A Kalman Filter-Based Approach for Online Source-Term Estimation in Accidental Radioactive Dispersion Events



Abstract
:1. Introduction
2. Materials and Methods
2.1. Atmospheric Dispersion Modelling
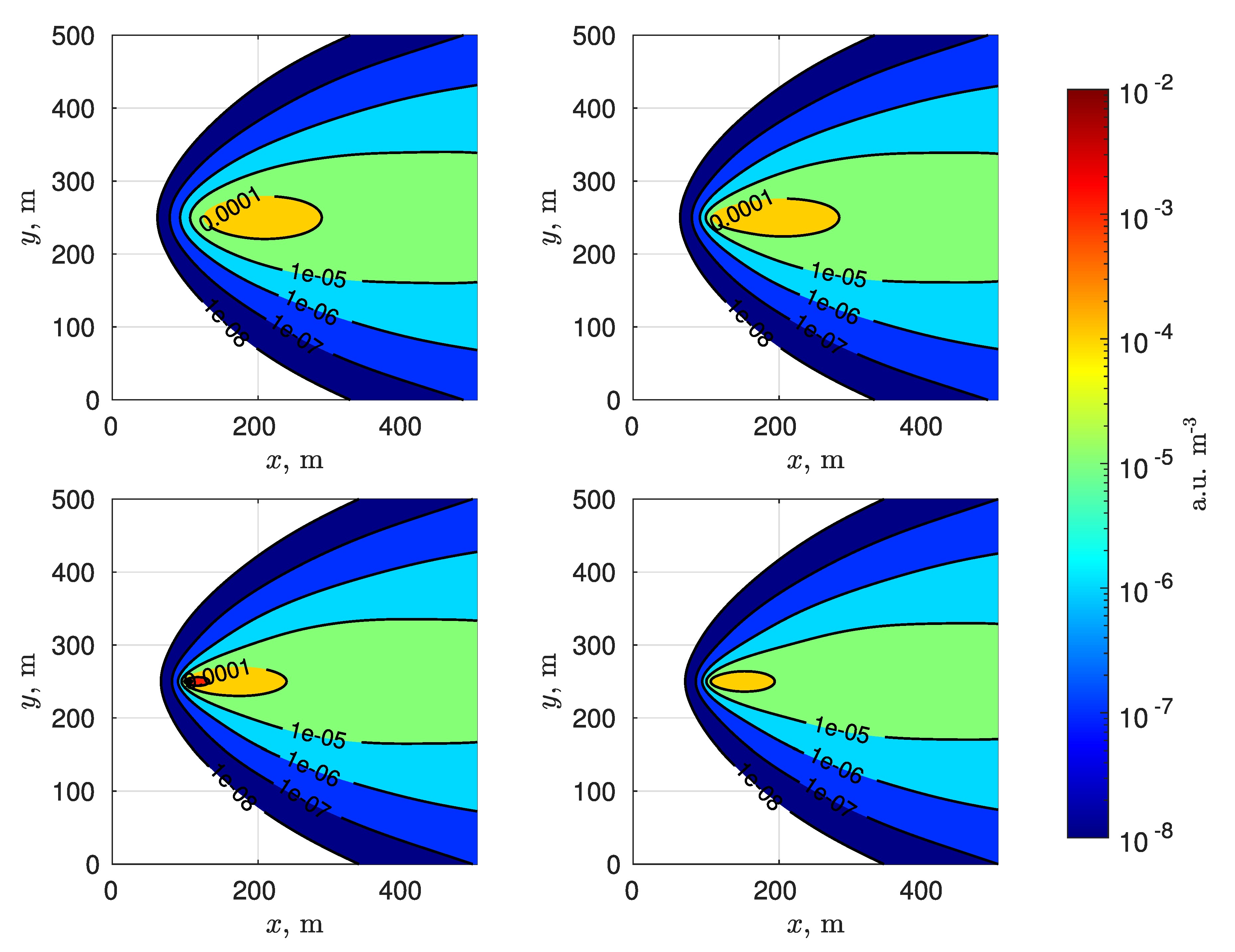
2.1.1. The Gaussian Plume Model
- (i)
- The source of contaminant can be considered as localised in a single point (point source approach).
- (ii)
- The release rate from the source is continuous and constant in time.
- (iii)
- The wind speed and direction are both constant in time and uniform in space.
- (iv)
- Atmospheric turbulence is constant in time and uniform in space.
2.1.2. The SCIPUFF Model
2.2. The Kalman Filter Algorithm
2.2.1. The Original Formulation
- (i)
- the stochastic vector variables and follow multivariate Gaussian probability distributions, each characterised by zero mean and covariance matrices and , respectively (i.e., , , );
- (ii)
- the stochastic vectors variables and are not cross-correlated, i.e., , for ;
- (iii)
- the operators and are linear.
- (i)
- the estimate of the system state at the previous instant is characterised by an expected value and a covariance matrix ;
- (ii)
- one or more measurements have been performed on the system at time t, yielding the measurement vector .
