
Hardware-in-the-Loop to Test an MPPT Technique of Solar Photovoltaic System: A Support Vector Machine Approach

 ,
, 
 ,
,  ,
, 
Abstract
:1. Introduction
- Fast tracking response (transient response).
- No oscillations around the MPP (steady-state response).
- Response performance against solar irradiance and temperature changes.
- Simple structure with a low computational cost.
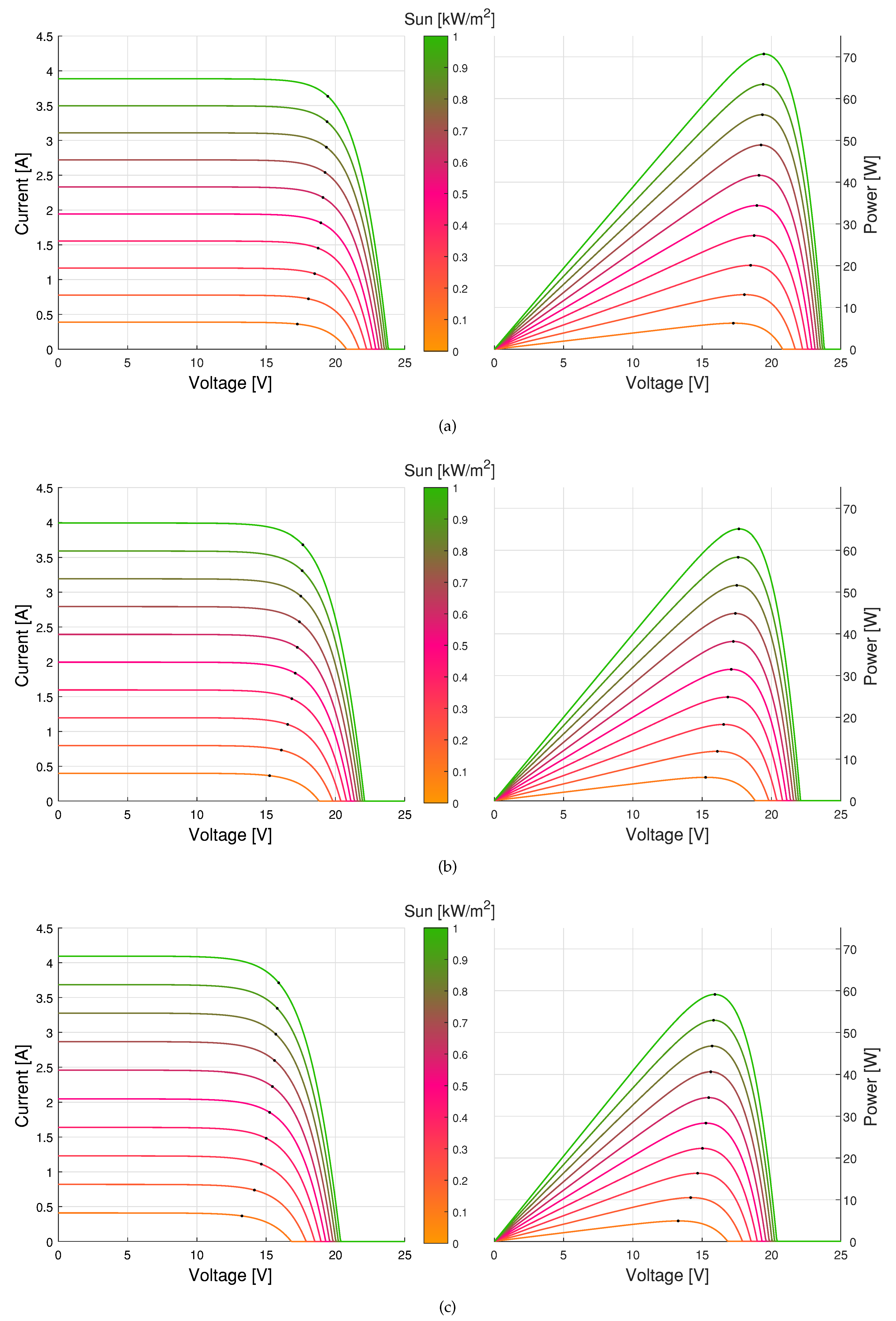
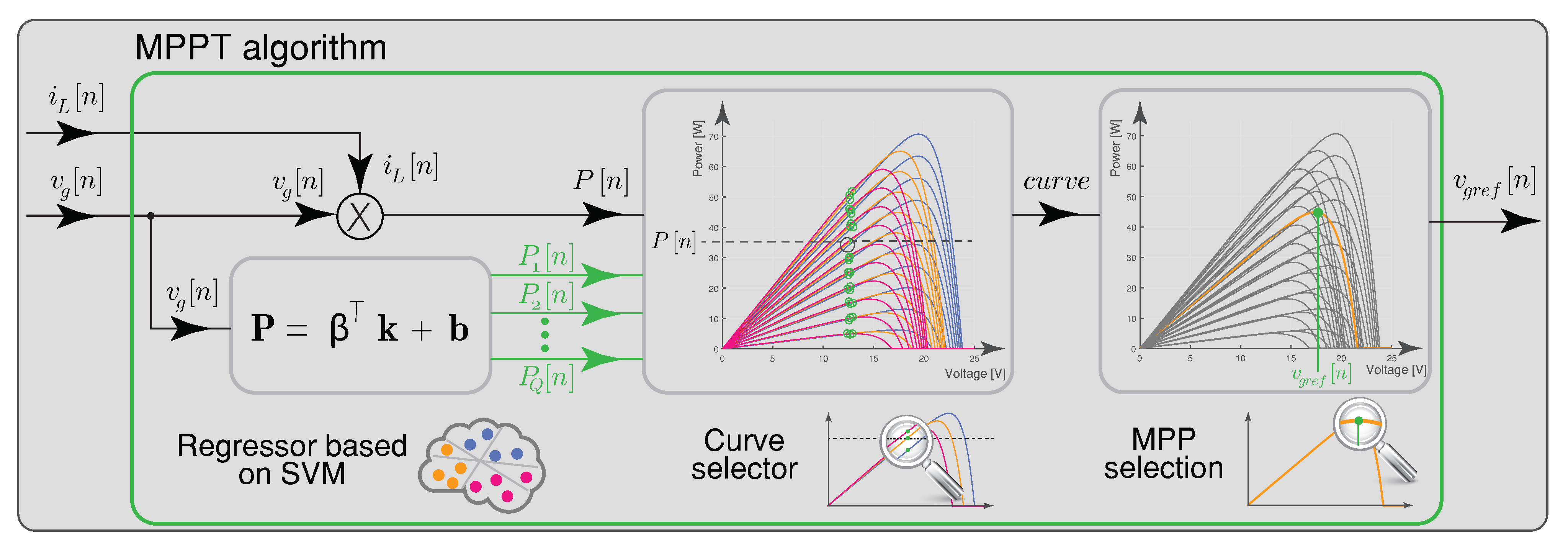
- Provide a new method to determine the MPP of the PV module based on multiple-input multiple-output SVM, without oscillations around the MPP in steady state. The training phase of the SVM only requieres the 10% of the data of the P-V characteristic curves (at different levels of irradiation and temperature) that are given by the manufacturer of the PV module.
