
“Everything Somewhere” or “Something Everywhere”: Examining the Implications of Automated Vehicles’ Deployment Strategies




Abstract
:1. Introduction
- reviewing the different strategies regarding their deployment,
- applying them in a common type of intersection, and
- identifying the potential benefits, barriers, and implications of each strategy.
2. Materials and Methods
2.1. Road Infrastructure Requirements for Automated Vehicles
- road AND (infrastructure OR geometry OR design) AND (“automated vehicle*” OR “autonomous vehicle*” OR “automated car*” OR “autonomous car*” OR “driver-less vehicle*” OR “self-driving vehicle*” OR “driver-less car*” OR “self-driving car*” OR “driverless vehicle*” OR “driverless car*” OR “automated driving” OR “autonomous driving”)
2.2. Modelling of Automated Vehicles’ Driving Behavior
2.3. Traffic Model Development
2.4. Scenarios—Implementation Strategies
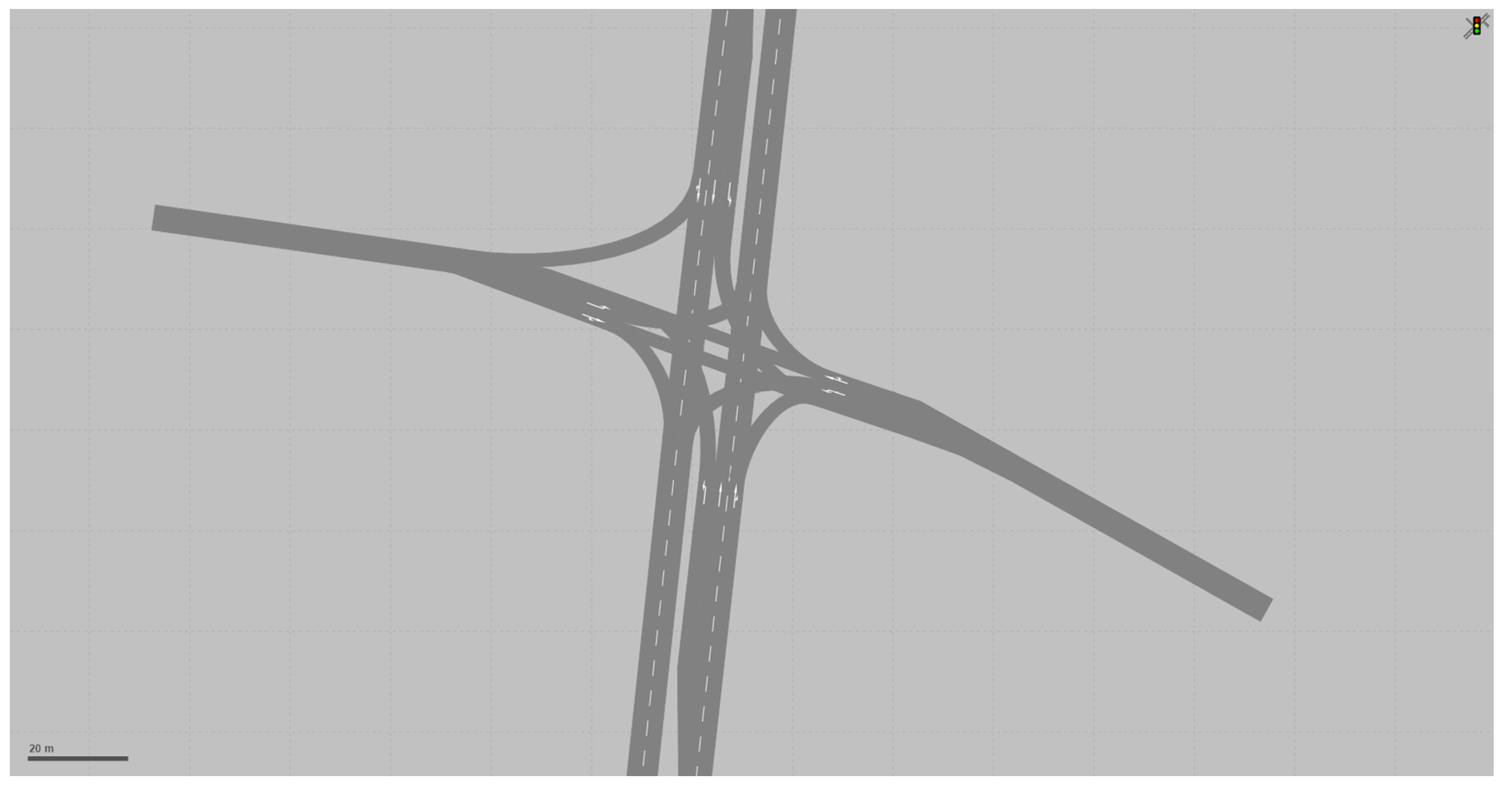
- The existing intersection to examine the “something everywhere” strategy by exploring the interactions of AVs and no-AVs in common traffic conditions in Belgium, i.e., a do-nothing scenario with no requirements or public investment where AVs and no-AVs co-exist;
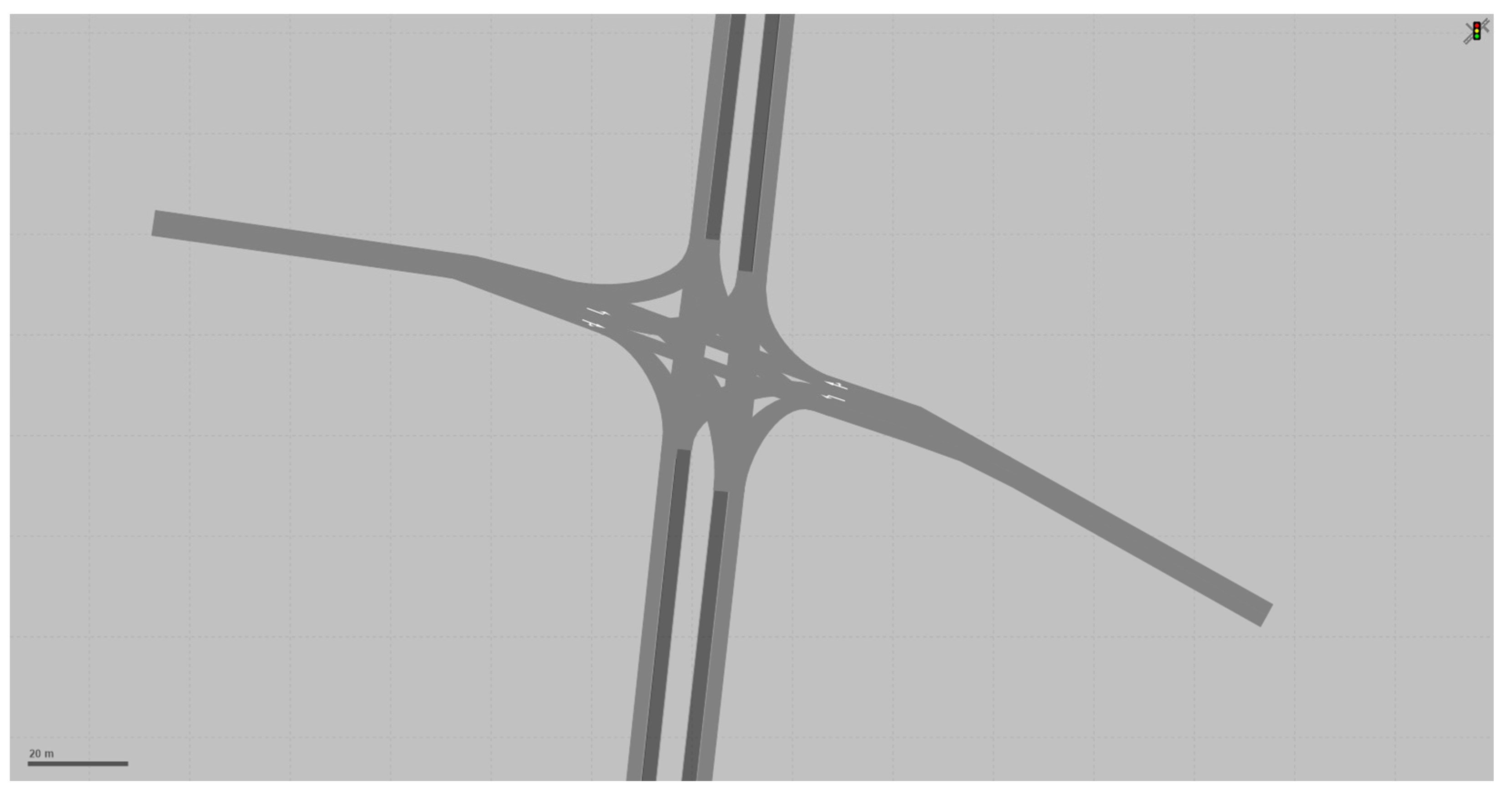
- A modified intersection based on the literature review findings that could be considered appropriate for the “everything somewhere” strategy, i.e., a basic-adjustment scenario (short-term implementation scenario with no-AVs still available to the public), where minimum requirements are applied to ensure traffic safety, with minimum/no public investment.
