
Half Open Multi-Depot Heterogeneous Vehicle Routing Problem for Hazardous Materials Transportation


Abstract
:1. Introduction
2. Problem Description and Mathematical Models
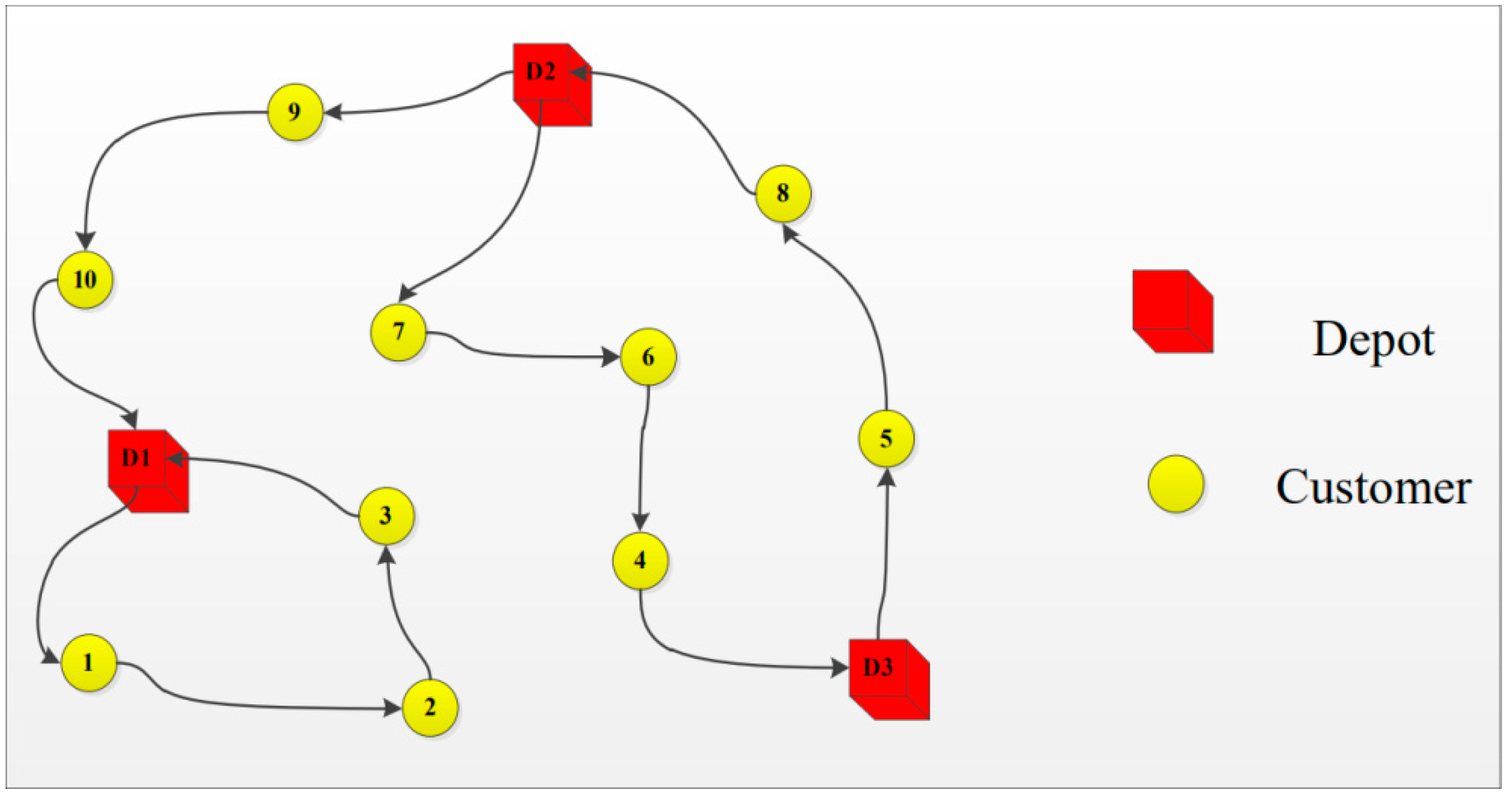
2.1. Problem Description
- Each vehicle starts at a depot and ends at an arbitrary depot after servicing customers.
