Integrated Detection of a Complex Underground Water Supply Pipeline System in an Old Urban Community in China




Abstract
:1. Introduction
2. Characteristics of Underground Water Supply Pipelines in Old Urban Communities
2.1. Different Pipeline Materials
2.2. Complexity of Pipeline Connection
2.3. Uncertainty of Pipeline Information in Original Maps
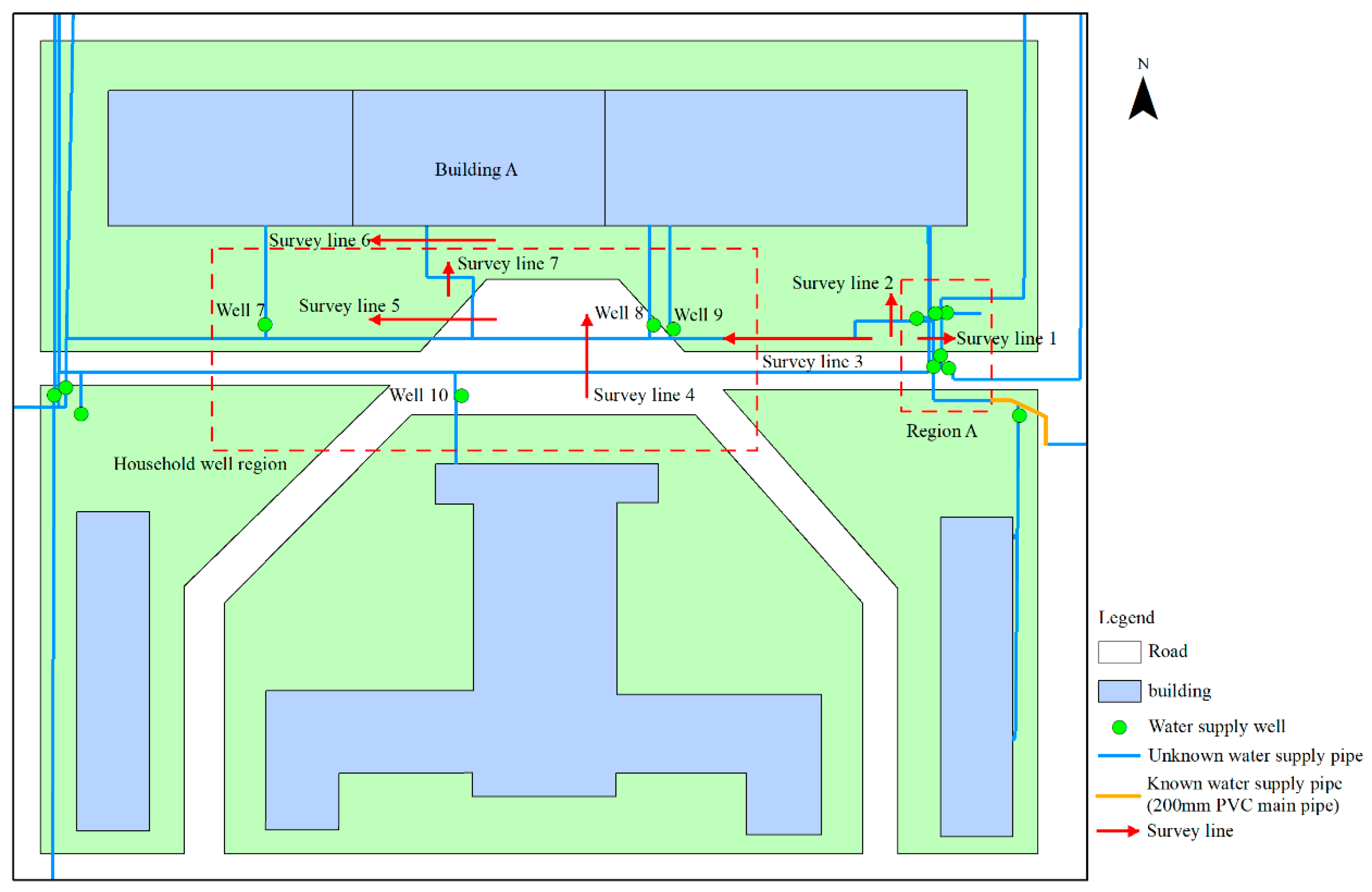
3. Survey Area
3.1. Geographical Location
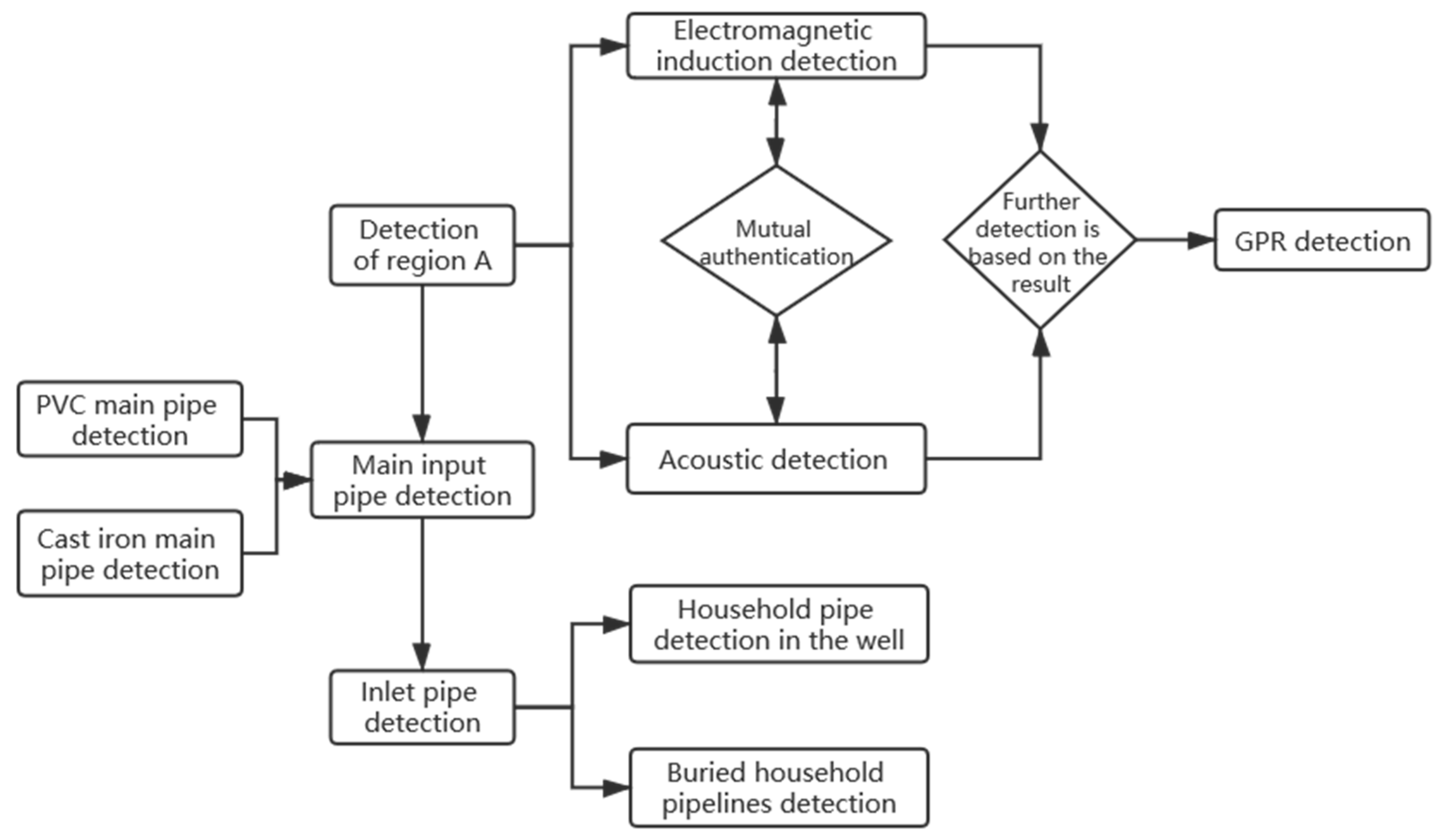
3.2. Survey Flow
4. Detection Methods and Experiment Scheme
4.1. Experiment Scheme
4.2. Methods for Underground Pipeline Detection
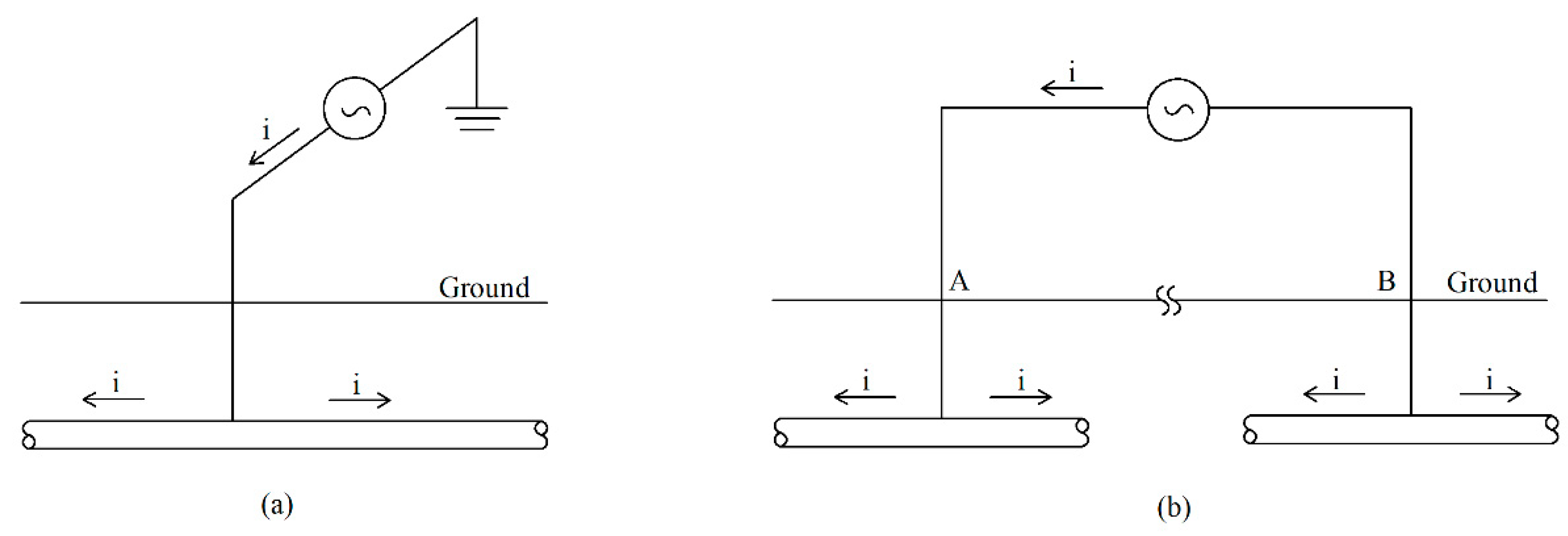
4.2.1. The Acoustic Detection Method
4.2.2. The Electromagnetic Induction Method
4.2.3. GPR
5. Detection Results
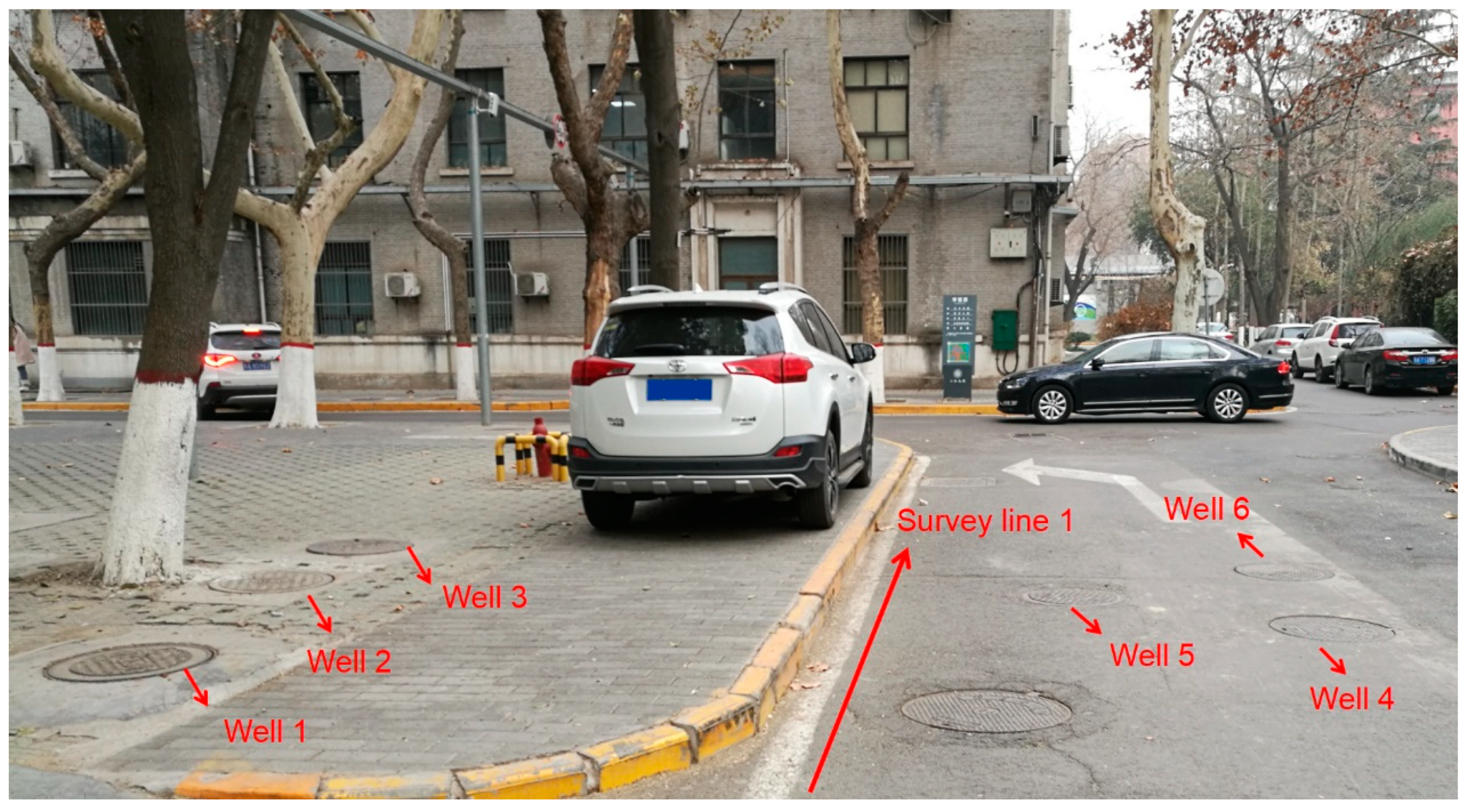
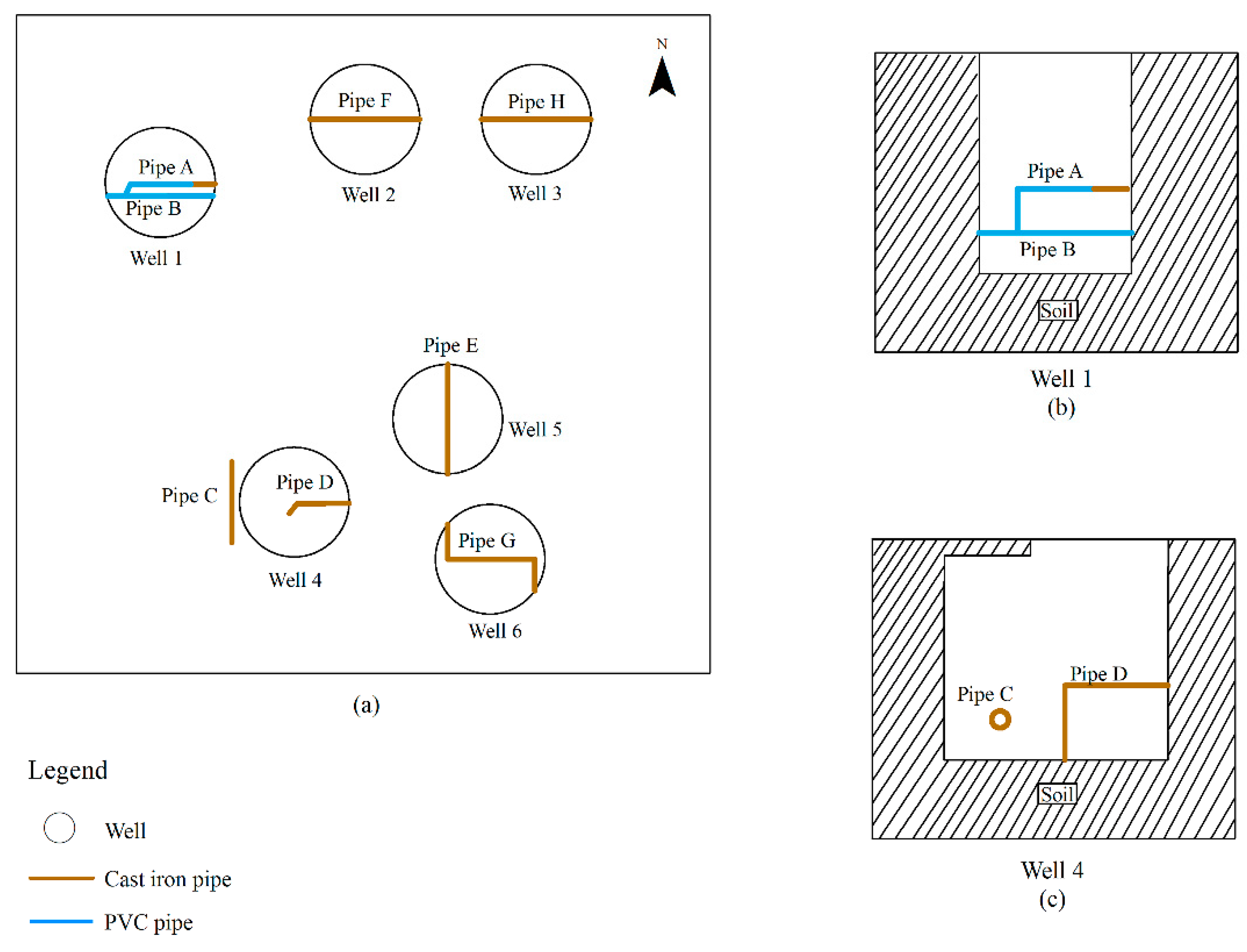
5.1. Region A
5.1.1. Electromagnetic Induction Detection Results
5.1.2. Acoustic Detection Results
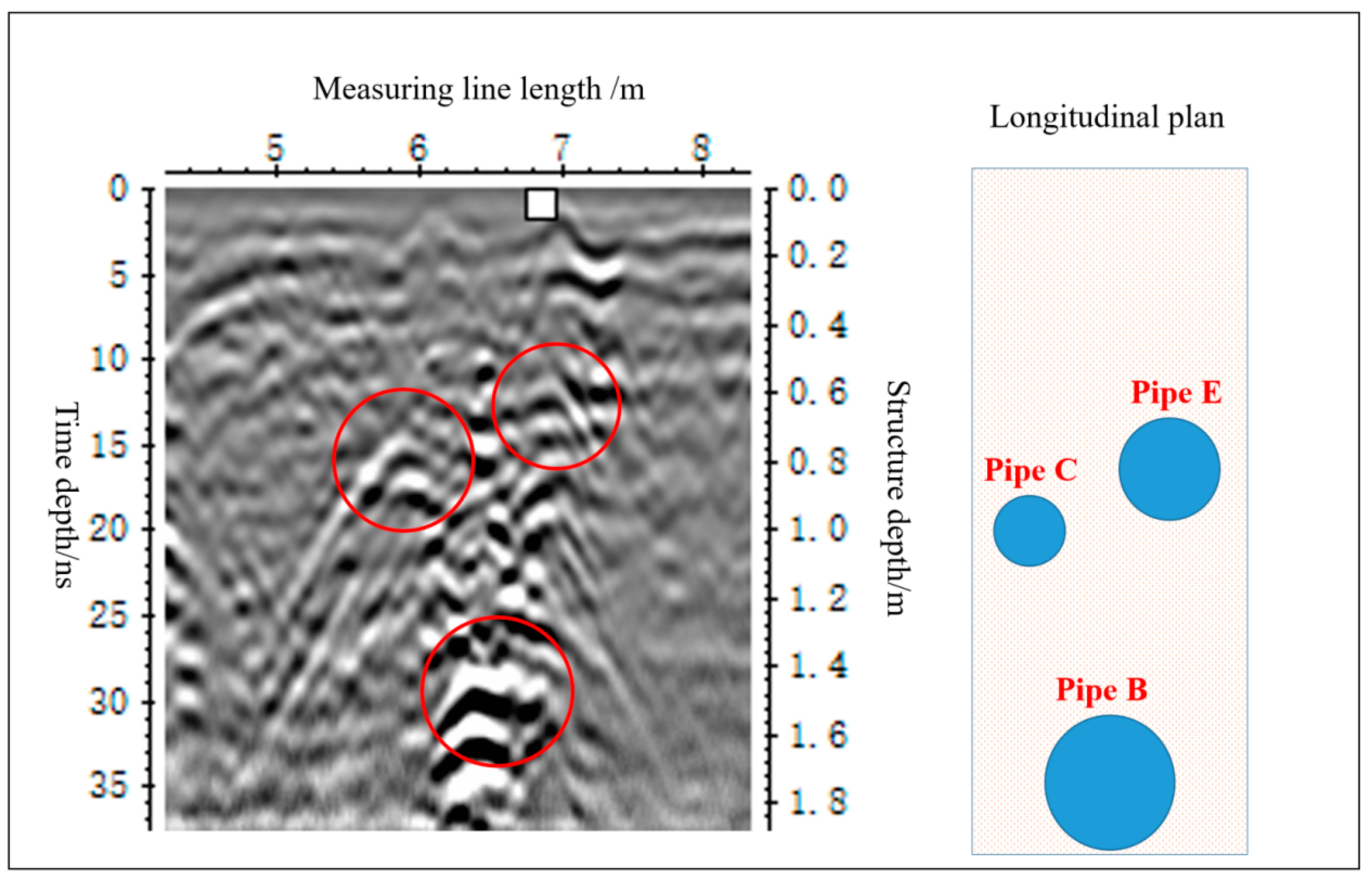
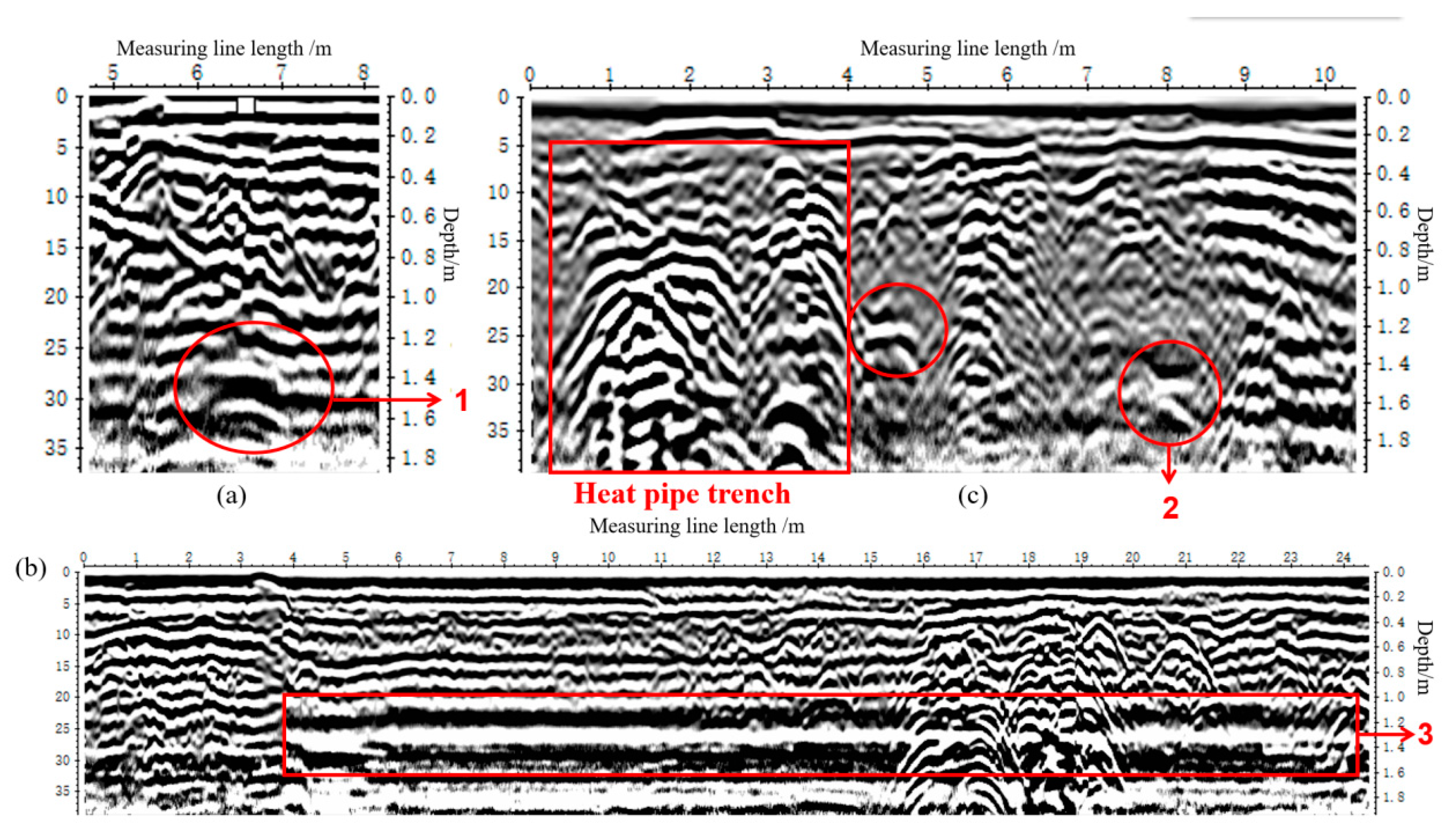
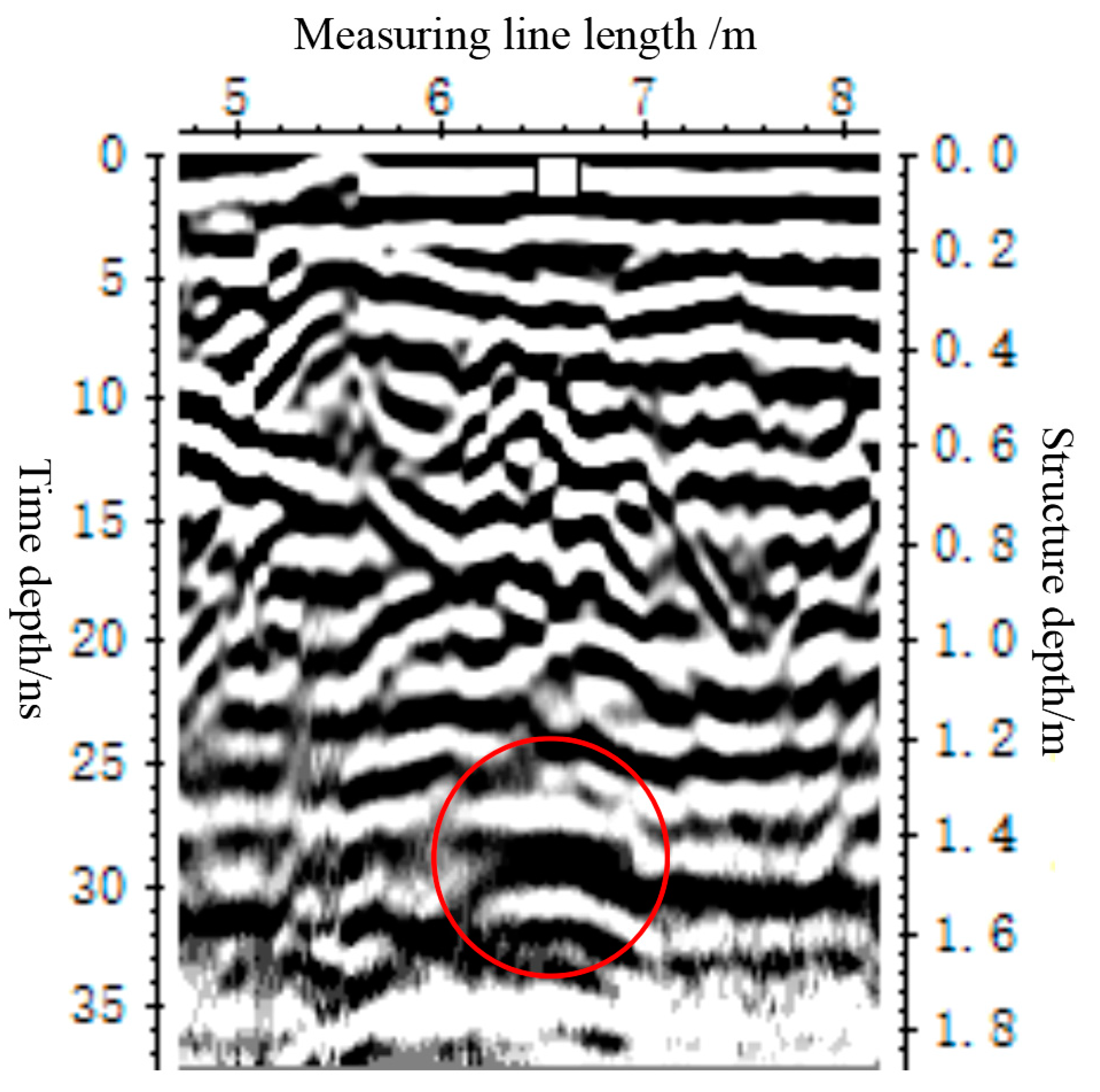
5.1.3. GPR Detection Results
5.2. Main Input Pipeline Detection
5.2.1. Main Input PVC Pipeline Detection
5.2.2. Main Cast Iron Pipe
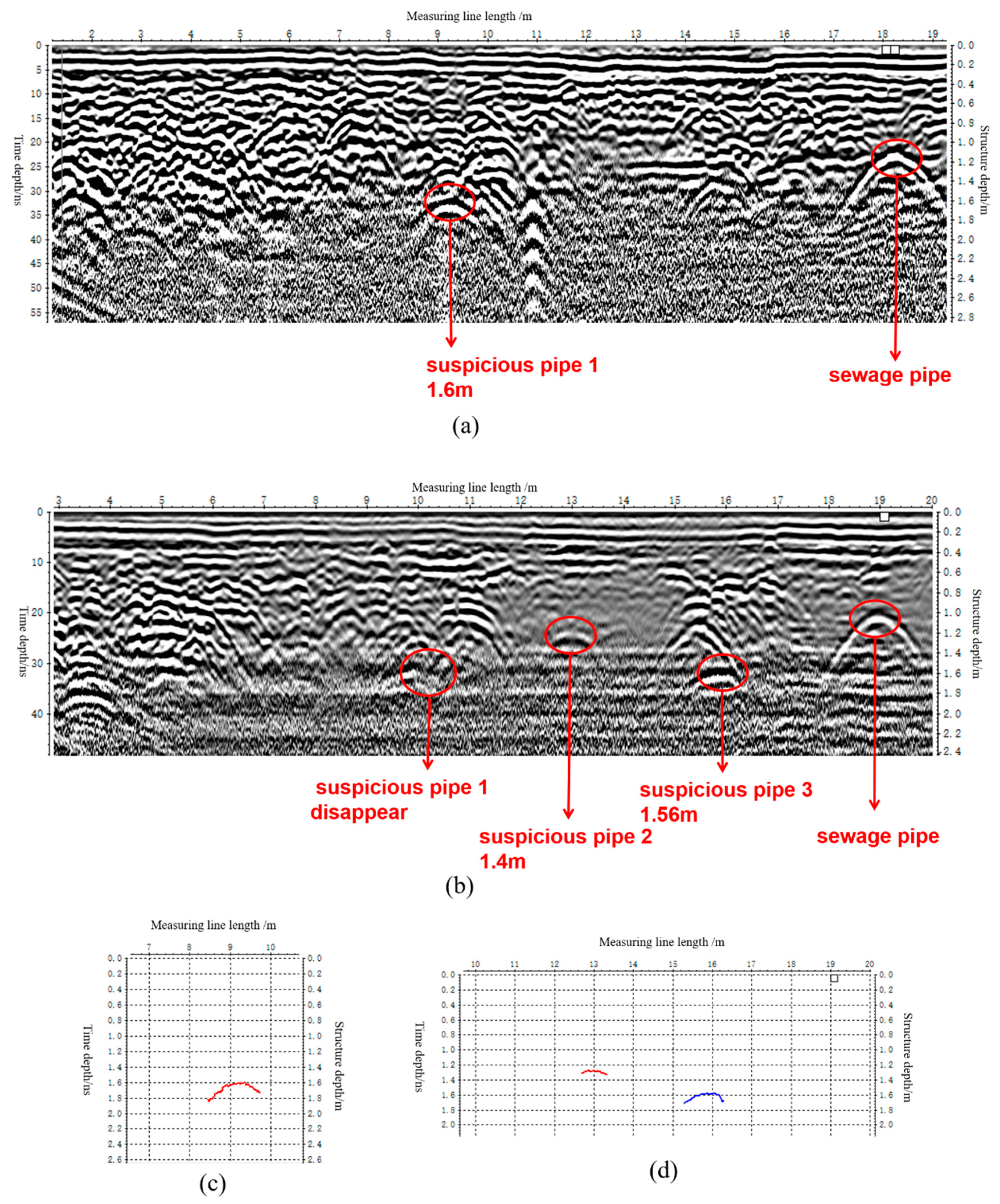
5.3. Inlet Pipe Detection
5.3.1. Inlet Pipe from Wells
5.3.2. Buried Inlet Pipeline
6. Discussion
7. Conclusions
- The acoustic detection method is advantageous in detecting the connectivity between pipes, while the electromagnetic induction method is better at detecting metal pipes. GPR is more effective at detecting both metal pipes (cast iron) and plastic pipes (PE and PVC pipes). However, there are more uncertainties when only using one method alone.
- The acoustic detection method, electromagnetic induction method, GPR method, and knowledge of water consumption can be integrated to validate each other when detecting the position and diameter of complex underground water supply pipelines in the old community.
