
Lane-Level Map-Aiding Approach Based on Non-Lane-Level Digital Map Data in Road Transport Security



Abstract
:1. Introduction
2. Potential Applications of the Lane-Level Map-Aiding Approach and the Project TransSec
2.1. Potential Applications of the Lane-Level Map-Aiding Approach
2.2. Project TransSec
3. Map-Supported Positioning
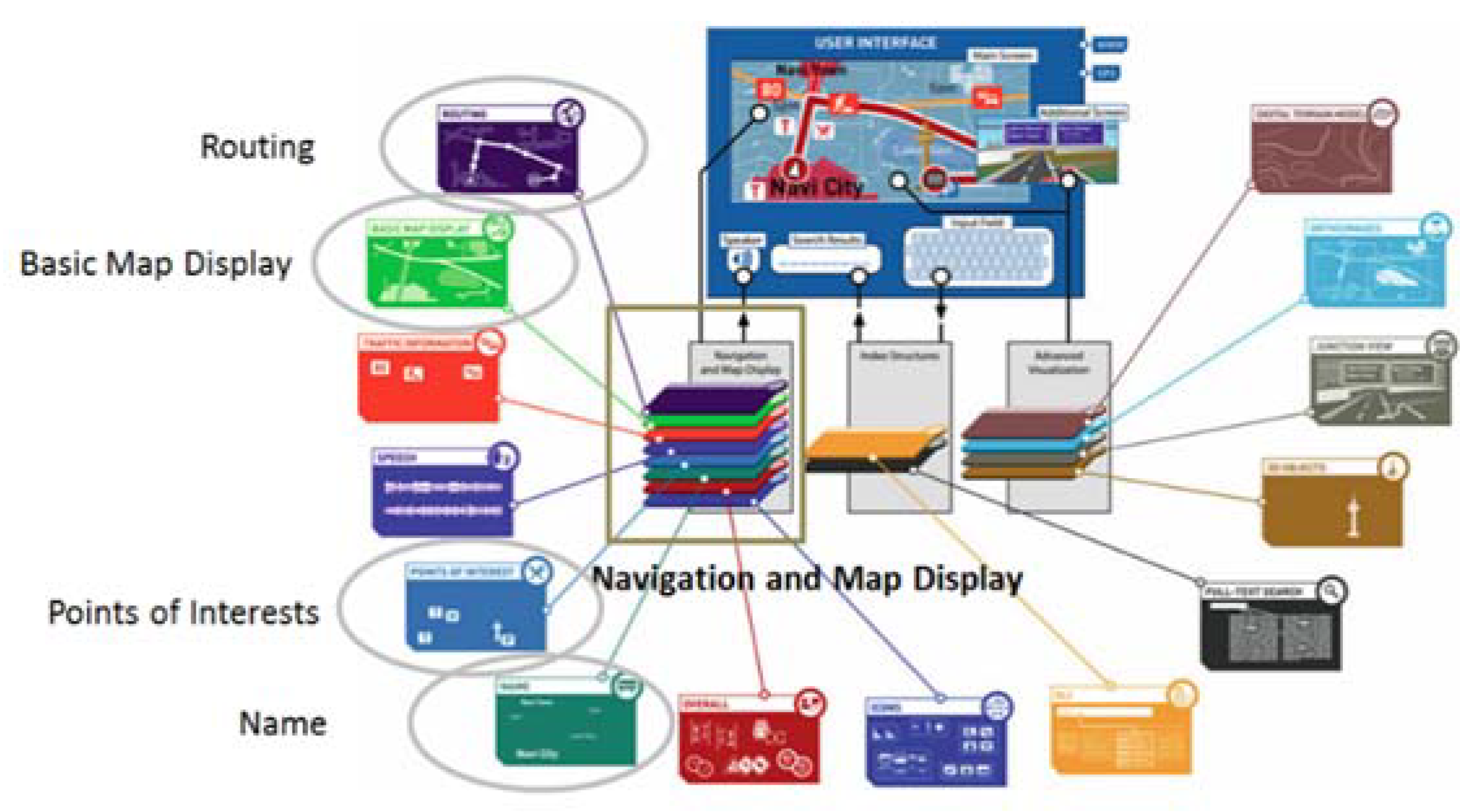
3.1. Digital Road Map
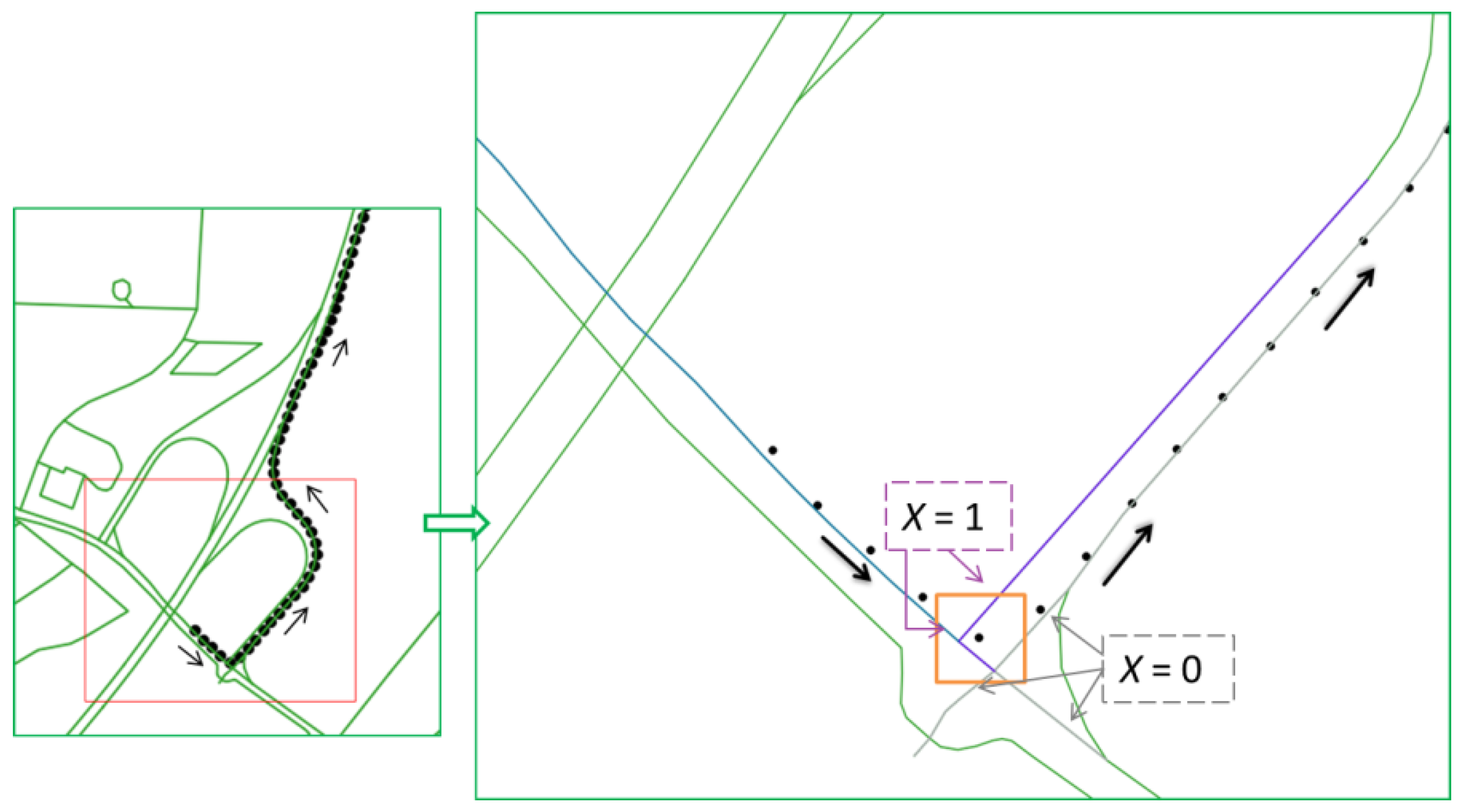
3.2. Basics of Map-Matching
3.3. Map-Matching Criteria and Total Weighting Score (TWS)
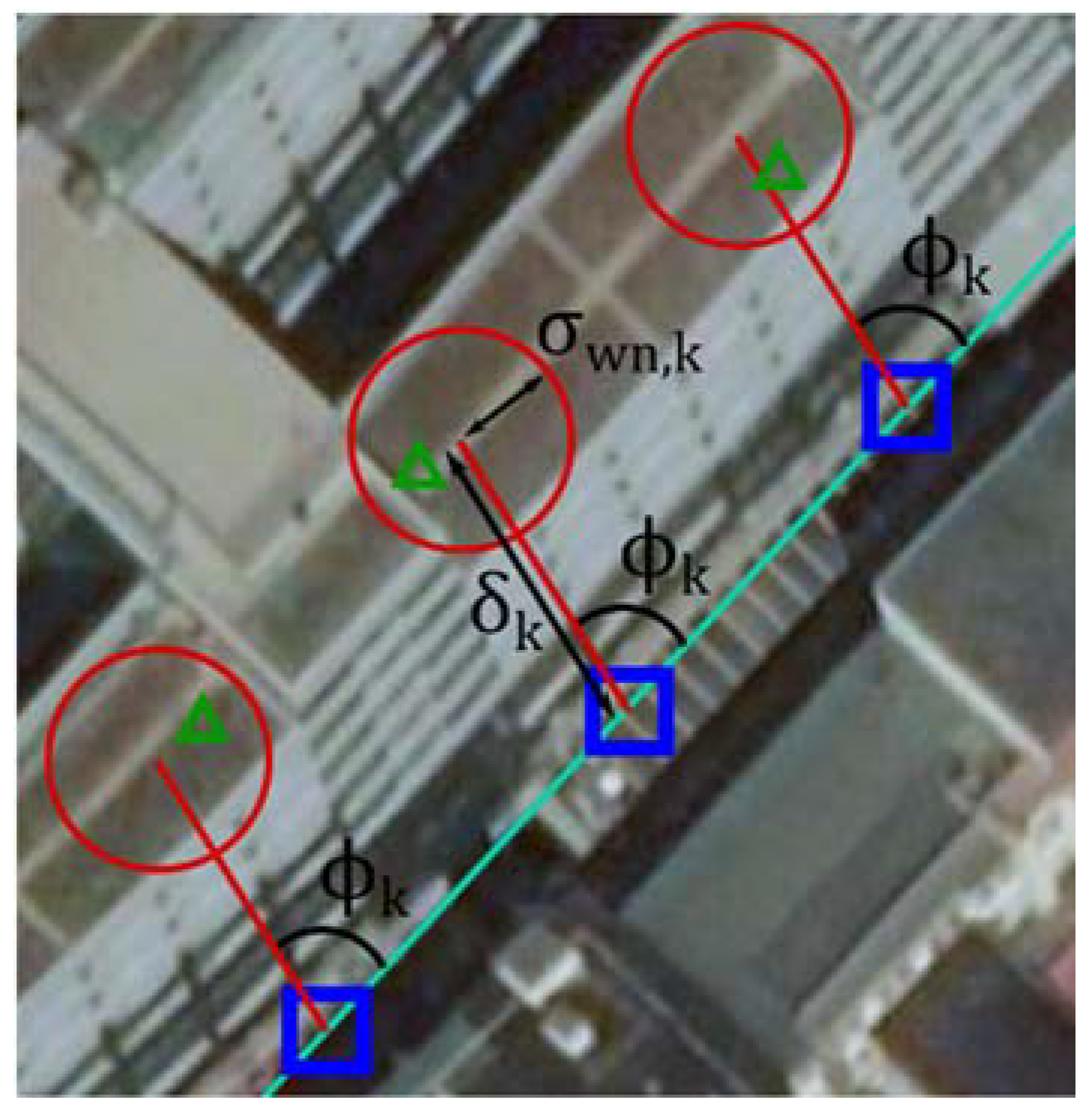
3.3.1. Map-Matching Criteria
3.3.2. Total Weighting Score (TWS)
4. Map-Supported Positioning
4.1. Data Availability and Quality Analysis
4.2. Map-Aiding Approach
- (1)
- step 1: search for road candidate based on a well-defined weighting-function according to Equation (5) in Section 3.3.2,
- (2)
- step 2: identification of the road link with the highest TWS (reference link),
- (3)