- Each customer can be serviced by multiple depots and multiple types of vehicles.
- Each customer can be serviced once and only once by a vehicle.
2.2. Model Formulation
2.3. A Bi-Objective Mixed Integer Programming Model
3. Algorithm
3.1. Principles of ε-Constraint Method
- (1)
- Transform a bi-objective mixed integer programming model into a single objective model with limiting another single objective model, then we determine problem which is minimizing transportation cost with transportation risk and other constraints,Problem :where is an upper limit of the value of risk function.Take problem as an instance, the range of is determined by the ideal point and the nadir point [34], the ideal point of our problem can be respectively obtained by solving every single objective model, the problem , i.e., minimize the transportation risk model with constraints and the problem , i.e., minimize transportation cost model with constraints . Furthermore, the nadir point can be respectively obtained by using the optimal solution of cost function as an additional constraint of risk function with constraints namely problem , similarly, using the optimal solution of risk function as an additional constraint of cost function with constraints namely problem .
- (2)
- For problem , the is limited by the range of risk function value of interval . Then, divide the range into equal intervals by equidistant points, and set the initial value of aswhere is changed with different .
- (3)
- Solve problem with an initial to compute an optimal solution, then add the optimal solution to problem to obtain optimal risk and cost vector. Then, repeat to solve problem with different and above steps to obtain the Pareto front.
3.2. Principles of GA
3.2.1. Representation Structure
3.2.2. Initialization Process
3.2.3. Fitness Function
3.2.4. Selection Process
3.2.5. Crossover Process
3.2.6. Mutation Process
3.3. The Hybrid Intelligent Algorithm
- Step 1. Compute problem , , , and by the GA.
- Step 2. Determine the range of the risk function.
- Step 3. Set initial with one of points set .
- Step 4. Solve the problem with , and compute an optimal solution by the GA.
- Step 5. Solve the risk function and the cost function with , obtain the set of values .
- Step 6. Repeat to solve problem with different by the GA. If , go to step 4.
- Step 7. Obtain the Pareto front.
4. Numerical Experiments
4.1. Dataset and Experimental Setup
4.2. Results and Discussions
4.2.1. Case 1: Comparison of Half Open Multi-Depot Heterogeneous VRP with Close Multi-Depot Heterogeneous VRP
- (1)
- Calculate new values of risk and cost with different Pareto optimal vectors, in which , , where and are different for each Pareto optimal vector;
- (2)
- Predefine weight coefficients and , set for convenience;
- (3)
- Calculate the values of and choose a Pareto optimal vector.
- (1)
