

Life Cycle Analysis of an On-the-Road Modular Vehicle Concept

 , ,
, ,
Abstract
:1. Introduction
- Assessing the environmental impacts of a defined on-the-road modular vehicle fleet from cradle to grave, considering a specific use case.
- Comparing the environmental impacts of the defined otrm vehicle fleet with a reference vehicle fleet for the same use case.
- Identifying the main causes of the environmental impacts.
- Interpreting and communicating the key findings.
2. Materials and Methods
2.1. Compared Vehicles: On-the-Road-Modular U-Shift and Electrified, Automated Reference Fleet
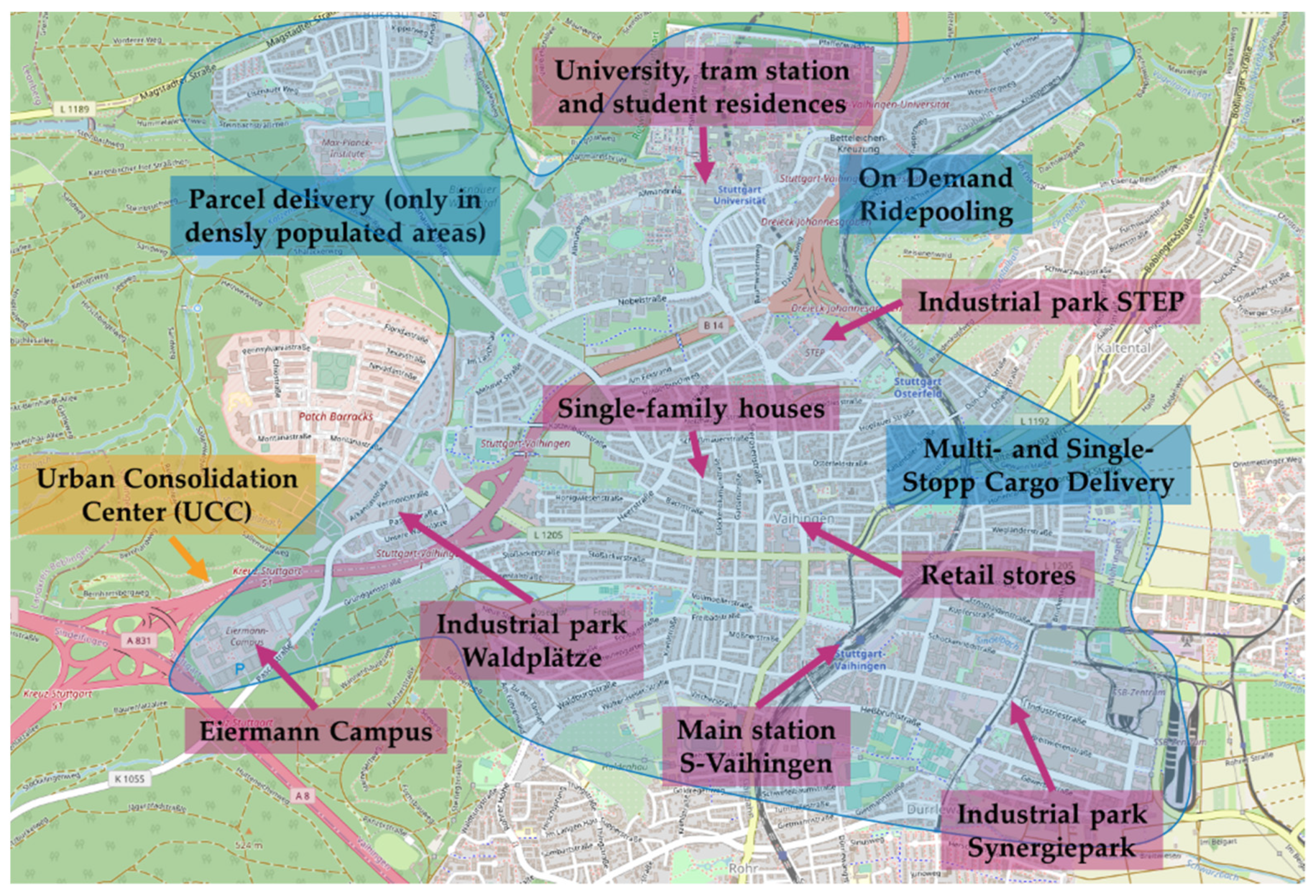
2.2. Use Case: Combined Transport of Cargo and Persons
2.3. Methodology of Life Cycle Assessment
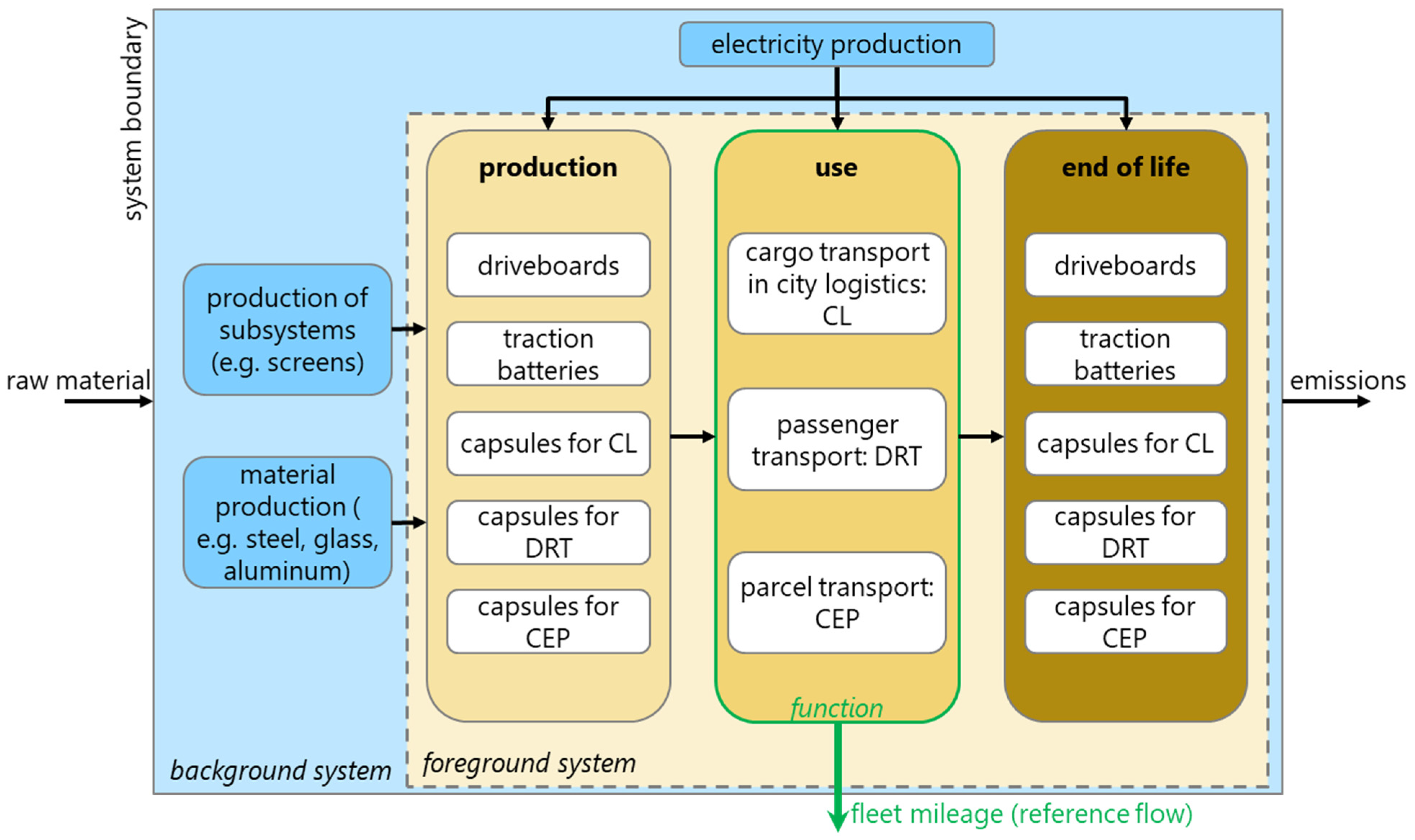
2.4. Scope of the Study
- The cut-off method is considered for data from the ecoinvent database. This corresponds to the European waste hierarchy and favors the use of recycled materials [50].
- The cut-off criterion according to DIN EN ISO 14040 is set at 1% of the mass.
- Road building activities and supplementary infrastructure (automation and charging) are assumed to be similar for all vehicle alternatives and are thus neglected.
- Maintenance of the vehicles is left out, because there are no reliable data for the maintenance of autonomous cars available at the current time.
- climate change,
- terrestrial acidification,
- human toxicity,
- photochemical oxidant formation,
- particulate matter formation,
- water depletion,
- mineral resource depletion.