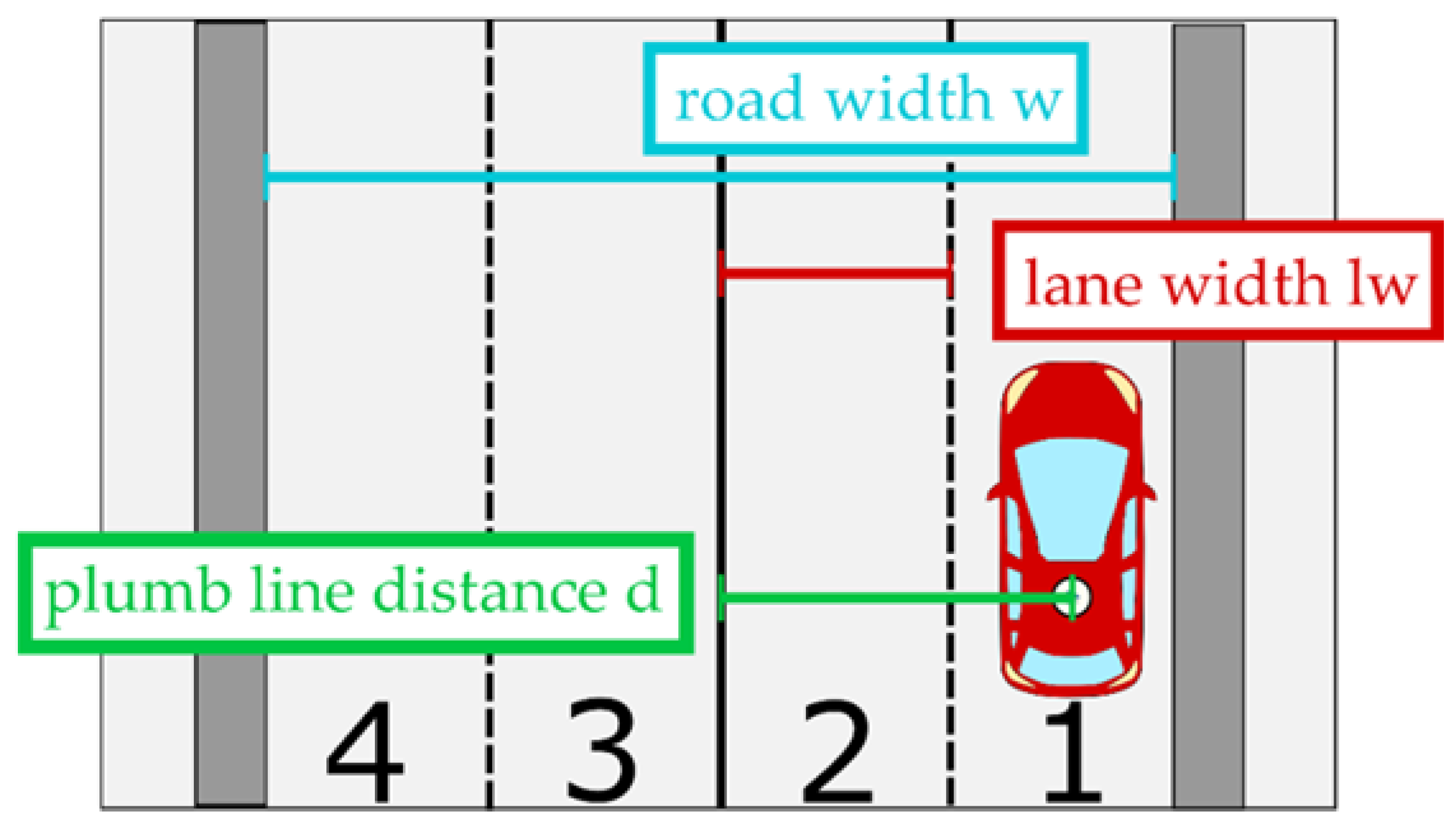
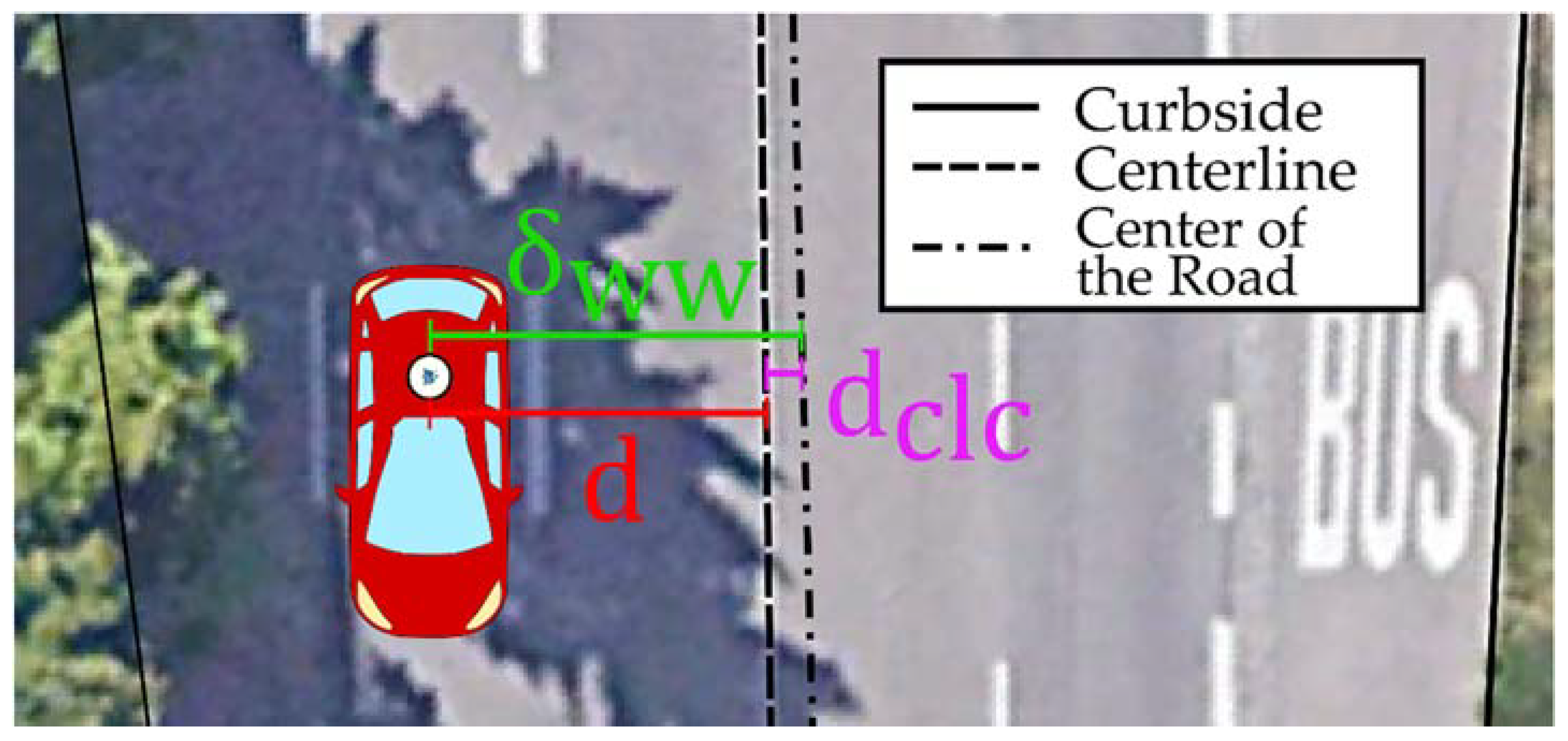
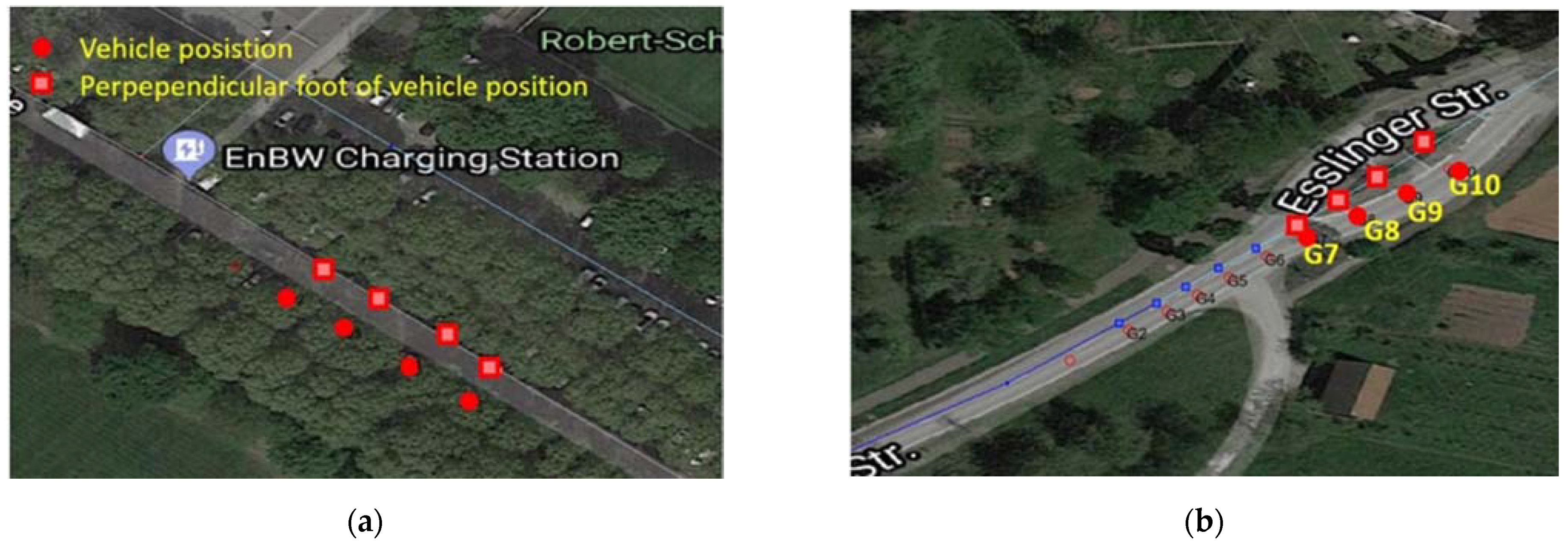
- step 3: computation of the lateral position deviation d from the vehicle position to the identified road link (reference link),
- (4)
- Step 4: on-/off-road detection including a comparison of probability estimation (see Section 4.3),
- (5)
- step 5: identification of the lane on which the vehicle is travelling; wrong-way driver detection including probability estimation (see Section 4.4),
- (6)
- step 6: provide all necessary results (e.g., speed limit and direction of traffic flow, link type and number of lanes) of the reference link to identify potential risks.
- (1)
- The identification on which lane the vehicle is actually traveling is added.
- (2)
- The probability estimation of the on-/off-road or the wrong-way driver is added.
- (3)
- Multiple road links are provided (if needed).
