
Intersection Signal Timing Optimization: A Multi-Objective Evolutionary Algorithm

 ,
,
Abstract
:1. Introduction
2. Related Work
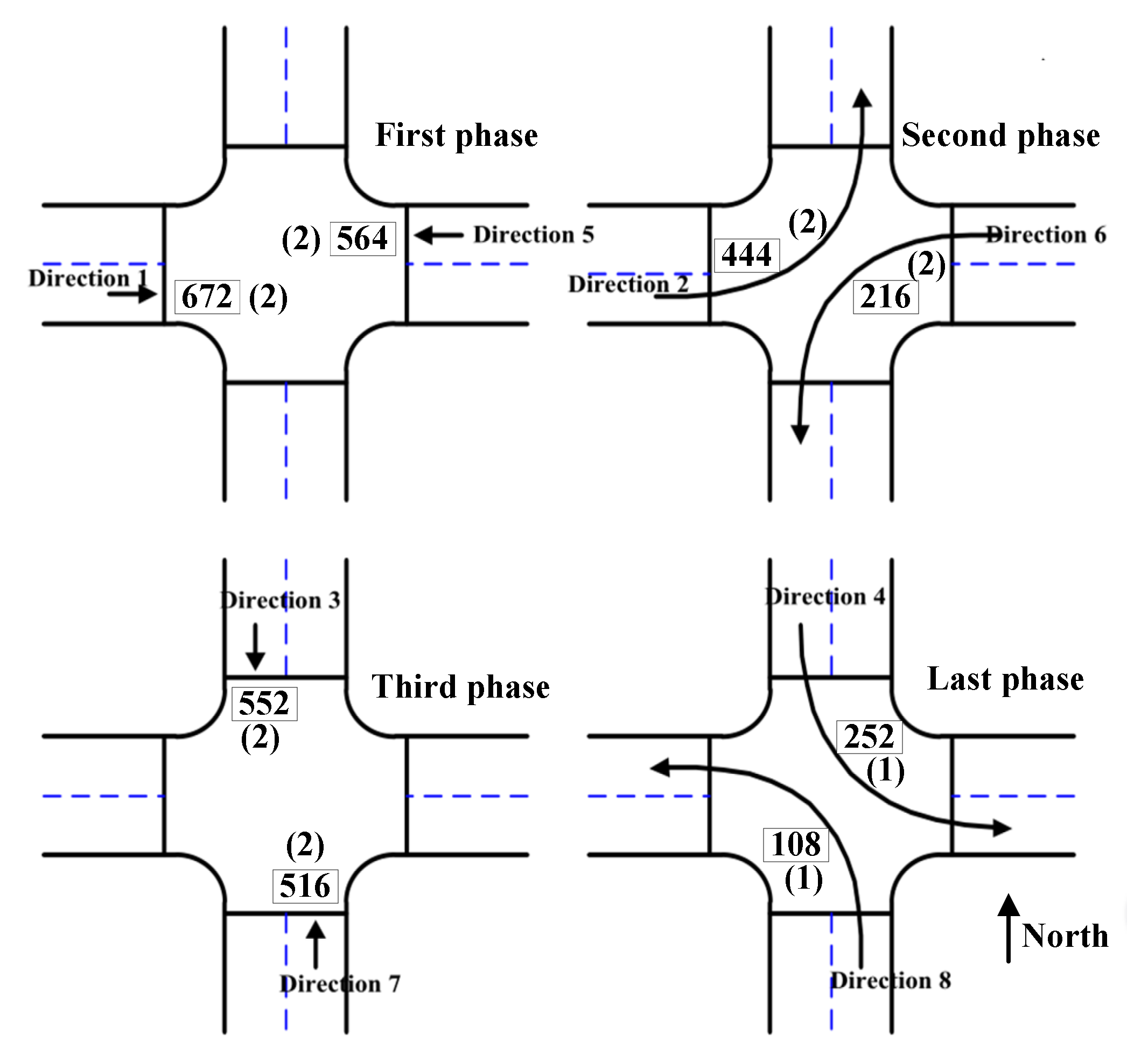
3. Study Scenario and Data Description
4. Methodology
4.1. Construction of Optimization Objective Model
- Delay at signalized intersection
- 2.
