
Enhancing Precision of Crop Farming towards Smart Cities: An Application of Artificial Intelligence



Abstract
:1. Introduction
1.1. Background on Precision Agriculture
1.2. Need for Sustainable Farming Practices
1.3. Introduction to Deep Reinforcement Learning (DRL)
2. Literature Review
3. Deep Reinforcement Learning
3.1. Overview of Deep Reinforcement Learning
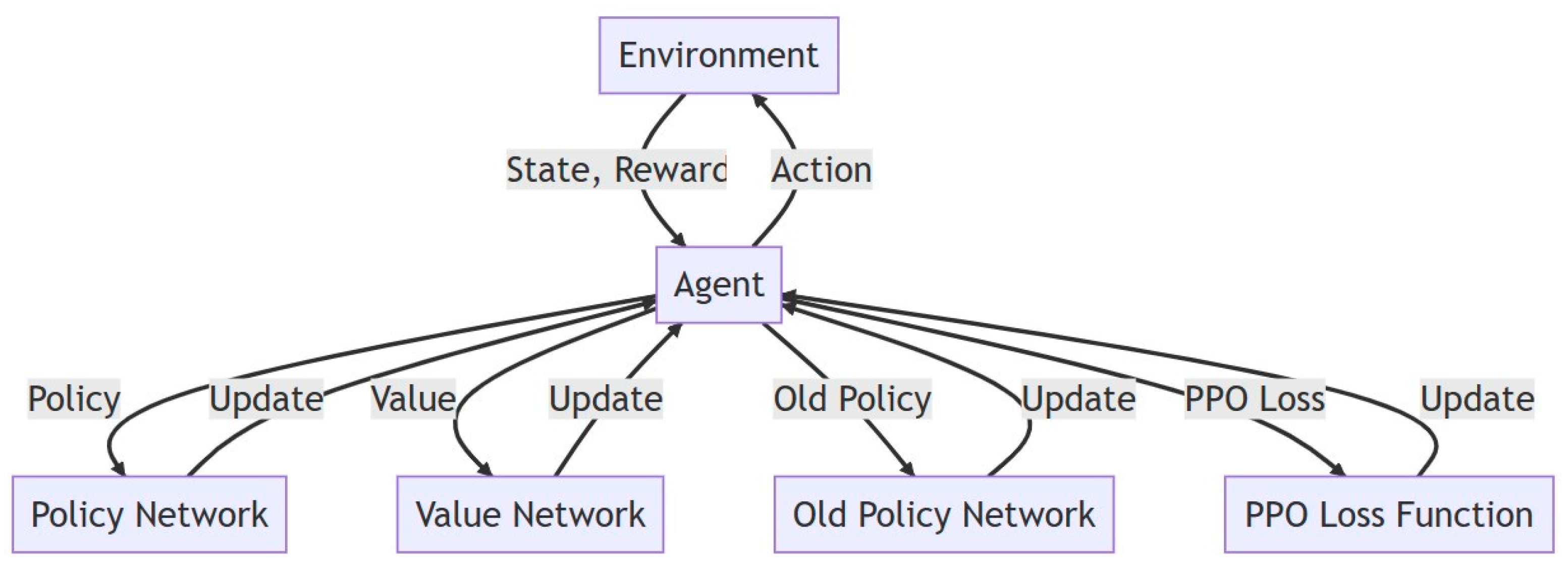
3.2. Proximal Policy Optimization (PPO) Algorithm
- First, by interacting with the environment while employing the present policy, data are gathered.
- Second, the policy is optimized by maximizing an objective function.
- Sample Effectiveness: PPO is renowned for its sample effectiveness. Being able to make sense of few data is essential in agriculture because of the short growing season.
- Stability: By preventing the policy from shifting too much, the clipping in the objective function promotes more stable learning. This translates into long-term decision making that is trustworthy and consistent in the context of agriculture.
- Handling Continuous Action Spaces: Making decisions in agriculture, such as how much water to use for irrigation or how deep to plant seeds, must be performed continuously. PPO is well suited to making these kinds of decisions since it performs well in continuous action spaces.
- Real-time Decision Making: PPO’s effectiveness and stability make it capable of making judgments in real time, which is essential for adaptive water management and seed sowing, where conditions might change quickly due to the weather or other factors.