4.3. On-/Off-Road Detection including Probability Estimation
4.4. Wrong-Way Driver Detection including Probability Estimation
4.4.1. Road Link with Attribute “One-Way”
4.4.2. Road Link with Attribute “Two-Way”
Case: Even Number of Lanes
Case: Odd Number of Lanes
4.4.3. Wrong-Way Driver Alert
5. Evaluation
5.1. Test Scenario
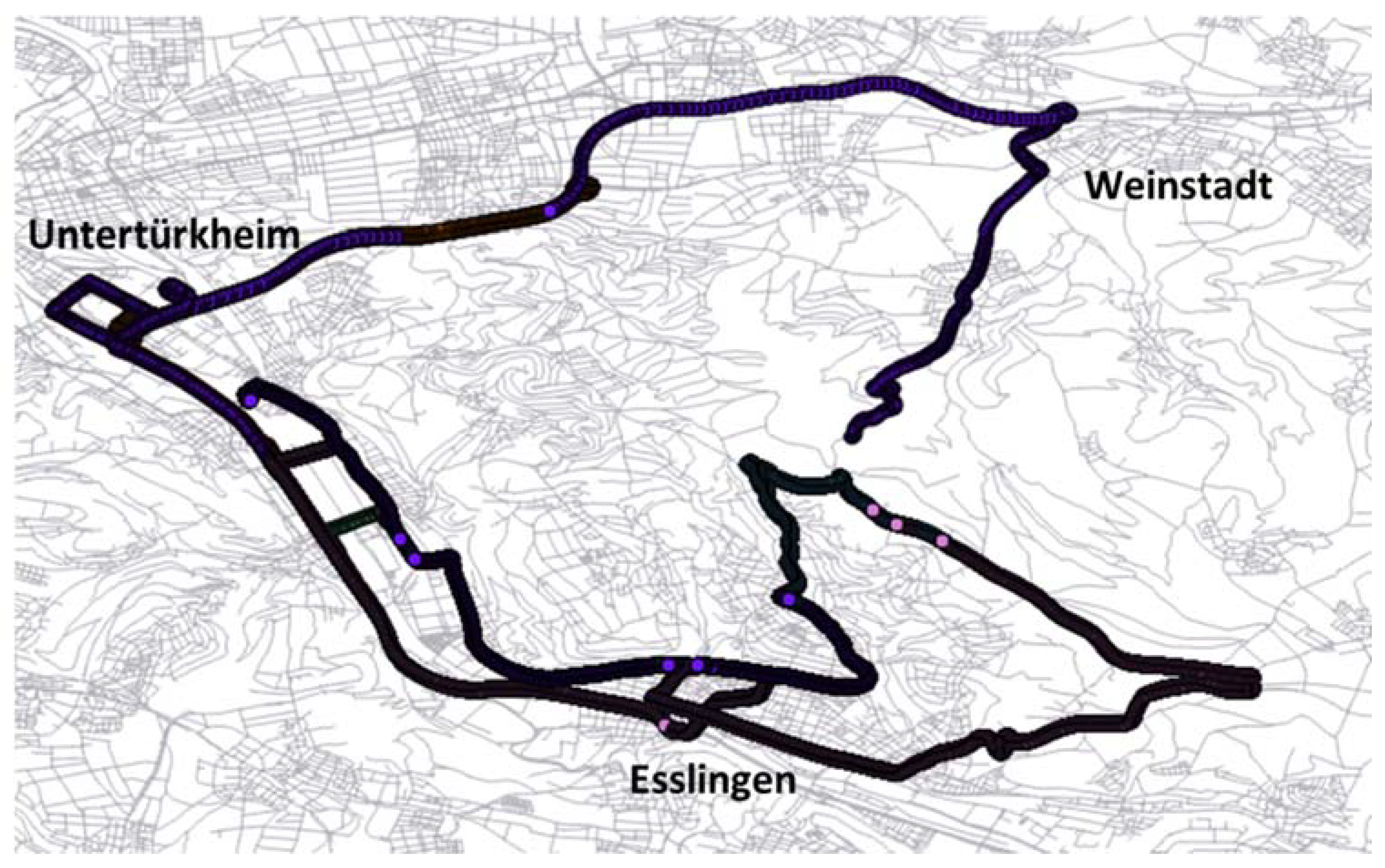
5.1.1. Real Trajectories
5.1.2. Simulated Trajectories
5.2. Results
5.2.1. Results of Real Trajectories
5.2.2. Results of Simulated Trajectories
5.3. Analysis
6. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, J.; Wachsmuth, M.; Metzner, M.; Schwieger, V. Die digitale Karte als Sensor. In MST 2018—Multisensortechnologie: Low-Cost Sensoren im Verbund: Proceedings of the 176. DVW-Seminar, Hamburg, Germany, 13–14 September 2018; Wißner Verlag: Augsburg, Germany, 2018; pp. 137–166. [Google Scholar]