- Traffic capacity
- 3.
- Vehicle emissions
- 4.
- Constraint condition
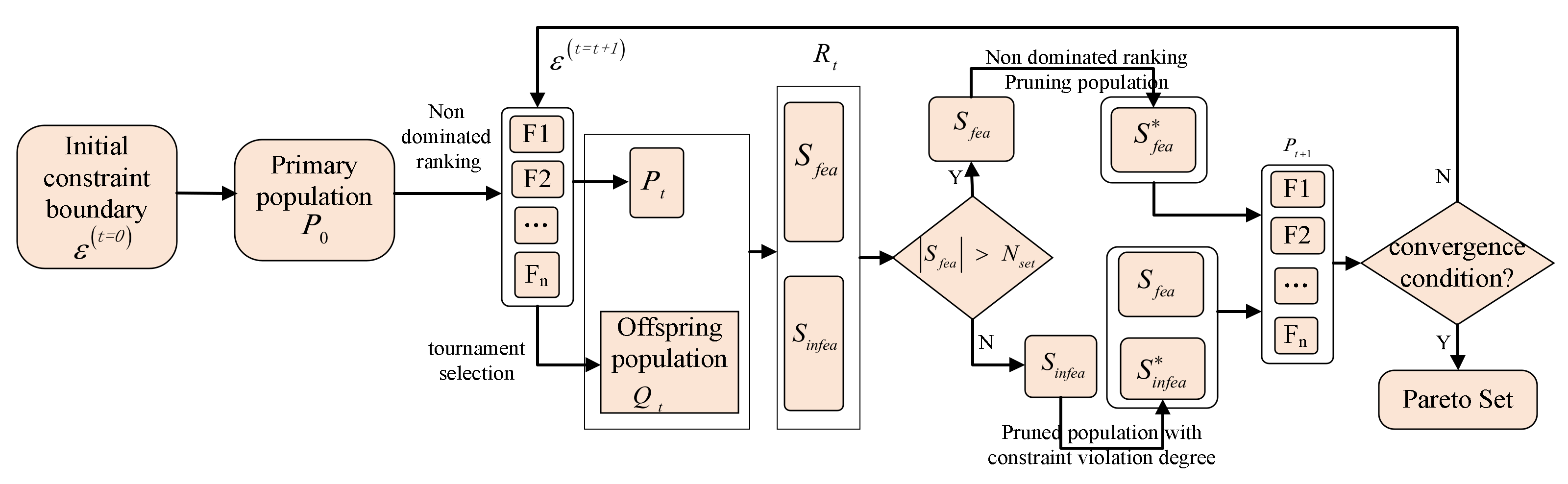
4.2. NSGA-III Algorithm Using Hybrid Constraint Mechanism
- 1.
- Multi-objective non-dominated sorting genetic algorithm (NSGA-III)
| Algorithm 1 General Framework of NSGA-III | |
| 1 | Generate an initial population Pt (t = 0, population size = N) |
| 2 | whilethe Stop Condition is not Satisfieddo |
| 3 | Qt = Tournament Selection Procedure (Pt) |
| 4 | Ut = Pt ∪ Qt (size of Ut = 2N) |
| 5 | Performing nondominated sorting on Ut to form the different non-domination levels (F1,F2,…,Fl,…,Fn) |
| 6 | St = Ø.i = 1 |
| 7 | while |St| < N do |
| 8 | St = St ∪ Fi; i = i + 1; |
| 9 | end while |
| 10 | if |St| = N then |
| 11 | St is directly regarded as the next generation parent population Pt+1 |
| 12 | end if |
| 13 | if |St| > N then |
| 14 | select (N − |F1 ∪ F2 ∪ … ∪ Fl−1|) from Fl to Pt+1 according to the reference points found according to niche technology |
| 15 | end if |
| 16 | end while |
| 17 | return non-dominated solutions Pt+1 |
- 2.