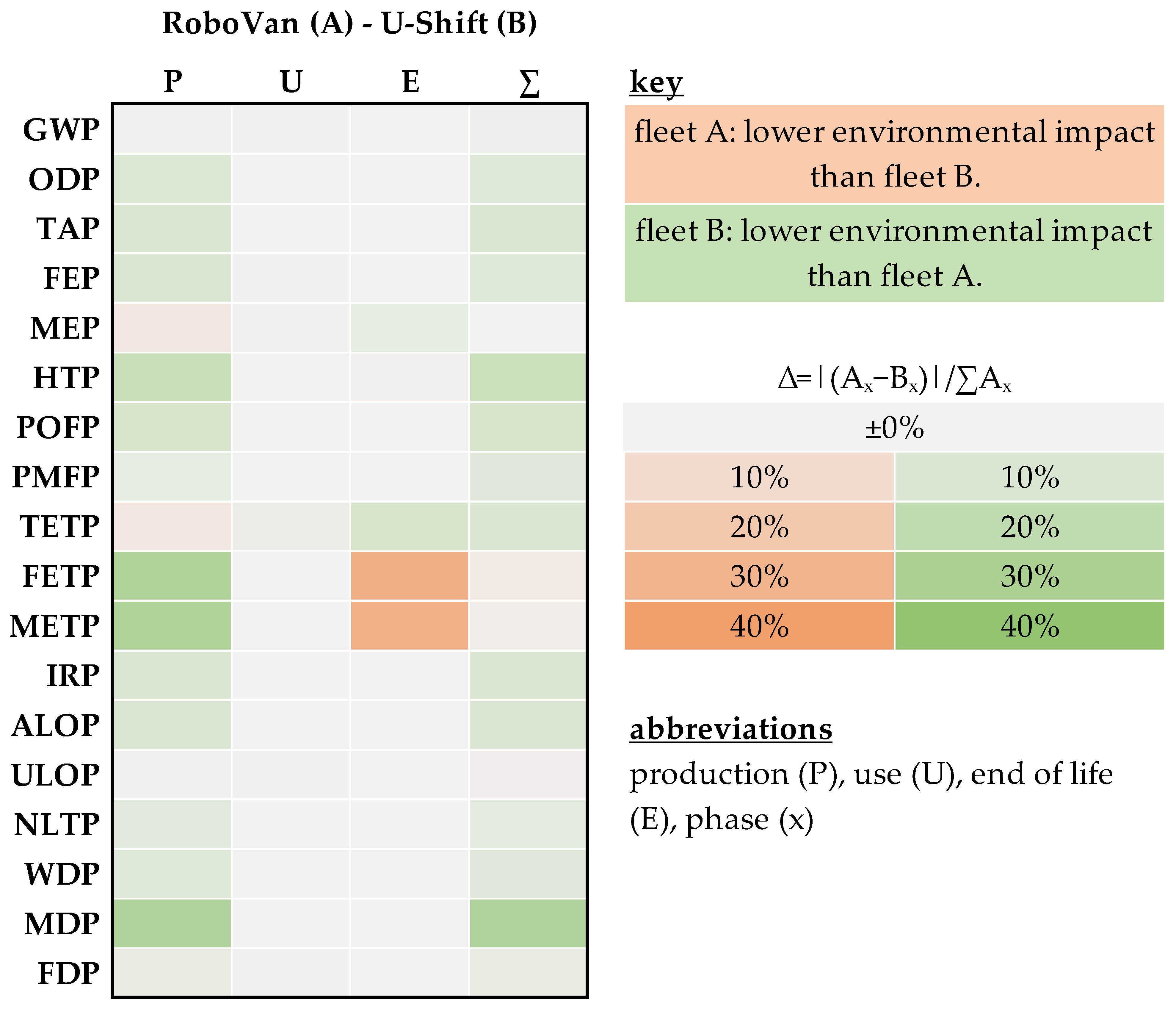
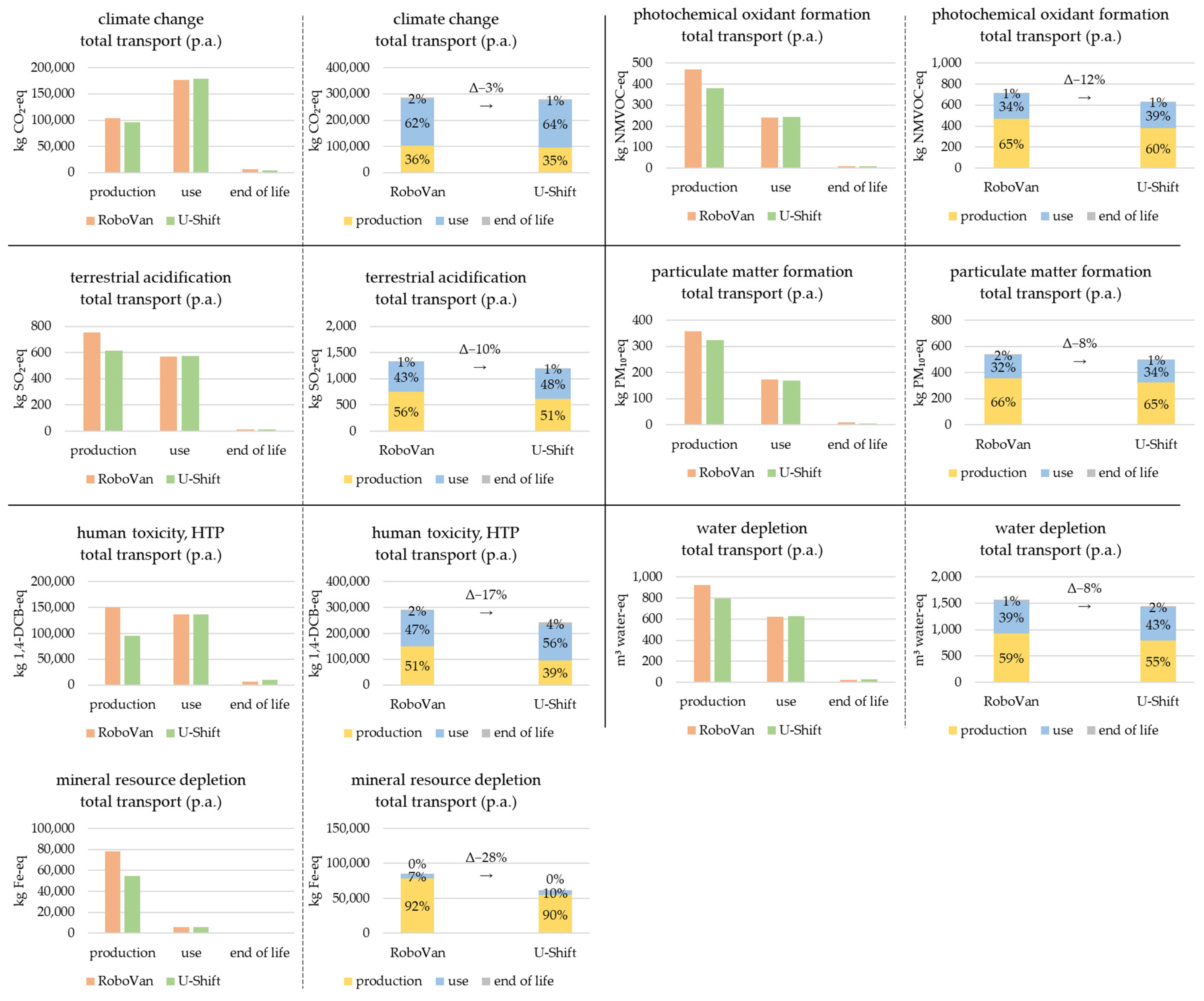
3. Results
4. Discussion
4.1. Deployment Scenarios
4.2. Use Phase and Lifetime
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- ACEA. ACEA’s 10-Point Plan to Help Implement the European Green Deal; ACEA: Brussels, Belgium, 2020. [Google Scholar]
- EEA. Share of Transport GHG Emissions for Road Transport; European Environment Agency (EEA): Copenhagen, Denmark, 2019. [Google Scholar]
- EEA. Share of Transport GHG Emissions; European Environment Agency (EEA): Copenhagen, Denmark, 2019. [Google Scholar]
- Bundesministerium für Umwelt, Naturschutz und Nukleare Sicherheit. Der Klimaschutzplan 2050. 2016. Available online: https://www.bmwk.de/Redaktion/DE/Publikationen/Industrie/klimaschutzplan-2050.html (accessed on 25 October 2022).
- International Transport Forum (ITF). ITF Transport Outlook 2021; OECD Publishing: Paris, France, 2021; ISBN 9789282114087. [Google Scholar]
- United Nations. World Urbanization Prospects: The 2018 Revision; Key Facts; United Nations: New York, NY, USA, 2018. [Google Scholar]
- Bundesverband Paket und Expresslogistik e. V. (BIEK); KE-CONSULT Kurte & Esser GbR. KEP-Studie 2022—Analyse des Marktes in Deutschland; Bundesverband Paket und Expresslogistik e. V.: Berlin, Germany, 2022. [Google Scholar]
- European Commission. A European Green Deal. 2019. Available online: https://ec.europa.eu/info/strategy/priorities-2019-2024/european-green-deal_en (accessed on 22 April 2020).
