SRide: An Online System for Multi-Hop Ridesharing




Abstract
:1. Introduction
2. Background
2.1. Basic Ridesharing Terminology
2.2. Related Work
2.2.1. Multi-Hop Ridesharing
2.2.2. Dynamic Single-Source Shortest-Path Algorithms
2.3. Research Contributions
2.4. Multi-Hop Ridesharing: Problem Definition
3. Development of SRide
3.1. Incremental/Decremental Approach to Multi-Hop Ridesharing
3.2. Details of the Underlying Algorithms
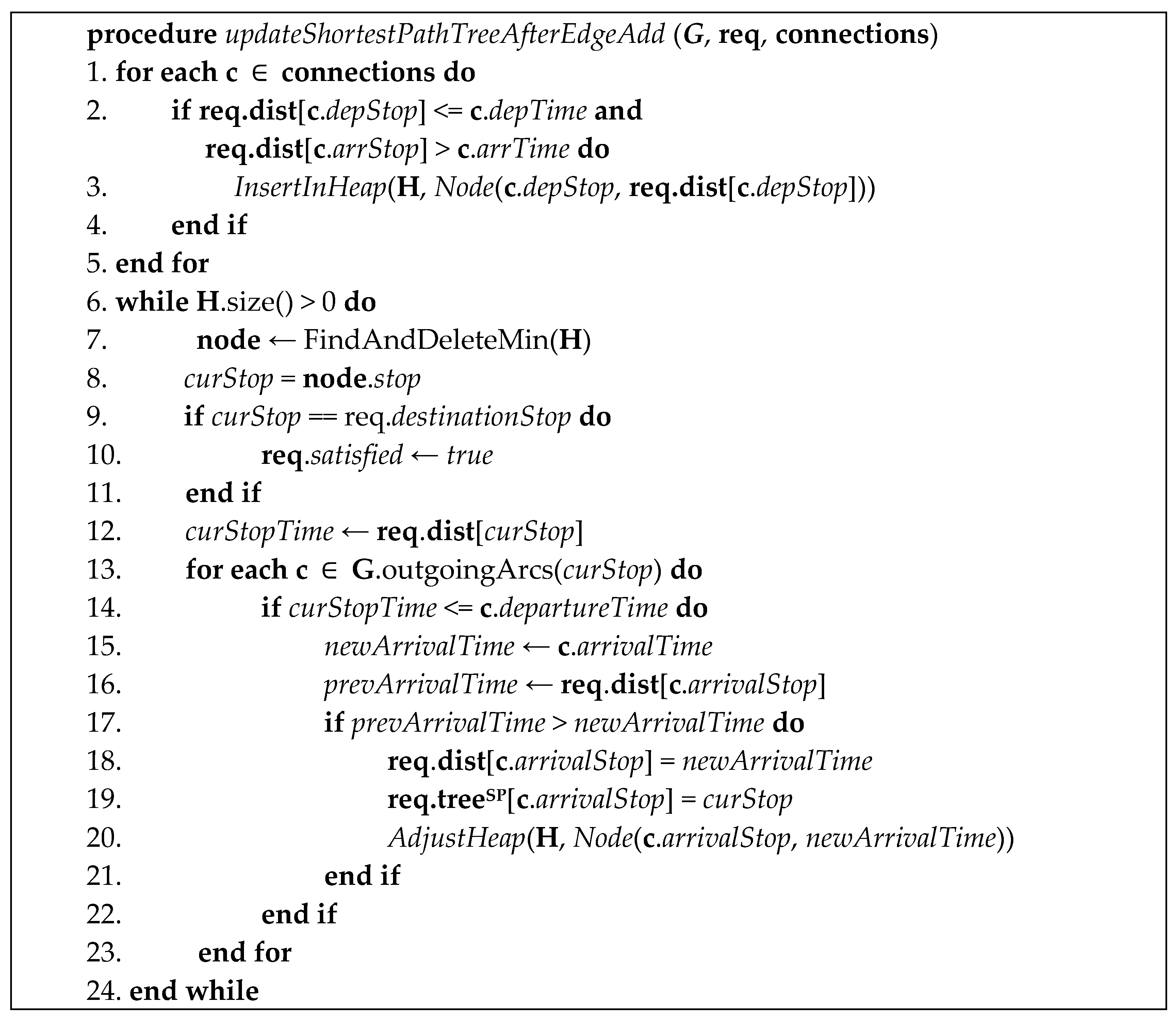
3.2.1. Data Structures
- size(): returns the number of elements in heap H;
- FindAndDeleteMin(): returns the item in heap H with minimum key and deletes it from H;
- InsertInHeap(u, k): inserts an item u with key k into heap H (In the pseudo-code below, a node object is inserted and u and k are the attributes of the node object);
- AdjustHeap(u, k): if uH, it changes the key of element u in heap H to k and updates H. Otherwise, u is inserted into H.