- Hybrid constraint mechanism
5. Results and Discussion
5.1. Comparison of NSGA-II and NSGA-III for Intersection Traffic Signal Timing
5.2. Comparison of HCNSGA-III Timing Scheme with Other Methods
6. Conclusions and Future Prospects
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lei, Y.; Huang, C. Literature review and management expectation on the alleviating urban traffic congestion. China Transp. Rev. 2018, 40, 8–11. [Google Scholar]
- 68% of the World Population Projected to Live in Urban Areas by 2050, Says UN|Department of Economic and Social Affairs. Available online: https://www.un.org/development/desa/en/news/population/2018-revision-of-world-urbanization-prospects.html (accessed on 9 October 2021).
- Wang, Y.; Yang, X.; Liang, H.; Liu, Y. A Review of the Self-Adaptive Traffic Signal Control System Based on Future Traffic Environment. J. Adv. Transp. 2018, 2018 Pt 3, 1096123. [Google Scholar] [CrossRef]
- Chen, G.; Wu, X.; Guo, J.; Meng, J.; Li, C. Global overview for energy use of the world economy: Household-consumption-based accounting based on the world input-output database (WIOD). Energy Econ. 2019, 81, 835–847. [Google Scholar] [CrossRef]
- Beijing Statement of the Second United Nations Global Sustainable Transport Conference, Beijing, China, 14–16 October 2021. Available online: https://www.un.org/sites/un2.un.org/files/gstc2_beijing_statement_16_oct_2021.pdf (accessed on 31 October 2021).
- Liu, S.; Triantis, K.P.; Sarangi, S. A framework for evaluating the dynamic impacts of a congestion pricing policy for a transportation socioeconomic system. Transp. Res. Part A Policy Pract. 2010, 44, 596–608. [Google Scholar] [CrossRef]
- Manual on Uniform Traffic Control Devices for Streets and Highways: MUTCD NPA Webinar Recordings. Available online: https://mutcd.fhwa.dot.gov/mutcd_news.htm#dec_17_20 (accessed on 12 September 2021).
- Chen, P.; Zheng, F.; Lu, G.; Wang, Y. Comparison of Variability of Individual Vehicle Delay and Average Control Delay at Signalized Intersection. Transp. Res. Rec. J. Transp. Res. Board 2016, 2553, 128–137. [Google Scholar] [CrossRef]
- Traffic Signal Timing & Operations Strategies. Available online: https://ops.fhwa.dot.gov/arterial_mgmt/tst_ops.htm (accessed on 18 September 2021).
- Zhao, D.; Dai, Y.; Zhang, Z. Computational intelligence in urban traffic signal control: A survey. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2012, 42, 485–494. [Google Scholar] [CrossRef]
- Qadri, S.; Gke, M.A.; Oner, E. State-of-art review of traffic signal control methods: Challenges and opportunities. Eur. Transp. Res. Rev. 2020, 12, 55. [Google Scholar] [CrossRef]
- Jin, J.; Ma, X.; Kosonen, I. An intelligent control system for traffic lights with simulation-based evaluation. Control. Eng. Pract. 2017, 58, 24–33. [Google Scholar] [CrossRef] [Green Version]
- Vogel, A.; Oremovi, I.; Simi, R.; Ivanjko, E. Improving traffic light control by means of fuzzy logic. In Proceedings of the 60th International Symposium ELMAR-2018, Zadar, Croatia, 16–19 September 2018; pp. 51–56. [Google Scholar] [CrossRef]
- Panovski, D.; Zaharia, T. Simulation-based vehicular traffic lights optimization. In Proceedings of the 2016 12th International Conference on Signal-Image Technology & Internet-Based Systems (SITIS), Naples, Italy, 28 November–1 December 2016; pp. 258–265. [Google Scholar] [CrossRef]