- Kim, K.; Seol, S.; Kong, S. High-speed train navigation system based on multi-sensor data fusion and map matching algorithm. Int. J. Control Autom. Syst. 2015, 13, 503–512. [Google Scholar] [CrossRef]
- Wang, P.; Li, W.; Wang, X.; Chu, X. The Method of Train Positioning Based on Digital Track Map Matching. MATEC Web Conf. 2018, 246, 03024. [Google Scholar] [CrossRef]
- Safe Road Transport Roadmap towards Vision Zero: Roads without Victims. ERTRAC Working Group: Road Transport Safety & Security. Available online: https://www.ertrac.org/uploads/documentsearch/id58/ERTRAC-Road-Safety-Roadmap-2019.pdf (accessed on 29 July 2021).
- Pappalardo, G.; Cafiso, S.; Di Graziano, A.; Severino, A. Decision Tree Method to Analyze the Performance of Lane Support Systems. Sustainability 2021, 13, 846. [Google Scholar] [CrossRef]
- Luz, P.; Metzner, M.; Schwieger, V. Development of a new lane-precise map matching algorithm using GNSS considering road connectivity. In Proceedings of the Virtual ITS European Congress 2020, Online, 9–10 November 2020. [Google Scholar]
- Nice Truck Attack. Available online: https://en.wikipedia.org/wiki/2016_Nice_truck_attack (accessed on 30 July 2021).
- Berlin Truck Attack. Available online: https://en.wikipedia.org/wiki/2016_Berlin_truck_attack (accessed on 30 July 2021).
- Vehicle-Ramming Attack. Available online: https://en.wikipedia.org/wiki/Vehicle-ramming_attack (accessed on 30 July 2021).
- TransSec Website. Available online: http://www.transsec.eu/ (accessed on 23 July 2020).
- TransSec Deliverable D2.1 Requirements for Positioning Quality. Available online: http://www.transsec.eu/public-deliverables/ (accessed on 6 January 2020).
- Wachsmuth, M.; Koppert, A.; Zhang, L.; Schwieger, V. Development of an error-state Kalman Filter for Emergency Maneuvering of Trucks. In Proceedings of the European Navigation Conference, Online, 23–24 November 2020. [Google Scholar]
- ISO. ISO/TR 17424. ISO/TR 17424:2015 Intelligent Transport Systems—Cooperative Systems—State of the Art of Local Dynamic Maps Concepts; ISO: Geneva, Switzerland, 2015. [Google Scholar]
- Eskandarian, A. Handbook of Intelligent Vehicles, 1st ed.; Springer: London, UK, 2012; Volume 2. [Google Scholar]
- Liu, R.; Wang, J.; Zhang, B. High Definition Map for Automated Driving: Overview and Analysis. J. Navig. 2020, 73, 324–341. [Google Scholar] [CrossRef]
- Ehmke, J. Integration of Information and Optimization Models for Routing in City Logistics, 1st ed.; Springer: New York, NY, USA, 2012. [Google Scholar]
- ISO. ISO 20524-1:2020 Intelligent Transport Systems—Geographic Data Files (GDF) GDF5.1—Part 1: Application Independent Map Data Shared between Multiple Sources; ISO: Geneva, Switzerland, 2020. [Google Scholar]
- NDS Website. Available online: https://nds-association.org/ (accessed on 6 April 2021).
- OpenDRIVE Website. Available online: https://www.asam.net/standards/detail/opendrive/ (accessed on 6 April 2021).