4. Autonomous Agricultural Robot
4.1. Robot Design and Components
4.2. Power Management
- Energy Monitoring System:
- 2.
- Automated Recharging Stations:
- 3.
- Battery Health Management:
4.3. Sensor Integration
4.3.1. Soil Moisture Sensors
4.3.2. Weather Sensors
4.3.3. Global Positioning System (GPS)
4.4. Integration of PPO in the Robot
4.4.1. Data Acquisition and Preprocessing
4.4.2. Action Execution and Feedback
4.4.3. Reward Calculation and Policy Update
4.4.4. Mathematical Optimization for Resource Consumption
- Soil Moisture: Agrorobotix measures the moisture level of the soil, aiming for an optimal range that ensures adequate water for the crops without over-irrigation. The closer the soil moisture is to this optimal range, the higher the reward received.
- Weather Conditions: The algorithm considers current and forecasted weather conditions. Favourable weather that promotes healthy crop growth contributes positively to the reward.
- Seed Sowing Depth: The accuracy of the seed sowing depth, as per the agronomic standards for different crops, influences . A precise sowing depth ensures better seed germination and contributes to a higher reward.
| Algorithm 1: Proximal Policy Optimization (PPO) | |
| 1: | Initialize policy parameters |
| 2: | Initialize optimizer for |
| 3: | Initialize empty memory for storing trajectories |
| 4: | for iteration = 1, 2, …, N do |
| 5: | for = 1, 2, … do |
| 6: | Observe state from sensors |
| 7: | Select action with probability |
| 8: | Execute action (drill, sow, flatten, sprinkle) |
| 9: | Observe reward and new state |
| 10: | Store in memory |
| 11: | end for |
| 12: | for epoch = 1 to do |
| 13: | for (, , ) in memory do |
| 14: | Compute advantage estimate |
