
Towards Sustainable Smart Homes by a Hierarchical Hybrid Architecture of an Intelligent Agent



Abstract
:1. Introduction
2. Related Works
2.1. Smart Home Service
- Transparency: In the real world, environmental changes in smart homes cannot be fully anticipated during design time. When a change occurs, the user’s requirement may not be fulfilled as smoothly as in the normal condition.
- Reliability: A user wants to receive reliable services. Achieving expected levels of reliability is a great challenge, especially when coupled with the ad hoc accretion of devices that may be expected in smart homes.
- Interoperability: Operating a smart home requires the successful operation of many tasks, such as monitoring the status of devices, automating decision support and invoking services.
- Security: A smart home allows us to control all of the appliances, lighting systems, door locks and climate controls remotely, which also introduces genuine concerns over how secure these automated living spaces actually are.
2.2. Intelligent Agent
2.3. Hierarchical Human Intention
3. Smart Home Agent System
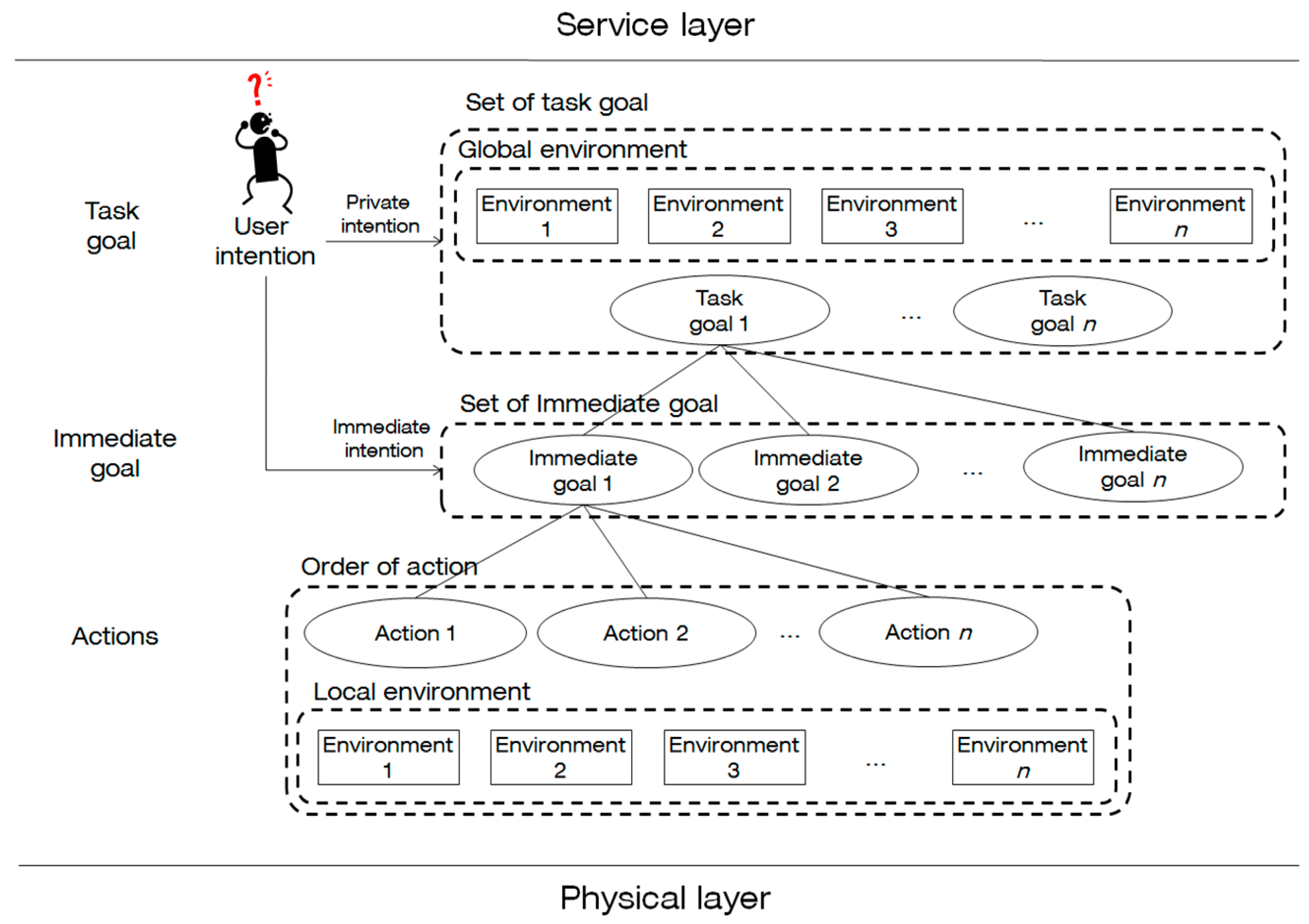
3.1. Hierarchical Goal Model
- Definition 1. Global environment expresses the state of devices for making the sequence of immediate goals.
- Definition 2. Task goal is when the user wants this goal by private intention. It decides what kind of global environment is needed and what kind of immediate goal is pushed to the sequence queue that saves the sequence of the immediate goal in the current global environment to achieve the task goal.