- The proposed MPPT algorithm and the double loop control of the DC-DC boost converter can be implemented in a commercial low-cost DSC.
- The performance of the proposed method has been verified through simulations and hardware-in-the loop experiments, showing good accuraccy and reproducibility.
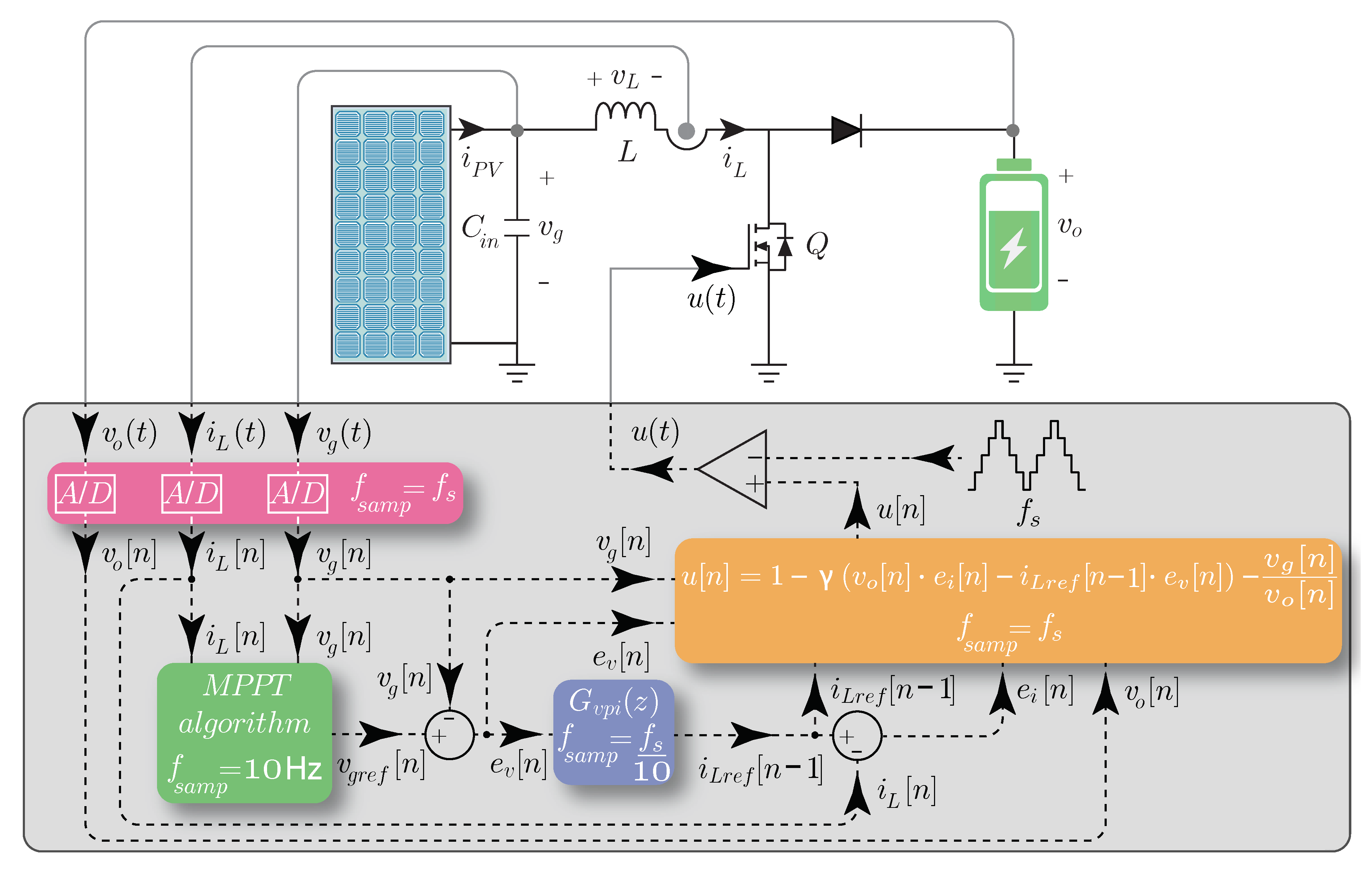
2. MPPT Control by DC-DC Boost Converter
2.1. Average Current Control Based on Passivity
2.2. Discrete-Time PI Voltage Control
3. MPPT Algorithm
3.1. P&O Method