3. Results
3.1. Road Infrastructure Requirements for AVs
3.2. Modeling AV’s Driving Behavior
3.3. Scenarios—Implementation Strategies
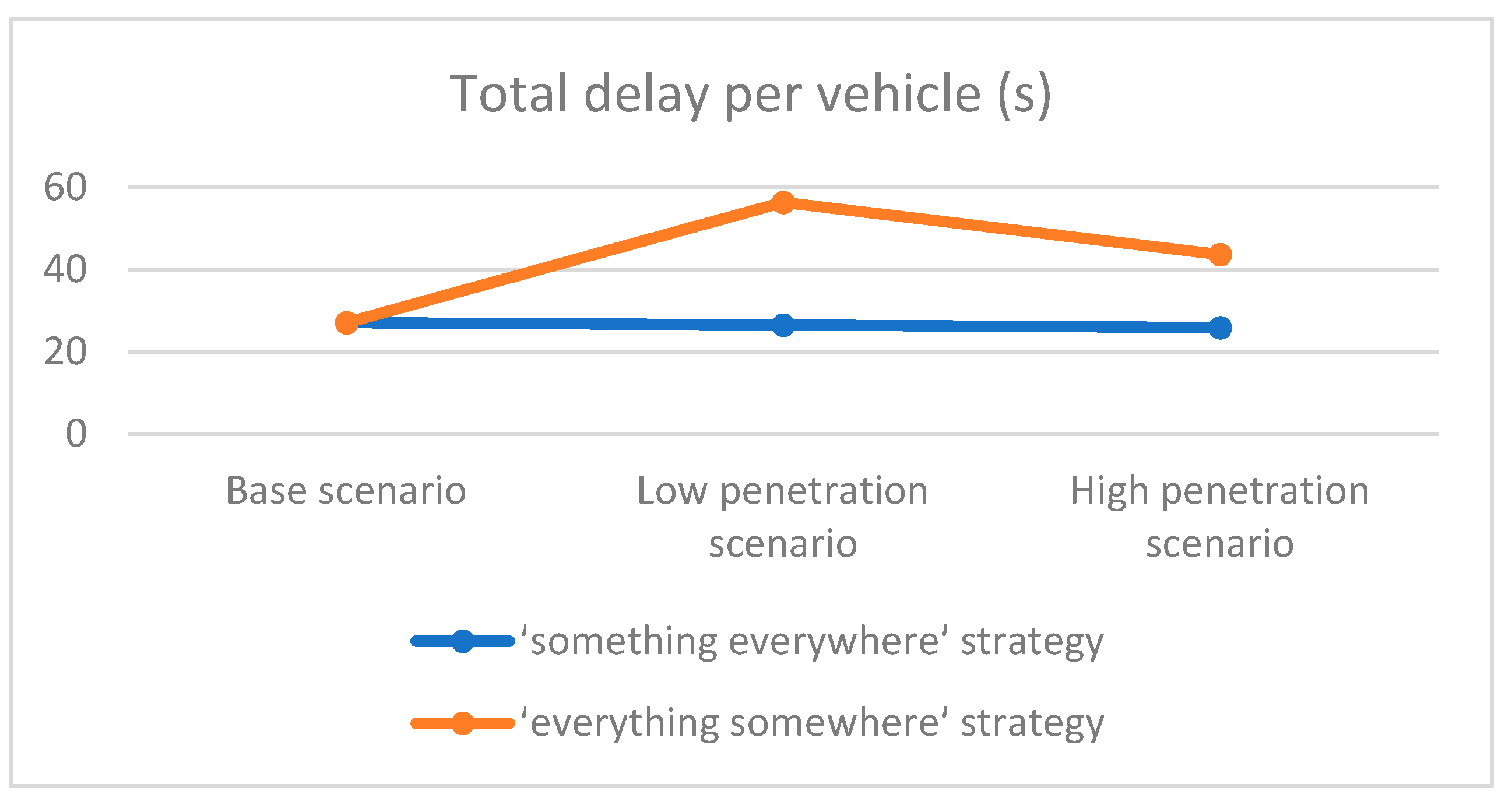