- Volocopter GmbH. Solutions. Available online: https://www.volocopter.com/solutions/ (accessed on 25 October 2022).
- Parallel Systems. Product–Parallel. Available online: https://moveparallel.com/product/ (accessed on 25 October 2022).
- Rolls-Royce. Autonomous Ships: The Next Ship; Rolls-Royce: Manchester, UK, 2016. [Google Scholar]
- Münster, M.; Schäffer, M.; Sturm, R.; Friedrich, H.E. Methodological development from vehicle concept to modular body structure for the DLR NGC-Urban Modular Vehicle. In 16 Internationales Stuttgarter Symposium; Bargende, M., Reuss, H.-C., Wiedemann, J., Eds.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2016; pp. 581–595. ISBN 978-3-658-13254-5/978-3-658-13255-2. [Google Scholar]
- Münster, M. Vorgehensmodell zur Grundkonzeption Eines Fahrzeugkonzepts und Entwicklung Neuartiger Kraftflussoptimierter Karosseriestrukturen für Elektrifizierte Fahrzeuge. Ph.D. Thesis, Universität Stuttgart, Stuttgart, Germany, 2020. [Google Scholar]
- Ulrich, C.; Friedrich, H.E.; Weimer, J.; Schmid, S.A. New Operating Strategies for an On-the-Road Modular, Electric and Autonomous Vehicle Concept in Urban Transportation. World Electr. Veh. J. 2019, 10, 91. [Google Scholar] [CrossRef] [Green Version]
- Deutsches Zentrum für Luft- und Raumfahrt e. V. NGC Urban Modular Vehicle. Available online: https://verkehrsforschung.dlr.de/de/projekte/ngc-umv (accessed on 25 October 2022).
- NAVYA. Self-Driving Shuttle for Passenger Transportation. Available online: https://navya.tech/en/solutions/moving-people/self-driving-shuttle-for-passenger-transportation/ (accessed on 25 October 2022).