3.2. Proposed Support Vector Machine MPPT Method
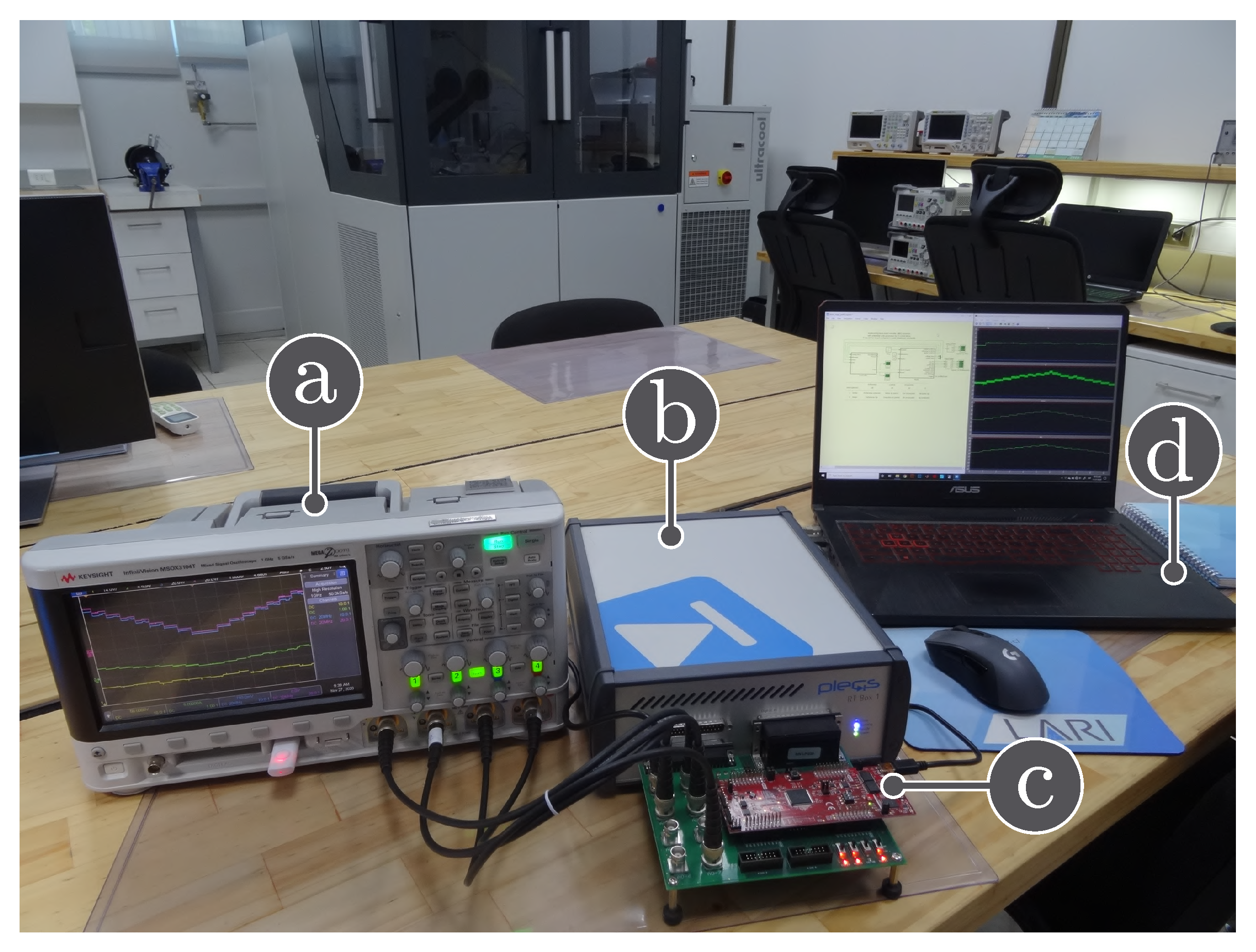
4. Results
- A TI 28069M LaunchPad.
- An RT Box LaunchPad Interface
- A laptop with the PLECS software.
- An oscilloscope Keysight MSOX2014A.
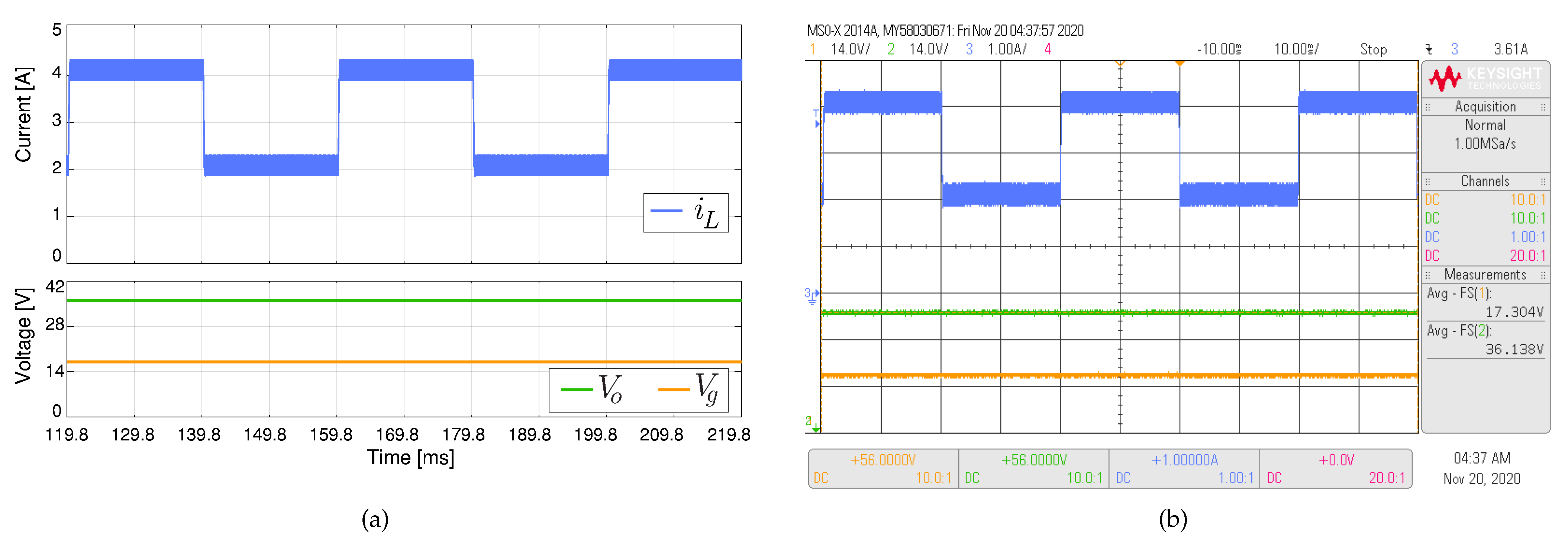
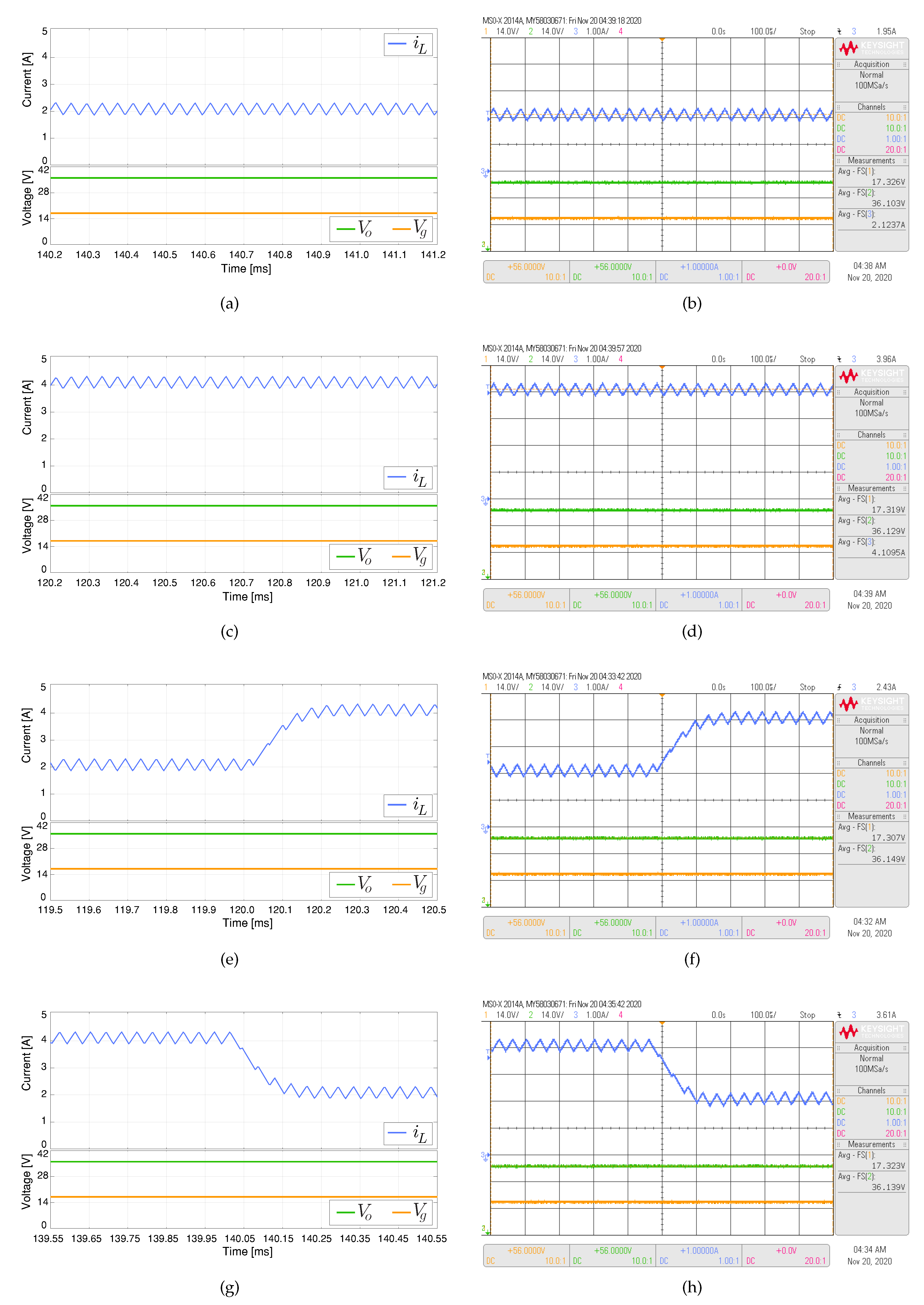
- Inner loop current control test. The current control is validated through a step change of the inductor reference current from 2 A to 6 A and back to 2 A for the current control strategy that is based on passivity.