3.2.2. Adding Ride Requests
3.2.3. Adding Ride Offers
3.2.4. Removing Ride Offers
3.2.5. Removing Ride Requests
4. Performance Evaluation
4.1. Simulation Study 1
4.1.1. Generation of Random Data
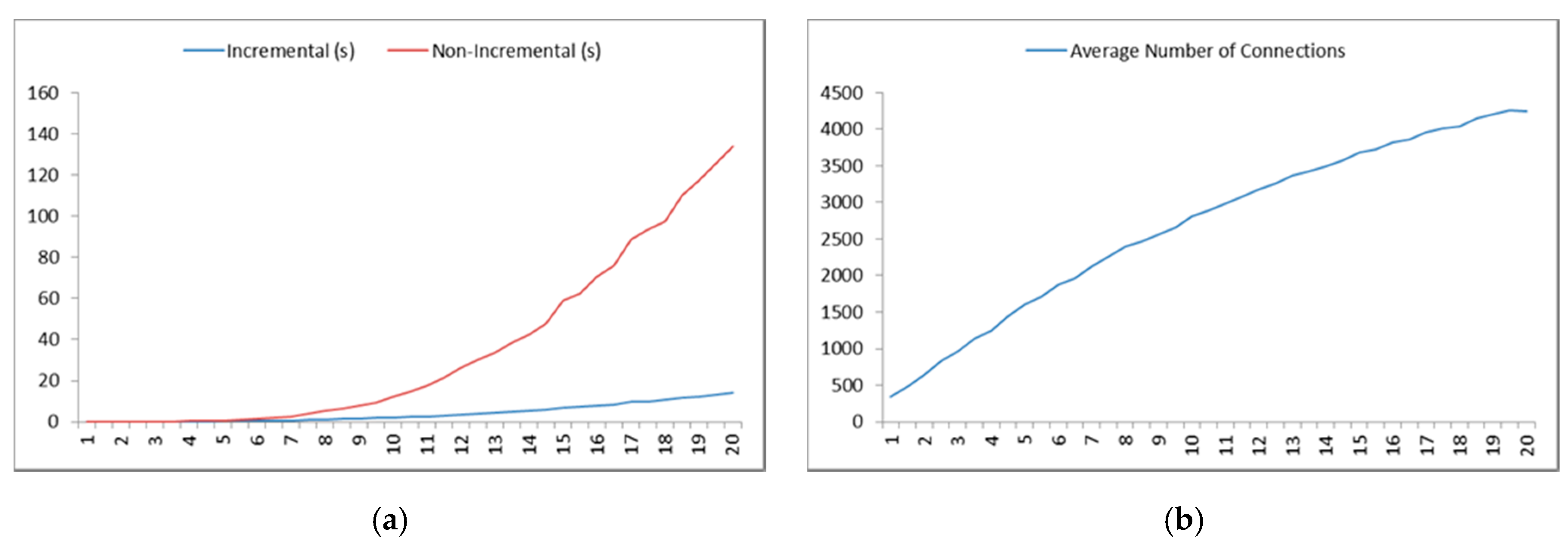
4.1.2. Overall Execution Time
4.1.3. Execution Time of Trip Addition and Removal Operations
4.2. Simulation Study 2
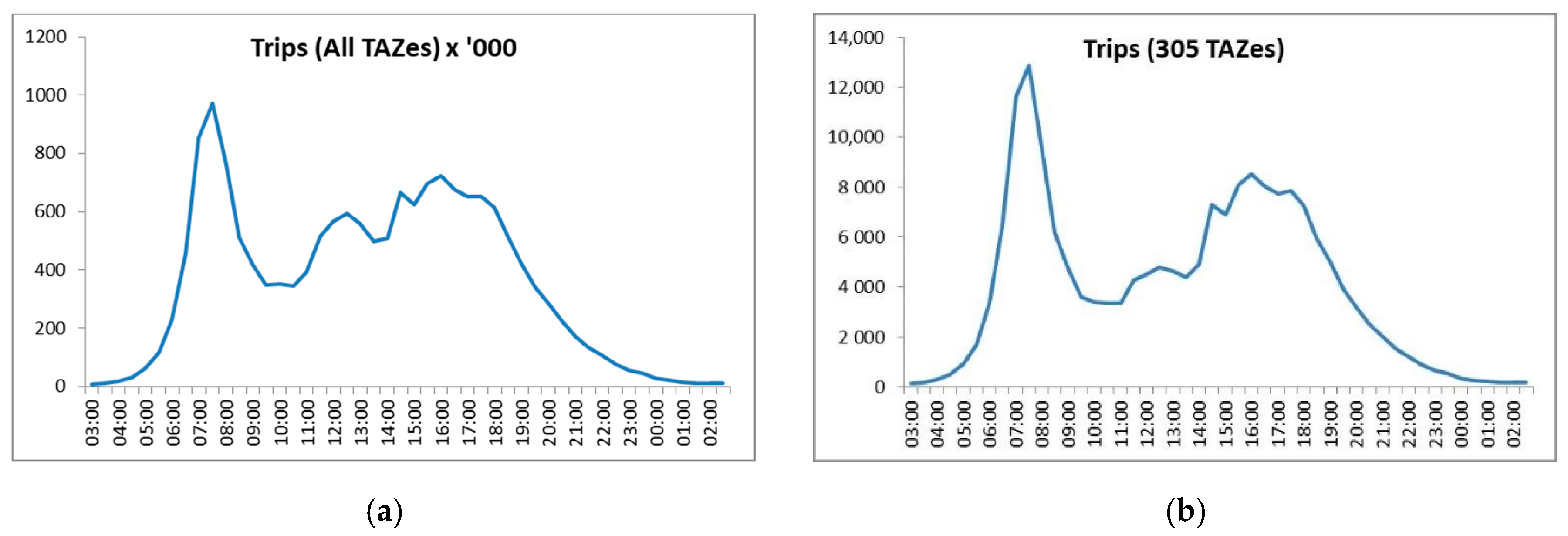
4.2.1. Datasets
4.2.2. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wang, F.; Zhu, Y.; Wang, F.; Liu, J. Ridesharing as a Service: Exploring Crowdsourced Connected Vehicle Information for Intelligent Package Delivery. In Proceedings of the 2018 IEEE/ACM 26th International Symposium on Quality of Service (IWQoS), Banff, AB, Canada, 4–6 June 2018; pp. 1–10. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, S.; Wang, J.; Wei, J.; Wang, C. An Empirical Study of Consumers’ Intention to Use Ride-Sharing Services: Using an Extended Technology Acceptance Model. Transportation 2020, 47, 397–415. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, Y. Examining the Relationship between Household Vehicle Ownership and Ridesharing Behaviors in the United States. Sustainability 2018, 10, 2720. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Guo, B.; Chen, C.; Du, H.; Yu, Z.; Zhang, D.; Ma, H. FooDNet: Toward an Optimized Food Delivery Network Based on Spatial Crowdsourcing. IEEE Trans. Mob. Comput. 2019, 18, 1288–1301. [Google Scholar] [CrossRef]