- Abandoned interferential pipes are the most difficult to be detected in old communities. They require more time to analyze the relationships between different pipes.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lai, W.W.-L.; Dérobert, X.; Annan, P. A review of Ground Penetrating Radar application in civil engineering: A 30-year journey from Locating and Testing to Imaging and Diagnosis. NDT E Int. 2018, 96, 58–78. [Google Scholar]
- Song, Z. Study on Urban Underground Pipeline Planning and Management in China. Master Dissertation, Jilin University, Jilin, China, 2008. Available online: https://kns.cnki.net/KCMS/detail/detail.aspx?dbcode=CMFD&dbname=CMFD2008&filename=2008063704.nh&v=MDkwNTBSdEZ5RGdXcnJLVjEyN0ZyTytIZGJNcTVFYlBJUjhlWDFMdXhZUzdEaDFUM3FUcldNMUZyQ1VSN3FmWmU= (accessed on 8 December 2019).
- Song, K. Analysis of Current Situation and Development Trend of Underground Pipeline Detection in China. Tech. Innov. App. 2017, 35, 184–186. [Google Scholar]
- Canto-Perello, J.; Curiel-Esparza, J. An analysis of utility tunnel viability in urban areas. Civ. Eng. Environ. Syst. 2006, 23, 11–19. [Google Scholar] [CrossRef]
- Ryder, A.A. International Conference on Pipelines and the Environment, held at the Royal Bath Hotel, Bournemouth, England, UK, during 8–10 March 1988. Environ. Conserv. 1988, 15, 279. [Google Scholar] [CrossRef]
- Li, H. Research Progress of Urban Underground Pipeline Detection and Management Technology. Resource Info. Eng. 2018, 33, 142–143. [Google Scholar]
- Perry, W.D.; Haynes, K.E. Prioritizing Regulatory Policy in Pipeline Safety. J. Contingencies Crisis Manag. 1993, 1, 90–100. [Google Scholar] [CrossRef]
- McGrawHill. Incorporated. Pipelines Need Urgent Action. Eng. News-Record 2000, 224, 47. [Google Scholar]
- Fandrich, D. Pipeline Industry Unites To Urge Passage Of Pipeline Safety Legislation. Pipeline Gas J. 2001, 228, 4. [Google Scholar]
