4.2. Calculation Results
Failure occurrence rate is the probability that the component experiences a failure during T, necessarily for the first time, given no failure at time zero [
36] (p. 2.8). Based on the accident data mentioned above, the failure occurrence rate
is calculated by the number of collisions
and the time of accident occurrence [
38]. The result of the occurrence rate of slight, general, and serious accident is shown in
Table 4 based on Equation (10).
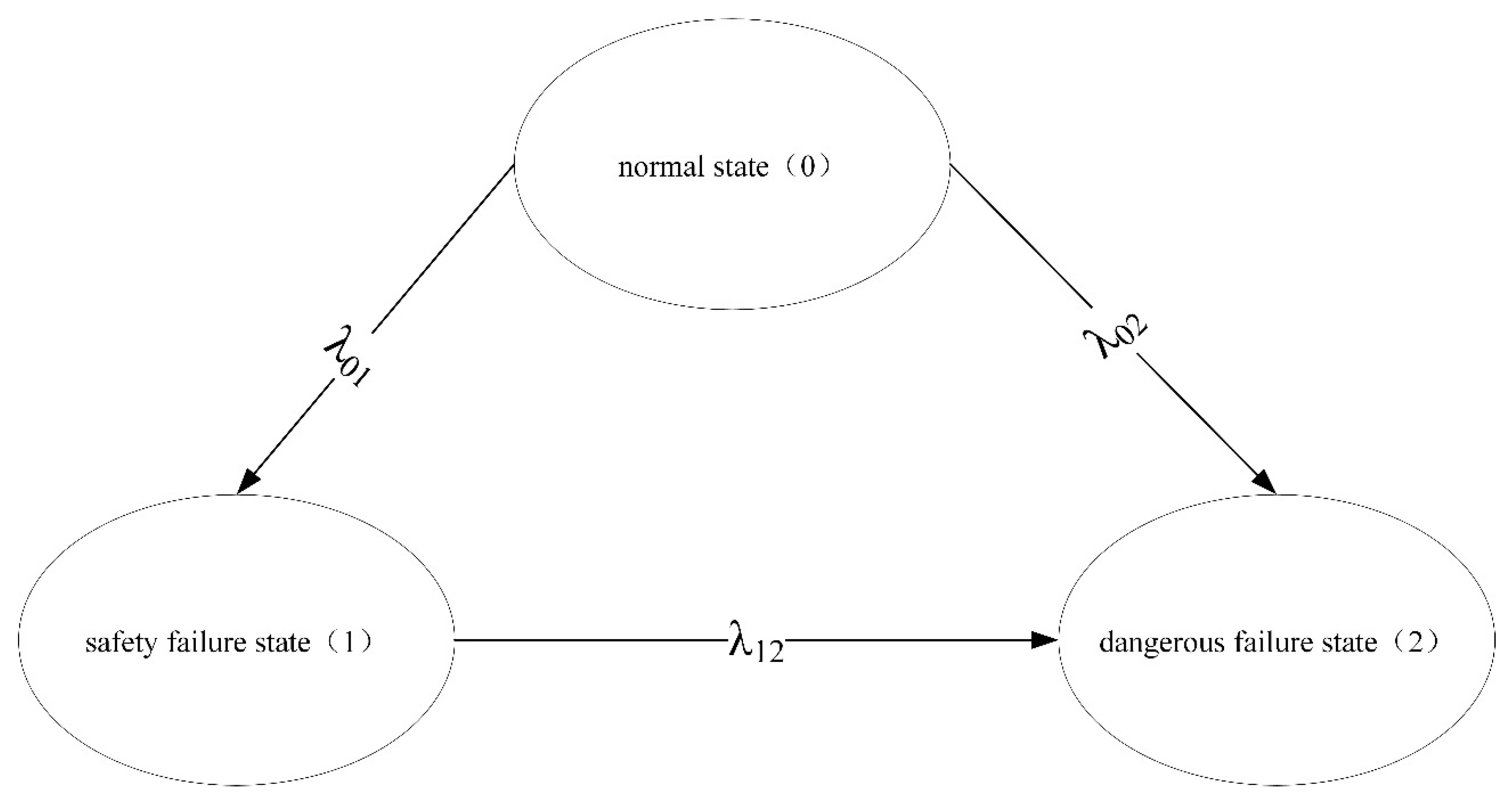
According to Equations (6) and (7), for one hour as a unit time, the initial system state transition matrix is:
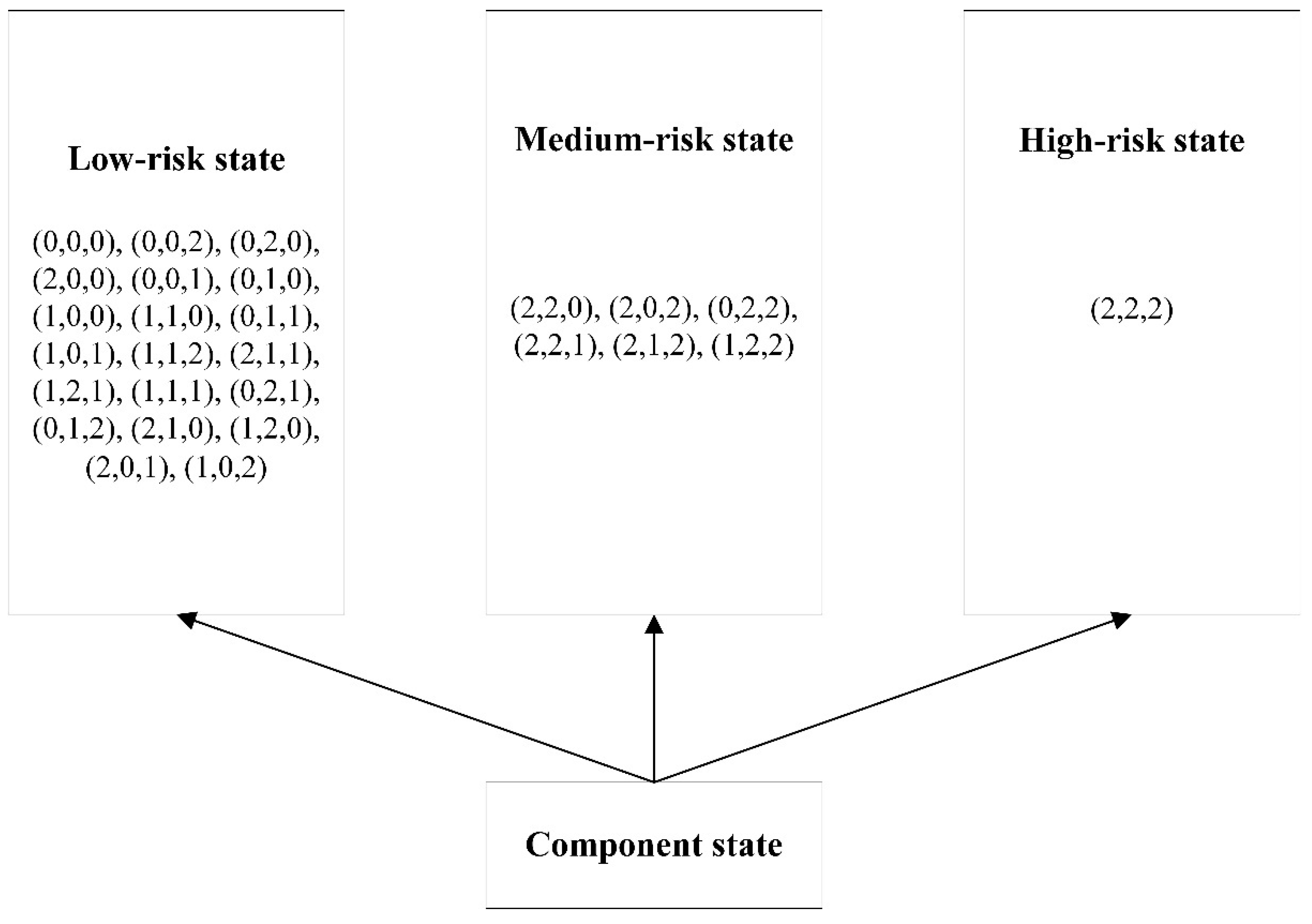
Assuming the system risk state
at the initial time is in medium-risk state, the system risk state was calculated based on the system state transition matrix. The change of probability of the system in low, medium, and high-risk state during
hours after the system starts to operate from the current risk state is shown in
Figure 6. From the obtained results, it is obvious that the probability of high-risk state increases and the probability of medium-risk state decreases with the passage of time.
In order to ensure safety, the system operation requires to avoid reaching the high-risk state or keep the probability of being in the high-risk state as low as possible. So, the high-risk state is a state that needs to be focused on. The arrival time of high-risk state refers to the time when the system reaches high-risk state. Scientific and reasonable estimation of it can guide vessel operators to take control measures in time, reducing accidents, and ensuring system safety. This approach is suitable and expedient to estimate the time when the high-risk state reaches the unacceptable level, and the time when the system transfers to the high-risk state.
In order to assess the system risk, appropriate risk acceptance criteria should be established [
39]. The maximum tolerable risk for crew members is set as
annually. For passengers, the criterion is stricter and about
[
33]. Vanem [
39] proposed individual risk acceptance criteria for LNG crew to be
in concurrence to the As Low As Reasonably Practicable (ALARP) principle. In this study, due to the larger effect of crew members over the risk and the in-time information sharing of the risk, the unacceptable probability of high-risk state is set as
. The time t for the system to reach the unacceptable probability of high-risk state can be obtained.
