


Route Planning under Mobility Restrictions in the Palestinian Territories



Abstract
:1. Introduction
2. Materials and Methods
2.1. Data Sources and Collection
2.2. Data Processing and Analysis
2.2.1. Identifying the Risk Score
- Creating risk indicators
- Index weight calculation
- Normalise indexes for the homogenisation of heterogeneous indexes:Positive index, where higher values indicate more risk on the road.Negative index, where lower values indicate more risk on the road.
- Calculate the proportion of the ith sample value under the jth index:
- Calculate the entropy of the jth index:where K = 1/ln(n) > 0, meeting ej ≥ 0. The range of entropy value ei is [0, 1]. The larger the ei is, the greater the dispersion degree of index j and the greater the amount of information that can be derived. Hence, a higher weight should be given to the index.
- Calculate information entropy redundancy (difference) for each j index, where ej is the entropy of the jth index. This step aims to quantify the amount of redundancy information captured by each index. A higher value of dj indicates less redundancy and more unique information within that particular index.
- Calculate the weight of each index:
2.2.2. Travel Time
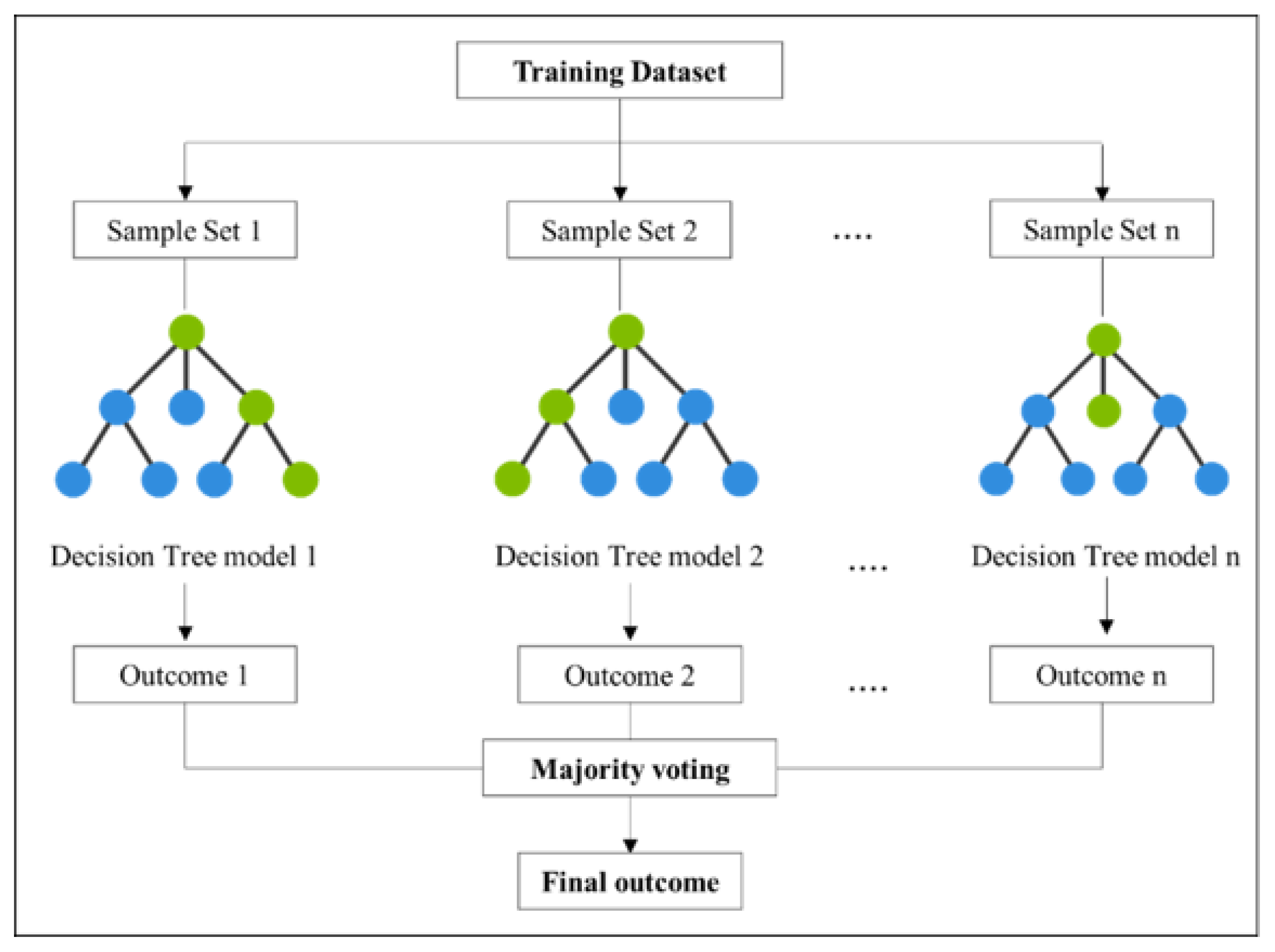
- Predicting waiting time at mobility restrictions using Random Forest Regression
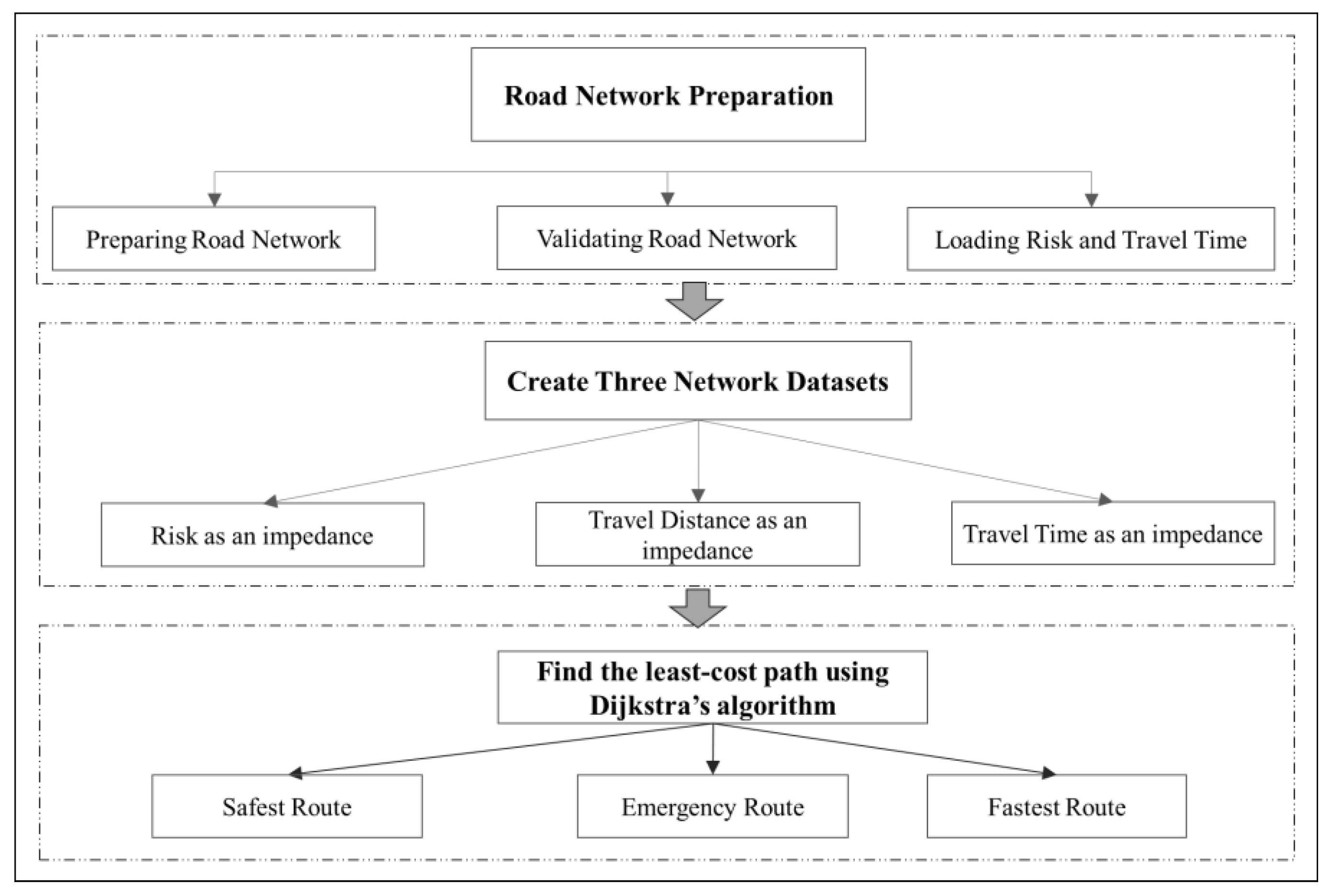
2.2.3. Construction of Route Planning Model
- Road network preparation
- Road network validation
- Loading cost factors: risk, travel time, and distance
- Building the graph model and applying route analysis using Dijkstra’s algorithm
3. Results and Discussion
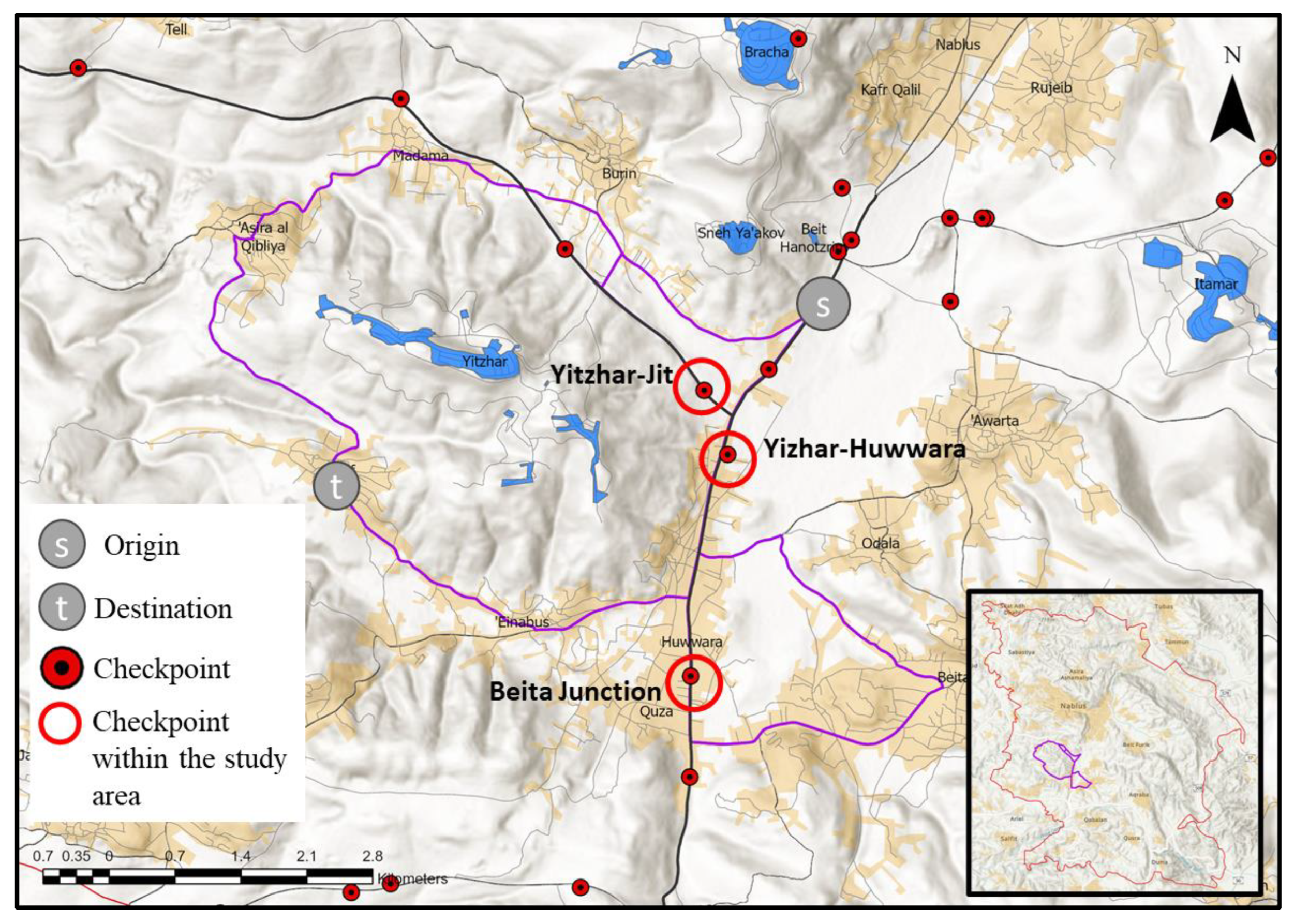
3.1. The Study Area
3.2. Data Sources and Collection
3.3. Data Processing and Analysis
3.3.1. Identifying the Comprehensive Risk Score
- Creating Risk Indicators
- Index weight calculation
- Determination of a comprehensive risk score (Ri)
3.3.2. Travel Time
3.3.3. Construction of the Route Planning Model
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Habbas, W.; Berda, Y. Colonial Management as a Social Field: The Palestinian Remaking of Israel’s System of Spatial Control. Curr. Sociol. 2021, 71, 848–865. [Google Scholar] [CrossRef]
- Griffiths, M.; Repo, J. Women and Checkpoints in Palestine. Secur. Dialogue 2021, 52, 249–265. [Google Scholar] [CrossRef]
- Abrahams, A.S. Hard Traveling: Unemployment and Road Infrastructure in the Shadow of Political Conflict. Political Sci. Res. Methods 2021, 10, 545–566. [Google Scholar] [CrossRef]
- Aburas, H.; Shahrour, I. Impact of the Mobility Restrictions in the Palestinian Territory on the Population and the Environment. Sustainability 2021, 13, 13457. [Google Scholar] [CrossRef]
- OCHA Data on Casualties. Available online: https://www.ochaopt.org/data/casualties (accessed on 13 February 2023).
