StyleYue, Lijun, Houming Fan, and Chunxin Zhai. 2020. "Joint Configuration and Scheduling Optimization of a Dual-Trolley Quay Crane and Automatic Guided Vehicles with Consideration of Vessel Stability" Sustainability 12, no. 1: 24. https://doi.org/10.3390/su12010024
APA StyleYue, L., Fan, H., & Zhai, C. (2020). Joint Configuration and Scheduling Optimization of a Dual-Trolley Quay Crane and Automatic Guided Vehicles with Consideration of Vessel Stability. Sustainability, 12(1), 24. https://doi.org/10.3390/su12010024