- MOOVE. People Mover L4. Available online: https://www.moove.biz/de/people-mover-l4-the-moove/ (accessed on 25 October 2022).
- Toyota. e-Palette. Available online: https://www.toyota-europe.com/startyourimpossible/e-palette (accessed on 25 October 2022).
- MOOVE. Cargo Mover 11 L4. Available online: https://www.moove.biz/de/cargo-mover-11-l4-the-moove/ (accessed on 25 October 2022).
- Ulrich, C.; Friedrich, H.E.; Weimer, J.; Hahn, R.; Kopp, G.; Münster, M. Technologies for a modular vehicle concept used in passenger and goods transport. In 19. Internationales Stuttgarter Symposium; Bargende, M., Reuss, H.-C., Wagner, A., Wiedemann, J., Eds.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2019; pp. 587–598. ISBN 978-3-658-25938-9/978-3-658-25939-6. [Google Scholar]
- Meinhardt, S.; Schlenther, T.; Martins-Turner, K.; Maciejewski, M. Simulation of On-Demand Vehicles that Serve both Person and Freight Transport. In Proceedings of the The 13th International Conference on Ambient Systems, Networks and Technologies (ANT), Porto, Portugal, 15–17 March 2022. [Google Scholar]
- Münster, M.; Brost, M.; Siefkes, T.; Kopp, G.; Beeh, E.; Rinderknecht, F.; Schmid, S.; Osebek, M.; Scheibe, S.; Hahn, R.; et al. U-Shift II Vision and Project Goals. In 22. Internationales Stuttgarter Symposium: Automobil- und Motorentechnik, 1st ed.; Bargende, M., Reuss, H.-C., Wagner, A., Eds.; Springer Fachmedien Wiesbaden; Imprint Springer Vieweg: Wiesbaden, Germany, 2022; pp. 18–31. ISBN 978-3-658-37010-7. [Google Scholar]
- Rinspeed AG. Snap. Available online: https://www.rinspeed.com/de/Snap_48_concept-car.html (accessed on 25 October 2022).
- Rinspeed AG. microSNAP. Available online: https://www.rinspeed.com/de/microSNAP_50_concept-car.html#l1 (accessed on 25 October 2022).
- Österle, I.; Ulrich, C.; Herwartz-Polster, S.; Sigle, S.; Weimer, J.; Conzelmann, M.; Fleck, T.; Zofka, M. Benefits and costs of shared, modular automated vehicles for freight and passenger transport: The case of U-Shift. Transp. Plan. Technol. 2022, 45, 203–225. [Google Scholar] [CrossRef]
- Schall, P.; Sigle, S.; Ulrich, C. Design Strategy for a Distributed Energy Storage in a Modular Mover. In Proceedings of the 2021 Sixteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 5–7 May 2021; pp. 1–5, ISBN 978-1-6654-4902-1. [Google Scholar]
- Neef, M.; Dettmer, T.; Schebek, L. Comparing Carbon Performances of Mobility Services and Private Vehicles from a Life Cycle Perspective. In Progress in Life Cycle Assessment 2018; Springer: Berlin/Heidelberg, Germany, 2018; pp. 47–60. [Google Scholar]
- OECD; ITF. Urban Mobility System Upgrade: How Shared Self-Driving Cars Could Change City Traffic; International Transport Forum: Paris, France, 2015. [Google Scholar]
- Igliński, H.; Babiak, M. Analysis of the Potential of Autonomous Vehicles in Reducing the Emissions of Greenhouse Gases in Road Transport. Procedia Eng. 2017, 192, 353–358. [Google Scholar] [CrossRef]
- Greenblatt, J.B.; Saxena, S. Autonomous taxis could greatly reduce greenhouse-gas emissions of US light-duty vehicles. Nat. Clim. Chang. 2015, 5, 860–863. [Google Scholar] [CrossRef]
- Pakusch, C.; Stevens, G.; Boden, A.; Bossauer, P. Unintended Effects of Autonomous Driving: A Study on Mobility Preferences in the Future. Sustainability 2018, 10, 2404. [Google Scholar] [CrossRef] [Green Version]
- Statistisches Bundesamt. Unfallentwicklung auf Deutschen Straßen 2017; Statistisches Bundesamt: Wiesbaden, Germany, 2018; Available online: https://www.destatis.de/DE/Presse/Pressekonferenzen/2018/Verkehrsunfaelle-2017/pressebroschuere-unfallentwicklung.pdf?__blob=publicationFile (accessed on 11 February 2020).