- B’Tselem Settler Violence in the WB. Available online: https://www.btselem.org/settler_violence_updates_list?f%5B2%5D=nf_district%3A181&f%5B3%5D=nf_type%3A173&f%5B4%5D=date%3A%28min%3A1640995200%2Cmax%3A1672444800%29&page=1 (accessed on 22 January 2023).
- UNHRC UN Experts Alarmed by Rise in Settler Violence in Occupied Palestinian Territory. Available online: https://www.ohchr.org/en/press-releases/2021/11/un-experts-alarmed-rise-settler-violence-occupied-palestinian-territory (accessed on 14 March 2023).
- Sarraf, R.; McGuire, M.P. Integration and Comparison of Multi-Criteria Decision Making Methods in Safe Route Planner. Expert Syst. Appl. 2020, 154, 113399. [Google Scholar] [CrossRef]
- Liao, X.; Zhou, T.; Wang, X.; Dai, R.; Chen, X.; Zhu, X. Driver Route Planning Method Based on Accident Risk Cost Prediction. J. Adv. Transp. 2022, 2022, 5023052. [Google Scholar] [CrossRef]
- Lozano Domínguez, J.M.; Mateo Sanguino, T.d.J. Walking Secure: Safe Routing Planning Algorithm and Pedestrian’s Crossing Intention Detector Based on Fuzzy Logic App. Sensors 2021, 21, 529. [Google Scholar] [CrossRef]
- Noureddine, M.; Ristic, M. Route Planning for Hazardous Materials Transportation: Multi-Criteria Decision-Making Approach. Decis. Mak. Appl. Manag. Eng. 2019, 2, 66–85. [Google Scholar] [CrossRef]
- Zandieh, F.; Ghannadpour, S.F. A Comprehensive Risk Assessment View on Interval Type-2 Fuzzy Controller for a Time-Dependent HazMat Routing Problem. Eur. J. Oper. Res. 2023, 305, 685–707. [Google Scholar] [CrossRef]
- Subotić, M.; Stepanović, N.; Tubić, V.; Softić, E.; Bouraima, M.B. Models of Analysis of Credible Deviation from Speed Limits on Two-Lane Roads of Bosnia and Herzegovina. Complexity 2022, 2022, 2832175. [Google Scholar] [CrossRef]
- Wachtel, G.; Schmöcker, J.D.; Hadas, Y.; Gao, Y.; Nahum, O.E.; Ben-Moshe, B. Planning for Tourist Urban Evacuation Routes: A Framework for Improving the Data Collection and Evacuation Processes. Environ. Plan B Urban Anal. City Sci. 2021, 48, 1108–1125. [Google Scholar] [CrossRef]
- Ikeda, Y.; Inoue, M. An Evacuation Route Planning for Safety Route Guidance System after Natural Disaster Using Multi-Objective Genetic Algorithm. Procedia Comput. Sci. 2016, 96, 1323–1331. [Google Scholar] [CrossRef]
- Ceccato, V.; Gaudelet, N.; Graf, G. Crime and Safety in Transit Environments: A Systematic Review of the English and the French Literature, 1970–2020; Springer: Berlin/Heidelberg, Germany, 2022; Volume 14, ISBN 0123456789. [Google Scholar]
- Aytac, M. Work-Related Violence and Stress: The Case of Taxi Drivers in Turkey. Financ. Manag. Sci. 2017, 3, 1–9. [Google Scholar]
- Mayhew, C.; Graycar, A. Violent Assaults on Taxi Drivers: Incidence Patterns and Risk Factors. Trends Issues Crime Crim. Justice Ser. 2000, 178, 1–6. [Google Scholar]
- Statista Number of Crime Events in the Public Transportation Systems in the United States in 2019. Available online: https://www.statista.com/statistics/1295845/number-crime-events-public-transit-us-by-type/ (accessed on 2 February 2023).
- Alpkoçak, A.; Cetin, A. Safe Map Routing Using Heuristic Algorithm Based on Regional Crime Rates. Lect. Notes Data Eng. Commun. Technol. 2020, 43, 335–346. [Google Scholar] [CrossRef]
- Peng, N.; Xi, Y.; Rao, J.; Ma, X.; Ren, F. Urban Multiple Route Planning Model Using Dynamic Programming in Reinforcement Learning. IEEE Trans. Intell. Transp. Syst. 2022, 23, 8037–8047. [Google Scholar] [CrossRef]
- Aburas, H. SRMS Paltform. Available online: https://experience.arcgis.com/experience/6f33d774efb74ed497bb79daac78a1de/page/Page/?fbclid=IwAR2sjH2MO0jRDQQOyY-p0zv7LQ-HZThQ1_9yOXrS18cej-tRzfTSwz75hW8 (accessed on 6 October 2023).
- Agrawal, S.; Gupta, R.D. Web GIS and Its Architecture: A Review. Arab. J. Geosci. 2017. [Google Scholar] [CrossRef]
- Esri Shapefile. Available online: https://doc.arcgis.com/en/arcgis-online/reference/shapefiles.htm#:~:text=AshapefileisanEsri,andcontainsonefeatureclass. (accessed on 7 April 2023).