- Cleophas, C.; Cottrill, C.; Ehmke, J.F.; Tierney, K. Collaborative Urban Transportation: Recent Advances in Theory and Practice. Eur. J. Oper. Res. 2019, 273, 801–816. [Google Scholar] [CrossRef]
- Lee, C.; Rahafrooz, M.; Lee, O.K.D. What Are the Concerns of Using a Ride-Sharing Service?: An Investigation of Uber. In Proceedings of the AMCIS 2017—Americas Conference on Information Systems, Boston, MA, USA, 10–12 August 2017. [Google Scholar]
- Xu, Z.; Li, Z.; Guan, Q.; Zhang, D.; Li, Q.; Nan, J.; Liu, C.; Bian, W.; Ye, J. Large-Scale Order Dispatch in on-Demand Ride-Hailing Platforms: A Learning and Planning Approach. In Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, London, UK, 19–23 August 2018; pp. 905–913. [Google Scholar] [CrossRef]
- Agatz, N.; Erera, A.; Savelsbergh, M.; Wang, X. Optimization for Dynamic Ride-Sharing: A Review. Eur. J. Oper. Res. 2012, 223, 295–303. [Google Scholar] [CrossRef]
- Gruebele, P.A. Interactive System for Real Time Dynamic Multi-Hop Carpooling. Tech. Rep. Glob. Transp. Knowl. Partnersh. 2008. Available online: https://www.semanticscholar.org/paper/Interactive-System-for-Real-Time-Dynamic-Multi-hop-Gruebele/0be9bb4584623427ca9bd2ac806fb55249e3d7b2?p2df (accessed on 18 November 2020).