2.2.2. The Extended Kalman Filter Algorithm
2.3. Architecture of the Proposed Source Term Estimation Algorithm
2.3.1. Parametrisation of Atmospheric Stability
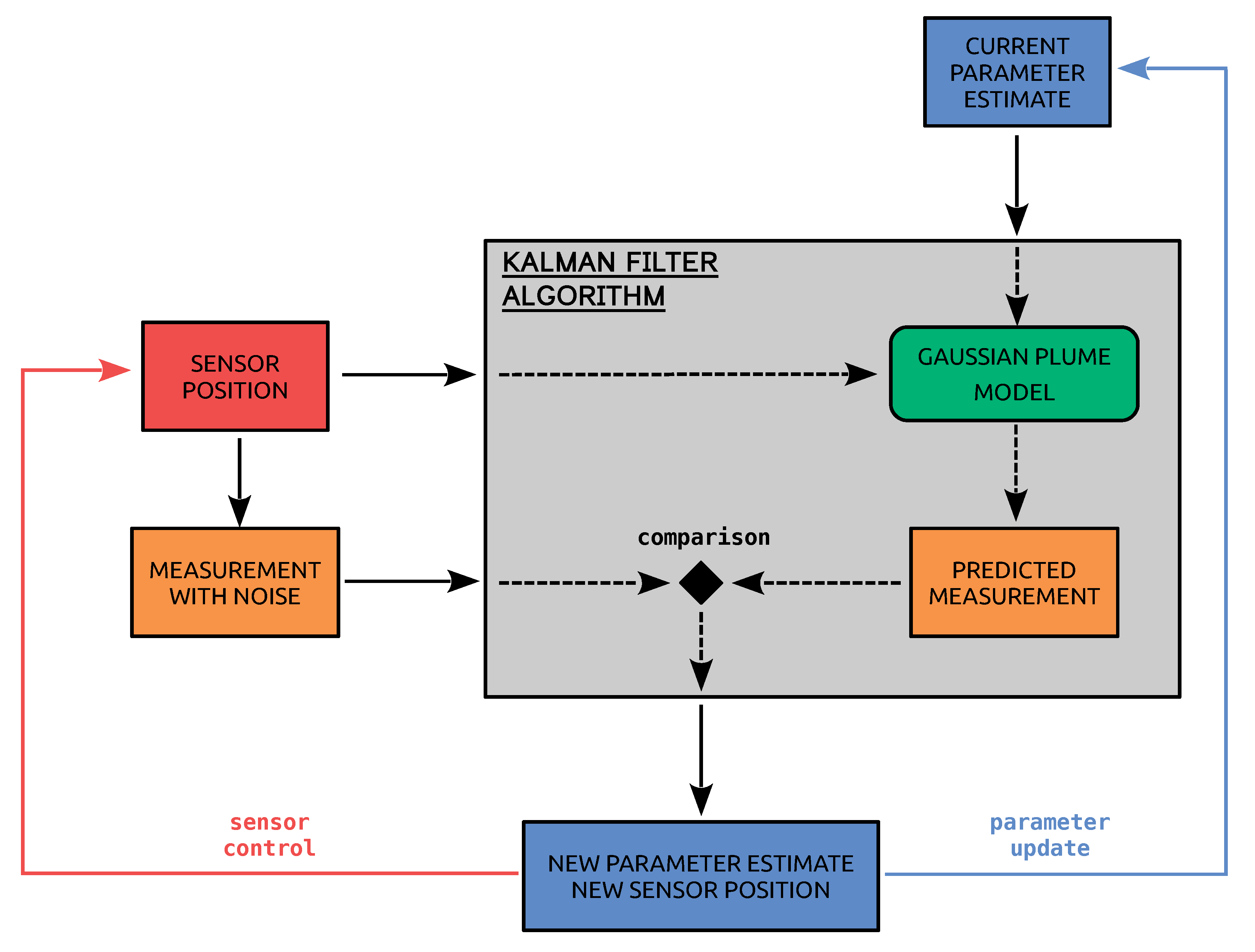
2.3.2. Embedding in the Kalman Filter Algorithm
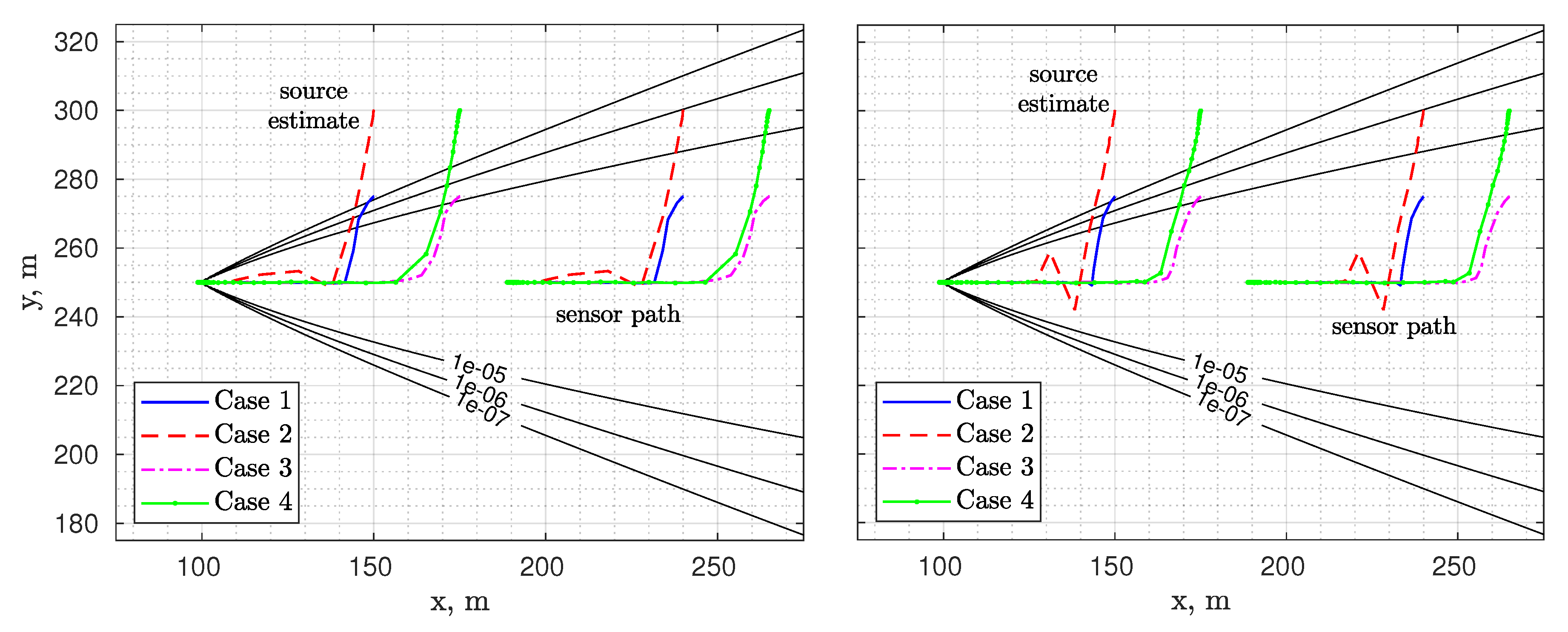
2.3.3. Sampling Strategy
2.4. Case Study
3. Results
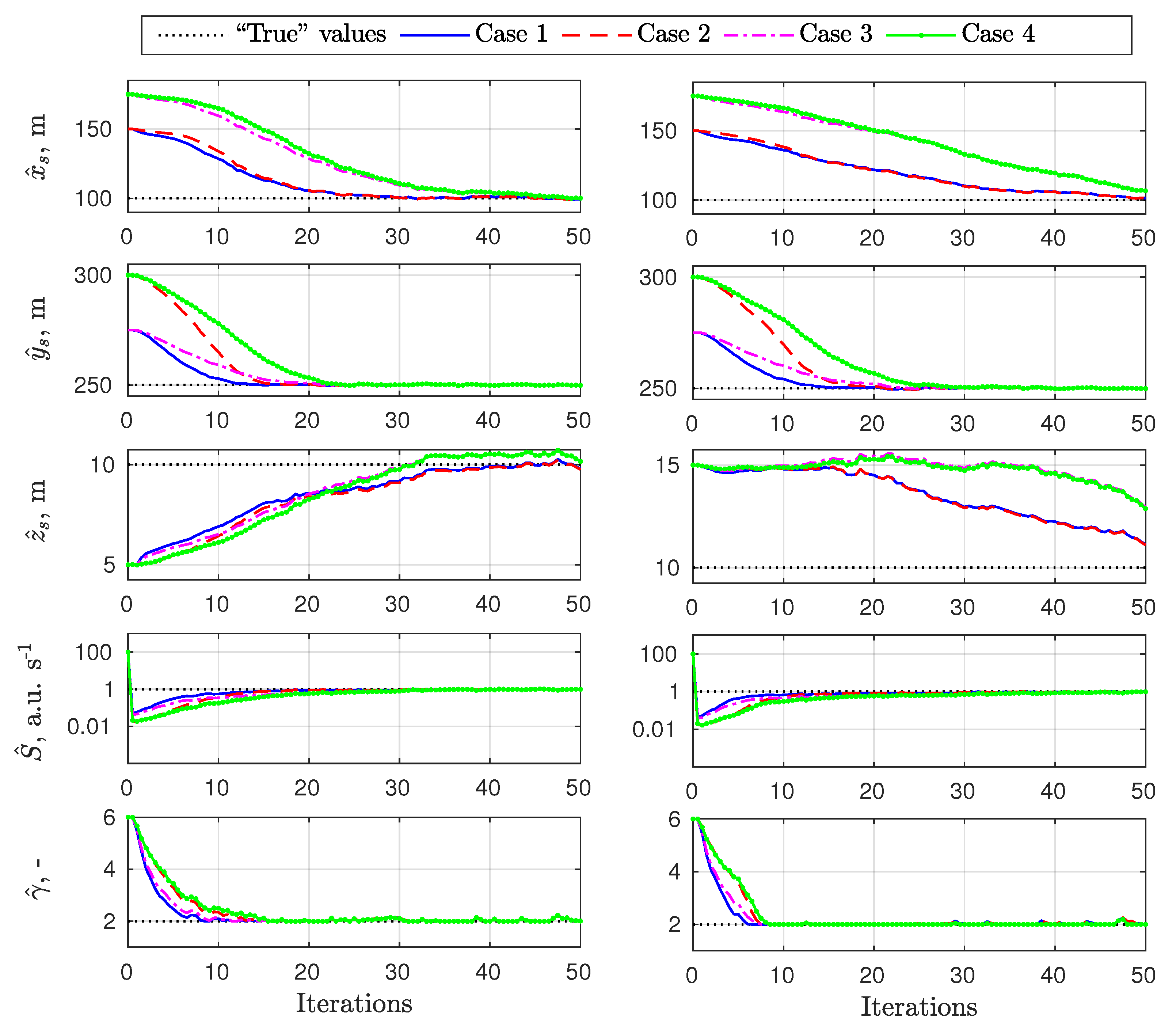
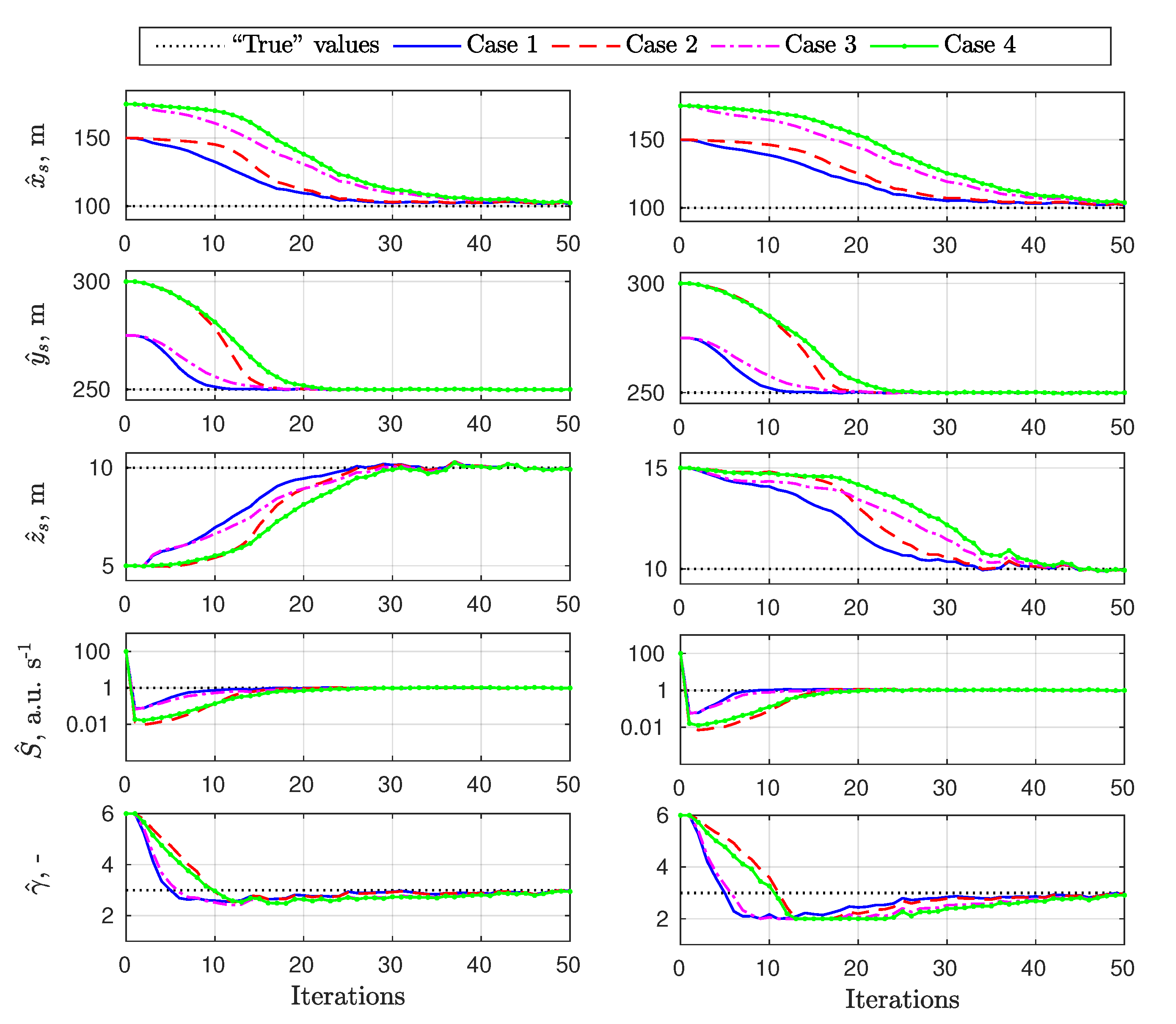
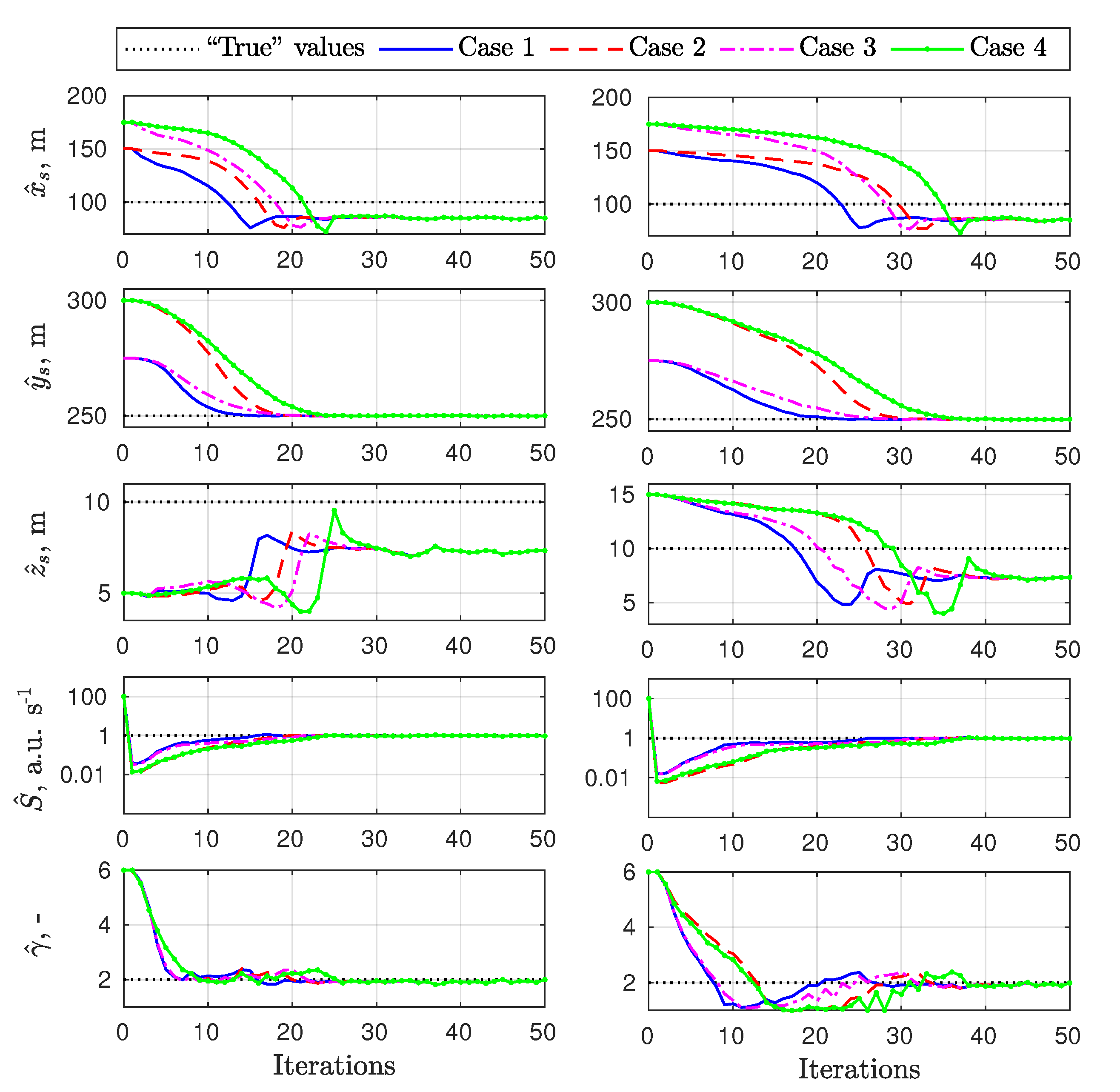
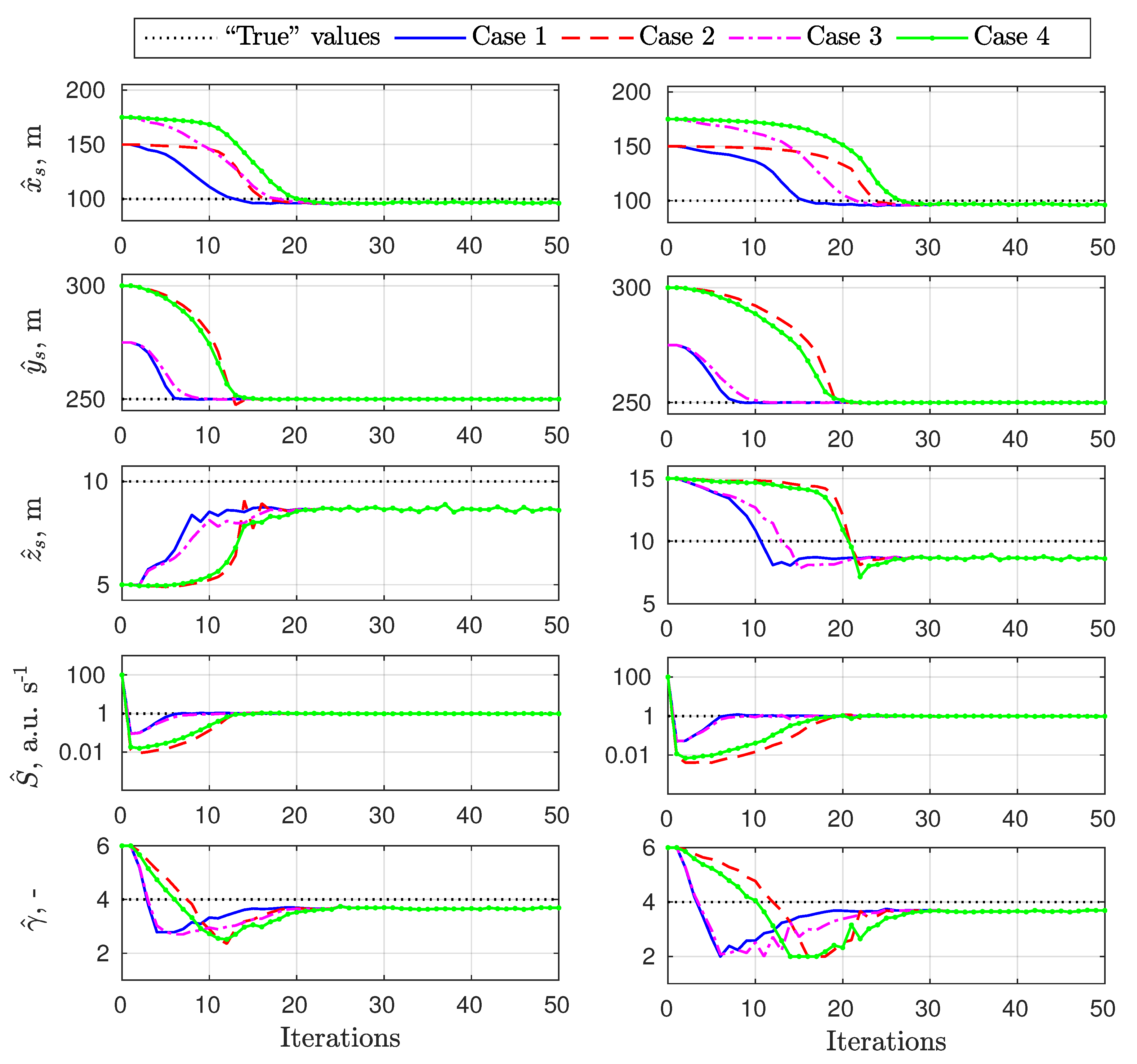
3.1. Verification against Pseudo-Experimental Data Generated with the Gaussian Plume Model
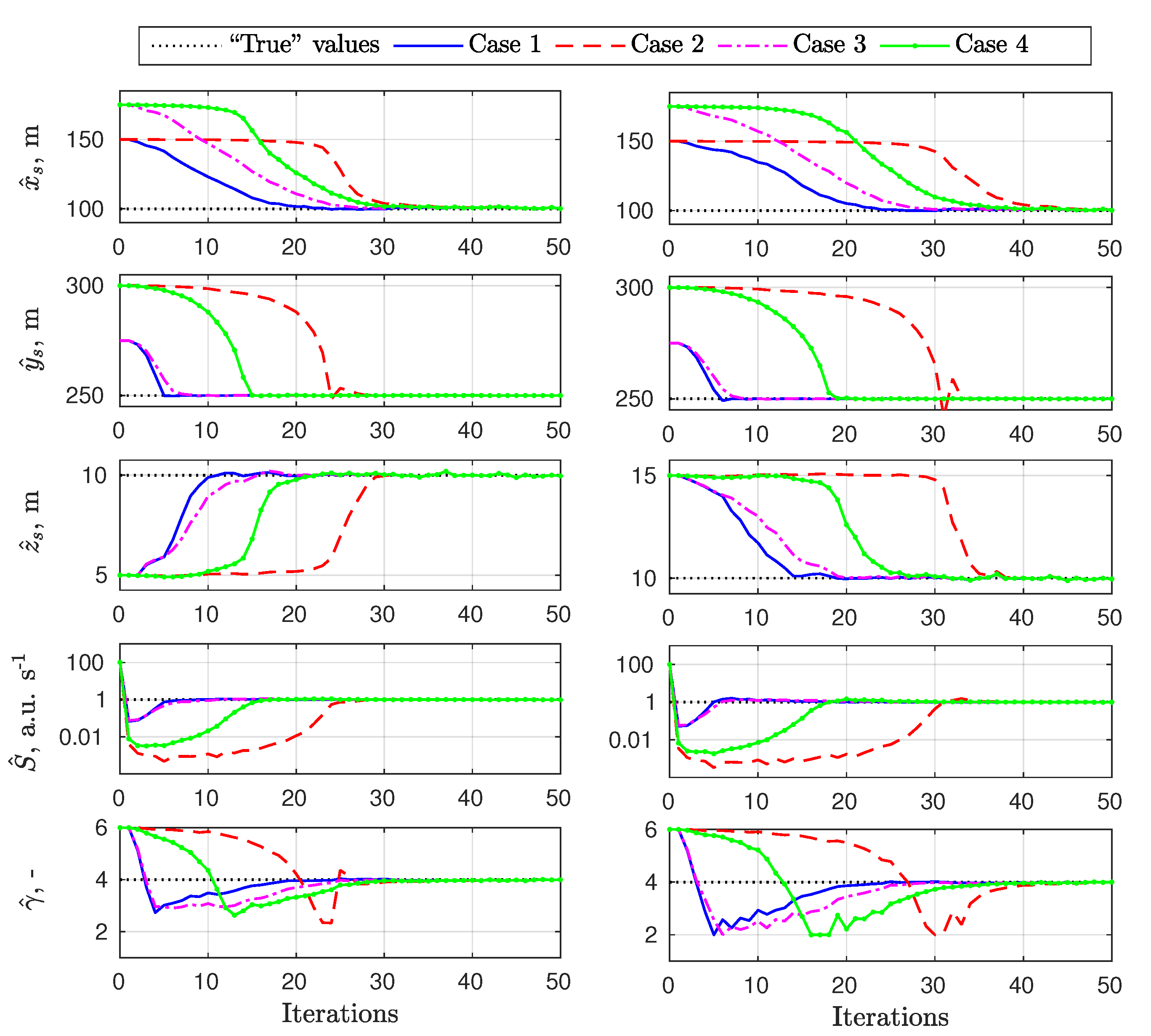
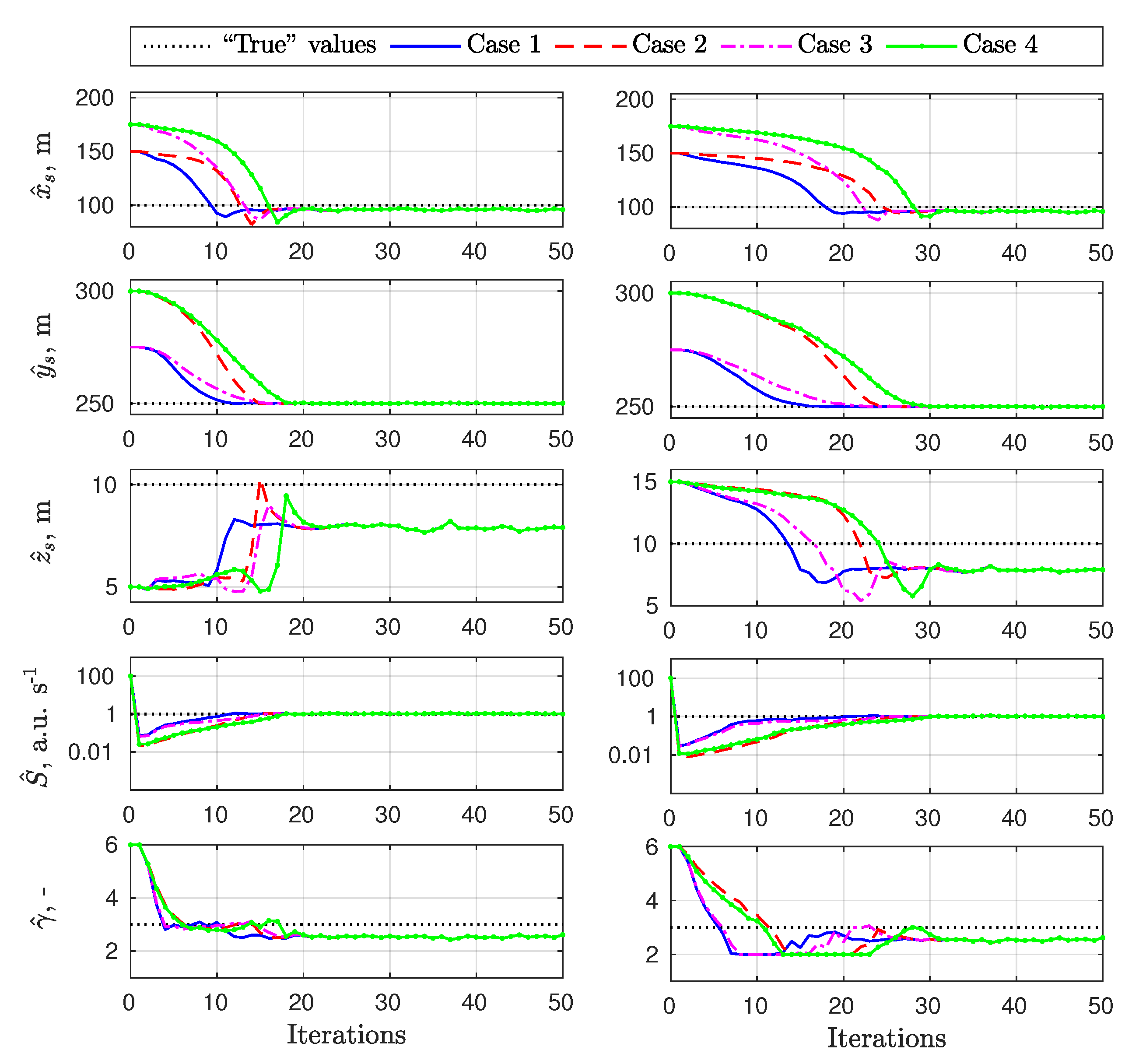
3.2. Verification against Pseudo-Experimental Data Generated with the SCIPUFF Model
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Leelőssy, Á.; Lagzi, I.; Kovács, A.; Mészáros, R. A review of numerical models to predict the atmospheric dispersion of radionuclides. J. Environ. Radioact. 2018, 182, 20–33. [Google Scholar] [CrossRef] [PubMed]
- Tominaga, Y.; Stathopoulos, T. CFD simulations of near-field pollutant dispersion with different plume buoyancies. Build. Environ. 2018, 131, 128–139. [Google Scholar] [CrossRef]
- Lateb, M.; Meroney, R.; Yataghene, M.; Fellouah, H.; Saleh, F.; Boufadel, M. On the use of numerical modelling for near-field pollutant dispersion in urban environments-A review. Environ. Pollut. 2016, 208, 271–283. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- de Sampaio, P.A.; Junior, M.A.; Lapa, C.M. A CFD approach to the atmospheric dispersion of radionuclides in the vicinity of NPPs. Nucl. Eng. Des. 2008, 238, 250–273. [Google Scholar] [CrossRef]
- Huh, C.A.; Lin, C.Y.; Hsu, S.C. Regional dispersal of Fukushima-derived fission nuclides by east-asian monsoon: A synthesis and review. Aerosol Air Qual. Res. 2013, 13, 537–544. [Google Scholar] [CrossRef]
- Mikkelsen, T.; Thykier-Nielsen, S.; Astrup, P.; Santabárbara, J.; Sørensen, J.; Rasmussen, A.; Robertson, L.; Ullerstig, A.; Deme, S.; Martens, R.; et al. MET-RODOS: A Comprehensive Atmospheric Dispersion Module. Radiat. Prot. Dosim. 1997, 73, 45–55. [Google Scholar] [CrossRef]
- An, H.Y.; Kang, Y.H.; Song, S.K.; Kim, Y.K. Comparison of CALPUFF and HYSPLIT models for atmospheric dispersion simulations of radioactive materials. J. Korean Soc. Atmos. Environ. 2015, 31, 573–584. [Google Scholar] [CrossRef] [Green Version]
- Connan, O.; Smith, K.; Organo, C.; Solier, L.; Maro, D.; Hébert, D. Comparison of RIMPUFF, HYSPLIT, ADMS atmospheric dispersion model outputs, using emergency response procedures, with 85Kr measurements made in the vicinity of nuclear reprocessing plant. J. Environ. Radioact. 2013, 124, 266–277. [Google Scholar] [CrossRef]
- Stockie, J. The mathematics of atmospheric dispersion modeling. SIAM Rev. 2011, 53, 349–372. [Google Scholar] [CrossRef]