- Hao, W.; Ma, C.X.; Moghimi, B.; Fan, Y.Y.; Gao, Z.B. Robust optimization of signal control parameters for unsaturated intersection based on tabu search-artificial bee colony algorithm. IEEE Access 2018, 6, 32015–32022. [Google Scholar] [CrossRef]
- Elbeltagia, E.; Hegazyb, T.; Griersonb, D. Comparison among five evolutionary-based optimization algorithms. Adv. Eng. Inform. 2005, 19, 43–53. [Google Scholar] [CrossRef]
- Yu, X.; Gen, M. Introduction to Evolutionary Algorithms; Springer: London, UK, 2010; ISBN 978-1-84996-128-8. [Google Scholar]
- Zitzler, E.; Thiele, L.; Laumanns, M.; Fonseca, C.M.; Fonseca, V. Performance assessment of multiobjective optimizers: An analysis and review. IEEE Trans. Evol. Comput. 2003, 7, 117–132. [Google Scholar] [CrossRef] [Green Version]
- Jamal, A.; Rahman, M.T.; Al-Ahmadi, H.M.; Ullah, I.M.; Zahid, M. Intelligent Intersection Control for Delay Optimization: Using Meta-Heuristic Search Algorithms. Sustainability 2020, 12, 1896. [Google Scholar] [CrossRef] [Green Version]
- Mckenney, D.; White, T. Distributed and adaptive traffic signal control within a realistic traffic simulation. Eng. Appl. Artif. Intell. 2013, 26, 574–583. [Google Scholar] [CrossRef]
- Dezani, H.; Marranghello, N.; Damiani, F. Genetic algorithm-based traffic lights timing optimization and routes definition using Petri net model of urban traffic flow. In Proceedings of the 19th World Congress International Federation Automatic Control, Cape Town, South Africa, 24–29 August 2014; pp. 11326–11331. [Google Scholar] [CrossRef] [Green Version]
- Jung, H.; Choi, S.; Park, B.B.; Lee, H.; Son, S.H. Bi-level optimization for eco-traffic signal system. In Proceedings of the International Conference on Connected Vehicles Expo (ICCVE), Seattle, WA, USA, 12–16 September 2016; pp. 29–35. [Google Scholar] [CrossRef]
- Li, X.; Zhao, Z.; Liu, L.; Liu, Y.; Li, P. An optimization model of multi-intersection signal control for trunk road under collaborative information. J. Control. Sci. Eng. 2017, 2017, 2846987. [Google Scholar] [CrossRef] [Green Version]
- Clerc, M.; Kennedy, J. The particle swarm—Explosion, stability, and convergence in a multidimensional complex space. IEEE Trans. Evol. Comput. 2002, 6, 58–73. [Google Scholar] [CrossRef] [Green Version]
- García-Nieto, J.; Alba, E.; Carolina Olivera, A. Swarm intelligence for traffic light scheduling: Application to real urban areas. Eng. Appl. Artif. Intell. 2012, 25, 274–283. [Google Scholar] [CrossRef]
- Garcia-Nieto, J.; Olivera, A.C.; Alba, E. Optimal cycle program of traffic lights with particle swarm optimization. IEEE Trans. Evol. Comput. 2013, 17, 823–839. [Google Scholar] [CrossRef] [Green Version]
- Kou, W.; Chen, X.; Yu, L.; Gong, H. Multiobjective optimization model of intersection signal timing considering emissions based on field data: A case study of Beijing. J. Air Waste Manag. Assoc. 2018, 68, 836–848. [Google Scholar] [CrossRef] [Green Version]
- Baskan, O. A multiobjective bilevel programming model for environmentally friendly traffic signal timings. Adv. Civ. Eng. 2019, 2019, 1638618. [Google Scholar] [CrossRef] [Green Version]
- Pholdee, N.; Bureerat, S. Comparative performance of meta-heuristic algorithms for mass minimization of trusses with dynamic constraints. Adv. Eng. Softw. 2014, 75, 1–13. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Sun, D.; Benekohal, R.F.; Waller, S.T. Multiobjective traffic signal timing optimization using non-dominated sorting genetic algorithm. In Proceedings of the IEEE Intelligent Vehicles Symposium, Columbus, OH, USA, 9–11 June 2003; pp. 198–203. [Google Scholar] [CrossRef]