- Cortés, C.E.; Matamala, M.; Contardo, C. The Pickup and Delivery Problem with Transfers: Formulation and a Branch-and-Cut Solution Method. Eur. J. Oper. Res. 2010, 200, 711–724. [Google Scholar] [CrossRef]
- Teubner, T.; Flath, C.M. The Economics of Multi-Hop Ride Sharing: Creating New Mobility Networks Through IS. Bus. Inf. Syst. Eng. 2015, 57, 311–324. [Google Scholar] [CrossRef]
- Agatz, N.; Erera, A.; Savelsbergh, M.; Wang, X. Sustainable Passenger Transportation: Dynamic Ride-Sharing. SSRN 2010. ERIM Report Series Reference No. ERS-2010-010-LIS. [Google Scholar]
- Herbawi, W. Solving the Ridematching Problem in Dynamic Ridesharing. Ph.D. Thesis, University of Ulm, Ulm, Germany, 2012. [Google Scholar]
- Drews, F.; Luxen, D. Multi-Hop Ride Sharing. In Proceedings of the Sixth International Symposium on Combinatorial Search, Leavenworth, WA, USA, 11–13 July 2013; pp. 71–79. [Google Scholar]
- Buriol, L.S.; Resende, M.G.C.; Thorup, M. Speeding up Dynamic Shortest Path Algorithms. AT&T Labs Research Technical Report TD-5RJ8B, Florham Park, NJ, USA. 2003. Available online: http://www.optimization-online.org/DB_FILE/2003/09/732.pdf (accessed on 16 November 2020).
- Ramalingam, G.; Reps, T. An Incremental Algorithm for a Generalization of the Shortest-Path Problem. J. Algorithms 1996, 21, 267–305. [Google Scholar] [CrossRef] [Green Version]
- Agatz, N.A.H.; Erera, A.L.; Savelsbergh, M.W.P.; Wang, X. Dynamic Ride-Sharing: A Simulation Study in Metro Atlanta. Transp. Res. Part B Methodol. 2011, 45, 1450–1464. [Google Scholar] [CrossRef]
- Stiglic, M.; Agatz, N.; Savelsbergh, M.; Gradisar, M. The Benefits of Meeting Points in Ride-Sharing Systems. Transp. Res. Part B Methodol. 2015, 82, 36–53. [Google Scholar] [CrossRef] [Green Version]
- Furuhata, M.; Dessouky, M.; Ordóñez, F.; Brunet, M.E.; Wang, X.; Koenig, S. Ridesharing: The State-of-the-Art and Future Directions. Transp. Res. Part B Methodol. 2013, 57, 28–46. [Google Scholar] [CrossRef]
- Ben Cheikh, S.; Tahon, C.; Hammadi, S. An Evolutionary Approach to Solve the Dynamic Multihop Ridematching Problem. Simulation 2017, 93, 3–19. [Google Scholar] [CrossRef]
- Masoud, N.; Jayakrishnan, R. A Decomposition Algorithm to Solve the Multi-Hop Peer-to-Peer Ride-Matching Problem. Transp. Res. Part B Methodol. 2017, 99, 1–29. [Google Scholar] [CrossRef] [Green Version]
- Coltin, B.; Veloso, M. Ridesharing with Passenger Transfers. In Proceedings of the 2014 IEEE/RSJ International Conference onIntelligent Robots and Systems (IROS 2014), Chicago, IL, USA, 14–18 September 2014; pp. 3278–3283. [Google Scholar] [CrossRef]
- Alonso-Mora, J.; Samaranayake, S.; Wallar, A.; Frazzoli, E.; Rus, D. On-Demand High-Capacity Ride-Sharing via Dynamic Trip-Vehicle Assignment. Proc. Natl. Acad. Sci. USA 2017, 114, 462–467. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Zhang, D.; Ma, X.; Guo, B.; Wang, L.; Wang, Y.; Sha, E. CROWDDELIVER: Planning City-Wide Package Delivery Paths Leveraging the Crowd of Taxis. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1478–1496. [Google Scholar] [CrossRef]