| 15: | Compute old action probability |
| 16: | Update policy parameters by optimizing surrogate objective: |
| 17: | |
| 18: | |
| 19: | |
| 20: | Perform gradient ascent step on |
| 21: | end for |
| 22: | end for |
| 23: | Clear memory |
| 24: | end for |
5. Experimental Setup
5.1. Description of the Test Farm
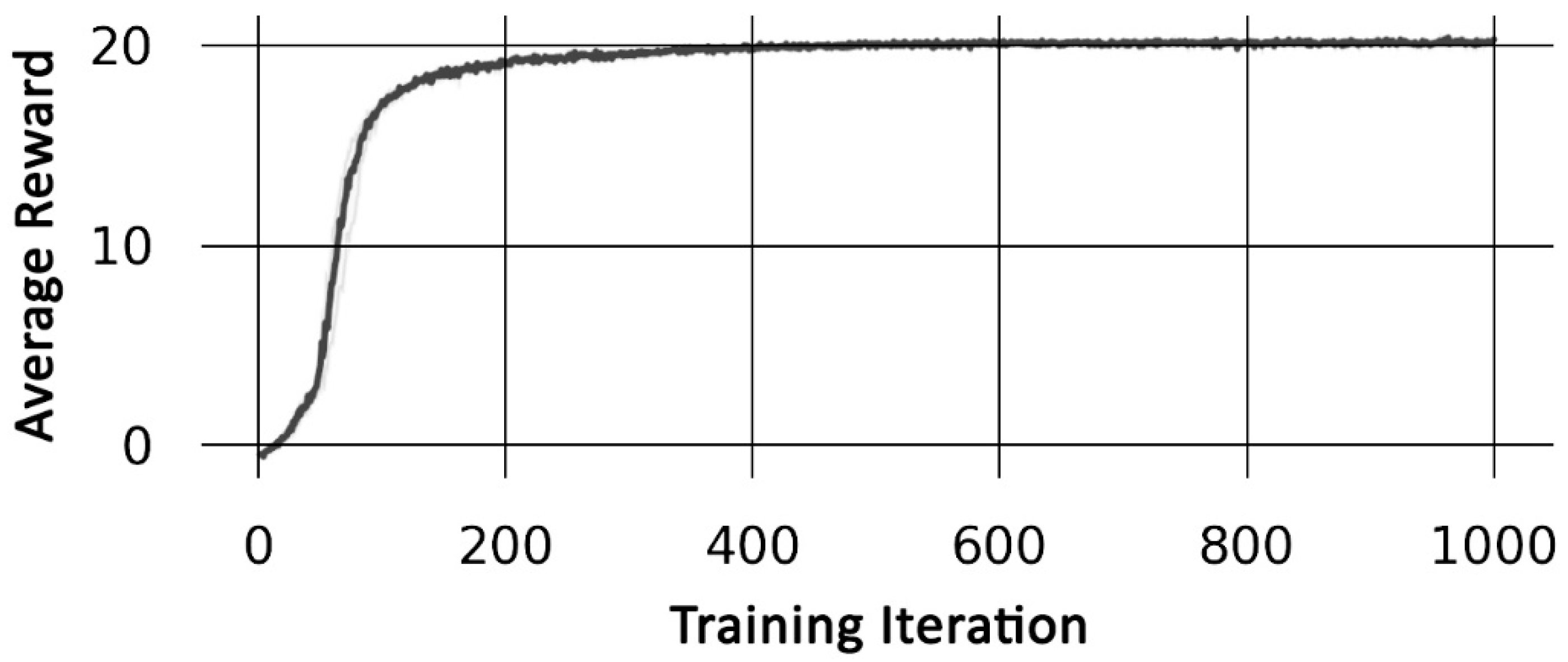
5.2. Data Collection and Training
6. Results and Discussion
6.1. Comparison with Conventional Farming Techniques
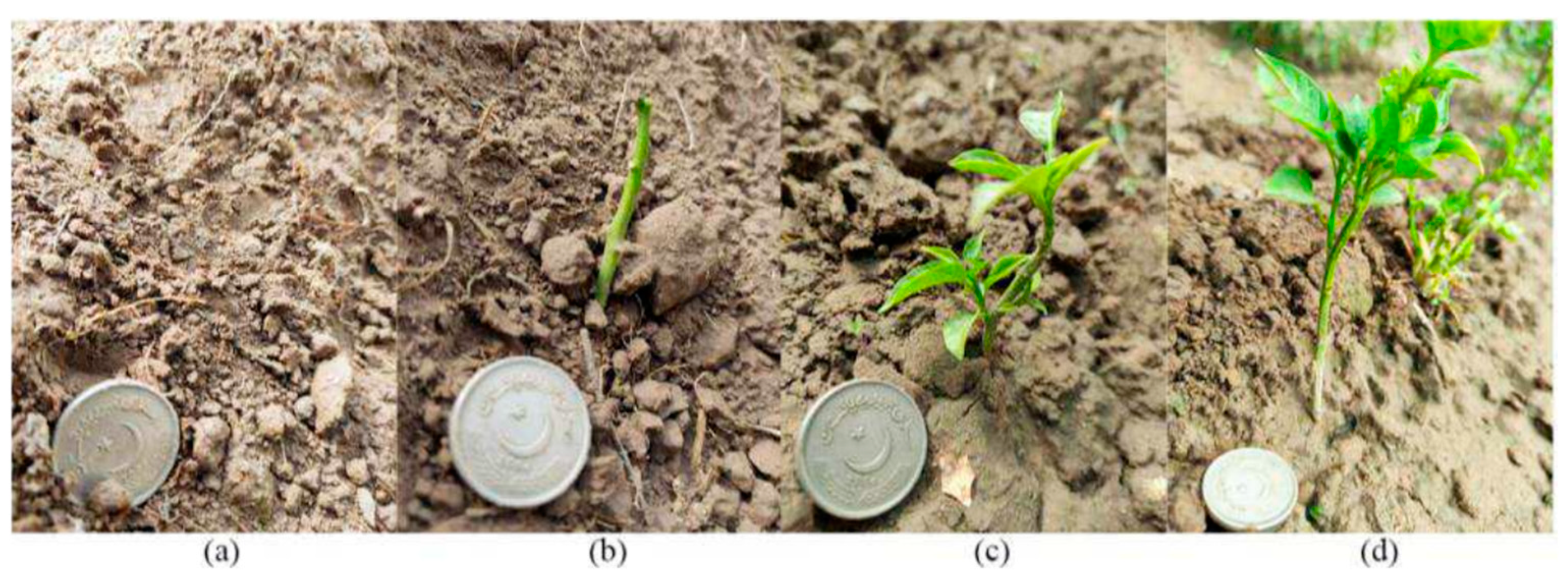
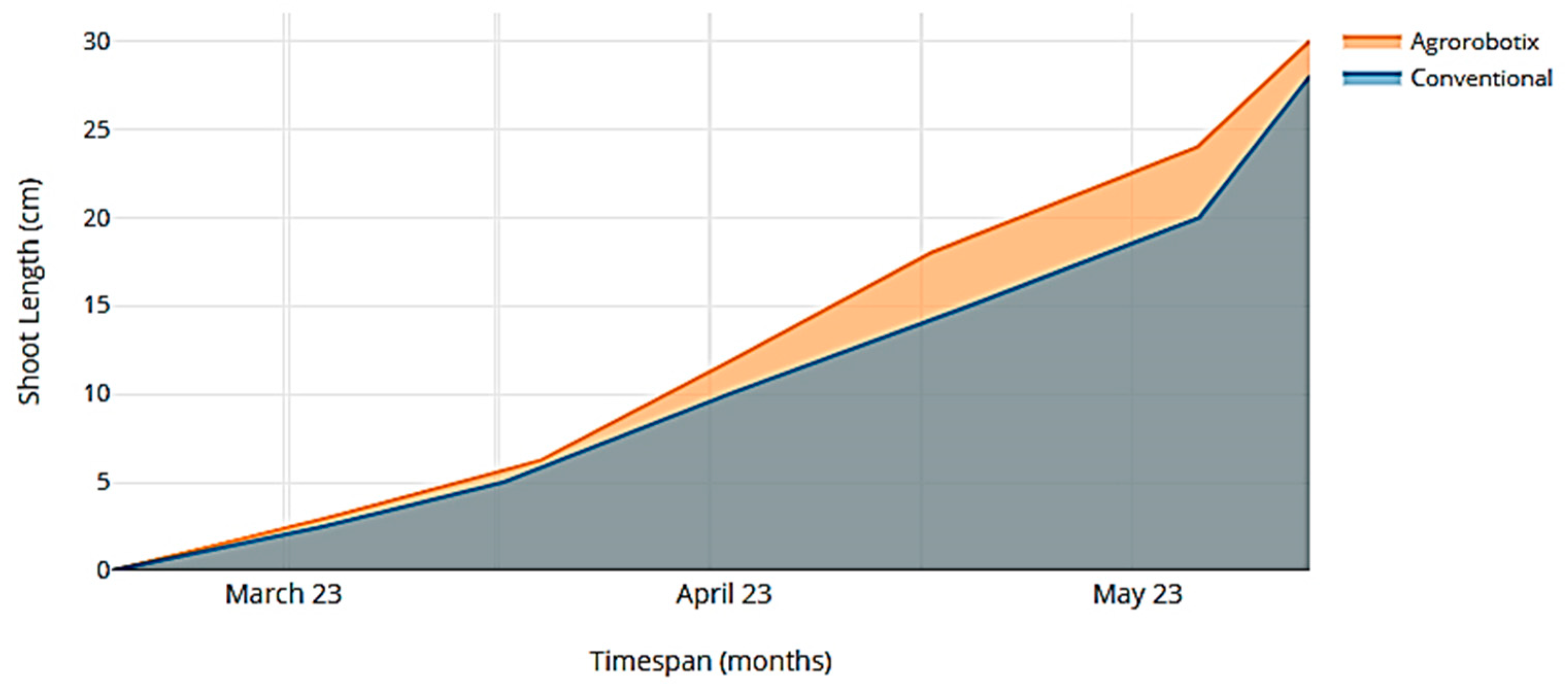
6.1.1. Crop Yield
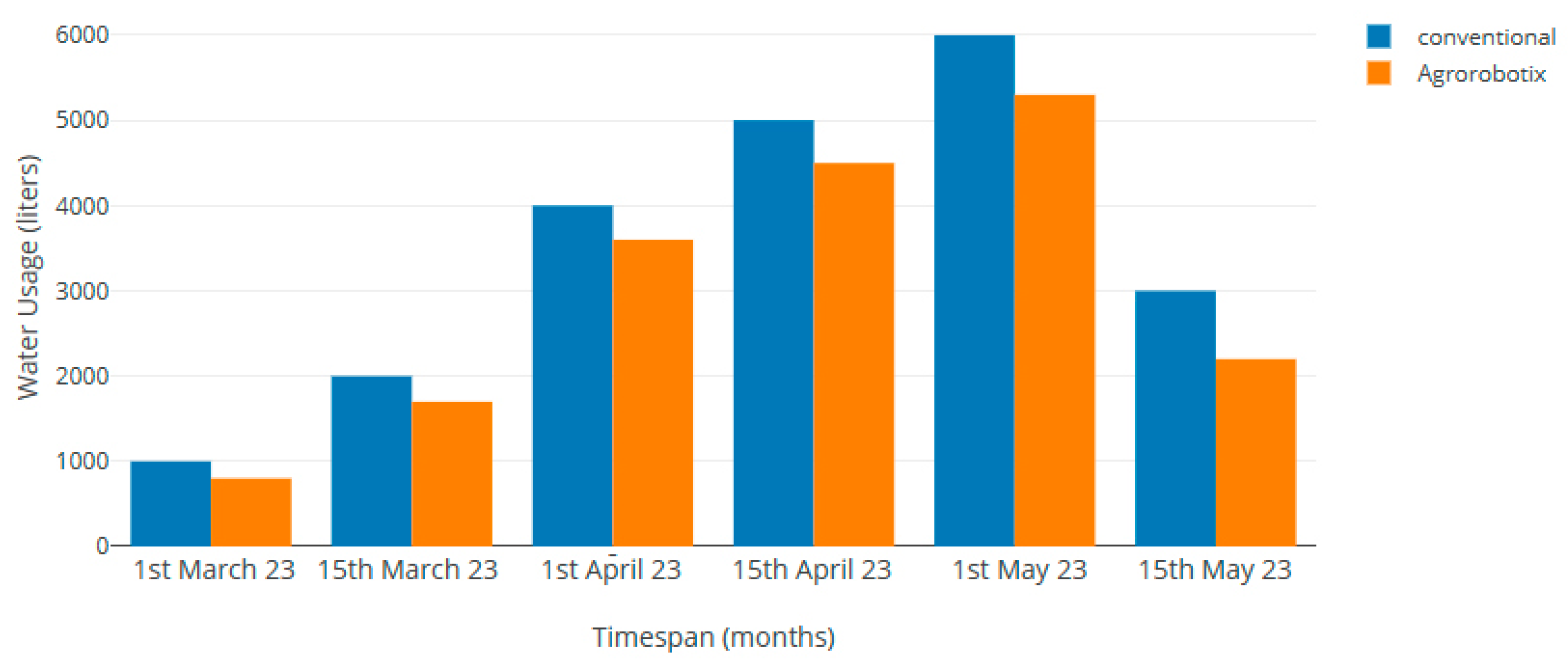
6.1.2. Water Usage
6.2. Insights and Implications
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ahmad, M.N.; Anuar, M.I.; Aziz, N.A.; Bakri, M.A.M.; Hashim, Z.; Abu Seman, I. Addressing functionalities of agricultural robotic (agribots) and automation in the agriculture practices: What’s next? Adv. Agric. Food Res. J. 2022, 4. [Google Scholar] [CrossRef]
- Muntode, D. Multipurpose Agriculture Robot. Int. J. Res. Appl. Sci. Eng. Technol. 2021, 9, 3062–3065. [Google Scholar] [CrossRef]
- Prakash, D.T.S. AGRIBOT: Agriculture Robot. Int. J. Electr. Eng. 2023, 16, 9–16. [Google Scholar] [CrossRef]
- Blackmore, S.; Stout, B.; Wang, M.; Runov, B. Robotic Agriculture—The Future of Agricultural Mechanisation? In Proceedings of the 5th European Conference on Precision Agriculture, Uppsala, Sweden, 9–12 June 2005; pp. 1–8. [Google Scholar]
- Billingsley, J.; Visala, A.; Dunn, M. Robotics in Agriculture and Forestry. In Springer Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer: Berlin, Germany, 2008; pp. 1–25. [Google Scholar] [CrossRef]