- Park, B.; Messer, C.; Urbanik, T., II. Traffic signal optimization program for oversaturated conditions: Genetic algorithm approach. Transp. Res. Rec. 1999, 1683, 133–142. [Google Scholar] [CrossRef]
- Li, Y.; Yu, L.; Tao, S.; Chen, K. Multi-objective optimization of traffic signal timing for oversaturated intersection. Math. Probl. Eng. 2013, 2013, 182643. [Google Scholar] [CrossRef]
- Jia, H.; Lin, Y.; Luo, Q.; Li, Y.; Miao, H. Multi-objective optimization of urban road intersection signal timing based on particle swarm optimization algorithm. Adv. Mech. Eng. 2019, 11, 1687814019842498. [Google Scholar] [CrossRef] [Green Version]
- Bechikh, S.; Elarbi, M.; Said, L.B. Many-objective Optimization Using Evolutionary Algorithms: A Survey. In Recent Advances in Evolutionary Multi-Objective Optimization, 1st ed.; Bechikh, S., Datta, R., Gupta, A., Eds.; Springer International Publishing: Cham, Switzerland, 2017; Volume 20, pp. 105–137. Available online: https://www.springer.com/gp/book/9783319429779 (accessed on 1 May 2019).
- Deb, K.; Jain, H. An Evolutionary Many-Objective Optimization Algorithm Using Reference-Point-Based Nondominated Sorting Approach, Part I: Solving Problems with Box Constraints. IEEE Trans. Evol. Comput. 2014, 18, 577–601. [Google Scholar] [CrossRef]
- Michalewicz, Z.; Schoenauer, M. Evolutionary algorithm for constrained parameter optimization problems. Evol. Comput. 1996, 4, 1–32. [Google Scholar] [CrossRef]
- Coello, C.A.C. Theoretical and numerical constraint-handling techniques used with evolutionary algorithms: A survey of the state of the art. Comput. Methods Appl. Mech. Eng. 2002, 191, 1245–1287. [Google Scholar] [CrossRef]
- Mezura-Montes, E.; Coello, C.A.C. Constraint-Handling in nature-inspired numerical optimization: Past, present and future. Swarm Evol. Comput. 2011, 1, 173–194. [Google Scholar] [CrossRef]
- Zeng, S.; Jiao, R.; Li, C.; Wang, R. Constrained optimization by solving equivalent dynamic loosely-constrained multiobjective optimization problem. Int. J. Bio-Inspired Comput. 2019, 13, 86–101. [Google Scholar] [CrossRef]
- Zeng, S.; Jiao, R.; Li, C.; Li, X.; Alkasassbeh, J.S. A general framework of dynamic constrained multiobjective evolutionary algorithms for constrained optimization. IEEE Trans. Cybern. 2017, 47, 2678–2688. [Google Scholar] [CrossRef]
- Akcxelik, R.; Rouphail, N.M. Estimation of delays at traffic signals for variable demand conditions. Transp. Res. B Meth. 1993, 27, 109–131. [Google Scholar] [CrossRef]
- Shafabakhsh, G.; Taghizadeh, S.A.; Kooshki, S.M. Investigation and sensitivity analysis of air pollution caused by road transportation at signalized intersections using IVE model in Iran. Eur. Transp. Res. Rev. 2018, 10, 7. [Google Scholar] [CrossRef] [Green Version]
- Ding, S.; Chen, X.; Yu, L.; Wang, X. Arterial Offset Optimization Considering the Delay and Emission of Platoon: A Case Study in Beijing. Sustainability 2019, 11, 3882. [Google Scholar] [CrossRef] [Green Version]
- Kodjak, D. Policies to Reduce Fuel Consumption, Air Pollution, and Carbon Emissions from Vehicles in G20 Nations. International Council on Clean Transportation. Available online: http://www.indiaenvironmentportal.org.in/content/412517/policies-to-reduce-fuel-consumption-air-pollution-and-carbon-emissions-from-vehicles-in-g20-nations/ (accessed on 8 May 2020).