- Calculate the difference values of all Pareto optimal solutions for the half open route and the close route when , and 15 different Pareto optimal vectors are obtained. As shown in Figure 8, the Pareto fronts of two problems are obtained. It is clear that all Pareto optimal solutions of the half open route are better than the close route. The results show that the average risk can be reduced by 3.99% and the average cost can be reduced by 2.01%, namely, it is better to adopt the half open route.
- (2)
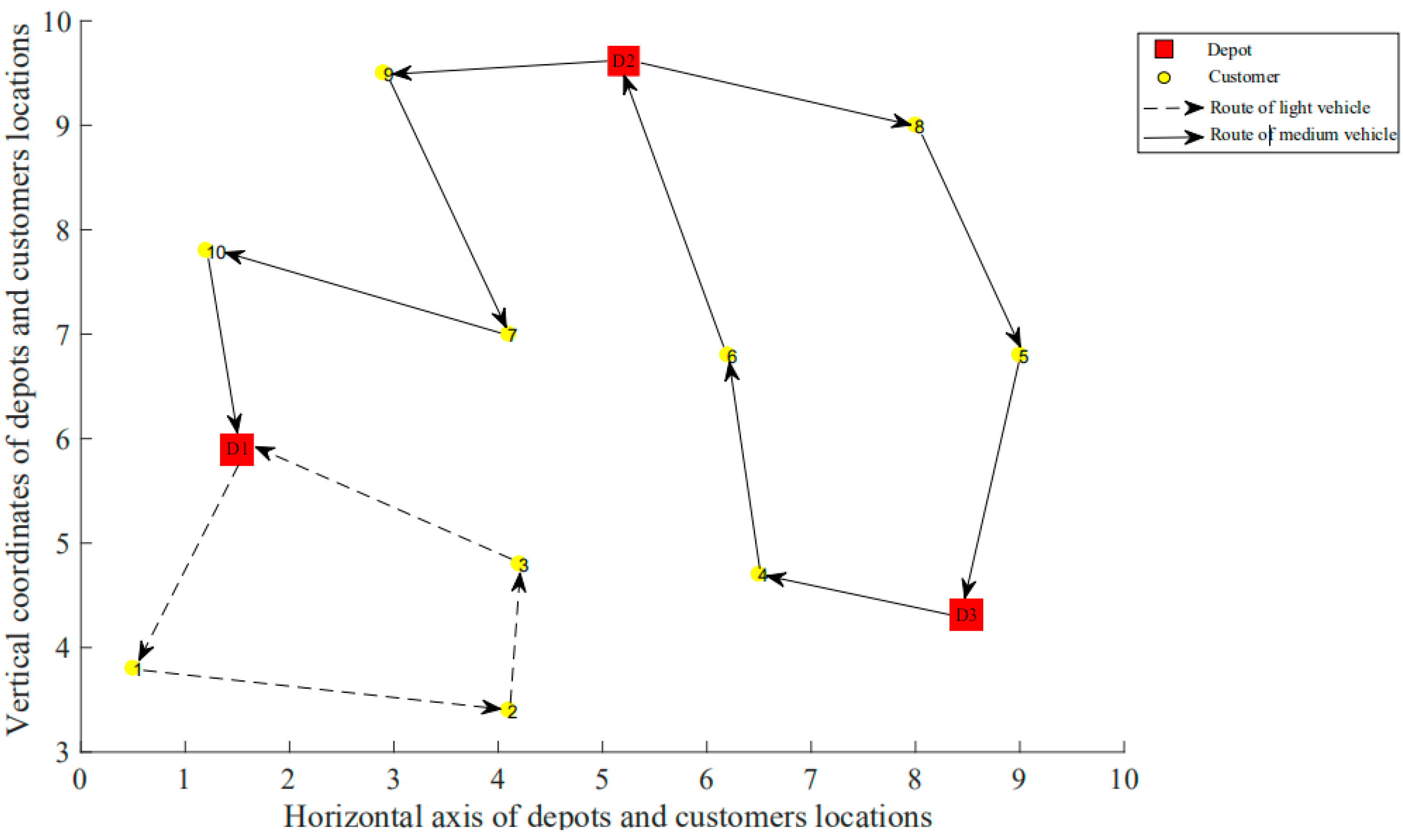
- Choose a Pareto optimal vector using the aforementioned method. As shown in Table 3, in this situation, risk can be reduced by 3.55% and cost can be reduced by 2.36%. For the close route, decision makers may wish a vehicle can carry more hazmat but will cause more risk and cost. For convenience, the half open optimal route is shown in Figure 9.
4.2.2. Case 2: Comparison of Half Open Multi-Depot Heterogeneous VRP with Half Open Multi-Depot Homogeneous VRP
4.2.3. Case 3: Comparison of Parameters
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, B.; Qian, Q.; Tan, Z.; Zhang, P.; Zhou, Y. Multidepot heterogeneous vehicle routing problem for a variety of hazardous materials with risk analysis. Sci. Program 2020, 2020, 1–11. [Google Scholar] [CrossRef]
- Hu, H.; Du, J.; Li, X.; Shang, C.; Shen, Q. Risk models for hazardous material transportation subject to weight variation con-siderations. IEEE Trans. Fuzzy Syst. 2020, 14, 1–12. [Google Scholar]
- Du, J.; Li, X.; Li, L.; Shang, C. Urban hazmat transportation with multi-factor. Soft Comput. 2019, 24, 6307–6328. [Google Scholar] [CrossRef] [Green Version]
- Prins, C. Two memetic algorithms for heterogeneous fleet vehicle routing problems. Eng. Appl. Artif. Intell. 2009, 22, 916–928. [Google Scholar] [CrossRef]
- Xu, X.; Lin, Z.; Zhu, J. DVRP with limited supply and variable neighborhood region in refined oil distribution. Ann. Oper. Res. 2020, 1–25. [Google Scholar] [CrossRef]
- Renaud, J.; Boctor, F.F.; Laporte, G. An improved petal heuristic for the vehicle routing problem. J. Oper. Res. Soc. 1996, 47, 329–336. [Google Scholar] [CrossRef]
- Schrage, L. Formulation and structure of more complex/realistic routing and scheduling problems. Networks 1981, 11, 229–232. [Google Scholar] [CrossRef]
- Du, J.; Li, X.; Yu, L.; Dan, R.; Zhou, J. Multi-depot vehicle routing problem for hazardous materials transportation: A fuzzy bilevel programming. Inf. Sci. 2017, 399, 201–218. [Google Scholar] [CrossRef]
- Ma, C.; Mao, B.; Xu, Q.; Hua, G.; Zhang, S.; Zhang, T. Multi-depot vehicle routing optimization considering energy consumption for hazardous materials transportation. Sustainability 2018, 10, 3519. [Google Scholar] [CrossRef] [Green Version]
- Bula, G.A.; Prodhon, C.; González, F.A.; Afsar, H.M.; Velasco, N. Variable neighborhood search to solve the vehicle routing problem for hazardous materials transportation. J. Hazard. Mater. 2017, 324, 472–480. [Google Scholar] [CrossRef]