- Van Henten, E.J.; Hemming, J.; Van Tuijl, B.A.J.; Kornet, J.G.; Meuleman, J.; Bontsema, J.; Van Os, E.A. An Autonomous Robot for Harvesting Cucumbers in Greenhouses. Auton. Robot. 2002, 13, 241–258. [Google Scholar] [CrossRef]
- Kamilaris, A.; Prenafeta-Boldú, F.X. Deep learning in agriculture: A survey. Comput. Electron. Agric. 2018, 147, 70–90. [Google Scholar] [CrossRef]
- Torres-Sanchez, R.; Navarro-Hellin, H.; Guillamon-Frutos, A.; San-Segundo, R.; Ruiz-Abellón, M.C.; Domingo-Miguel, R. A Decision Support System for Irrigation Management: Analysis and Implementation of Different Learning Techniques. Water 2020, 12, 548. [Google Scholar] [CrossRef]
- Ma, X.; Gong, Q.; Wang, Q.; Xu, D.; Zhou, Y.; Chen, G.; Cao, X.; Wang, L. Design of an Air Suction Wheel-Hole Single Seed Drill for a Wheat Plot Dibbler. Agriculture 2022, 12, 1735. [Google Scholar] [CrossRef]
- Bakker, T.; van Asselt, K.; Bontsema, J.; Müller, J.; van Straten, G. Systematic Design of an Autonomous Platform for Robotic Weeding. J. Terramech. 2010, 47, 63–73. [Google Scholar] [CrossRef]
- Albahar, M. A Survey on Deep Learning and Its Impact on Agriculture: Challenges and Opportunities. Agriculture 2023, 13, 540. [Google Scholar] [CrossRef]
- Naseer, F.; Khan, M.N.; Altalbe, A. Telepresence Robot with DRL Assisted Delay Compensation in IoT-Enabled Sustainable Healthcare Environment. Sustainability 2023, 15, 3585. [Google Scholar] [CrossRef]
- Naseer, F.; Khan, M.N.; Altalbe, A. Intelligent Time Delay Control of Telepresence Robots Using Novel Deep Reinforcement Learning Algorithm to Interact with Patients. Appl. Sci. 2023, 13, 2462. [Google Scholar] [CrossRef]
- Naseer, F.; Khan, M.N.; Nawaz, Z.; Awais, Q. Telepresence Robots and Controlling Techniques in Healthcare System. Comput. Mater. Contin. 2023, 74, 6623–6639. [Google Scholar] [CrossRef]