- Borker, G. Safety First: Perceived Risk of Street Harassment and Educational Choices of Women; Working Paper; World Bank: Washington, DC, USA, 2021. [Google Scholar]
- Richardson, S.; Windau, J. Fatal and Nonfatal Assaults in the Workplace, 1996 to 2000. Clin. Occup. Environ. Med. 2003, 3, 673–689. [Google Scholar] [CrossRef]
- Balcells, L.; Stanton, J.A. Violence against Civilians during Armed Conflict: Moving beyond the Macro- and Micro-Level Divide. Annu. Rev. Political Sci. 2021, 24, 45–69. [Google Scholar] [CrossRef]
- Couto, M.; Lawoko, S.; Svanström, L. Violence Against Drivers and Conductors in the Road Passenger Transport Sector in Maputo, Mozambique. Afr. Saf. Promot. A J. Inj. Violence Prev. 2011, 7, 17–36. [Google Scholar] [CrossRef]
- Essenberg, B. SECTORAL ACTIVITIES PROGRAMME Working Paper Violence and Stress at Work in the Transport Sector. 2003. Available online: https://ideas.repec.org/p/ilo/ilowps/993631343402676.html (accessed on 22 April 2023).
- Dunckel Graglia, A. Finding Mobility: Women Negotiating Fear and Violence in Mexico City’s Public Transit System. Gend. Place Cult. 2016, 23, 624–640. [Google Scholar] [CrossRef]
- Ding, X.; Chong, X.; Bao, Z.; Xue, Y.; Zhang, S. Fuzzy Comprehensive Assessment Method Based on the Entropy Weight Method and Its Application in the Water Environmental Safety Evaluation of the Heshangshan Drinking Water Source Area, Three Gorges Reservoir Area, China. Water 2017, 9, 329. [Google Scholar] [CrossRef]
- Zhu, Y.; Tian, D.; Yan, F. Effectiveness of Entropy Weight Method in Decision-Making. Math. Probl. Eng. 2020, 2020, 3564835. [Google Scholar] [CrossRef]
- Stević, Ž.; Subotić, M.; Softić, E.; Božić, B. Multi-Criteria Decision-Making Model for Evaluating Safety of Road Sections. J. Intell. Manag. Decis. 2022, 1, 78–87. [Google Scholar] [CrossRef]
- Yannis, G.; Kopsacheili, A.; Dragomanovits, A.; Petraki, V. State-of-the-Art Review on Multi-Criteria Decision-Making in the Transport Sector. J. Traffic Transp. Eng. (Engl. Ed.) 2020, 7, 413–431. [Google Scholar] [CrossRef]
- Farooq, D.; Moslem, S.; Jamal, A.; Butt, F.M.; Almarhabi, Y.; Tufail, R.F.; Almoshaogeh, M. Assessment of Significant Factors Affecting Frequent Lane-Changing Related to Road Safety: An Integrated Approach of the Ahp–Bwm Model. Int. J. Environ. Res. Public Health 2021, 18, 628. [Google Scholar] [CrossRef]
- Xiao, M.; Luo, R.; Yu, X.; Chen, Y. Comprehensive Ranking of Road Safety Condition by Using the Functional and Material Performance Index. Constr. Build. Mater 2022, 324, 126644. [Google Scholar] [CrossRef]
- Sun, J.; Liu, S.; Wang, L.; He, Z. Safety Resilience Evaluation of Urban Public Bus Based on Comprehensive Weighting Method and Fuzzy Comprehensive Evaluation Method. In Proceedings of the 2020 International Conference on Urban Engineering and Management Science, Zhuhai, China, 24–26 April 2020; pp. 370–379. [Google Scholar] [CrossRef]
- Wu, R.M.X.; Zhang, Z.; Yan, W.; Fan, J.; Gou, J.; Liu, B.; Gide, E.; Soar, J.; Shen, B.; Fazal-E-Hasan, S.; et al. A Comparative Analysis of the Principal Component Analysis and Entropy Weight Methods to Establish the Indexing Measurement. PLoS ONE 2022, 17, e0262261. [Google Scholar] [CrossRef]
- Cai, X.; Lei, C.; Peng, B.; Tang, X.; Gao, Z. Road Traffic Safety Risk Estimation Method Based on Vehicle Onboard Diagnostic Data. J. Adv. Transp. 2020, 2020, 3024101. [Google Scholar] [CrossRef]
- Du, W.; Ding, S. A Survey on Multi-Agent Deep Reinforcement Learning: From the Perspective of Challenges and Applications. Artif. Intell. Rev. 2021, 54, 3215–3238. [Google Scholar] [CrossRef]
- Yao, Y.; Peng, Z.; Xiao, B. Parallel Hyper-Heuristic Algorithm for Multi-Objective Route Planning in a Smart City. IEEE Trans. Veh. Technol. 2018, 67, 10307–10318. [Google Scholar] [CrossRef]