- Bula, G.A.; Afsar, H.M.; González, F.A.; Prodhon, C.; Velasco, N. Bi-objective vehicle routing problem for hazardous materials transportation. J. Clean. Prod. 2019, 206, 976–986. [Google Scholar] [CrossRef]
- Li, J.; Li, Y.; Pardalos, P.M. Multi-depot vehicle routing problem with time windows under shared depot resources. J. Comb. Optim. 2016, 31, 515–532. [Google Scholar] [CrossRef]
- Erkut, E.; Ingolfsson, A. Transport risk models for hazardous materials: Revisited. Oper. Res. Lett. 2005, 33, 81–89. [Google Scholar] [CrossRef]
- Alp, E. Risk-based transportation planning practice: Overall methodology and a case example. Inf. Syst. Oper. Res. 1995, 33, 4–19. [Google Scholar] [CrossRef]
- ReVelle, C.; Cohon, J.; Shobrys, D. Simultaneous siting and routing in the disposal of hazardous wastes. Transp. Sci. 1991, 25, 138–145. [Google Scholar] [CrossRef]
- Saccomanno, F.F.; Chan, A.W. Economic evaluation of routing strategies for hazardous road shipments. Transp. Res. Rec. 1985, 1020, 12–18. [Google Scholar]
- Abkowitz, M.; Lepofsky, M.; Cheng, P. Selecting criteria for designating hazardous materials highway routes. Transp. Res. Rec. 1992, 1333, 30–35. [Google Scholar]
- Sivakumar, R.A.; Batta, R.; Karwan, M.H. A network-based model for transporting extremely hazardous materials. Oper. Res. Lett. 1993, 13, 85–93. [Google Scholar] [CrossRef]
- Erkut, E.; Ingolfsson, A. Catastrophe avoidance models for hazardous materials route planning. Transp. Sci. 2000, 34, 165–179. [Google Scholar] [CrossRef]
- Zhou, Z.; Chu, F.; Che, A.; Zhou, M. Epsilon-constraint and fuzzy logic-based optimization of hazardous material transportation via lane reservation. IEEE Trans. Intell. Transp. Syst. 2013, 14, 847–857. [Google Scholar] [CrossRef]
- Garrido, R.A.; Bronfman, A.C. Equity and social acceptability in multiple hazardous materials routing through urban areas. Transp. Res. Part A Policy Pract. 2017, 102, 244–260. [Google Scholar] [CrossRef]
- Ho, W.; Ho, G.T.; Ji, P.; Lau, H.C.W. A hybrid genetic algorithm for the multi-depot vehicle routing problem. Eng. Appl. Artif. Intell. 2008, 21, 548–557. [Google Scholar] [CrossRef]
- Hu, H.; Li, J.; Li, X.; Shang, C. Modeling and solving a multi-period inventory fulfilling and routing problem for hazardous materials. J. Syst. Sci. Complex. 2020, 33, 760–782. [Google Scholar] [CrossRef]
- Kancharla, S.R.; Ramadurai, G. Multi-depot two-echelon fuel minimizing routing problem with heterogeneous fleets: Model and heuristic. Netw. Spat. Econ. 2019, 19, 969–1005. [Google Scholar] [CrossRef]
- Mancini, S. A real-life multi depot multi period vehicle routing problem with a heterogeneous fleet: Formulation and adaptive large neighborhood search based matheuristic. Transp. Res. Part C Emerg. Technol. 2016, 70, 100–112. [Google Scholar] [CrossRef]
- Xu, X.; Hao, J.; Zheng, Y. Multi-objective artificial bee colony algorithm for multi-stage resource leveling problem in sharing logistics network. Comput. Ind. Eng. 2020, 142, 106338. [Google Scholar] [CrossRef]