- Tarantola, A. Inverse Problem Theory and Methods for Model Parameter Estimation; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2005. [Google Scholar]
- Hutchinson, M.; Oh, H.; Chen, W. A review of source term estimation methods for atmospheric dispersion events using static or mobile sensors. Inf. Fusion 2017, 36, 130–148. [Google Scholar] [CrossRef] [Green Version]
- Ristic, B.; Gunatilaka, A.; Gailis, R. Achievable accuracy in Gaussian plume parameter estimation using a network of binary sensors. Inf. Fusion 2015, 25, 42–48. [Google Scholar] [CrossRef]
- Borysiewicz, M.; Wawrzynczak, A.; Kopka, P. Bayesian-Based Methods for the Estimation of the Unknown Model’s Parameters in the Case of the Localization of the Atmospheric Contamination Source. Found. Comput. Decis. Sci. 2012, 37, 253–270. [Google Scholar] [CrossRef] [Green Version]
- Singh, S.K.; Rani, R. A least-squares inversion technique for identification of a point release: Application to Fusion Field Trials 2007. Atmos. Environ. 2014, 92, 104–117. [Google Scholar] [CrossRef]
- Keats, A.; Yee, E.; Lien, F.S. Bayesian inference for source determination with applications to a complex urban environment. Atmos. Environ. 2007, 41, 465–479. [Google Scholar] [CrossRef]
- Kumar, P.; Feiz, A.A.; Singh, S.K.; Ngae, P.; Turbelin, G. Reconstruction of an atmospheric tracer source in an urban-like environment. J. Geophys. Res. Atmos. 2015, 120, 12589–12604. [Google Scholar] [CrossRef] [Green Version]