- Naseer, F.; Khan, M.N.; Rasool, A.; Ayub, N. A Novel Approach to Compensate Delay in Communication by Predicting Teleoperator Behaviour Using Deep Learning and Reinforcement Learning to Control Telepresence Robot. Electron. Lett. 2023, 59, e12806. [Google Scholar] [CrossRef]
- Thangaraj, R.; Anandamurugan, S.; Pandiyan, P.; Kaliappan, V.K. Artificial Intelligence in Tomato Leaf Disease Detection: A Comprehensive Review and Discussion. J. Plant Dis. Prot. 2021, 129, 469–488. [Google Scholar] [CrossRef]
- Patel, D.; Gandhi, M.; Shankaranarayanan, H.; Darji, A.D. Design of an Autonomous Agriculture Robot for Real-Time Weed Detection Using CNN. arXiv 2022, arXiv:2211.12077. [Google Scholar]
- Rose, D.C.; Lyon, J.; de Boon, A.; Hanheide, M.; Pearson, S. Responsible Development of Autonomous Robotics in Agriculture. Nat. Food 2021, 2, 306–309. [Google Scholar] [CrossRef]
- Reina, G.; Milella, A. Towards Autonomous Agriculture: Automatic Ground Detection Using Trinocular Stereovision. Sensors 2012, 12, 12405–12423. [Google Scholar] [CrossRef]
- Padarian, J.; Minasny, B.; McBratney, A.B. Machine Learning and Soil Sciences: A Review Aided by Machine Learning Tools. SOIL 2020, 6, 35–52. [Google Scholar] [CrossRef]
- Ishii, K.; Hayashi, E.; Bin Misron, N.; Thornton, B. Special Issue on Advanced Robotics in Agriculture, Forestry and Fisheries. J. Robot. Mechatron. 2018, 30, 163–164. [Google Scholar] [CrossRef]
- Geiser, S.; Chumkamon, S.; Tominaga, A.; Tomokawa, T.; Jie, T.C.; Hayashi, E. Practical Implementation of FastSLAM for Forestry Robot. In Proceedings of the International Conference on Artificial Life and Robotics, Sapporo, Japan, 24–28 July 2023; Volume 28, pp. 318–322. [Google Scholar]