- Wigens, L. Development of an England-wide nursing director talent pipeline. Nurs. Manag. (Springhouse) 2018, 49, 51–53. [Google Scholar] [CrossRef]
- Xu, A.; Jiang, H.; Wei, Z. How to Build and Manage the Underground Pipe Network Overseas. China Constr. 2018, 11, 32–35. [Google Scholar]
- Johnson, F. Introduced about 25 years ago in England, ’pipe-bursting’ is just now gaining acceptance in Utah. Enterprise/Salt Lake City 2007, 36, 52. [Google Scholar]
- Xie, Z.; He, J.; Hou, Z. Analysis and Countermeasures of Existing Problems in Urban Underground Pipeline Management. Informatiz. China Constr. 2018, 23, 52–55. [Google Scholar]
- Chen, Q. Analysis of Problems and Countermeasures in the Construction of Urban Underground Pipe Network. Intell. Build. Smart City 2018, 8, 98–99. [Google Scholar]
- Tillard, S.; Dubois, J.C. Analysis of GPR data: wave propagation velocity determination. J. Appl. Geophysics 1995, 33, 77–91. [Google Scholar]
- Van Kempen, L.M.; Sahli, H.; Brooks, J.; Cornelis, J. New Results on Clutter Reduction and Parameter Estimation for Land Mine Detection using GPR; SPIE-Intl Soc Optical Eng.: Vancouver, BC, Canada, 2000; Volume 4084, pp. 872–879. [Google Scholar]
- Pettinelli, E.; Vannaroni, G.; Di Pasquo, B.; Mattei, E.; Di Matteo, A.; De Santis, A.; Annan, P.A. Correlation between near-surface electromagnetic soil parameters and early-time GPR signals: An experimental study. Geophysics 2007, 72, A25–A28. [Google Scholar] [CrossRef]
- Chiarabba, C.; Moretti, M. An insight into the unrest phenomena at the Campi Flegrei caldera from Vp and Vp/Vs tomography. Terra Nova 2006, 18, 373–379. [Google Scholar] [CrossRef]
- Pennock, S.; Jenks, C.; Orlando, G.; Redfern, M. In-pipe GPR Configuration and the Determination of Target Depth and Ground Permittivity; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2012. [Google Scholar]