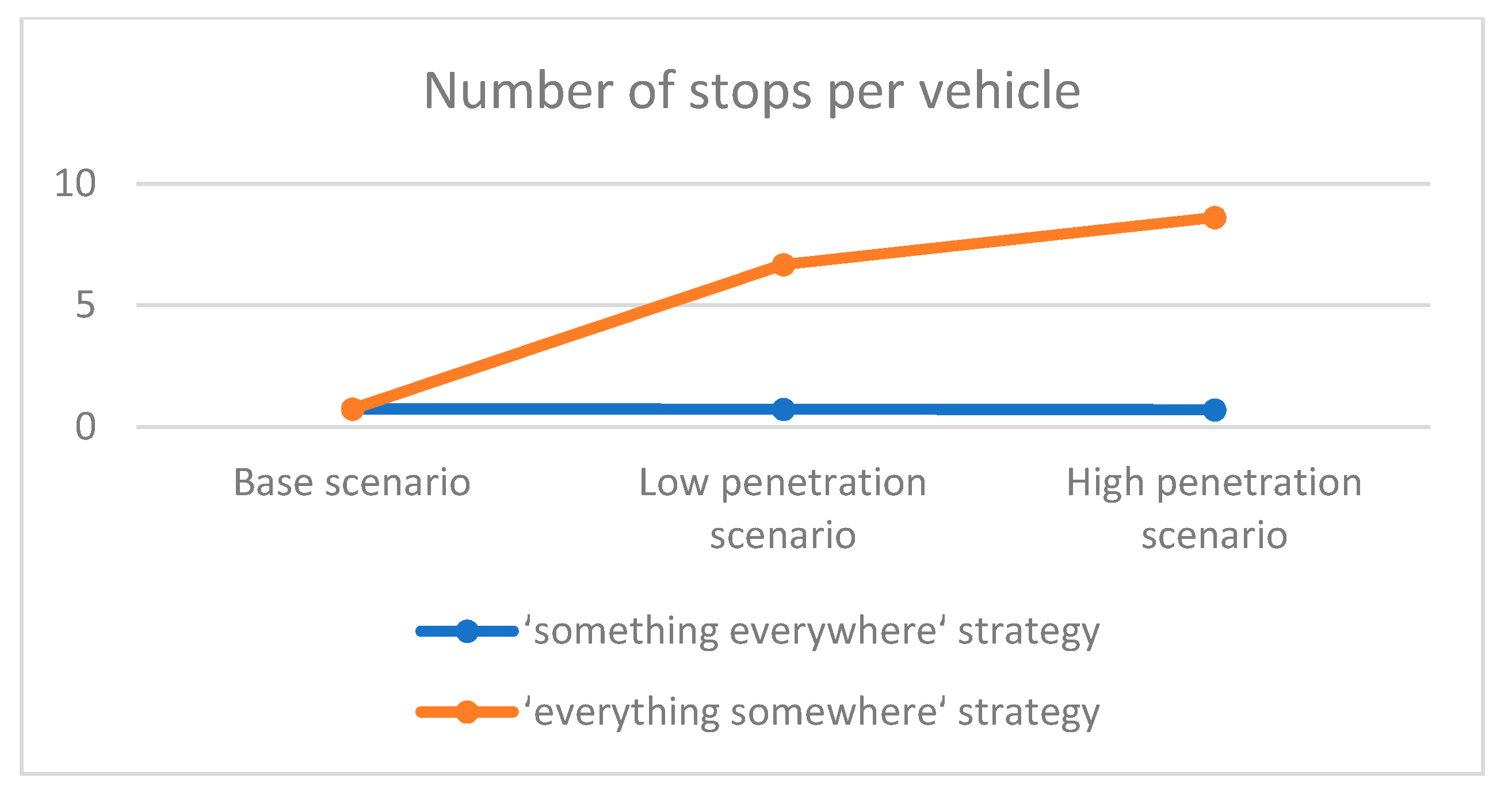
3.4. Traffic Micro-Simulation Results
- Total delay per vehicle;
- Stop delay per vehicle;
- Average queue length; and
- Level of service (LOS).