- Xu, X.; Hao, J.; Yu, L.; Deng, Y. Fuzzy optimal allocation model for task–resource assignment problem in a collaborative logistics network. IEEE Trans. Fuzzy Syst. 2018, 27, 1112–1125. [Google Scholar] [CrossRef]
- Shen, L.; Tao, F.; Wang, S. Multi-depot open vehicle routing problem with time windows based on carbon trading. Int. J. Environ. Res. Public Health 2018, 15, 2025. [Google Scholar] [CrossRef] [Green Version]
- T’Kindt, V.; Billaut, J.-C. Multicriteria scheduling problems: A survey. RAIRO Oper. Res. 2001, 35, 143–163. [Google Scholar] [CrossRef] [Green Version]
- Matl, P.; Hartl, R.F.; Vidal, T. Leveraging single-objective heuristics to solve bi-objective problems: Heuristic box splitting and its application to vehicle routing. Networks 2019, 73, 382–400. [Google Scholar] [CrossRef] [Green Version]
- Holland, J.H. An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence: Adaptation in Natural and Artificial Systems; MIT Press: Cambridge, MA, USA, 1992. [Google Scholar]
- Batta, R.; Chiu, S.S. Optimal obnoxious paths on a network: Transportation of hazardous materials. Oper. Res. 1988, 36, 84–92. [Google Scholar] [CrossRef]
- Ronza, A.; Vílchez, J.; Casal, J. Using transportation accident databases to investigate ignition and explosion probabilities of flammable spills. J. Hazard. Mater. 2007, 146, 106–123. [Google Scholar] [CrossRef] [PubMed]
- Kirlik, G.; Sayin, S. Computing the nadir point for multiobjective discrete optimization problem. J. Glob. Optim. 2015, 62, 79–99. [Google Scholar] [CrossRef]
- Xu, X.; Wei, Z.; Ji, Q.; Wang, C. Global renewable energy development: Influencing factors, trend predictions and countermeasures. Resour. Policy 2019, 63, 101470. [Google Scholar] [CrossRef]
- Hu, H.; Li, X.; Zhang, Y.; Shang, C. Multi-objective location-routing model for hazardous material logistics with traffic restriction constraint in inter-city roads. Comput. Ind. Eng. 2018, 128, 861–876. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notations | |
|---|---|
| Sets and indices | |
| set of depots nodes | |
| set of customers nodes | |
| set of all nodes, | |
| set of all arcs, | |
| set of vehicle types | |
| set of all heterogenous vehicles | |
| vehicle type index, | |
| vehicle index, | |
| Parameters | |
| accident probability of a vehicle of type on arc | |
| exposure radius when vehicle of type has an accident on arc | |
| distance between node and node | |
| population density associated with the accident area on arc | |
| number of affected people when vehicle of type has an accident on arc | |
| unit distance transportation cost of a vehicle of type on arc | |
| fixed cost of a vehicle of type | |
| demand of customer | |
| maximum capacity of vehicle of type | |
| transportation risk of vehicle of type on arc | |
| transportation cost of vehicle of type on arc | |
| Decision variables | |
| 1, if vehicle of type is used; 0 otherwise | |
| 1, if vehicle of type travels from node to node ; 0 otherwise | |