- Xie, F.; Wu, C.G.-W.; Lai, W.W.-L.; Sham, J.F.C. Correction of multi-frequency GPR wave velocity with distorted hyperbolic reflections from GPR surveys of underground utilities. Tunn. Undergr. Space Technol. 2018, 76, 76–91. [Google Scholar] [CrossRef]
- Wen, J.; Bu, S.; Zhang, L.; Huang, X.; Zhang, Y. Research on the Location of Leakage Points in Metal Water Pipes Based on Attenuation Characteristics of Leakage Sound Waves. Coll. Phys. 2013, 32, 29–32. [Google Scholar]
- Wang, G.F. On underground pipeline census work method. World Nonferrous Met. 2016, 24, 47–49. [Google Scholar]
- Du, L.; Li, X. Application of Fdetection Techniques of Underground Pipelines under Complicated Conditions. Geol. Prospect. 2007, 3, 116–120. [Google Scholar]
- Zhao, X.J.; Zhuo-He, W.U. The Effectiveness of Several Methods for Detection of Short-interval Parallel Pipelines. Geophys. Geochem. Explor. 2004, 42, 17–21. [Google Scholar]
- Meng, W. Discussion on Underground Comprehensive Pipeline Detection in Urban Communities. Beijing Surv. Mapp. 1998, 01, 29–32. [Google Scholar]
- Wang, L.; Zheng-Wen, L.I.; Wang, X.B. A study of Gedogical Radar to cavern detection and physical analogue. Prog. Geophys. 2008, 23, 280–283. [Google Scholar]
- Roberts, R.L.; Daniels, J.J. Modeling near-field GPR in three dimensions using the FDTD method. Geophysics 1997, 62, 1114–1126. [Google Scholar] [CrossRef]
- Hua, L.I.; Guang-Yin, L.U.; Xian-Qi, H.E.; Deng, K. The progress of the GPR and discussion on its future development. Progress Geophys. 2010, 25, 1492–1502. [Google Scholar]
- Meschede, M.; Asprion, U.; Reicherter, K. Visualization of tectonic structures in shallow-depth high-resolution ground-penetrating radar (GPR) profiles. Terra Nova 1997, 9, 167–170. [Google Scholar] [CrossRef]
- Cai, W. Exploration of Underground Pipeline Detection Technology under Complex Condition. Low Carbon World 2016, 29, 109–110. [Google Scholar]