- Sykes, R.I.; Parker, S.F.; Henn, D.S.; Gabruk, R.S. SCIPUFF-A generalized dispersion model. In Air Pollution Modeling and Its Application XI; Gryning, S.E., Schiermeier, F.A., Eds.; Springer: Boston, MA, USA, 1996; pp. 425–432. [Google Scholar]
- Allen, C.T.; Haupt, S.E.; Young, G.S. Source Characterization with a Genetic Algorithm–Coupled Dispersion–Backward Model Incorporating SCIPUFF. J. Appl. Meteorol. Climatol. 2007, 46, 273–287. [Google Scholar] [CrossRef]
- Annunzio, A.J.; Young, G.S.; Haupt, S.E. A Multi-Entity Field Approximation to determine the source location of multiple atmospheric contaminant releases. Atmos. Environ. 2012, 62, 593–604. [Google Scholar] [CrossRef]
- Zheng, X.; Chen, Z. Back-calculation of the strength and location of hazardous materials releases using the pattern search method. J. Hazard. Mater. 2010, 183, 474–481. [Google Scholar] [CrossRef]
- Wade, D.; Senocak, I. Stochastic reconstruction of multiple source atmospheric contaminant dispersion events. Atmos. Environ. 2013, 74, 45–51. [Google Scholar] [CrossRef] [Green Version]
- Senocak, I.; Hengartner, N.W.; Short, M.B.; Daniel, W.B. Stochastic event reconstruction of atmospheric contaminant dispersion using Bayesian inference. Atmos. Environ. 2008, 42, 7718–7727. [Google Scholar] [CrossRef] [Green Version]
- Ristic, B.; Skvortsov, A.; Walker, A. Autonomous search for a diffusive source in an unknown structured environment. Entropy 2014, 16, 789–813. [Google Scholar] [CrossRef] [Green Version]