- Shaheen, S.A.; Lipman, T.E. Reducing greenhouse emissions and fuel consumption. IATSS Res. 2007, 31, 6–20. [Google Scholar] [CrossRef] [Green Version]
- Liao, T.Y. A fuel-based signal optimization model. Transp. Res. Part D Transp. Environ. 2013, 23, 1–8. [Google Scholar] [CrossRef]
- Kwak, J.; Park, B.; Lee, J. Evaluating the impacts of urban corridor traffic signal optimization on vehicle emissions and fuel consumption. Transp. Plan Technol. 2012, 35, 145–160. [Google Scholar] [CrossRef]
- Das, I.; Dennis, J.E. Normal-boundary intersection: A new method for generating the pareto surface in nonlinear multicriteria optimization problems. SIAM J. Optim. 1998, 8, 631–657. [Google Scholar] [CrossRef] [Green Version]
- Rj, A.; Sz, A.; Clb, C. A feasible-ratio control technique for constrained optimization. Inf. Sci. 2019, 502, 201–217. [Google Scholar] [CrossRef]
- Jiang, S.; Ong, Y.; Zhang, J.; Feng, L. Consistencies and contradictions of performance metrics in multiobjective optimization. IEEE Trans. Cybern. 2014, 44, 2391–2404. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Reference | Decision Variable(s) | Optimized Objective(s) | Problem Formulation | Solution Method |
|---|---|---|---|---|
| [21] | Vehicle routes. The green time for each traffic lights. | Time taken to dispatch vehicles. | Network-SO | Integer GA |
| [22] | Length of current green spit. | Total delay | Isolated-SO | Binary GA |
| [23] | The green light time. Phase differences. | The delay | Network-SO | Integer GA |
| [25,26] | Optimized cycle programs | Number of vehicles reaching their destinations. Global trip time. | Network-SO | Integer PSO |
| [27] | Green time of each phase. | Emissions. Total delay. Number of stops. | Network-MO as SO using weights | Integer GA |
| [28] | O-D multipliers. Cycle times. Stage green timings. | Network capacity. Vehicles emissions. | Network-MO as SO using weights | Continuous and integer |
| [33] | The green time for each phase. | Throughput. Queue length. | Isolated-MO | Real-coded NSGA-II |
| [34] | Signal cycle. Green time. | Per capita delay. Vehicle emission. Intersection capacity | Isolated-MO | Integer-IPSO |
| No | The Signal Timing Plans | Delay (s) | Capacity (pcu/h) | Emission (g/h) |
|---|---|---|---|---|
| 1 | {68.1658 69.7081 11.9946 16.5632 170.7807} | 728,820 | 4450 | 10,270 |
| 2 | {53.1881 12.758 75.4945 29.5342 175.7652} | 721,420 | 4270 | 10,180 |
| 3 | {31.5357 51.5544 62.0261 17.2942 165.8719} | 714,430 | 4450 | 10,090 |
| 4 | {26.4569 93.7567 48.9091 23.7874 197.2732} | 894,530 | 4400 | 12,350 |
| 5 | {14.0952 41.8625 75.4945 29.5342 165.8130} | 736,750 | 4230 | 10,370 |
| 6 | {26.2201 66.1706 44.6423 38.6122 180.7325} | 825,870 | 4150 | 11,490 |
| 7 | {68.7607 53.9954 11.9199 23.5186 162.2287} | 689,010 | 4330 | 9780 |
| 8 | {84.9584 58.7558 18.9508 27.4643 194.4299} | 816,070 | 4350 | 11,360 |
| 9 | {30.2102 34.903 68.2779 17.1499 153.7959} | 650,660 | 4430 | 9300 |