- Wang, H.; Tang, X.; Kuo, Y.H.; Kifer, D.; Li, Z. A Simple Baseline for Travel Time Estimation Using Large-Scale Trip Data. ACM Trans. Intell. Syst. Technol. 2019, 10, 1–22. [Google Scholar] [CrossRef]
- Laoide-Kemp, D.; O’Mahony, M. Dealing with Latency Effects in Travel Time Prediction on Motorways. Transp. Eng. 2020, 2, 100009. [Google Scholar] [CrossRef]
- Prokhorchuk, A.; Dauwels, J.; Jaillet, P. Estimating Travel Time Distributions by Bayesian Network Inference. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1867–1876. [Google Scholar] [CrossRef]
- Serin, F.; Alisan, Y.; Kece, A. Hybrid Time Series Forecasting Methods for Travel Time Prediction. Phys. A Stat. Mech. Its Appl. 2021, 579, 126134. [Google Scholar] [CrossRef]
- Mokhtarimousavi, S.; Anderson, J.C.; Azizinamini, A.; Hadi, M. Factors Affecting Injury Severity in Vehicle-Pedestrian Crashes: A Day-of-Week Analysis Using Random Parameter Ordered Response Models and Artificial Neural Networks. Int. J. Transp. Sci. Technol. 2020, 9, 100–115. [Google Scholar] [CrossRef]
- Zhao, J.; Gao, Y.; Tang, J.; Zhu, L.; Ma, J. Highway Travel Time Prediction Using Sparse Tensor Completion Tactics and K -Nearest Neighbor Pattern Matching Method. J. Adv. Transp. 2018, 2018, 5721058. [Google Scholar] [CrossRef]
- Bachu, A.K.; Reddy, K.K.; Vanajakshi, L. Bus Travel Time Prediction Using Support Vector Machines for High Variance Conditions. Transport 2021, 36, 221–234. [Google Scholar] [CrossRef]
- Taghipour, H.; Parsa, A.B.; Mohammadian, A. A Dynamic Approach to Predict Travel Time in Real Time Using Data Driven Techniques and Comprehensive Data Sources. Transp. Eng. 2020, 2, 100025. [Google Scholar] [CrossRef]
- Kyritsis, A.I.; Deriaz, M. A Machine Learning Approach to Waiting Time Prediction in Queueing Scenarios. In Proceedings of the 2019 Second International Conference on Artificial Intelligence for Industries (AI4I), Laguna Hills, CA, USA, 25–27 September 2019; pp. 17–21. [Google Scholar] [CrossRef]
- Curtis, C.; Liu, C.; Bollerman, T.J.; Pianykh, O.S. Machine Learning for Predicting Patient Wait Times and Appointment Delays. J. Am. Coll. Radiol. 2017, 15, 1310–1316. [Google Scholar] [CrossRef]
- Sanit-in, Y.; Saikaew, K.R. Prediction of Waiting Time in One-Stop Service. Int. J. Mach. Learn. Comput. 2019, 9, 322–327. [Google Scholar] [CrossRef]
- Anand, A.; Patel, R.; Rajeswari, D. A Comprehensive Synchronization by Deriving Fluent Pipeline and Web Scraping through Social Media for Emergency Services. In Proceedings of the 2022 International Conference on Advances in Computing, Communication and Applied Informatics (ACCAI), Chennai, India, 28–29 January 2022. [Google Scholar] [CrossRef]
- Sipper, M.; Moore, J.H. Conservation Machine Learning: A Case Study of Random Forests. Sci. Rep. 2021, 11, 3629. [Google Scholar] [CrossRef]
- Lin, Y.; Li, R. Real-Time Traffic Accidents Post-Impact Prediction: Based on Crowdsourcing Data. Accid. Anal. Prev. 2020, 145, 105696. [Google Scholar] [CrossRef]
- Sharma, S.; Kang, D.H.; Montes de Oca, J.R.; Mudgal, A. Machine Learning Methods for Commercial Vehicle Wait Time Prediction at a Border Crossing. Res. Transp. Econ. 2021, 89, 101034. [Google Scholar] [CrossRef]
- Ahmed, S.; Ibrahim, R.F.; Hefny, H.A. GIS-Based Network Analysis for the Roads Network of the Greater Cairo Area. In Proceedings of the International Conference on Applied Research in Computer Science and Engineering ICAR’17, Beirut, Lebanon, 22–23 June 2017; Volume 2144, pp. 1–9. [Google Scholar]
- Esri Network Topology. Available online: https://pro.arcgis.com/en/pro-app/latest/help/data/utility-network/about-network-topology.htm (accessed on 22 March 2023).