- Madankan, R.; Singla, P.; Singh, T. Optimal information collection for source parameter estimation of atmospheric release phenomenon. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 604–609. [Google Scholar] [CrossRef]
- Drews, M.; Lauritzen, B.; Madsen, H.; Smith, J.Q. Kalman filtration of radiation monitoring data from atmospheric dispersion of radioactive materials. Radiat. Prot. Dosim. 2004, 111, 257–269. [Google Scholar] [CrossRef] [PubMed]
- De Visscher, A. Air Dispersion Modeling: Foundations and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Pasquill, F. The Estimation of the Dispersion of Windborne Material. Meteorol. Manag. 1961, 90, 33–49. [Google Scholar]
- Gifford, F.A. Use of Routine Meteorological Observations for Estimating Atmospheric Dispersion. Nucl. Saf. 1961, 2, 47–51. [Google Scholar]
- Briggs, G.A. Diffusion Estimation for Small Emissions; Preliminary Report; Technical Report; NOAA Atmospheric Turbulence and Diffusion Laboratory: Oak Ridge, TN, USA, 1973. [Google Scholar] [CrossRef] [Green Version]
- Zannetti, P. Air Pollution Modeling: Theories, Computational Methods and Available Software; Springer US: New York City, NY, USA, 1990. [Google Scholar]
- Sykes, R.I.; Lewellen, W.S.; Parker, S.F. A Gaussian plume model of atmospheric dispersion based on second-order closure. J. Clim. Appl. Meteorol. 1986, 25, 322–331. [Google Scholar] [CrossRef] [Green Version]