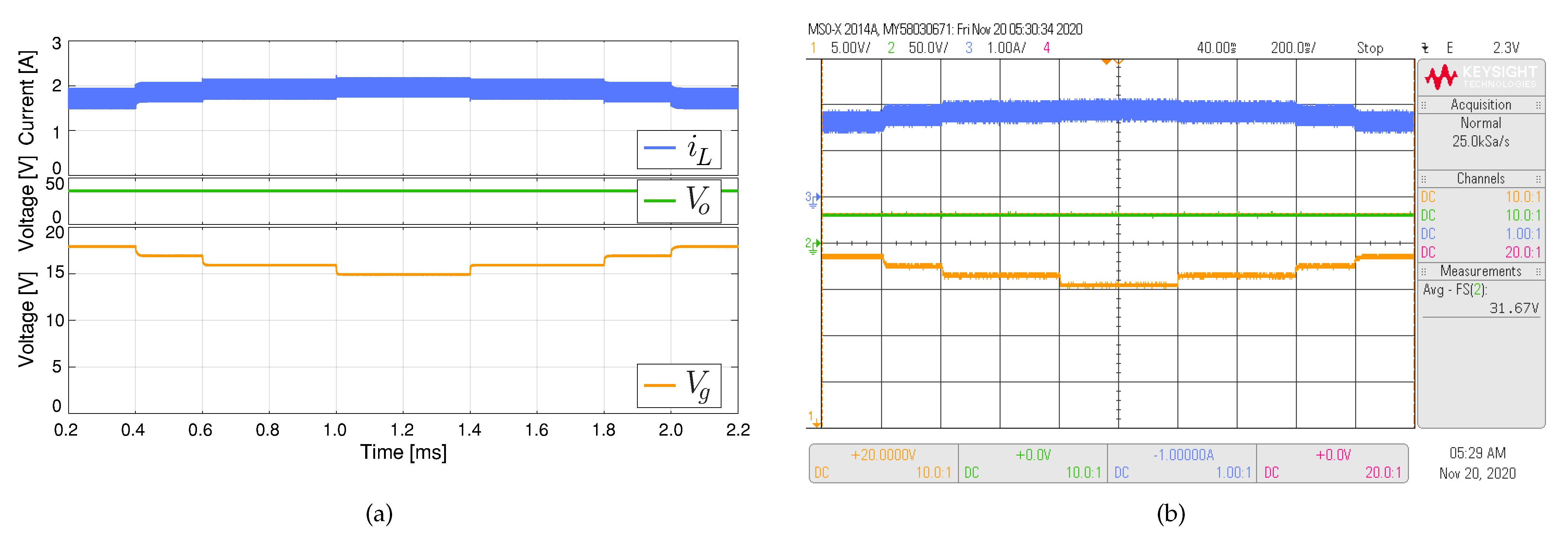
- Double loop control test. Once the inner loop is validated, we proceed to implement a double loop control using an external voltage control to regulate the input voltage (the PV module voltage); this control is a proportional-integrated control; for these tests, voltage reference changes are realized from 15 V to 18 V, in order to demonstrate that the input signal of the converter tracking the reference and the inductor current follow the changes.