- Esri GIS Dictionalry. Available online: https://support.esri.com/en-us/gis-dictionary/impedance (accessed on 28 January 2023).
- Dijkstra, E.W. A Note on Two Problems in Connexion with Graphs. Numer. Mathmatik 1959, 1, 269–271. [Google Scholar] [CrossRef]
- Hart, P.E.; Nils, J.; Nilsson, B.R. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Stentz, A. Optimal and Efficient Path Planning for Unknown and Dynamic Environments. Int. J. Robot. Autom. 1995, 10, 89–100. [Google Scholar]
- Koenig, S.; Likhachev, M. ID* Lite: Improved D* Lite algorithm. AAAI-02 Proc. 2002, 15, 476–483. [Google Scholar] [CrossRef]
- Dorigo, M.; Gianni, D.C. Ant Colony Optimization: A New Meta-Heuristic. In Proceedings of the 1999 Congress on Evolutionary Computation-CEC99 (Cat. No. 99TH8406), Washington, DC, USA, 6–9 July 1999; pp. 1470–1477. [Google Scholar]
- Karadimas, N.V.; Kolokathi, M.; Defteraiou, G.; Loumos, V. Ant Colony System vs ArcGIS Network Analyst: The Case of Municipal Solid Waste Collection. In Proceedings of the 5th WSEAS International Conference on Environment, Ecosystems and Development, Tenerife, Spain, 14–16 December 2007; pp. 128–134. [Google Scholar] [CrossRef]
- Mirahadi, F.; McCabe, B.Y. EvacuSafe: A Real-Time Model for Building Evacuation Based on Dijkstra’s Algorithm. J. Build. Eng. 2021, 34, 101687. [Google Scholar] [CrossRef]
- Esri Algorithms Used by Network Analyst. Available online: https://pro.arcgis.com/en/pro-app/latest/help/analysis/networks/algorithms-used-by-network-analyst.htm (accessed on 10 January 2023).
- Rachmawati, D.; Gustin, L. Analysis of Dijkstra’s Algorithm and A∗ Algorithm in Shortest Path Problem. J. Phys. Conf. Ser. 2020, 1566, 012061. [Google Scholar] [CrossRef]
- Al-Sahili, K.; Dwaikat, M. Modeling Geometric Design Consistency and Road Safety for Two-Lane Rural Highways in the West Bank, Palestine. Arab. J. Sci. Eng. 2019, 44, 4895–4909. [Google Scholar] [CrossRef]
- Arij Assessing the Impacts of Israeli Movement Restrictions on the Mobility of People and Goods. 2019. Available online: https://www.arij.org/publications/special-reports/special-reports-2019/assessing-the-impacts-of-israeli-movement-restrictions-on-the-mobility-of-people-and-goods-in-the-west-bank-2019/ (accessed on 7 March 2022).
- Statistics, C.B. of Traffic Volume on Judea and Samaria. Available online: https://www.cbs.gov.il/en/Statistics/Pages/Tools-and-Databases.aspx (accessed on 12 April 2022).
- Aburas, H. Waiting-Time-Prediction-Using-RF-Model. Available online: https://github.com/hala-aburas/waiting-time-prediction-using-RF-model.git (accessed on 19 June 2023).
- Mour, R.; Carvalho, R.; Carvalho, R.; Ramos, G. Predicting Waiting Time Overflow on Bank Teller Queues. In Proceedings of the 2017 16th IEEE International Conference on Machine Learning and Applications (ICMLA), Cancun, Mexico, 18–21 December 2017; pp. 842–847. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B. Scikit-Learn: Machine Learning in Python Fabian. J. Ofmachine Learn. Res. 2011, 12, 2825–2830. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Description | Sources | Source Type | Data Type | Data Format |
|---|---|---|---|---|---|
| road network | road network geometry, attributes, speed limits, and | governmental authorities | authoritative data | spatial data | shapefile |
| physical restrictions | permanent checkpoints, road gates, physical barriers | governmental authorities | authoritative data | spatial data | shapefile |
| real-time restriction types, locations, waiting times at restrictions | SRMS platform NGOs | crowdsourcing data open source | spatial data tabular data | WFS 1 Excel sheet | |
| violent incident restrictions | the incident’s location, time of day, and day of the week | NGOs | open-source data | text data | text |