- Karamchandani, P.; Santos, L.; Sykes, I.; Zhang, Y.; Tonne, C.; Seigneur, C. Development and evaluation of a state-of-the-science reactive plume model. Environ. Sci. Technol. 2000, 34, 870–880. [Google Scholar] [CrossRef]
- Chowdhury, B.; Karamchandani, P.K.; Sykes, R.I.; Henn, D.S.; Knipping, E. Reactive puff model SCICHEM: Model enhancements and performance studies. Atmos. Environ. 2015, 117, 242–258. [Google Scholar] [CrossRef]
- Kalman, R. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Gibbs, B. Advanced Kalman Filtering, Least-Squares and Modeling: A Practical Handbook; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Julier, S.; Uhlmann, J. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PGT Class | |||||||
|---|---|---|---|---|---|---|---|
| A | 1 | 0.22 | 0.0001 | −0.5 | 0.200 | 0 | 0 |
| B | 2 | 0.16 | 0.0001 | −0.5 | 0.120 | 0 | 0 |
| C | 3 | 0.11 | 0.0001 | −0.5 | 0.080 | 0.0002 | −0.5 |
| D | 4 | 0.08 | 0.0001 | −0.5 | 0.060 | 0.0015 | −0.5 |
| E | 5 | 0.06 | 0.0001 | −0.5 | 0.030 | 0.0003 | −1 |
| F | 6 | 0.04 | 0.0001 | −0.5 | 0.016 | 0.0003 | −1 |
| Parameter | Units | Value | |
|---|---|---|---|
| Release x-coordinate | m | 100 | |
| Release y-coordinate | m | 250 | |
| Release z-coordinate | m | 10 | |
| Release intensity | S | a.u. s−1 | 1 |
| Wind speed | u | m s−1 | 5 |
| Wind angle | 0 | ||
| Stability class parameter | - | [2,3,4] |
| Parameter | Units | Value | |
|---|---|---|---|