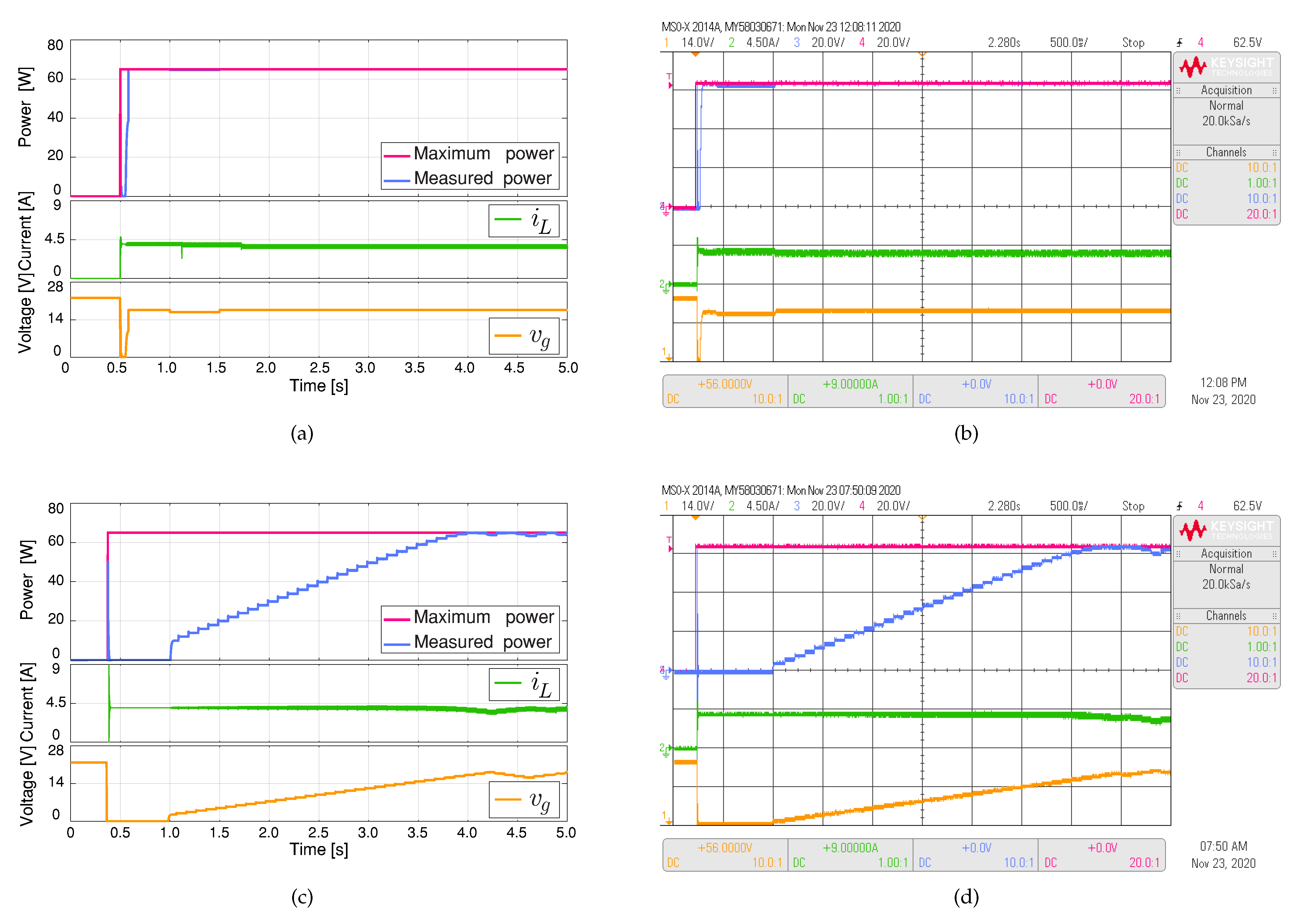
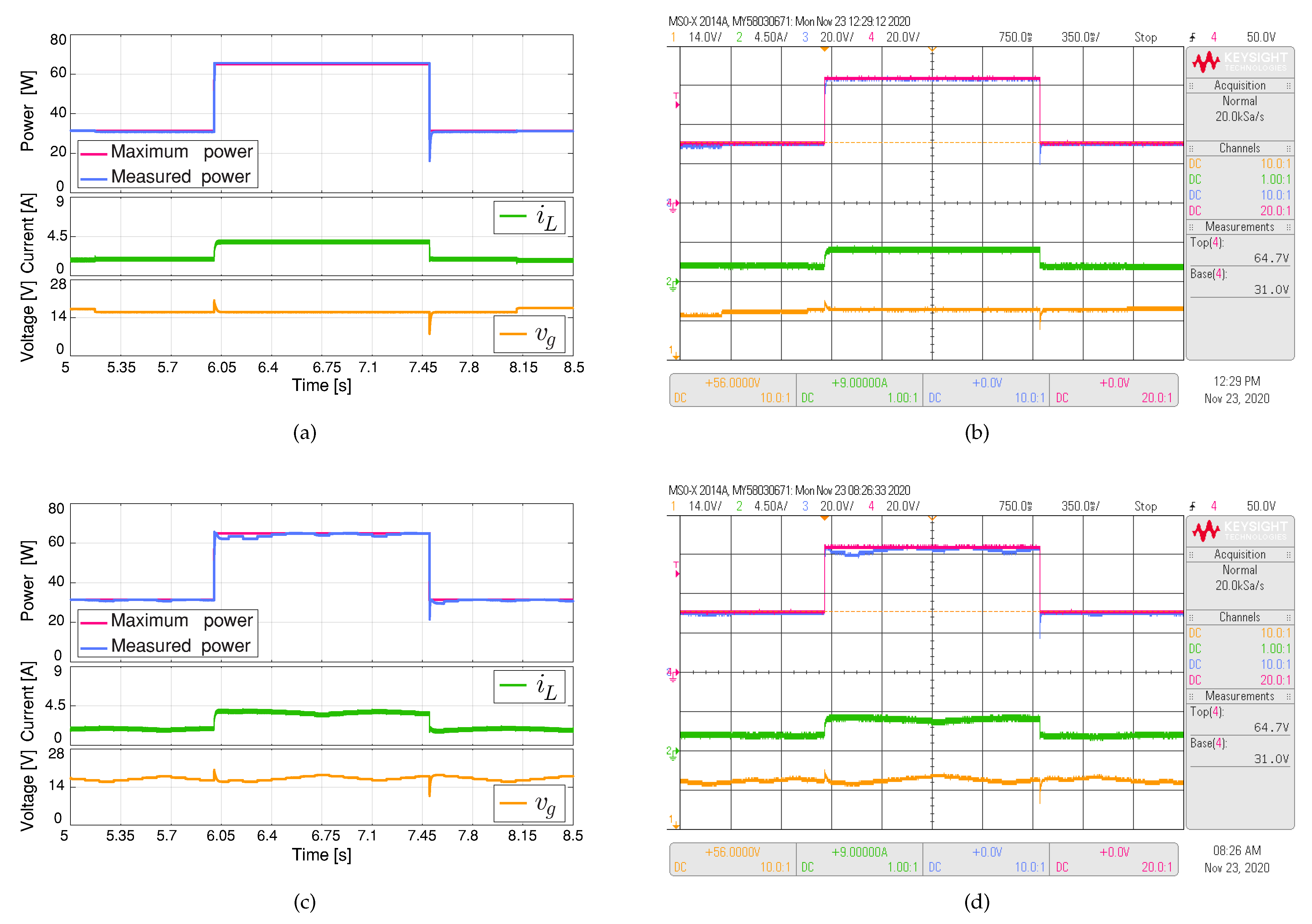
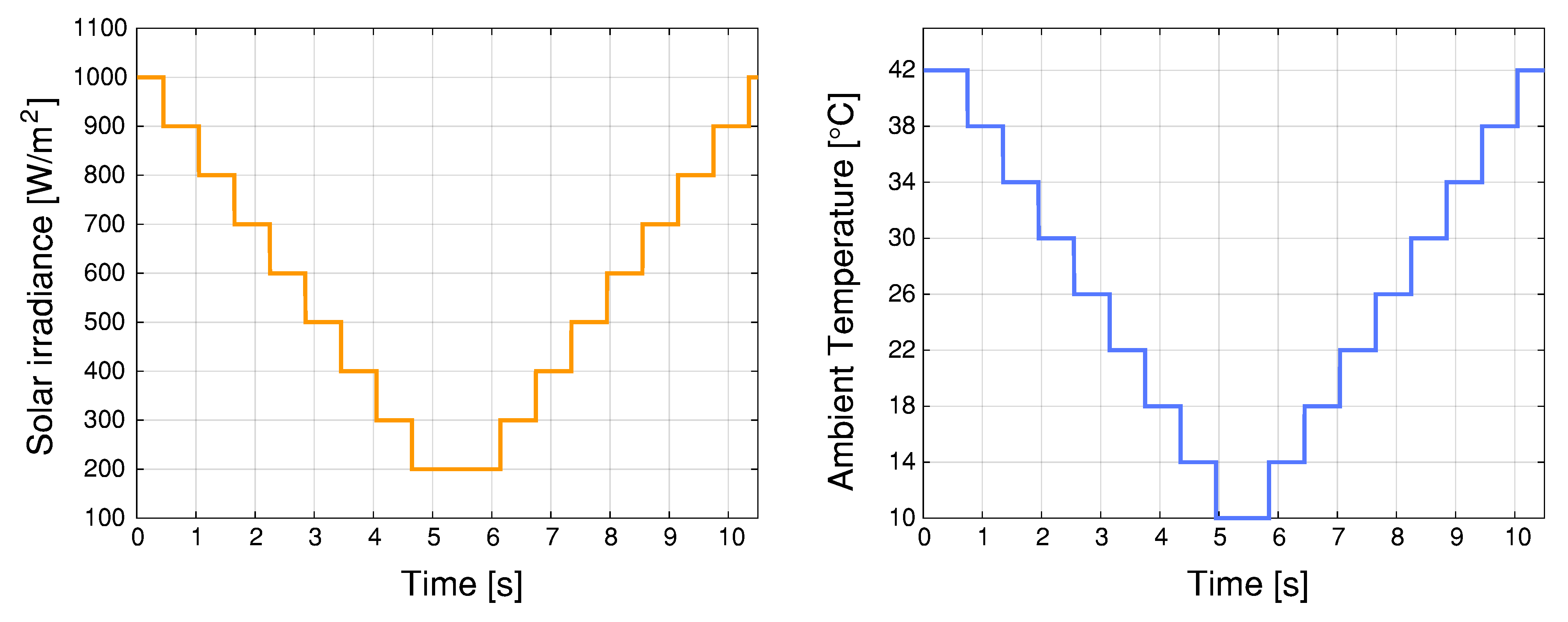
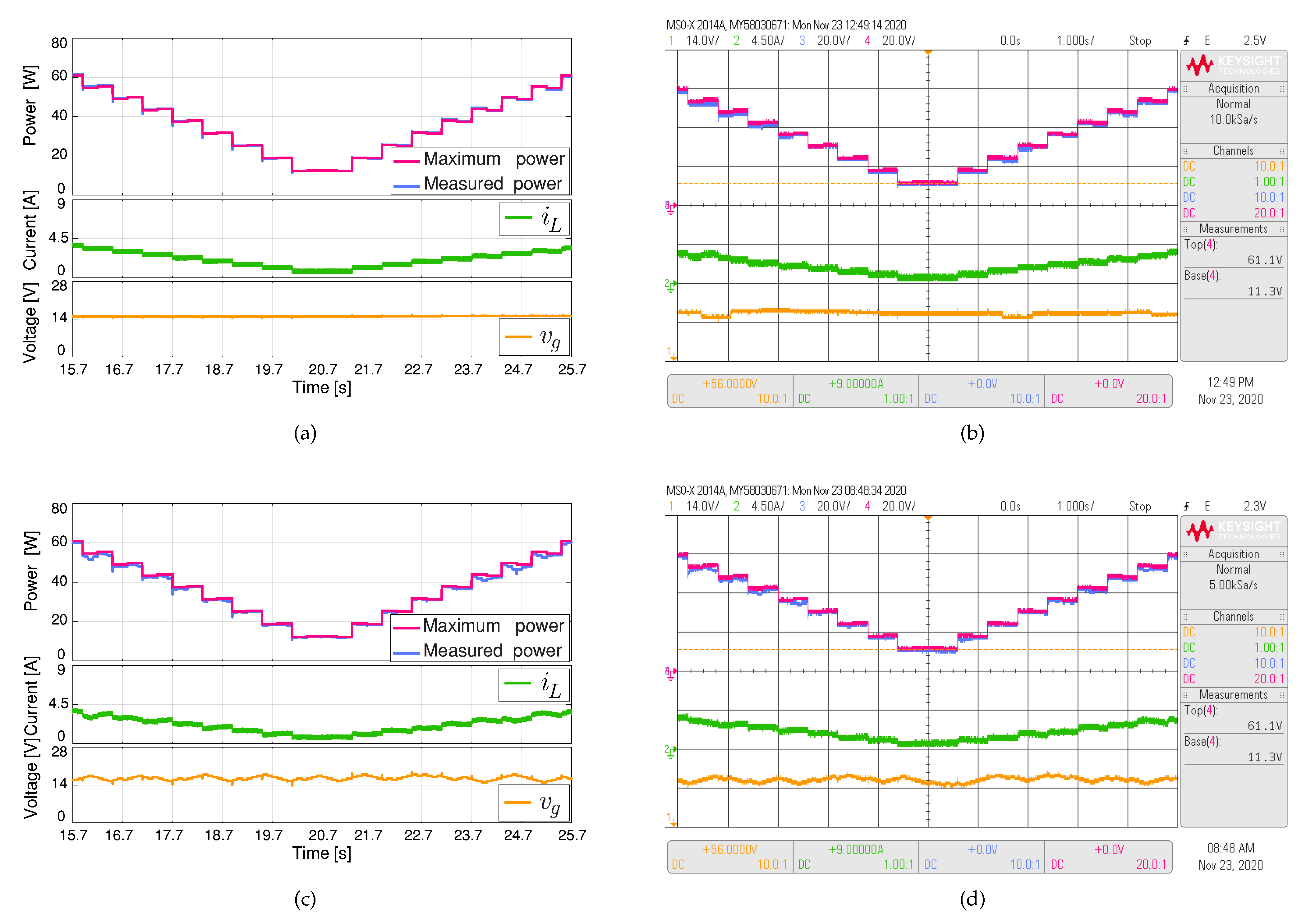
- A comparison with P&O method is realized, where three comparison tests are performed: of the system start-up, of change in irradiance between 1000 W/m and 500 W/m, and vice versa, as well as the dynamic behavior of the MPPT algorithms, according to a profile of irrandiance and ambient temperature.
4.1. Inner Loop Current Control Based on Passivity Results
4.2. Double Loop Results
4.3. Comparison of MPPT Methods Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Khan, R.; Khan, L.; Ullah, S.; Sami, I.; Ro, J.S. Backstepping Based Super-Twisting Sliding Mode MPPT Control with Differential Flatness Oriented Observer Design for Photovoltaic System. Electronics 2020, 9, 1543. [Google Scholar] [CrossRef]
- Seyedmahmoudian, M.; Kok Soon, T.; Jamei, E.; Thirunavukkarasu, G.S.; Horan, B.; Mekhilef, S.; Stojcevski, A. Maximum power point tracking for photovoltaic systems under partial shading conditions using bat algorithm. Sustainability 2018, 10, 1347. [Google Scholar] [CrossRef] [Green Version]
- Al-Majidi, S.D.; Abbod, M.F.; Al-Raweshidy, H.S. Design of an Efficient Maximum Power Point Tracker Based on ANFIS Using an Experimental Photovoltaic System Data. Electronics 2019, 8, 858. [Google Scholar] [CrossRef] [Green Version]
- González-Castaño, C.; Lorente-Leyva, L.L.; Muñoz, J.; Restrepo, C.; Peluffo-Ordóñez, D.H. An MPPT Strategy Based on a Surface-Based Polynomial Fitting for Solar Photovoltaic Systems Using Real-Time Hardware. Electronics 2021, 10, 206. [Google Scholar] [CrossRef]
- Mohammad, A.N.M.; Radzi, M.A.M.; Azis, N.; Shafie, S.; Zainuri, M.A.A.M. An Enhanced Adaptive Perturb and Observe Technique for Efficient Maximum Power Point Tracking Under Partial Shading Conditions. Appl. Sci. 2020, 10, 3912. [Google Scholar] [CrossRef]
- Hammami, M.; Ricco, M.; Ruderman, A.; Grandi, G. Three-phase three-level flying capacitor PV generation system with an embedded ripple correlation control MPPT algorithm. Electronics 2019, 8, 118. [Google Scholar] [CrossRef] [Green Version]