- Anjum, M.N.; Cheema, M.J.M.; Hussain, F.; Wu, R.-S. Precision irrigation. In Precision Agriculture; Elsevier: Amsterdam, The Netherlands, 2023; pp. 85–101. [Google Scholar]
- Woo, S.; Uyeh, D.D.; Kim, J.; Kim, Y.; Kang, S.; Kim, K.C.; Lee, S.Y.; Ha, Y.; Lee, W.S. Analyses of Work Efficiency of a Strawberry-Harvesting Robot in an Automated Greenhouse. Agronomy 2020, 10, 1751. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technique | Application in Agriculture | Advantages | Limitations |
|---|---|---|---|
| Manual Labor | Seed sowing, irrigation | Low initial cost | Labor-intensive, inefficient |
| Basic Automation | Tractors for sowing | Increased efficiency | Limited to simple tasks |
| GPS-based Automation | Precision planting, mapping fields | Increased precision, reduced overlaps | High initial cost, GPS signal issues |
| Computer Vision | Weed detection, fruit harvesting | Non-destructive analysis, real-time data | Requires extensive data for training |
| Title of Article | Authors | Year | Technology Used | Advantages | Disadvantages |
|---|---|---|---|---|---|
| Artificial intelligence in tomato leaf disease detection: a comprehensive review and discussion [13] | Rajasekaran Thangaraj, et al. | 2022 | Deep Learning, Hyperspectral Imaging | Early and accurate detection of diseases in tomato plants | Limited to tomato plants |
| Design of an Autonomous Agriculture Robot for Real Time Weed Detection using CNN [14] | Dhruv Patel, et al. | 2022 | Autonomous Robots, GPS, Sensors | Precision application of agrochemicals, reducing waste and environmental impact | Doesn’t address DRL or complex decision-making |