- Gawron, J.H.; Keoleian, G.A.; de Kleine, R.D.; Wallington, T.J.; Kim, H.C. Life Cycle Assessment of Connected and Automated Vehicles: Sensing and Computing Subsystem and Vehicle Level Effects. Environ. Sci. Technol. 2018, 52, 3249–3256. [Google Scholar] [CrossRef]
- Frischknecht, R.; Bauer, C.; Froemelt, A.; Hellweg, S.; Biemann, K.; Buetler, T.; Cox, B.; de Haan, P.; Hoerl, S.; Itten, R.; et al. LCA of mobility solutions: Approaches and findings—66th LCA forum, Swiss Federal Institute of Technology, Zurich, 30 August, 2017. Int. J. Life Cycle Assess. 2018, 23, 381–386. [Google Scholar] [CrossRef]
- Egede, P.; Dettmer, T.; Herrmann, C.; Kara, S. Life Cycle Assessment of Electric Vehicles—A Framework to Consider Influencing Factors. Procedia CIRP 2015, 29, 233–238. [Google Scholar] [CrossRef]
- Dai, Q.; Kelly, J.C.; Gaines, L.; Wang, M. Life Cycle Analysis of Lithium-Ion Batteries for Automotive Applications. Batteries 2019, 5, 48. [Google Scholar] [CrossRef] [Green Version]
- Tagliaferri, C.; Evangelisti, S.; Acconcia, F.; Domenech, T.; Ekins, P.; Barletta, D.; Lettieri, P. Life cycle assessment of future electric and hybrid vehicles: A cradle-to-grave systems engineering approach. Chem. Eng. Res. Des. 2016, 112, 298–309. [Google Scholar] [CrossRef]
- Paulino, F.; Pina, A.; Baptista, P. Evaluation of Alternatives for the Passenger Road Transport Sector in Europe: A Life-Cycle Assessment Approach. Environments 2018, 5, 21. [Google Scholar] [CrossRef] [Green Version]
- Keyvanfar, A.; Shafaghat, A.; Muhammad, N.; Ferwati, M. Driving Behaviour and Sustainable Mobility—Policies and Approaches Revisited. Sustainability 2018, 10, 1152. [Google Scholar] [CrossRef] [Green Version]
- Matheys, J.; van Autenboer, W.; Timmermans, J.-M.; Van Mierlo, J.; van den Bossche, P.; Maggetto, G. Influence of functional unit on the life cycle assessment of traction batteries. Int. J. Life Cycle Assess. 2007, 12, 191–196. [Google Scholar] [CrossRef]
- Zhao, Y.; Onat, N.C.; Kucukvar, M.; Tatari, O. Carbon and energy footprints of electric delivery trucks: A hybrid multi-regional input-output life cycle assessment. Transp. Res. Part D Transp. Environ. 2016, 47, 195–207. [Google Scholar] [CrossRef]
- Cox, B.; Mutel, C.L.; Bauer, C.; Mendoza Beltran, A.; van Vuuren, D.P. Uncertain Environmental Footprint of Current and Future Battery Electric Vehicles. Environ. Sci. Technol. 2018, 52, 4989–4995. [Google Scholar] [CrossRef] [PubMed]
- Deutsches Zentrum für Luft- und Raumfahrt e. V. U-Shift. Available online: https://verkehrsforschung.dlr.de/de/projekte/u-shift (accessed on 25 October 2022).
- Mercedes-Benz. eSprinter | Elektro Transporter. Available online: https://www.mercedes-benz.de/vans/de/sprinter/e-sprinter-panel-van (accessed on 25 October 2022).
- Ecoinvent. Home. Available online: https://ecoinvent.org/ (accessed on 25 October 2022).
- Grünhäuser, M.; Wiemer, A.; Brunßen, A.; Zofka, M.; Fleck, T.; Conzelman, M.; Ulrich, C.; Brost, M.; Österle, I.; Münster, M.; et al. Machbarkeitsstudie Zulassungsfähigkeit und Wirtschaftlichkeit. 2020. Available online: https://verkehrsforschung.dlr.de/public/documents/2020/Machbarkeitsstudie_U-Shift_MAD.pdf (accessed on 3 June 2021).