- Moussa, I.; Khedher, A.; Bouallegue, A. Design of a low-cost PV emulator applied for PVECS. Electronics 2019, 8, 232. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Yang, Y.; Fang, G.; Zhang, B.; Wen, H.; Tang, H.; Fu, L.; Chen, X. An advanced maximum power point tracking method for photovoltaic systems by using variable universe fuzzy logic control considering temperature variability. Electronics 2018, 7, 355. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.C.; Huh, J.H.; Ko, J.S. Improvement of MPPT control performance using fuzzy control and VGPI in the PV system for micro grid. Sustainability 2019, 11, 5891. [Google Scholar] [CrossRef] [Green Version]
- Farayola, A.; Hasan, A.; Ali, A. Efficient photovoltaic mppt system using coarse gaussian support vector machine and artificial neural network techniques. Int. J. Innov. Comput. Inf. Control. 2018, 14, 323–339. [Google Scholar] [CrossRef]
- Ma, J.; Jiang, H.; Huang, K.; Bi, Z.; Man, K.L. Novel Field-Support Vector Regression-Based Soft Sensor for Accurate Estimation of Solar Irradiance. IEEE Trans. Circuits Syst. Regul. Pap. 2017, 64, 3183–3191. [Google Scholar] [CrossRef]
- Yan, K.; Du, Y.; Ren, Z. MPPT Perturbation Optimization of Photovoltaic Power Systems Based on Solar Irradiance Data Classification. IEEE Trans. Sustain. Energy 2019, 10, 514–521. [Google Scholar] [CrossRef]
- Sánchez-Fernández, M.; de Prado-Cumplido, M.; Arenas-García, J.; Pérez-Cruz, F. SVM multiregression for nonlinear channel estimation in multiple-input multiple-output systems. IEEE Trans. Signal Process. 2004, 52, 2298–2307. [Google Scholar] [CrossRef]
- Schönberger, J. Modeling a Photovoltaic String using PLECS. In Application Example, Ver; Internal Report Plexim: Zürich, Switzerland, 2013; pp. 4–13. [Google Scholar]
- Sira-Ramirez, H.J.; Silva-Ortigoza, R. Control Design Techniques in Power Electronics Devices; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- García-Rodríguez, V.H.; García-Sánchez, J.R.; Silva-Ortigoza, R.; Hernández-Márquez, E.; Taud, H.; Ponce-Silva, M.; Saldaña-Gonzalez, G. Passivity Based Control for the “Boost Converter-Inverter-DC Motor” System. In Proceedings of the 2017 International Conference on Mechatronics, Electronics and Automotive Engineering (ICMEAE), Morelos, México, 21–24 November 2017; pp. 77–81. [Google Scholar]