| 10 | {67.8421 34.448 9.1593 74.7003 189.9675} | 855,230 | 3760 | 11,850 |
| No | The Signal Timing Plans | Delay (s) | Capacity (pcu/h) | Emission (g/h) |
|---|---|---|---|---|
| 1 | {39.0975 43.0555 73.5753 10.0621 169.4974} | 704,900 | 4550 | 9970 |
| 2 | {36.3100 80.036 35.5746 22.5388 179.1794} | 802,310 | 4370 | 11,190 |
| 3 | {11.6566 103.0964 56.8978 21.6485 197.0691} | 908,260 | 4440 | 12,520 |
| 4 | {37.0027 79.1176 35.6203 22.5388 178.7817} | 798,960 | 4380 | 11,150 |
| 5 | {35.4893 10.4646 114.5714 16.7496 180.5020} | 726,930 | 4490 | 10,250 |
| 6 | {44.2563 78.7388 26.0255 22.6166 175.2643} | 778,540 | 4390 | 10,900 |
| 7 | {42.2068 22.7983 16.0178 72.4447 157.9363} | 732,350 | 3560 | 10,320 |
| 8 | {62.6925 22.5479 37.4215 19.4436 145.564} | 588,910 | 4370 | 8520 |
| 9 | {53.3657 12.9113 15.9612 71.0452 157.9234} | 713,450 | 3580 | 10,080 |
| 10 | {62.3572 57.5751 46.3018 21.8967 192.4912} | 813,620 | 4420 | 11,330 |
| No | The Signal Timing Plans | Delay (s) | Capacity (pcu/h) | Emission (g/h) |
|---|---|---|---|---|
| 1 | {10.4776 21.6493 21.6624 18.7874 76.5761} | 351,130 | 3960 | 5550 |
| 2 | {28.8036 15.5800 14.7789 13.3130 76.4672} | 324,600 | 4130 | 5220 |
| 3 | {34.2579 10.4774 12.1400 18.0794 78.9423} | 332,830 | 4010 | 5320 |
| 4 | {28.9858 11.1999 13.4130 11.8399 69.4260} | 290,260 | 4120 | 4790 |
| 5 | {10.8266 14.2697 19.6550 27.2291 75.9651} | 353,770 | 3690 | 5590 |
| 6 | {15.0242 19.9494 14.4709 16.2260 69.6441} | 315,420 | 3970 | 5110 |
| 7 | {31.0451 20.0957 11.2536 27.0959 93.4617} | 414,960 | 3900 | 6350 |
| 8 | {29.6870 11.5128 12.2332 19.2062 76.5886} | 329,200 | 3950 | 5280 |
| 9 | {20.9733 14.9134 12.9194 16.4478 69.1949} | 305,060 | 3960 | 4980 |
| 10 | {10.4312 10.2325 26.7305 27.7060 79.0254} | 362,600 | 3720 | 5700 |
| The Signal Timing Plan | Delay (s) | Capacity (pcu/h) | Emission (g/h) | |
|---|---|---|---|---|
| Current | {34 30 41 36 161} | 732,100 | 4889 | 12,237 |
| IPSO | {25 20 22 13 100} | 454,130 | 4704 | 11,848 |
| HCNSGA-III | {29 11 13 12 69} | 290,260 | 4120 | 4790 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Fan, X.; Yu, S.; Shan, A.; Fan, S.; Xiao, Y.; Dang, F. Intersection Signal Timing Optimization: A Multi-Objective Evolutionary Algorithm. Sustainability 2022, 14, 1506. https://doi.org/10.3390/su14031506
Zhang X, Fan X, Yu S, Shan A, Fan S, Xiao Y, Dang F. Intersection Signal Timing Optimization: A Multi-Objective Evolutionary Algorithm. Sustainability. 2022; 14(3):1506. https://doi.org/10.3390/su14031506
Chicago/Turabian StyleZhang, Xinghui, Xiumei Fan, Shunyuan Yu, Axida Shan, Shujia Fan, Yan Xiao, and Fanyu Dang. 2022. "Intersection Signal Timing Optimization: A Multi-Objective Evolutionary Algorithm" Sustainability 14, no. 3: 1506. https://doi.org/10.3390/su14031506
APA StyleZhang, X., Fan, X., Yu, S., Shan, A., Fan, S., Xiao, Y., & Dang, F. (2022). Intersection Signal Timing Optimization: A Multi-Objective Evolutionary Algorithm. Sustainability, 14(3), 1506. https://doi.org/10.3390/su14031506