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Clarke, A.C. Hazards of Prophecy: The Failure of Imagination. In Profiles of the Future: An Inquiry into the Limits of the Possible; Harper & Row: New York, NY, USA, 1962; pp. 14, 21, 36. [Google Scholar]
- ITF (International Transport Forum). Automated and Autonomous Driving: Regulation under Uncertainty; OECD (Organization for Economic Co-operation and Development): Paris, France, 2015. [Google Scholar]
- SAE International. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. In Surface Vehicle Recommended Practice J3016TM; SAE International: Warrendale, PA, USA, 2014. [Google Scholar]
- Farah, H.; Erkens, S.; Alkim, T.; Arem, B. Infrastructure for Automated and Connected Driving: State of the Art and Future Research Directions. In Road Vehicle Automation 4: Lecture Notes in Mobility; Meyer, G., Beiker, S., Eds.; Springer International Publishing AG: New York, NY, USA, 2018; pp. 187–197. [Google Scholar]
- Shladover, S.E.; Bishop, R. Road Transport Automation as a Public-Private Enterprise. In EU–US Symposium on Automated Vehicles, White Paper I; Transportation Research Board: Washington, DC, USA, 2015. [Google Scholar]
- Liu, J.; Khattak, A.J. Delivering improved alerts, warnings, and control assistance using basic safety messages transmitted between connected vehicles. Transp. Res. Part C Emerg. Technol. 2016, 68, 83–100. [Google Scholar] [CrossRef] [Green Version]
- Singh, S. Critical Reasons for Crashes Investigated in the National Motor Vehicle Crash Causation Survey. In Traffic Safety Facts Crash Stats; National Highway Traffic Safety Administration: Washington, DC, USA, 2015; pp. 2–3. [Google Scholar]
- Johnson, C. Readiness of the Road Network for Connected and Autonomous Vehicles; RAC Foundation: London, UK, 2017. [Google Scholar]
- Hayeri, Y.M.; Hendrickson, C.T.; Biehler, A.D. Potential Impacts of Vehicle Automation on Design, Infrastructure and Investment Decisions-A State DOT Perspective. In Transportation Research Board 94th Annual Meeting Compendium of Papers; Transportation Research Board: Washington, DC, USA, 2015. [Google Scholar]
- McDonald, S.S.; Rodier, C. Envisioning automated transit within the built environment: 2020, 2035, 2050. In Road Vehicle Automation 2: Lecture Notes in Mobility; Meyer, G., Beiker, S., Eds.; Springer: Cham, Switzerland, 2015; pp. 225–233. [Google Scholar] [CrossRef]
- AASHTO. A Policy on Geometric Design of Highways and Streets, 4th ed.; American Association of State Highway and Transportation Officials: Washington, DC, USA, 2001; p. 315. [Google Scholar]
- Lutin, J.M.; Kornhauser, A.L.; Lerner-Lam, E. The revolutionary development of self-driving vehicles and implications for the transportation engineering profession. ITE J. 2013, 83, 28–32. [Google Scholar]
- Aria, E.; Olstam, J.; Schwietering, C. Investigation of Automated Vehicles Effects on Driver’s Behavior and Traffic Performance. Transp. Res. Procedia 2016, 15, 761–770. [Google Scholar] [CrossRef] [Green Version]
- Elsahly, O.; Abdelfatah, A. Influence of Autonomous Vehicles on Freeway Traffic Performance for Undersaturated Traffic Conditions. Athens J. Technol. Eng. 2020, 7, 117–132. [Google Scholar] [CrossRef]
- Morando, M.M.; Tian, Q.; Truong, L.T.; Vu, H.L. Studing the safety impact of Autonomous Vehicles Using Simulation-Based Surrogate Safety Measures. J. Adv. Transp. 2018, 2018, 6135183. [Google Scholar] [CrossRef]
- Gueriau, M.; Dusparic, I. Quantifying the Impact of Connected and Autonomous Vehicles on Traffic Efficiency and Safety in Mixed Traffic. In Proceedings of the IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Luttrell, K.; Weaver, M.; Harris, M. The Effect of Autonomous Vehicles on Trauma and Health Care. J. Trauma Acute Care Surg. 2015, 79, 678–682. [Google Scholar] [CrossRef] [PubMed]
- Rau, P.; Yanagisawa, M.; Najm, W.G. Target Crash Population of Automated Vehicles. In Proceedings of the 24th International Technical Conference on the Enhanced Safety of Vehicles (ESV), Gothenburg, Sweden, 8–11 June 2015. [Google Scholar]
- Ulak, M.B.; Ozguven, E.E.; Moses, R.; Sando, T.; Boot, W.; Abdelrazig, Y.; Sobanjo, J. Assesment of Traffic Perfomance Measures and Safety Based on Driver Age and Experience: A Microsimulation Based Analysis for an Unsignalized T-Interection. J. Traffic Transp. Eng. 2019, 6, 455–469. [Google Scholar] [CrossRef]