| Responsible development of autonomous robotics in agriculture [15] | David Christian Rose, et al. | 2021 | Autonomous Robots, Precision Agriculture | Increases efficiency and reduces costs in agricultural operations | Does not incorporate Deep Reinforcement Learning |
| Towards Autonomous Agriculture: Automatic Ground Detection Using Trinocular Stereovision [16] | Giulio Reina, et al. | 2020 | Autonomous Robots, Automatic Seed Sowing | Automates seed sowing, reducing labor costs | Does not incorporate Deep Reinforcement Learning |
| Machine learning and soil sciences: a review aided by machine learning tools [17] | José Padarian, et al. | 2020 | Machine Learning, Soil Sensing | Accurate prediction of soil phosphorus levels for better fertilizer management | Focused on phosphorus prediction, not on seed sowing or irrigation |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Addas, A.; Tahir, M.; Ismat, N. Enhancing Precision of Crop Farming towards Smart Cities: An Application of Artificial Intelligence. Sustainability 2024, 16, 355. https://doi.org/10.3390/su16010355
Addas A, Tahir M, Ismat N. Enhancing Precision of Crop Farming towards Smart Cities: An Application of Artificial Intelligence. Sustainability. 2024; 16(1):355. https://doi.org/10.3390/su16010355
Chicago/Turabian StyleAddas, Abdullah, Muhammad Tahir, and Najma Ismat. 2024. "Enhancing Precision of Crop Farming towards Smart Cities: An Application of Artificial Intelligence" Sustainability 16, no. 1: 355. https://doi.org/10.3390/su16010355
APA StyleAddas, A., Tahir, M., & Ismat, N. (2024). Enhancing Precision of Crop Farming towards Smart Cities: An Application of Artificial Intelligence. Sustainability, 16(1), 355. https://doi.org/10.3390/su16010355