- Kleine-Besten, T.; Behres, R.; Pöchmüller, W.; Engelsberg, A. Digital Maps for ADAS. In Handbook of Driver Assistance Systems, 1st ed.; Winner, H., Hakuli, S., Lotz, F., Singer, C., Eds.; Springer International Publishing: Basel, Switzerland, 2016; Volume 26. [Google Scholar]
- NDS Version 2.4.2. Navigation Data Standard Format Specification, NDS Version 2.4.2; NDS e.V.: Gries, Germany, 2015. [Google Scholar]
- Beckmann, H.; Frankl, K.; Wang, J.; Metzner, M.; Schwieger, V.; Eissfeller, B. Real-world vehicle tests for determining the minimum time of detection for wrong-way driving on highways. In Proceedings of the Navitec Conference, Noordwijk, The Netherlands, 14–16 December 2016. [Google Scholar]
- Quddus, M.; Ochieng, W.Y.; Noland, R.B. Current Map-Matching algorithms for transport applications: State-of-the art and future research directions. Transp. Res. Part C Emerg. Technol. 2007, 15, 312–328. [Google Scholar] [CrossRef] [Green Version]
- Velaga, N.; Quddus, M.; Bristow, A. Developing an enhanced weight-based topological Map-Matching algorithm for intelligent transport systems. Transp. Res. Part C Emerg. Technol. 2009, 17, 672–683. [Google Scholar] [CrossRef] [Green Version]
- Velaga, N.; Quddus, M.; Bristow, A. Detecting and Correcting Map-Matching Errors in Location-Based Intelligent Transport Systems. In Proceedings of the 12th World Conference on Transport Research, Lisbon, Portugal, 11–15 July 2010. [Google Scholar]
- Abdallah, F.; Nassreddine, G.; Denoeux, T. A multiple-hypotheses map matching method suitable for weighted and box-shaped state estimation for localization. IEEE Trans. Intell. Transp. Syst. Symp. 2011, 12, 1495–1510. [Google Scholar] [CrossRef]
- Blazquez, C. A Decision-Rule Topological Map-Matching Algorithm with Multiple Spatial Data. In Global Navigation Satellite Systems: Signal, Theory and Applications, 1st ed.; Shuanggen, J., Ed.; InTechOpen: London, UK, 2012; pp. 215–240. [Google Scholar]
- Quddus, M.; Washington, S. Shortest path and vehicle trajectory aided Map-Matching for low frequency GPS data. Transp. Res. Part C Emerg. Technol. 2015, 55, 328–339. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Metzner, M.; Schwieger, V. Weighting-function based Map-Matching algorithm for a reliable wrong-way driving detection. In Proceedings of the 12th ITS European Congress, Strasbourg, France, 19–22 June 2017. [Google Scholar]
- Bernstein, D.; Kornhauser, A. An Introduction to Map Matching for Personal Navigation Assistants; New Jersey TIDE Center, Princeton University: Newark, NJ, USA, 1996. [Google Scholar]
- Czommer, R. Leistungsfähigkeit Fahrzeugautonomer Ortungsverfahren auf der Basis von Map-Matching-Techniken. Ph.D. Thesis, University of Stuttgart, Stuttgart, Germany, 2000. [Google Scholar]
- Röhrig, C.; Büchter, H.; Kirsch, C. Monte Carlo Lokalisierung Fahrerloser Transportfahrzeuge mit drahtlosen Sensornetzwerken. In Autonome Mobile Systeme 2009, 1st ed.; Dillmann, R., Beyerer, J., Stiller, C., Zöllner, J.M., Gindele, T., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 161–168. [Google Scholar] [CrossRef]
- Ochieng, W.Y.; Quddus, M.A.; Noland, R.B. Map-Matching in complex urban road networks. Braz. J. Cartogr. 2003, 55, 1–18. [Google Scholar]
- Hashemi, M.; Karimi, H.A. A weight-based map-matching algorithm for vehicle navigation in complex urban networks. J. Intell. Transp. Syst. 2016, 20, 573–590. [Google Scholar] [CrossRef]
- Krumm, J.; Letchner, J.; Horvitz, E. Map Matching with Travel Time Constraints. Available online: www.microsoft.com/en-us/research/publication/Map-Matching-travel-time-constraints (accessed on 14 April 2021).
- Kuhnt, F.; Kohlhaas, R.; Jordan, R.; Gußner, T.; Gumpp, T.; Schamm, T.; Zöllner, J.M. Particle filter map matching and trajectory prediction using a spline based intersection model. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 1892–1893. [Google Scholar] [CrossRef]
- Luo, A.; Chen, S.; Xv, B. Enhanced Map-Matching Algorithm with a Hidden Markov Model for Mobile Phone Positioning. ISPRS Int. J. Geo Inf. 2017, 6, 327. [Google Scholar] [CrossRef] [Green Version]
- Li, F.; Bonnifait, P.; Ibanez-Guzman, J.; Zinoune, C. Lane-level Map-Matching with integrity on high-definition maps. In Proceedings of the IEEE Intelligent Vehicle Symposium (IV2017), Los Angeles, CA, USA, 11–14 June 2017; pp. 1176–1181. [Google Scholar]
- Heidrich, W.A.; Schulze, M.; Kessel, M.; Werner, M. Robustes Mapmatching Hochaufgelöster, Fahrzeugbasierter GPS-Tracks. Available online: www.martinwerner.de/pdf/MAPMATCH.pdf (accessed on 14 April 2021).
- Romon, S.; Bressaud, X.; Lassarre, S.; Pierre, G.S.; Khoudour, L. Map-Matching Algorithm for Large Databases. J. Navig. 2015, 68, 971–988. [Google Scholar] [CrossRef] [Green Version]
- Tang, J.; Zhang, S.; Zou, Y.; Liu, F. An Adaptive Map-Matching Algorithm Based on Hierarchical Fuzzy System from Vehicular GPS Data. Available online: http://journals.plos.org/plosone/article?id=10.1371/journal.pone.0188796 (accessed on 14 April 2021).