- Tafidis, P.; Pirdavani, A.; Brijs, T.; Farah, H. Intersection Control Type Effect on Automated Vehicle Operation. In Proceedings of the 19th COTA International Conference of Transportation Professionals, Nanjing, China, 6–8 July 2019. [Google Scholar] [CrossRef]
- Coppola, P.; Silvestri, F. Autonomous vehicles and future mobility solutions. In Autonomous Vehicles and Future Mobility, 1st ed.; Coppola, P., Esztergár-Kiss, D., Eds.; Elsevier: Amsterdam, The Netherlands, 2019; pp. 1–15. [Google Scholar]
- Noort, M.V.; Arem, B.V.; Park, B. Mobysim: An integrated traffic simulation platform. In Proceedings of the 13th International IEEE Annual Conference on Intelligent Transportation Systems, Madeira Island, Portugal, 19–22 September 2010; pp. 19–22. [Google Scholar]
- Li, Z.; Chitturi, M.V.; Zheng, D.; Bill, A.R.; Noyce, D. Modeling Reservation-Based Autonomous Intersection Control in VISSIM. Transp. Res. Rec. J. Transp. Res. Board 2013, 2381, 81–90. [Google Scholar] [CrossRef] [Green Version]
- Wagner, P. Traffic Control and Traffic Management in a Transportation System with Autonomous Vehicles. In Autonomous Driving; Maurer, M., Gerdes, J., Lenz, B., Winner, H., Eds.; Springer: Berlin/Heidelberg, Germany, 2016; pp. 301–316. [Google Scholar] [CrossRef] [Green Version]
- Planung Transport Verkehr AG. PTV Vissim 10; Planung Transport Verkehr AG: Karlsruhe, Germany, 2017; Available online: http://vision-traffic.ptvgroup.com/en-us/products/ptv-vissim/ (accessed on 24 May 2017).
- ATKINS. Research on the Impacts of Connected and Autonomous Vehicles (CAVs) on Traffic Flow. In Stage 2: Traffic Modelling and Analysis Technical Report; Version 2.1; Department for Transport: London, UK, 2016. [Google Scholar]
- Fries, R.; Qi, Y.; Leight, S. How many times should I run the model? Performance Measure: Specific Findings from VISSIM models in Missouri. In Proceedings of the Transportation Research Board 96th Annual Meeting Compendium of Papers, Washington, DC, USA, 8–12 January 2017. [Google Scholar]
- Saeed, T. Road Infrastructure Readiness for Autonomous Vehicles. Ph.D. Thesis, Lyles School of Civil Engineering, West Lafayette, IN, USA, 2019. [Google Scholar]
- Wang, S.; Yu, B. Impacts on the Geometric Design of Highway from Non-Autonomous to Autonomous Vehicles (L1–L4). In Proceedings of the Transportation Research Board 98th Annual Meeting Compendium of Papers, Washington, DC, USA, 13–17 January 2019. [Google Scholar]
- Nitsche, P.; Mocanu, I.; Reinthaler, M. Requirements on tomorrow’s road infrastructure for highly automated driving. In Proceedings of the International Conference on Connected Vehicles and Expo, Vienna, Austria, 3–7 November 2014; IEEE: New York, NY, USA; pp. 939–940. [Google Scholar]
- Gowling WLG. Building the Road Infrastructure for the Future of Connected and Autonomous Vehicles; UK AutoDrive: London, UK, 2018. [Google Scholar]
- Somers, A. Infrastructure Changes to Support Automated Vehicles on Rural and Metropolitan Highways and Freeways. In Projects Findings and Recommendations (Module 5); Austroads Ltd.: Sydney, Australia, 2019. [Google Scholar]
- Lu, X.; Bahman, M.; Farah, H.; Snelder, M. Scenario-Based Infrastructure Requirements for Automated Driving. In Proceedings of the 19th COTA International Conference of Transportation Professionals, Nanjing, China, 6–8 July 2019. [Google Scholar]
- Liu, Y.; Tight, M.; Sun, Q.; Kang, R. A Systematic Review: Road Infrastructure Requirements for Connected and Automated Vehicles (CAVs). J. Phys. Conf. Ser. 2019, 1187, 042073. [Google Scholar] [CrossRef]
- Duarte, F.; Ratti, C. The impact of Autonomous Vehicles on Cities: A review. J. Urban. Technol. 2018, 25, 3–18. [Google Scholar] [CrossRef]
- Bierstedt, J.; Gooze, A.; Gray, C.; Peterman, J.; Raykin, L.; Walters, J. Effects of Next-Generation Vehicles on Travel Demand and Highway Capacity; FP Think Working Group, Fehr & Peers: Walnut Creek, CA, USA, 2014. [Google Scholar]
- Bohm, F.; Hager, K. Introduction of Autonomous Vehicles in the Swedish Traffic System: Effects and Changes Due to the New Self-Driving Car Technology; Uppsala Univeristet: Uppsala, Sweden, 2015. [Google Scholar]
- Sukennik, P. Micro-Simulation Guide for Automated Vehicles; COEXIST (h2020-coexist.eu); PTV Group: Karlsruhe, Germany, 2018. [Google Scholar]
- Planung Transport Verkehr AG. VISSIM 5.30-05 User Manual. 2011; Available online: https://www.yumpu.com/en/document/view/19525178/vissim-530-05-user-manual (accessed on 17 May 2021).