- Grasmueck, M.; Weger, R.; Horstmeyer, H. Full-resolution 3D GPR imaging. Geophysics 2005, 70, K12–K19. [Google Scholar] [CrossRef]
- Grote, K.; Anger, C.; Kelly, B.; Hubbard, S.; Rubin, Y. Characterization of Soil Water Content Variability and Soil Texture using GPR Groundwave Techniques. J. Environ. Eng. Geophys. 2010, 15, 93–110. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Cong, X.; Yang, B.; Wang, X.; Liu, Y.; Li, X. Characteristics Analysis of Radar Map on Underground Pipeline Detection. Progress Geophys. 2018, 34, 1–8. [Google Scholar]
- Electromagnetic Wave Theory. Phys. Today 1955, 8, 33. [CrossRef]
- Rowan, D.J.; Kalff, J.; Rasmussen, J.B. Estimating the Mud Deposition Boundary Depth in Lakes from Wave Theory. Can. J. Fish. Aquat. Sci. 1992, 49, 2490–2497. [Google Scholar] [CrossRef]
- Berkhout, A.J.; Verschuur, D.J. Estimation of multiple scattering by iterative inversion; Part 1, Theoretical considerations. Geophysics 1997, 62, 1586–1595. [Google Scholar] [CrossRef]
- Ayala-Cabrera, D.; Herrera, M.; Izquierdo, J.; Pérez-García, R.; Fernandez, M.H. Location of buried plastic pipes using multi-agent support based on GPR images. J. Appl. Geophys. 2011, 75, 679–686. [Google Scholar] [CrossRef] [Green Version]
- Li, K.; Ma, T.; Feng, Y.; Feng, X. Urban Industrial Water Supply and Demand: System Dynamic Model and Simulation Based on Cobb–Douglas Function. Sustainability 2019, 11, 5893. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Tao, Z.; Yang, J.; Mao, F. The Modified Artificial Fish Swarm Algorithm for Least-Cost Planning of a Regional Water Supply Network Problem. Sustainability 2019, 11, 4121. [Google Scholar] [CrossRef] [Green Version]
- Nakagawa, Y. Taking a Future Generation’s Perspective as a Facilitator of Insight Problem-Solving: Sustainable Water Supply Management. Sustainability 2020, 12, 1000. [Google Scholar] [CrossRef] [Green Version]