In addition, to see the change of probability of medium and high-risk state, the time to reach the
can be employed as depiction to ship owner that if actions are not been taken in time, the probability of reaching high-risk state will increase and accidents will occur ultimately. The results in
Table 5 show that the time corresponding to the unacceptable probability of the system is
hours, after the system starts to operate from the current medium-risk state.
In the same way, assume the system risk state
at the initial time is in low-risk state. The change of probability of the system in low, medium, and high-risk state during
hours after the system starts to operate from the low-risk state is shown in
Figure 7.
The results in
Table 6 show that the time corresponding to the unacceptable probability of the system is
hours after the system starts to operate from the current low-risk state.
When the current maritime system is in the low-risk state, the probability of high-risk state will reach after operating the ship for 4 hours. Similarly, if the current maritime system is in the medium-risk state, more attention should be paid to take actions as it will escalate to high risk in one hour. In order to provide control options to shipowners and ship crew for improving safety, this study analyzed the factors that are related to the system reliability and risk and hence highlighted accident causes.
4.3. System Reliability
From the results of the time to reach unacceptable probability of low, medium, and high-risk state in
Section 4.2, the change of probability of the system state can be seen. Moreover, the safety of inland water transportation system
is related to various factors. According to
Section 3.1.2, human subsystem S1 is composed of five components, ship subsystem
is composed of three components, while the environment subsystem
is composed of four components. Due to the different failure modes and failure occurrence rate of these parameters, the reliability and risk fluctuation of different subsystem are analyzed in this section.
Reliability is the probability that the component experiences no failure during the time interval (0, t), given that the component was as good as new at time zero. Reliability is sometimes also called probability of survival [
36] (p. 2.10). Based on the accident data mentioned in
Section 4.1, the failure occurrence rate is calculated by the number of occurrence and the time of accident occurrence. According to Equation (10), the system failure mode and failure occurrence rate can be obtained in
Table 7.
According to the definition in
Section 3.2.2, the component
of human subsystem
having reliability functions as:
From the above, the element of Management having reliability functions as ;;.
For the same reason, the element of Sailor having reliability functions as ;;.
The element of Navigation rules having reliability functions as ;
The element of Watch having reliability functions as ;
The element of Danger recognition and measures having reliability functions as ;
Taking the human subsystem as an example: The reliability function of human subsystem
is defined according to Equation (3):
The risk function of the system is:
From the above equation, we can get the reliability function of human subsystem as
For the same reason, the reliability function of ship system
is:
Furthermore, the reliability function of environment system
is:
The graph of the human, ship, and environment subsystem reliability and risk function are shown in
Figure 8. From results of the three subsystems, the relationship between the system reliability and the accident occurrence rate can be seen. With regards to the failure, the ship owner’s responsibilities and crew duties including low quality of sailor, violation of the navigation rules, negligence of watch, and improper situation or risk recognition and delayed action and control measures have a higher occurrence rate and effect than the ship and environment factors. In
Figure 8a, the reliability of human subsystem decreased much faster than environment and ship subsystem. In addition, the bad visibility and the ship density in navigation environment have a high occurrence rate and influence in the accident causation.
Figure 8c shows the importance of the environment subsystem with respect to the appearance of failure mode 2. For failure mode 3, management and sailor have a higher failure rate than the equipment factor.
Figure 8e shows that the reliability of human subsystem descends to a larger extent than the ship subsystem.
With regard to the risk function, the risk of the ship system increased slower, as the failure rate of vessel age, equipment, and stability have a low frequency of occurrence. As a result, more attention should be paid to human and environment subsystems. It is meaningful to analyze the causes of accident in the safety analysis and assessment of maritime transportation system based on the real-time data from accident reports. The most prominent contribution of this study is that it lists some methods aimed at the control of some prominent causes of accidents, hence providing means to control the maritime transportation system risk.
The results show that one of the main reasons for accident is the lack of crew’s sense of responsibility, which highlighted the importance of the strategy of training of the crews aimed at risk reduction. It is vital to check the qualification of crew and increase the awareness of the importance to obey the international conventions. Referring to the delayed action and measures and the improper danger recognition, if these issues and flaws are rectified, it can certainly reduce the losses of accident and save more people. Strengthening the crew training and enabling and preparing them to take effective and timely actions to sudden and rare severe weather environments or unsatisfactory condition of ship equipment are the key factors in human system resilience.
Even though the ship equipment shortage and failure have low occurrence, more attention should be paid to keep the ship in good stability. Furthermore, much more importance must be given to safety equipment, especially lifeboats, fire extinguishers, and so on, which certainly enhance the chances of survival for those onboard.
As the environmental factors like visibility and navigation environment have a higher influence on the reliability of the system, the local government shall record the geographical condition and mark the dangerous points on the map to provide guidance for ships on prominent and busy channels. Ships can get these records from government or associated organizations to make decisions when the shipping conditions are complicated.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}