- Transportation Research Board. Highway Capacity Manual; Transportation Research Board: Washington, DC, USA, 2000. [Google Scholar]
- FHWA. Surrogate Safety Assessment Model (SSAM). Federal Highway Administration. Available online: https://www.fhwa.dot.gov/research/tfhrc/projects/projectsite/safety/ssam/index.cfm (accessed on 17 May 2021).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Name | Description | Driving Environment |
|---|---|---|---|
| 0 | no automation | the human drivers are entirely responsible for the control of their vehicle | monitored by human driver |
| 1 | driver assistance | lateral or longitudinal vehicle control is automated | |
| 2 | partial automation | lateral and longitudinal vehicle control is automated | |
| 3 | conditional automation | driving tasks are automated, although human driver intervention is expected upon request | monitored by automated driving system |
| 4 | high automation | driving tasks are automated, and human driver intervention is not expected | |
| 5 | full automation | driving tasks are automated, and no human driver intervention is required |
| Scenario | Fleet Composition | ||
|---|---|---|---|
| No-AVs | Low Levels of AVs | High Levels of AVs | |
| Base | 100% | ||
| “something everywhere” strategy | |||
| Early deployment period | 75% | 25% | |
| Late deployment period | 25% | 75% | |
| “everything somewhere” strategy | |||
| Early deployment period | 75% | 25% | |
| Late deployment period | 25% | 75% | |
| Study | Road Element | Implication |
|---|---|---|
| Hayeri et al. (2015) [9] Johnson (2017) [8] Farah et al. (2018) [4] Saeed (2019) [28] | lane width | reduced lane width |
| Farah et al. (2018) [4] McDonald and Rodier (2015) [10] Saeed (2019) [28] Wang and Yu (2019) [29] | speed limits | increased speed limits |
| McDonald and Rodier (2015) [10] | central reservation | not required |
| Hayeri et al. (2015) [9] | central reservation | reduced central reservation |
| Nitsche et al. [30] Johnson (2017) [8] Gowling WLG (2018) [31] Somers (2019) [32] Saeed (2019) [28] Lu et al. (2019) [33] Liu et al. (2019) [34] | lane markings | required |
| Nitsche et al. [30] Johnson (2017) [8] Gowling WLG (2018) [31] Somers (2019) [32] Saeed (2019) [28] Lu et al. (2019) [33] Liu et al. (2019) [34] | road signs | required |
| Somers (2019) [31] Liu et al. (2019) [33] | curbs | required |
| Duarte and Ratti (2018) [35] | traffic signals | required |
| Hayeri et al. (2015) [9] Saeed (2019) [28] | traffic signals | not required |
| Saeed (2019) [28] Wang and Yu (2019) [29] | stopping sight distance | reduced stopping sight distance |
| Hayeri et al. (2015) [9] Gowling WLG (2018) [30] Saeed (2019) [28] Liu et al. (2019) [33] | shoulders | required |
| Johnson (2017) [8] | corner radii | tighter corner radii |
| Saeed (2019) [28] | corner radii | standard corner radii |
| Type of Vehicles | Description | Impact on Vehicle Operation |
|---|---|---|
| No-AVs | the default behavior is assumed | |
| AVs in “something everywhere” Strategy | automated longitudinal and lateral behavior is assumed | reduced space between vehicles and faster and smoother acceleration/deceleration |
| AVs in “everything somewhere” Strategy | enhanced automated longitudinal and lateral behavior is assumed | more significant reduction in space between vehicles and gap acceptance for lane change and even faster and smoother acceleration/deceleration |
| Parameter | Definition | Type of Vehicles | Source | ||
|---|---|---|---|---|---|
| AVs in “Something Everywhere” Strategy | AVs in “Everything Somewhere” Strategy | AVs in “Something Everywhere” Strategy | AVs in “Everything Somewhere” Strategy | ||
| CC0 | the average desired standstill distance between two vehicles. | 1 m (3.28 ft) | 0.5 m (1.64 ft) | adopted from [36,37,38] | adopted from [26] |
| CC1 | time distribution of speed-dependent part of desired safety distance. | 0.5 s | 0.5 s | adopted from [36,37] | adjusted based on [39] recommendations |