- Peng, S. Discussion on the parameter value of calculation formula of hot water system for class III dormitory. Water Wastewater Eng. 2012, 48, 110–111. [Google Scholar]
- Li, L.; Zhang, P. Tianjin Olympic aquatic center water supply system design. Water Wastewater Eng. 2008, 12, 83–86. [Google Scholar]
- Zhao, Q. Design and debugging of water supply system for students’ dormitory in boarding school. Water Wastewater Eng. 2013, 49, 84–86. [Google Scholar]
- Zhao, Q.; Ma, B.; Li, W. Some Opinions on “Discussion on Water Supply Calculation Formulas of New Boarding Institutions in Shanghai”. Water Wastewater Eng. 2005, 11, 79–81. [Google Scholar]
- Terrasse, G.; Nicolas, J.-M.; Trouvé, E.; Drouet, E. Application of the curvelet transform for pipe detection in GPR images. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 13–18 July 2015. [Google Scholar] [CrossRef]
- O’Leary, P.; Zsombor-Murray, P. Direct and specific least-square fitting of hyperbol[ae ligature] and ellipses. J. Elec. Imaging 2004, 13, 492–503. [Google Scholar]
- Shihab, S.; Al-Nuaimy, W. Radius Estimation for Cylindrical Objects Detected by Ground Penetrating Radar. Subsurf. Sens. Technol. Appl. 2005, 6, 151–166. [Google Scholar] [CrossRef]
- Zhang, P.; Guo, X.; Muhammat, N.; Wang, X. Research on probing and predicting the diameter of an underground pipeline by GPR during an operation period. Tunn. Undergr. Space Technol. 2016, 58, 99–108. [Google Scholar] [CrossRef]
- Akritas, M.G.; Roussas, G.G. GPR characterization of buried tanks and pipes. Geophysics 1997, 62, 797–806. [Google Scholar]
- Fu, X. The Characteristics and Application Points of Digital Storage Oscilloscope. Off. Informatiz. 2011, 12, 30–31. [Google Scholar]
- Kim, J.O.; Hwang, K.-K.; Lee, J.-G.; Jeong, H.-G. Cylindrical transducers to generate and detect axisymmetric waves in a pipe. J. Acoust. Soc. Am. 2004, 115, 2575. [Google Scholar] [CrossRef]