| Measurement noise (std. deviation) | a.u. m−3 | 10−6 | |
| Measurement location | m | 90 | |
| Position of additional meas. in x-direction | m | 5 | |
| Position of additional meas. in y-direction | m | 5 | |
| Position of additional meas. in z-direction | m | 1 |
| State | Units | Case 1 | Case 2 | Case 3 | Case 4 |
|---|---|---|---|---|---|
| m | +50 | +50 | +75 | +75 | |
| m | +25 | +50 | +25 | +50 | |
| m | [−5,+5] | ||||
| a.u. m−3 | 100 | ||||
| - | 6 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Di Ronco, A.; Giacobbo, F.; Cammi, A. A Kalman Filter-Based Approach for Online Source-Term Estimation in Accidental Radioactive Dispersion Events. Sustainability 2020, 12, 10003. https://doi.org/10.3390/su122310003
Di Ronco A, Giacobbo F, Cammi A. A Kalman Filter-Based Approach for Online Source-Term Estimation in Accidental Radioactive Dispersion Events. Sustainability. 2020; 12(23):10003. https://doi.org/10.3390/su122310003
Chicago/Turabian StyleDi Ronco, Andrea, Francesca Giacobbo, and Antonio Cammi. 2020. "A Kalman Filter-Based Approach for Online Source-Term Estimation in Accidental Radioactive Dispersion Events" Sustainability 12, no. 23: 10003. https://doi.org/10.3390/su122310003
APA StyleDi Ronco, A., Giacobbo, F., & Cammi, A. (2020). A Kalman Filter-Based Approach for Online Source-Term Estimation in Accidental Radioactive Dispersion Events. Sustainability, 12(23), 10003. https://doi.org/10.3390/su122310003