- Farhat, M.; Barambones, O.; Sbita, L. A new maximum power point method based on a sliding mode approach for solar energy harvesting. Appl. Energy 2017, 185, 1185–1198. [Google Scholar] [CrossRef]
- Pagola, V.; Peña, R.; Segundo, J.; Ospino, A. Rapid Prototyping of a Hybrid PV–Wind Generation System Implemented in a Real-Time Digital Simulation Platform and Arduino. Electronics 2019, 8, 102. [Google Scholar] [CrossRef] [Green Version]
- Kamran, M.; Mudassar, M.; Fazal, M.R.; Asghar, M.U.; Bilal, M.; Asghar, R. Implementation of improved Perturb & Observe MPPT technique with confined search space for standalone photovoltaic system. J. King Saud Univ. Eng. Sci. 2018. [Google Scholar] [CrossRef]
- Kollimalla, S.K.; Mishra, M.K. A novel adaptive P&O MPPT algorithm considering sudden changes in the irradiance. IEEE Trans. Energy Convers. 2014, 29, 602–610. [Google Scholar]
- Ahmed, J.; Salam, Z. A modified P&O maximum power point tracking method with reduced steady-state oscillation and improved tracking efficiency. IEEE Trans. Sustain. Energy 2016, 7, 1506–1515. [Google Scholar]
- Andrean, V.; Chang, P.C.; Lian, K.L. A review and new problems discovery of four simple decentralized maximum power point tracking algorithms—Perturb and observe, incremental conductance, golden section search, and Newton’s quadratic interpolation. Energies 2018, 11, 2966. [Google Scholar] [CrossRef] [Green Version]
- Schölkopf, B.; Smola, A. Learning with Kernels; MIT Press: Cambridge, MA, USA, 2001. [Google Scholar]
- Zafar, M.H.; Al-shahrani, T.; Khan, N.M.; Feroz Mirza, A.; Mansoor, M.; Qadir, M.U.; Khan, M.I.; Naqvi, R.A. Group Teaching Optimization Algorithm Based MPPT Control of PV Systems under Partial Shading and Complex Partial Shading. Electronics 2020, 9, 1962. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Electrical Parameters | Value |
|---|---|
| Maximum power | 65 W |