- Leighton, T.G.; Ramble, D.G.; Phelps, A.D.; Morfey, C.L.; Harris, P.P. Acoustic Detection of Gas Bubbles in a Pipe. Acta Acust. United Acust. 1998, 84, 801–814. [Google Scholar]
- Mashford, J.; Rahilly, M.; Davis, P. An Approach Using Mathematical Morphology and Support Vector Machines to Detect Features in Pipe Images. In Proceedings of the 2008 Digital Image Computing: Techniques and Applications, Canberra, ACT, Australia, 1–3 December 2008; 2008; pp. 84–89. [Google Scholar]
- Owowo, J.; Oyadiji, S.O. Finite element analysis and experimental measurement of acoustic wave propagation for leakage detection in an air-filled pipe. Int. J. Struct. Integr. 2017, 8, 452–467. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Diameter (mm) | Material | Burial Depth (m) |
|---|---|---|---|
| Pipe A | 100 | PVC (left)/cast iron (right) | 0.8 |
| Pipe B | 200 | PVC | 1.48 |
| Pipe C | 100 | cast iron | 0.85 |
| Pipe D | 150 | cast iron | 0.65 |
| Pipe E | 150 | cast iron | 0.65 |
| Pipe F | 100 | cast iron | 0.8 |
| Pipe G | 100 | cast iron | 0.68 |
| Pipe H | 100 | cast iron | 0.8 |
| Origin of Generated Sound | Test Well/Pipeline | Response | Connection Relationship | |
|---|---|---|---|---|
| Well 1 Pipe A | Well 2 Pipe F | 1 | Pipe A, Pipe F and Pipe H are connected. | |
| Well 3 Pipe H | 0 | |||
| Well 1 Pipe B | Well 2 Pipe F | 0 | Pipe B is not directly connected with Pipe F and Pipe H | |
| Well 3 Pipe H | 0 | |||
| Well 4 Pipe D | Well 5 Pipe E | 1 | Pipe D, Pipe E and Pipe G are connected | |
| Well 6 Pipe G | 1 | |||
| Well 4 Pipe D | Well 5 Pipe E | 0 | Pipe C, Pipe E and Pipe G are connected | |
| Well 6 Pipe G | 0 | |||
| Well 4 Pipe C | Well 1 | 0 | There is no direct connection between Pipe C and pipes in Well 1 and Well 2 | |
| Well 2 Pipe F | 0 | |||
| Well 4 Pipe D | Well1 Pipe A | 1 | Pipe B vibrates obviously, the sound is clearer | Pipe A is connected to Pipe D through Pipe B |
| Well1 Pipe B | 1 | |||