- DIN Deutsches Institut für Normung e., V. Umweltmanagement–Ökobilanz–Grundsätze und Rahmenbedingungen; Beuth Verlag GmbH: Berlin, Germany, 2021. [Google Scholar]
- DIN Deutsches Institut für Normung e., V. Umweltmanagement–Ökobilanz–Anforderungen und Anleitungen; Beuth Verlag GmbH: Berlin, Germany, 2021. [Google Scholar]
- Hauschild, M.Z. Introduction to LCA Methodology. In Life Cycle Assessment-Theory and Practice; Springer International Publishing AG: Cham, Switzerlan, 2018; pp. S.59–S.66. [Google Scholar]
- Suski, P.; Wiesen, K. Einsatz von Sekundärmaterial vs. recyclinggerechtes Design: Diskussion verschiedener End-of-Life-Allokationen unter Berücksichtigung der europäischen Abfallhierarchie. Umw. Wirtsch. Forum 2016, 24, 7–13. [Google Scholar] [CrossRef] [Green Version]
- Casals, L.C.; García, B.A.; Aguesse, F.; Iturrondobeitia, A. Second life of electric vehicle batteries: Relation between materials degradation and environmental impact. Int. J. Life Cycle Assess. 2017, 22, 82–93. [Google Scholar] [CrossRef]
- Hawkins, T.R.; Gausen, O.M.; Strømman, A.H. Environmental impacts of hybrid and electric vehicles—A review. Int. J. Life Cycle Assess. 2012, 17, 997–1014. [Google Scholar] [CrossRef]
- Notter, D.A.; Gauch, M.; Widmer, R.; Wäger, P.; Stamp, A.; Zah, R.; Althaus, H.-J. Contribution of Li-ion batteries to the environmental impact of electric vehicles. Environ. Sci. Technol. 2010, 44, 6550–6556. [Google Scholar] [CrossRef]
- Del Duce, A.; Gauch, M.; Althaus, H.-J. Electric passenger car transport and passenger car life cycle inventories in ecoinvent version 3. Int. J. Life Cycle Assess. 2016, 21, 1314–1326. [Google Scholar] [CrossRef]
- Simons, A. Road transport: New life cycle inventories for fossil-fuelled passenger cars and non-exhaust emissions in ecoinvent v3. Int. J. Life Cycle Assess. 2013, 21, 1299–1313. [Google Scholar] [CrossRef]
- Goedkoop, M.; Heijungs, R.; Huijbregts, M.; Schryver, A.D.; Struijs, J.; Zelm, R.V. ReCiPe 2008: A Life Cycle Impact Assessment Method Which Comprises Harmonised Category Indicators at the Midpoint and the Endpoint Level; Report I: Characterisation; Ministerie van VROM: The Hague, The Netherlands, 2009. [Google Scholar]
- Hill, N.; Amaral, S.; Morgan-Price, S.; Nokes, T.; Bates, J.; Helms, H.; Fehrenbach, H.; Biemann, K.; Abdalla, N.; Jöhrens, J.; et al. Determining the Environmental Impacts of Conventional and Alternatively Fuelled Vehicles through LCA: Final Report; Publications Office of the European Union: Luxembourg, 2020; ISBN 9789276203018. [Google Scholar]
- Temporelli, A.; Carvalho, M.L.; Girardi, P. Life Cycle Assessment of Electric Vehicle Batteries: An Overview of Recent Literature. Energies 2020, 13, 2864. [Google Scholar] [CrossRef]
- Girardi, P.; Gargiulo, A.; Brambilla, P.C. A comparative LCA of an electric vehicle and an internal combustion engine vehicle using the appropriate power mix: The Italian case study. Int. J. Life Cycle Assess. 2015, 20, 1127–1142. [Google Scholar] [CrossRef]
- Vilaça, M.; Santos, G.; Oliveira, M.S.; Coelho, M.C.; Correia, G.H. Life cycle assessment of shared and private use of automated and electric vehicles on interurban mobility. Appl. Energy 2022, 310, 118589. [Google Scholar] [CrossRef]
- Schlesinger, M.; Lindenberger, D.; Lutz, C. Entwicklung der Energiemärkte: Energiereferenzprognose; Projekt Nr. 57/12; Prognos AG: Basel, Switzerland, 2014. [Google Scholar]
- Brost, M.; Deniz, Ö.; Österle, I.; Ulrich, C.; Senzeybek, M.; Hahn, R.; Schmid, S. Energy Consumption of Connected and Automated Vehicles. In Encyclopedia of Sustainability Science and Technology; Meyers, R.A., Ed.; Springer New York: New York, NY, USA, 2020; pp. 1–24. ISBN 978-1-4939-2493-6. [Google Scholar]
- Wadud, Z.; MacKenzie, D.; Leiby, P. Help or hindrance? The travel, energy and carbon impacts of highly automated vehicles. Transp. Res. Part A Policy Pract. 2016, 86, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Lieberei, J.; Gheewala, S.H. Resource depletion assessment of renewable electricity generation technologies—Comparison of life cycle impact assessment methods with focus on mineral resources. Int. J. Life Cycle Assess. 2017, 22, 185–198. [Google Scholar] [CrossRef]
- Hatzenbühler, J.; Jenelius, E.; Gidófalvi, G.; Cats, O. Modular Vehicle Routing for Combined Passenger and Freight Transport: Preprint. In TR-A–Special Issue: Integration of Passenger and Freight Transport; Elsevier: Amsterdam, The Netherlands, 2022. [Google Scholar]
- Friedrich, H.E. (Ed.) Leichtbau in der Fahrzeugtechnik, 2nd ed.; Springer: Wiesbaden/Heidelberg, Germany, 2017; ISBN 3658122943. [Google Scholar]