| CC2 | restricts the distance difference (longitudinal oscillation). | 2 m (6.56 ft) | 0 m (0 ft) | adopted from [36] | adjusted based on [39] recommendations |
| CC4 | defines negative speed difference during the following process. | −0.1 | 0 | adopted from [36,37] | adjusted based on [39] recommendations |
| CC5 | defines positive speed difference during the following process. | 0.1 | 0 | adopted from [36,37] | adjusted based on [39] recommendations |
| CC6 | influence of distance on speed oscillation while in the following process. | 0 km/h | 0 km/h | adopted from [36,37] | adjusted based on [39] recommendations |
| CC7 | oscillation during acceleration. | 0.25 m/s2 (0.82 ft/s2) | 0.4 m/s2 (1.3 ft/s2) | adopted from [36] | adopted from [26,37] |
| CC8 | desired acceleration when starting from a standstill. | 3.5 m/s2 (11.48 ft/s2) | 4 m/s2 (13.12 ft/s2) | adopted from [36] | adopted from [37] |
| Min headway (front/rear) | the minimum distance between two vehicles that must be available after a lane change, so that the change can take place. | 0.5 m (1.64 ft) | 0.2 m (0.65 ft) | adjusted based on [39] recommendations | adjusted based on [39] recommendations |
| Observed Vehicles | the number of observed vehicles or certain network objects affect how well vehicles in the link can predict other vehicles’ movements and react accordingly. | 10 | 10 | adopted from [37] | adopted from [37] |
| Smooth closeup behavior | if this option is checked, vehicles slow down more evenly when approaching a stationary obstacle. | ✓ | ✓ | adopted from [37] | adopted from [37] |
| Scenario | Total Delay per Vehicle (s) | Stop Delay per Vehicle (s) | Queue Length (m) | Number of Stops per Vehicle | LOS |
|---|---|---|---|---|---|
| Base | 27.07 | 18.79 | 6.67 | 0.74 | C |
| “something everywhere” strategy | |||||
| Early deployment period | 26.52 | 18.43 | 6.43 | 0.73 | C |
| Late deployment period | 25.86 | 18.07 | 6.17 | 0.70 | C |
| “everything somewhere” strategy | |||||
| Early deployment period | 56.36 | 183.10 | 147.91 | 6.67 | F |
| Late deployment period | 43.69 | 180.23 | 149.62 | 8.61 | F |
| Scenario | Total Delay per Vehicle (s) | Stop Delay per Vehicle (s) | Queue Length (m) | Number of Stops per Vehicle | LOS |
|---|---|---|---|---|---|
| Base | 26.33 | 17.58 | 12.98 | 0.75 | C |
| “something everywhere” strategy | |||||
| Early deployment period | 25.93 | 17.44 | 12.57 | 0.74 | C |
| Late deployment period | 25.35 | 17.27 | 12.06 | 0.72 | C |
| Scenario | Total Delay per Vehicle (s) | Stop Delay per Vehicle (s) | Queue Length (m) | Number of Stops per Vehicle | LOS |
|---|---|---|---|---|---|
| Base | 25.74 | 17.76 | 10.26 | 0.72 | C |
| “something everywhere” strategy | |||||
| Early deployment period | 25.44 | 17.59 | 10.12 | 0.72 | C |
| Late deployment period | 24.93 | 17.33 | 9.88 | 0.70 | C |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tafidis, P.; Farah, H.; Brijs, T.; Pirdavani, A. “Everything Somewhere” or “Something Everywhere”: Examining the Implications of Automated Vehicles’ Deployment Strategies. Sustainability 2021, 13, 9750. https://doi.org/10.3390/su13179750
Tafidis P, Farah H, Brijs T, Pirdavani A. “Everything Somewhere” or “Something Everywhere”: Examining the Implications of Automated Vehicles’ Deployment Strategies. Sustainability. 2021; 13(17):9750. https://doi.org/10.3390/su13179750
Chicago/Turabian StyleTafidis, Pavlos, Haneen Farah, Tom Brijs, and Ali Pirdavani. 2021. "“Everything Somewhere” or “Something Everywhere”: Examining the Implications of Automated Vehicles’ Deployment Strategies" Sustainability 13, no. 17: 9750. https://doi.org/10.3390/su13179750
APA StyleTafidis, P., Farah, H., Brijs, T., & Pirdavani, A. (2021). “Everything Somewhere” or “Something Everywhere”: Examining the Implications of Automated Vehicles’ Deployment Strategies. Sustainability, 13(17), 9750. https://doi.org/10.3390/su13179750