- Rabe, J.; Meinke, M.; Necker, M.; Stiller, C. Lane-level Map-Matching based on optimization. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 1155–1160. [Google Scholar] [CrossRef]
- Sharath, M.; Velaga, N.R.; Quddus, M.A. A dynamic two-dimensional (D2D) weight-based Map-Matching algorithm. Transp. Res. Part C Emerg. Technol. 2019, 98, 409–432. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, J.; Wachsmuth, M.; Gasparac, M.; Trauter, R.; Schwieger, V. Role of Digital Maps in Road Transport Security. In Proceedings of the FIG Working Week 2019, Hanoi, Vietnam, 22–26 April 2019. [Google Scholar]
- Rooch, A. Statistik für Ingenieure: Wahrscheinlichkeitsrechnung und Datenauswertung Endlich Verständlich, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar] [CrossRef]
- Trimble BX982. Available online: https://oemgnss.trimble.com/product/trimble-bx982/ (accessed on 10 April 2021).
- TransSec. Deliverable 3.4: Map Aiding. Project TransSec, WP3; Confidential Project Report; University of Stuttgart: Stuttgart, Germany, 2020. [Google Scholar]
- Ramm, K.; Schwieger, V. Multisensorortung für Kraftfahrzeuge. In Kinematische Messmethoden—Vermessung in Bewegung: Proceedings of the 58. DVW-Seminar, Stuttgart, Germany, 17–18 February 2004; Wißner Verlag: Augsburg, Germany, 2004. [Google Scholar]
- Eichhorn, E. Ein Beitrag zur Identifikation von Dynamischen Strukturmodellen mit Methoden der Adaptiven Kalman-Filterung. Ph.D. Thesis, University of Stuttgart, Stuttgart, Germany, 2000. [Google Scholar]
- Zhang, L.; Schwieger, V. Reducing multipath effect of low-cost GNSS receivers for monitoring by considering temporal correlations. J. Appl. Geod. 2014, 14, 167–175. [Google Scholar] [CrossRef]
- Niemeier, W. Ausgleichungsrechnung: Statistische Auswertemethoden, 2nd ed.; de Gruyter: Berlin, Germany, 2008. [Google Scholar]
- Sachs, L. Angewandte Statistik, 17th ed.; Springer: Berlin/Heidelberg, Germany, 2004. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Driving Maneuvers | Cases | Number of Positions | Number of Road Links |
|---|---|---|---|
| Regular drives | - | 160,261 | 3124 |
| Off-road drives | - | 4173 | 42 |
| Wrong-way driver drives | One-way road | 1237 | 41 |
| Oncoming traffic | 1226 | 45 | |
| Closed road | 382 | 22 |
| Actual: Yes | Actual: No | |
|---|---|---|
| Predicted: Yes | - | 344 |
| Predicted: No | - | 27,108 |
| Actual: Yes | Actual: No | |
|---|---|---|
| Predicted: Yes | - | 95 |
| Predicted: No | - | 27,357 |
| Actual: Yes | Actual: No | Actual: Yes | Actual: No | Actual: Yes | Actual: No | |
|---|---|---|---|---|---|---|
| Predicted: Yes | 4168 | 1582 | 4165 | 1826 | 4158 | 1956 |
| Predicted: No | 5 | 161,524 | 8 | 161,280 | 15 | 161,150 |
| Actual: Yes | Actual: No | Actual: Yes | Actual: No | Actual: Yes | Actual: No | |
|---|---|---|---|---|---|---|
| Predicted: Yes | 2842 | 228 | 2834 | 465 | 2821 | 456 |
| Predicted: No | 3 | 164,206 | 11 | 1,639,969 | 24 | 163,978 |
| Off-road detection | False positive rate [%] | 0.970 | 1.120 | 1.199 |
| Sensitivity [%] | 99.904 | 99.808 | 99.640 | |
| Wrong-way driver detection | False positive rate [%] | 0.139 | 0.283 | 0.278 |
| Sensitivity [%] | 99.894 | 99.613 | 99.156 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luz, P.; Zhang, L.; Wang, J.; Schwieger, V. Lane-Level Map-Aiding Approach Based on Non-Lane-Level Digital Map Data in Road Transport Security. Sustainability 2021, 13, 9724. https://doi.org/10.3390/su13179724
Luz P, Zhang L, Wang J, Schwieger V. Lane-Level Map-Aiding Approach Based on Non-Lane-Level Digital Map Data in Road Transport Security. Sustainability. 2021; 13(17):9724. https://doi.org/10.3390/su13179724
Chicago/Turabian StyleLuz, Philipp, Li Zhang, Jinyue Wang, and Volker Schwieger. 2021. "Lane-Level Map-Aiding Approach Based on Non-Lane-Level Digital Map Data in Road Transport Security" Sustainability 13, no. 17: 9724. https://doi.org/10.3390/su13179724
APA StyleLuz, P., Zhang, L., Wang, J., & Schwieger, V. (2021). Lane-Level Map-Aiding Approach Based on Non-Lane-Level Digital Map Data in Road Transport Security. Sustainability, 13(17), 9724. https://doi.org/10.3390/su13179724