- Toniolo, S.; Tosato, R.C.; Gambaro, F.; Ren, J. Life cycle thinking tools: Life cycle assessment, life cycle costing and social life cycle assessment. In Life Cycle Sustainability Assessment for Decision-Making; Elsevier: Amsterdam, The Netherlands, 2020; pp. 39–56. ISBN 9780128183557. [Google Scholar]
- Glogic, E.; Sonnemann, G.; Young, S.B. Environmental Trade-Offs of Downcycling in Circular Economy: Combining Life Cycle Assessment and Material Circularity Indicator to Inform Circularity Strategies for Alkaline Batteries. Sustainability 2021, 13, 1040. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | RoboVan (Reference) | U-Shift |
|---|---|---|
| Vehicle fleet | PT: 21 CT: 18 | 21 driveboards |
| Capsule fleet | n. a. | PT: 21 CT: 159 |
| Annual mileage of 1 vehicle/driveboard | PT: 28,000 km CT: 24,000 km | 47,000 km |
| Parameter | RoboVan (Reference) | U-Shift |
|---|---|---|
| Vehicle fleet | 39 | 21 driveboards 180 capsules |
| Lifetime mileage | 325,000 km (results in 11 (PT) and 14 (CT) years) | 325,000 km (results in 7 years) |
| Capsule lifetime | n. a. | PT: 17 years CT: 23 years |
| Traction battery | PT: 60 kWh CT: 80 kWh | Driveboard: 65 kWh PT-capsule: 35 kWh (for air condition, infotainment and traction support) |
| Battery lifetime | 200,000 km or 8 years | 200,000 km or 8 years |
| Annual fleet mileage | PT: 594,000 km CT: 426,000 km | PT: 594,000 km CT: 394,000 km |
| Electricity mix | 70% renewables | 70% renewables |
| Reference flow (mileage p.a.) | 1.02 million km | 0.99 million km |
| Input Material | Quantity | Output Material | Quantity |
|---|---|---|---|
| Battery (capsule) | 0.28 kg | Brake abrasion | 0.002 kg |
| Capsule | 2.06 kg | Road wear | 0.02 kg |
| Driveboard | 1.93 kg | Tire abrasion | 0.10 kg |
| Electricity | 290.91 kWh | Passenger transport | 593.69 km |
| Traction battery (Driveboard) | 0.55 kg |
| Input Material | Quantity | Output Material | Quantity |
|---|---|---|---|
| Electricity | 308.72 kWh | Brake abrasion | 0.002 kg |
| Traction battery | 0.87 kg | Road wear | 0.02 kg |
| Vehicle | 5.52 kg | Tire abrasion | 0.11 kg |
| Passenger transport | 593.69 km |
| Impact Category | Indicator | Unit |
|---|---|---|
| climate change (CC) * | global warming potential (GWP) | kg CO₂-eq |
| ozone depletion (OD) | ozone depletion potential (ODP) | kg CFC-11-eq |
| terrestrial acidification (TA) * | terrestrial acidification potential (TAP) * | kg SO₂-eq |
| freshwater eutrophication (FE) | freshwater eutrophication potential (FEP) | kg P-eq |
| marine eutrophication (ME) | marine eutrophication potential (MEP) | kg N-eq |
| human toxicity (HT) * | human toxicity potential (HTP) | kg 1,4-DCB-eq |
| photochemical oxidant formation (POF) * | photochemical oxidant formation potential (POFP) | kg NMVOC-eq |
| particulate matter formation (PMF) * | particulate matter formation potential (PMFP) | kg PM₁₀-eq |
| terrestrial ecotoxicity (TET) | terrestrial ecotoxicity potential (TETP) | kg 1,4-DCB-eq |
| freshwater ecotoxicity (FET) | freshwater ecotoxicity potential (FETP) | kg 1,4-DCB-eq |
| marine ecotoxicity (MET) | marine ecotoxicity potential (METP) | kg 1,4-DCB-eq |
| ionizing radiation (IR) | ionizing radiation potential (IRP) | kg U235-eq |
| agricultural land occupation (ALO) | agricultural land occupation potential (ALOP) | m2 p. a. |
| urban land occupation (ULO) | urban land occupation potential (ULOP) | m2 p. a. |
| natural land transformation (NLT) | natural land transformation potential (NLTP) | m2 |
| water depletion (WD) * | water depletion potential (WDP) | m3 water-eq |
| mineral resource depletion (MRD) * | mineral depletion potential (MDP) | kg Fe-eq |
| fossil resource depletion (FD) | fossil depletion potential (FDP) | kg oil-eq |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ulrich, C.; Feinauer, M.; Bieber, K.; Schmid, S.A.; Friedrich, H.E. Life Cycle Analysis of an On-the-Road Modular Vehicle Concept. Sustainability 2023, 15, 10303. https://doi.org/10.3390/su151310303
Ulrich C, Feinauer M, Bieber K, Schmid SA, Friedrich HE. Life Cycle Analysis of an On-the-Road Modular Vehicle Concept. Sustainability. 2023; 15(13):10303. https://doi.org/10.3390/su151310303
Chicago/Turabian StyleUlrich, Christian, Mario Feinauer, Katharina Bieber, Stephan A. Schmid, and Horst E. Friedrich. 2023. "Life Cycle Analysis of an On-the-Road Modular Vehicle Concept" Sustainability 15, no. 13: 10303. https://doi.org/10.3390/su151310303
APA StyleUlrich, C., Feinauer, M., Bieber, K., Schmid, S. A., & Friedrich, H. E. (2023). Life Cycle Analysis of an On-the-Road Modular Vehicle Concept. Sustainability, 15(13), 10303. https://doi.org/10.3390/su151310303