| Well 5 Pipe E | Well1 | 0 | The pipes in Well 5 and Well 6 are not directly connected with those in Well 1 and Well 2 | |
| Well 2 F | 0 | |||
| Well 6 Pipe G | Well 1 | 0 | ||
| Well 2 F | 0 | |||
| Plumbing Fixture | Number of Fixtures (a) | Flow Rate (L/S) | Percentage of Simultaneous Water Supply |
|---|---|---|---|
| Pedestal pan | 2 | 0.10 | 50 |
| Squatting pan | 12 | 1.20 | 50 |
| mop tub | 9 | 0.15 | 60 |
| urinal | 5 | 0.10 | 50 |
| washbasin | 10 | 0.15 | 60 |
| Kitchen Fixture | Number of Fixtures (a) | Flow Rate (L/S) |
|---|---|---|
| Single sink table | 10 | 0.15 |
| Hand wash sink Cabinet | 5 | 0.15 |
| Big wok rang | 7 | 0.10 |
| wok rang | 7 | 0.10 |
| Drain type soup stove | 7 | 0.20 |
| 1-door steam cabinet | 8 | 0.20 |
| Hookah hood control box | 8 | 0.10 |
| 3-head noodle cooker | 7 | 0.15 |
| Bain marie cabinet | 10 | 0.20 |
| Water heater | 10 | 0.20 |
| Big single sink table | 8 | 0.20 |
| Reel kleen unit | 8 | 0.20 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, S.; Ma, S.; Zhang, X.; Zhang, S. Integrated Detection of a Complex Underground Water Supply Pipeline System in an Old Urban Community in China. Sustainability 2020, 12, 1670. https://doi.org/10.3390/su12041670
Deng S, Ma S, Zhang X, Zhang S. Integrated Detection of a Complex Underground Water Supply Pipeline System in an Old Urban Community in China. Sustainability. 2020; 12(4):1670. https://doi.org/10.3390/su12041670
Chicago/Turabian StyleDeng, Shifan, Siyu Ma, Xiaowen Zhang, and Shiqiang Zhang. 2020. "Integrated Detection of a Complex Underground Water Supply Pipeline System in an Old Urban Community in China" Sustainability 12, no. 4: 1670. https://doi.org/10.3390/su12041670
APA StyleDeng, S., Ma, S., Zhang, X., & Zhang, S. (2020). Integrated Detection of a Complex Underground Water Supply Pipeline System in an Old Urban Community in China. Sustainability, 12(4), 1670. https://doi.org/10.3390/su12041670