| Voltage at maximum power | 17.6 V |
| Current at maximum power | 3.69 A |
| Short-circuit current | 3.99 A |
| Open-circuit voltage | 22.1 V |
| Temperature coefficient of short-circuit current | %/°C |
| Temperature coefficient | mV/°C |
| Criteria | P&O | MPPT-Proposed Algorithm |
|---|---|---|
| Settling time [s] | 2.98 | 0.08 |
| Power ripple [W] | 1.81 | 0.26 |
| Mean power tracked [W] | 44.93 | 58.46 |
| Power at global maximum [W] | 64.98 | 64.98 |
| Tracking factor [%] | 70.08 | 95.53 |
| Criteria | P&O | MPPT-Proposed Algorithm |
|---|---|---|
| RE | 5.598 | 2.710 |
| MAE | 0.521 | 0.476 |
| RMSE | 0.919 | 0.714 |
| MPPT Algorithm | P&O | MPPT-Proposed Algorithm |
|---|---|---|
| Parameters knowledge | Not necessary | Not necessary |
| Complexity | Low | Moderate |
| Oscillation around MPP | Yes | No |
| Parameter tuning | No | No |
| Convergence speed | Slow | Fast |
| Overall efficiency | Medium | High |
| Precision | Low | High |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
González-Castaño, C.; Marulanda, J.; Restrepo, C.; Kouro, S.; Alzate, A.; Rodriguez, J. Hardware-in-the-Loop to Test an MPPT Technique of Solar Photovoltaic System: A Support Vector Machine Approach. Sustainability 2021, 13, 3000. https://doi.org/10.3390/su13063000
González-Castaño C, Marulanda J, Restrepo C, Kouro S, Alzate A, Rodriguez J. Hardware-in-the-Loop to Test an MPPT Technique of Solar Photovoltaic System: A Support Vector Machine Approach. Sustainability. 2021; 13(6):3000. https://doi.org/10.3390/su13063000
Chicago/Turabian StyleGonzález-Castaño, Catalina, James Marulanda, Carlos Restrepo, Samir Kouro, Alfonso Alzate, and Jose Rodriguez. 2021. "Hardware-in-the-Loop to Test an MPPT Technique of Solar Photovoltaic System: A Support Vector Machine Approach" Sustainability 13, no. 6: 3000. https://doi.org/10.3390/su13063000
APA StyleGonzález-Castaño, C., Marulanda, J., Restrepo, C., Kouro, S., Alzate, A., & Rodriguez, J. (2021). Hardware-in-the-Loop to Test an MPPT Technique of Solar Photovoltaic System: A Support Vector Machine Approach. Sustainability, 13(6), 3000. https://doi.org/10.3390/su13063000