- Chen, Y.; Guo, D.; Xu, M.; Tang, G.; Zhou, T.; Ren, B. PPtaxi: Non-Stop Package Delivery via Multi-Hop Ridesharing. IEEE Trans. Mob. Comput. 2019, 19. [Google Scholar] [CrossRef] [Green Version]
- Arslan, A.M.; Agatz, N.; Kroon, L.; Zuidwijk, R. Crowdsourced Delivery—A Dynamic Pickup and Delivery Problem with Ad Hoc Drivers. Transp. Sci. 2019, 53, 222–235. [Google Scholar] [CrossRef] [Green Version]
- Singh, A.; Alabbasi, A.; Aggarwal, V. A Reinforcement Learning Based Algorithm for Multi-Hop Ride-Sharing: Model-Free Approach. In Proceedings of the 2019 Conference on Neural Information Processing Systems, Vancouver Convention Centre, VN, Canada, 8–14 December 2019. [Google Scholar]
- Ta, N.; Li, G.; Zhao, T.; Feng, J.; Ma, H.; Gong, Z. An Efficient Ride-Sharing Framework for Maximizing Shared Route. IEEE Trans. Knowl. Data Eng. 2018, 30, 219–233. [Google Scholar] [CrossRef]
- Ferone, D.; Festa, P.; Napoletano, A.; Pastore, T. Shortest Paths on Dynamic Graphs: A Survey. Pesqui. Oper. 2017, 37, 487–508. [Google Scholar] [CrossRef] [Green Version]
- Demetrescu, C.; Italiano, G.F. Fully Dynamic All Pairs Shortest Paths with Real Edge Weights. J. Comput. Syst. Sci. 2006, 72, 813–837. [Google Scholar] [CrossRef]
- Ausiello, G.; Italiano, G.F.; Spaccamela, A.M. Incremental Algorithms for Minimal Length Paths*. J. Algorithms 1991, 638, 615–638. [Google Scholar] [CrossRef]
- D’Andrea, A.; Emidio, M.D.; Frigioni, D.; Leucci, S. Dynamic Maintenance of a Shortest-Path Tree on Homogeneous Batches of Updates: New Algorithms and Experiments. J. Exp. Algorithms 2015, 20, 1–33. [Google Scholar] [CrossRef]
- Frigioni, D.; Marchetti-spaccamela, A.; Nanni, U. Fully Dynamic Algorithms for Maintaining Shortest Paths Trees 1. J. Algorithms 2000, 34, 251–281. [Google Scholar] [CrossRef]
- Ramalingam, G.; Reps, T. On the Computational Complexity of Dynamic Graph Problems. Theor. Comput. Sci. 1996, 233–277. [Google Scholar] [CrossRef] [Green Version]
- Roditty, L.; Zwick, U. On Dynamic Shortest Paths Problems. Algorithmica 2011, 61, 389–401. [Google Scholar] [CrossRef] [Green Version]
- Geisberger, R.; Luxen, D.; Neubauer, S.; Sanders, P.; Volker, L. Fast Detour Computation for Ride Sharing. In 10th Workshop on Algorithmic Approaches for Transportation Modelling, Optimization, and Systems (ATMOS’10); Schloss Dagstuhl—Leibniz-Zentrum fuer Informatik: Oberwolfach, Germany, 2010; Volume 14, pp. 88–99. [Google Scholar] [CrossRef]
- Yen, J.Y. Finding the K Shortest Loopless Paths in a Network. Manage. Sci. 1971, 17, 712–716. [Google Scholar] [CrossRef]