| the incident’s location and time | SRMS platform | crowdsourcing data | spatial data | WFS |
| No. | Index | Definition | Description |
|---|---|---|---|
| 1 | NO_RIST | no. of permanent mobility restrictions | no. of permanent restrictions = 1, 2, 3, no mobility restriction = 0 |
| 2 | NO_VIO | no. of historical violence actions against vehicles | no. of violent actions against the drivers = 1, 2, 3, no record = 0 |
| 3 | TOD | time of day | daytime = 1, night time = 2 |
| 4 | DOW | day of week | weekday = 1, weekend = 2 |
| 5 | LGT_CON | light condition | available = 1, not available = 0 |
| 6 | ROAD_CON | roadway surface condition | quality of road surface: good = 1, moderate = 2, bad = 3 |
| 7 | ADJ_BUILTUP | type of the adjacent built-up area | rural = 1, urban = 2 |
| Dataset | Description | Sources | Data Format |
|---|---|---|---|
| road network | road network geometry, attributes, and speed limits. | MOT | shapefile |
| mobility restrictions | permanent checkpoints, road gates, prohibited roads. | MOLG | shapefile |
| real-time restriction type and location. | SRMS Platform | WFS | |
| waiting time at restrictions. | Arij | Excel sheet | |
| violence incidents restrictions | incident’s location, time of day, and day of the week. | B’Teselem | text |
| incident’s location and time. | SRMS Platform | WFS |
| No. | Index | Statistical Value (Proportion) |
|---|---|---|
| 1 | NO_RIST | 1 = 37.5%, 0 = 62.5% |
| 2 | NO_VIO | 1 = 18.6%, 3 = 6.3%, 4 = 6.3%, 5 = 6.3%, 0 = 62.5% |
| 3 | TOD | 1 = 50%, 2 = 50% |
| 4 | DOW | 1 = 66.7%, 2 = 33.3% |
| 5 | LGT_CON | 1 = 56.2%, 0 = 43.8% |
| 6 | ROAD_CON | 1 = 3%, 2 = 56.2%, 3 = 18.8% |
| 7 | ADJ_BUILTUP | 1 = 31.2%, 2 = 68.8% |
| No. | Index | ej | Wj |
|---|---|---|---|
| 1 | NO_RIST | 0.646 | 0.148 |
| 2 | NO_VIO | 0.570 | 0.180 |
| 3 | TOD | 0.625 | 0.157 |
| 4 | DOW | 0.625 | 0.158 |
| 5 | LGT_CON | 0.701 | 0.125 |
| 6 | ROAD_CON | 0.876 | 0.051 |
| 7 | ADJ_BUILTUP | 0.580 | 0.176 |
| Road Edge | NO_RIST | NO_VIO | TOD | DOW | LGT_CON | ROAD_CON | ADJ_BUILTUP | Ri |
|---|---|---|---|---|---|---|---|---|
| a1 | 0.00001 | 0.00001 | 0.00001 | 0.00001 | 0.00001 | 1 | 1 | 0.229 |
| a2 | 1 | 1 | 1 | 2 | 1 | 1 | 1 | 1.158 |
| a3 | 1 | 3 | 2 | 1 | 1 | 1 | 2 | 1.696 |
| a4 | 1 | 0.00001 | 0.00001 | 0.00001 | 1 | 3 | 1 | 0.607 |
| . . . | . . . | . . . | . . . | . . . | . . . | . . . | . . . | . . . |
| a14 | 0.00001 | 0.00001 | 0.00001 | 0.00001 | 1 | 2 | 2 | 0.583 |
| a15 | 0.00001 | 0.00001 | 0.00001 | 0.00001 | 1 | 2 | 1 | 0.406 |
| a16 | 1 | 5 | 1 | 1 | 1 | 2 | 1 | 1.776 |
| Time | Speed | Time_Queue | |
|---|---|---|---|
| mean | 1.8 | 51.8 | 0.1 |
| std | 1.0 | 14.4 | 0.5 |
| min | 0.3 | 0.0 | 0.0 |
| 50% | 1.6 | 53.0 | 0.0 |
| max | 15.3 | 101.0 | 8.2 |
| Correlation Coefficient | Time in the Queue | Vehicle Speed | DOW |
| Waiting Time at checkpoint | 0.85 | −0.74 | −0.13 |
| Time Cost (min) | Risk Cost | Length Cost (m) | |
| Emergency | 10.6 | 3.58 | 6689 |
| Safest | 13.5 | 1.74 | 9412 |
| Fastest | 13.1 | 3.95 | 9782 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aburas, H.; Shahrour, I.; Giglio, C. Route Planning under Mobility Restrictions in the Palestinian Territories. Sustainability 2024, 16, 660. https://doi.org/10.3390/su16020660
Aburas H, Shahrour I, Giglio C. Route Planning under Mobility Restrictions in the Palestinian Territories. Sustainability. 2024; 16(2):660. https://doi.org/10.3390/su16020660
Chicago/Turabian StyleAburas, Hala, Isam Shahrour, and Carlo Giglio. 2024. "Route Planning under Mobility Restrictions in the Palestinian Territories" Sustainability 16, no. 2: 660. https://doi.org/10.3390/su16020660
APA StyleAburas, H., Shahrour, I., & Giglio, C. (2024). Route Planning under Mobility Restrictions in the Palestinian Territories. Sustainability, 16(2), 660. https://doi.org/10.3390/su16020660