| Auxiliary variables | |
| loading of vehicle of type travels from node to node |
| Light vehicle | 80 | 8 | 7 | 6 | 0.25 | 1.05 |
| Medium vehicle | 100 | 12 | 6 | 11 | 0.25 | 1.05 |
| Heavy vehicle | 120 | 16 | 5 | 15 | 0.25 | 1.05 |
| Case 1 | Pareto Optimal Vector | Number of Vehicles Used | ||||
|---|---|---|---|---|---|---|
| R | C | Route | Light | Medium | Heavy | |
| Half open route | 83.06 | 1013.81 | D3→4→6→D2 | 1 | 3 | - |
| D2→8→5→D3 | ||||||
| D2→9→7→10→D1 | ||||||
| D1→1→2→3→D1 | ||||||
| Close route | 86.11 | 1038.31 | D2→9→10→3→D2 | - | 2 | 1 |
| D3→8→6→4→2→D3 | ||||||
| D1→1→2→7→D1 | ||||||
| Saving(%) | 3.55 | 2.36 | ||||
| Case 2 | Pareto Optimal Vector | Number of Vehicles Used | ||||
|---|---|---|---|---|---|---|
| R | C | Route | Light | Medium | Heavy | |
| Light vehicle | 82.14 | 1055.93 | D1→10→D1 | 7 | - | - |
| D3→5→D3 | ||||||
| D2→8→9→D2 | ||||||
| D2→7→D1 | ||||||
| D1→2→4→D3 | ||||||
| D1→1→3→D1 | ||||||
| D2→6→D3 | ||||||
| Medium vehicle | 82.19 | 1062.27 | D1→3→6→9→D2 | 4 | - | - |
| D2→8→5→D3 | ||||||
| D3→4→7→10→D1 | ||||||
| D1→1→2→D1 | ||||||
| Heavy vehicle | 85.17 | 1070.39 | D3→5→6→8→D2 | 3 | - | - |
| D1→2→3→4→7→D2 | ||||||
| D2→9→10→1→D1 | ||||||
| Case 3 | f | Pareto Optimal Vector | ||||||
|---|---|---|---|---|---|---|---|---|
| Light | Medium | Heavy | Light | Medium | Heavy | R | C | |
| 1 | 80 | 100 | 120 | 7 | 6 | 5 | 83.06 | 1013.81 |
| 2 | 80 | 100 | 120 | 5 | 6 | 7 | 81.48 | 1028.28 |
| 3 | 80 | 100 | 120 | 7 | 4 | 1 | 80.94 | 1071.73 |
| 4 | 80 | 100 | 120 | 1 | 4 | 7 | 79.83 | 1063.64 |
| 5 | 120 | 100 | 80 | 7 | 6 | 5 | 82.14 | 998.29 |
| 6 | 80 | 150 | 200 | 7 | 6 | 5 | 82.27 | 1036.29 |
| 7 | 200 | 150 | 80 | 7 | 6 | 5 | 82.21 | 1039.42 |
| 8 | 80 | 120 | 100 | 7 | 5 | 6 | 82.47 | 1031.82 |
| 9 | 100 | 80 | 120 | 5 | 7 | 6 | 82.84 | 1023.91 |
| 10 | 120 | 80 | 100 | 6 | 5 | 7 | 82.12 | 1035.27 |
| 11 | 80 | 200 | 150 | 7 | 1 | 4 | 81.93 | 1087.03 |
| 12 | 150 | 80 | 200 | 1 | 7 | 4 | 81.85 | 1061.39 |
| 13 | 200 | 80 | 150 | 4 | 7 | 1 | 80.53 | 1123.27 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Z.; Ha, M.; Hu, H.; Ma, H. Half Open Multi-Depot Heterogeneous Vehicle Routing Problem for Hazardous Materials Transportation. Sustainability 2021, 13, 1262. https://doi.org/10.3390/su13031262
Zhou Z, Ha M, Hu H, Ma H. Half Open Multi-Depot Heterogeneous Vehicle Routing Problem for Hazardous Materials Transportation. Sustainability. 2021; 13(3):1262. https://doi.org/10.3390/su13031262
Chicago/Turabian StyleZhou, Zhongxin, Minghu Ha, Hao Hu, and Hongguang Ma. 2021. "Half Open Multi-Depot Heterogeneous Vehicle Routing Problem for Hazardous Materials Transportation" Sustainability 13, no. 3: 1262. https://doi.org/10.3390/su13031262
APA StyleZhou, Z., Ha, M., Hu, H., & Ma, H. (2021). Half Open Multi-Depot Heterogeneous Vehicle Routing Problem for Hazardous Materials Transportation. Sustainability, 13(3), 1262. https://doi.org/10.3390/su13031262