- Plate, O. Ridesharing with Multiple Riders. Master’s Thesis, Karlsruhe Institute of Technology, Karlsruhe, Germany, 2019. [Google Scholar]
- Hartline, J.R.K. Incremental Optimization. Ph.D. Thesis, Cornell University, Ithaca, NY, USA, 2008. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # Routes (# Hops) | Total Trips | # Offers | # Requests | # Matches | % Matches |
|---|---|---|---|---|---|
| Single-Hop | 190,142 | 95,048 | 95,093 | 28,231 | 30% |
| 1(1) | 190,142 | 95,166 | 94,975 | 28,306 | 30% |
| 1(2) | 190,142 | 95,028 | 95,113 | 49,720 | 52% |
| 1(3) | 190,142 | 95,005 | 95,136 | 63,614 | 67% |
| 2(1, 2) | 190,142 | 95,156 | 94,985 | 50,739 | 53% |
| 2(1, 3) | 190,142 | 95,162 | 94,979 | 64,426 | 68% |
| 2(2, 3) | 190,142 | 95,046 | 95,046 | 64,093 | 67% |
| 3(1, 2, 3) | 190,142 | 95,009 | 95,009 | 64,996 | 68% |
| No. of Hops in Shared Rides | |||||||
|---|---|---|---|---|---|---|---|
| # Routes (# Hops) | Total Shared Rides | 1 Hop | 2 Hops | 3 Hops | 4 Hops | 5 Hops | |
| Single-Hop | # of rides | 28,231 | 28,231 | 0 | 0 | 0 | 0 |
| % age | 100 | 0 | 0 | 0 | 0 | ||
| 1(1) | # of rides | 28,306 | 28,305 | 1 | 0 | 0 | 0 |
| % age | 100 | 0 | 0 | 0 | 0 | ||
| 1(2) | # of rides | 49,720 | 33,731 | 15,619 | 371 | 1 | 0 |
| % age | 67.8 | 31.4 | 0.7 | 0 | 0 | ||
| 1(3) | # of rides | 63,614 | 33,353 | 26,982 | 3186 | 94 | 1 |
| % age | 52.4 | 42.4 | 5 | 0.1 | 0 | ||
| 2(1, 2) | # of rides | 50,739 | 37,890 | 12,559 | 289 | 1 | 0 |
| % age | 74.7 | 24.8 | 0.6 | 0 | 0 | ||
| 2(1, 3) | # of rides | 64,426 | 36,601 | 25,029 | 2718 | 78 | 1 |
| % age | 56.8 | 38.8 | 4.2 | 0.1 | 0 | ||
| 2(2, 3) | # of rides | 64,093 | 37,005 | 24,469 | 2558 | 61 | 1 |
| % age | 57.7 | 38.2 | 4 | 0.1 | 0 | ||
| 3(1, 2, 3) | # of rides | 64,996 | 38,267 | 24,260 | 2408 | 60 | 0 |
| % age | 58.9 | 37.3 | 3.7 | 0.1 | 0 | ||
| Without Ride Sharing | With Ride Sharing | ||||||
|---|---|---|---|---|---|---|---|
| # Routes (# Hops) | Total | Drivers | Riders | Total | Drivers | Riders | |
| Single-Hop | Vehicle Miles | 1,937,032 | 968,356 | 968,676 | 1,754,198 | 968,356 | 785,841 |
| % Change | −9.44 | ||||||
| 1(1) | Vehicle Miles | 1,937,032 | 969,024 | 968,008 | 1,753,451 | 969,024 | 784,427 |
| % Change | −9.5 | ||||||
| 1(2) | Vehicle Miles | 1,937,032 | 969,249 | 967,783 | 1,889,384 | 1,244,172 | 645,212 |
| % Change | −2.46 | ||||||
| 1(3) | Vehicle Miles | 1,937,032 | 968,253 | 968,779 | 2,171,785 | 1,646,400 | 525,385 |
| % Change | 12.12 | ||||||
| 2(1, 2) | Vehicle Miles | 1,937,032 | 969,233 | 967,799 | 1,701,850 | 1,065,845 | 636,005 |
| % Change | −12.14 | ||||||
| 2(1, 3) | Vehicle Miles | 1,937,032 | 969,382 | 967,650 | 1,862,026 | 1,348,964 | 513,062 |
| % Change | −3.87 | ||||||
| 2(2, 3) | Vehicle Miles | 1,937,032 | 968,811 | 968,221 | 1,915,395 | 1,396,055 | 519,340 |
| % Change | −1.12 | ||||||
| 3(1, 2, 3) | Vehicle Miles | 1,937,032 | 970,472 | 966,560 | 1,777,257 | 1,270,818 | 506,439 |
| % Change | −8.25 | ||||||
| Without Ride Sharing | With Ride Sharing | ||||||
|---|---|---|---|---|---|---|---|
| # Routes (# Hops) | Total | Drivers | Riders | Total | Drivers | Riders | |
| Single-Hop | Driving time | 5,012,511 | 2,505,802 | 2,506,708 | 4,422,048 | 2,505,802 | 1,916,245 |
| % Change | −11.78 | 0 | −23.56 | ||||
| Journey time | 5,355,301 | 2,505,802 | 2,849,499 | ||||
| % Change | 6.84 | 0 | 13.67 | ||||
| 1(1) | Driving time | 5,012,511 | 2,508,076 | 2,504,434 | 4,420,003 | 2,508,076 | 1,911,927 |
| % Change | −11.82 | 0 | −23.66 | ||||
| Journey time | 5,356,673 | 2,508,076 | 2,848,597 | ||||
| % Change | 6.87 | 0 | 13.74 | ||||
| 1(2) | Driving time | 5,012,511 | 2,507,610 | 2,504,900 | 5,018,772 | 3,532,178 | 1,486,593 |
| % Change | 0.12 | 40.86 | −40.65 | ||||
| Journey time | 7,061,415 | 3,532,178 | 3,529,236 | ||||
| % Change | 40.88 | 40.86 | 40.89 | ||||
| 1(3) | Driving time | 5,012,511 | 2,505,690 | 2,506,820 | 5,978,315 | 4,824,037 | 1,154,278 |
| % Change | 19.27 | 92.52 | −53.95 | ||||
| Journey time | 9,041,034 | 4,824,037 | 4,216,996 | ||||
| % Change | 80.37 | 92.52 | 68.22 | ||||
| 2(1, 2) | Driving time | 5,012,511 | 2,508,778 | 2,503,732 | 4,368,025 | 2,909,390 | 1,458,635 |
| % Change | −12.86 | 15.97 | −41.74 | ||||
| Journey time | 6,272,000 | 2,909,390 | 3,362,610 | ||||
| % Change | 25.13 | 15.97 | 34.3 | ||||
| 2(1, 3) | Driving time | 5,012,511 | 2,508,695 | 2,503,815 | 4,995,438 | 3,872,414 | 1,123,023 |
| % Change | −0.34 | 54.36 | −55.15 | ||||
| Journey time | 7,893,168 | 3,872,414 | 4,020,754 | ||||
| % Change | 57.47 | 54.36 | 60.59 | ||||
| 2(2, 3) | Driving time | 5,012,511 | 2,507,030 | 2,505,480 | 5,183,796 | 4,044,579 | 1,139,216 |
| % Change | 3.42 | 61.33 | −54.53 | ||||
| Journey time | 8,038,910 | 4,04,4579 | 3,994,330 | ||||
| % Change | 60.38 | 61.33 | 59.42 | ||||
| 3(1, 2, 3) | Driving time | 5,012,511 | 2,509,950 | 2,502,560 | 4,725,407 | 3,617,905 | 1,107,502 |
| % Change | −5.73 | 44.14 | −55.75 | ||||
| Journey time | 7,522,365 | 3,617,905 | 3,904,460 | ||||
| % Change | 50.07 | 44.14 | 56.02 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shah, I.; El Affendi, M.; Qureshi, B. SRide: An Online System for Multi-Hop Ridesharing. Sustainability 2020, 12, 9633. https://doi.org/10.3390/su12229633
Shah I, El Affendi M, Qureshi B. SRide: An Online System for Multi-Hop Ridesharing. Sustainability. 2020; 12(22):9633. https://doi.org/10.3390/su12229633
Chicago/Turabian StyleShah, Inayatullah, Mohammed El Affendi, and Basit Qureshi. 2020. "SRide: An Online System for Multi-Hop Ridesharing" Sustainability 12, no. 22: 9633. https://doi.org/10.3390/su12229633
APA StyleShah, I., El Affendi, M., & Qureshi, B. (2020). SRide: An Online System for Multi-Hop Ridesharing. Sustainability, 12(22), 9633. https://doi.org/10.3390/su12229633