- Definition 3. Local environment represents the information that changes frequently when the action in the immediate goal is performed. The global environments decide whether to execute the immediate goal or not; on the other hand, the local environments decide the actions that achieve the immediate goal.
- Definition 4. Immediate goal is when the user wants this goal for the immediate intention.
3.2. Hierarchical Agent Architecture
- Definition 5. Task goal module consists of the global environments and the effects as follows:where is the state of global environment and represents whether the effect is executable or not. It has a binary value and can be collected by the sensors or the feedback massage of the device. In the system, it decides the states of precondition. is one of the effects in . It can decide what kind of global environment is collected and what immediate goals are pushed into the sequence queue as follows.where the precondition is one or more of the global environments.The immediate task modules are inspired by the spreading activation algorithm [31]. Each module is represented by the response value of which module affects the rates of change of other activations.
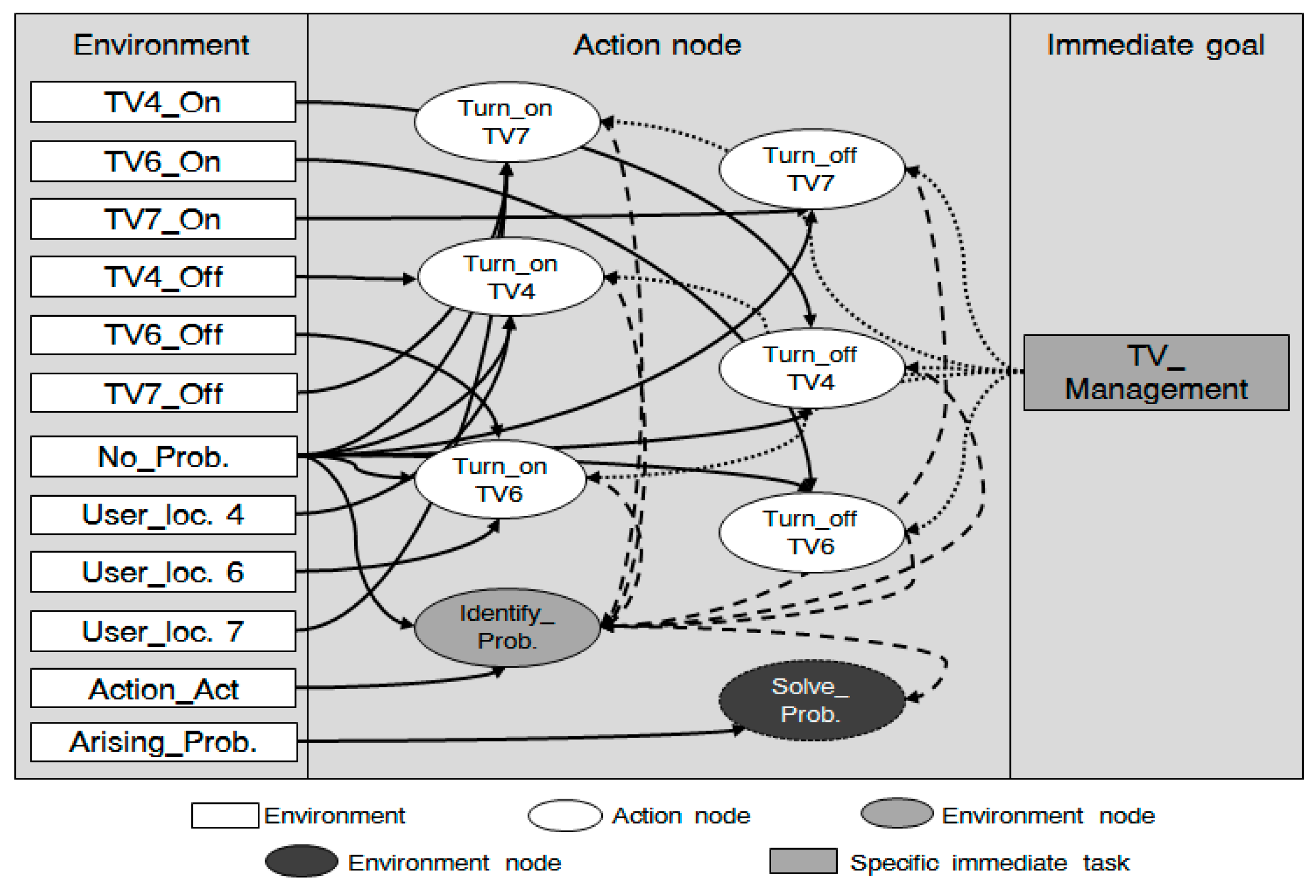
- Definition 6. The immediate goal module consists of the specific immediate goal module and the common immediate goal module . Both modules consist of the local environments and the action of goal as follows.The immediate goal is not achieved by a sequence, but achieved by the actions carried out continuously. These executable actions change in the current state of the local environment; the set of actions for achieving the immediate goal is not fixed.
- Definition 7. The specific immediate goal module aims to respond to the intention in specific situations. This module consists of four parameters. defines the response to conduct the service, and presents the common responses that are performed on the various modules. For example, “turning off the light” is the response of intention that is to control the light only. Sending a warning message, however, is the response that can occur in several intentions.
- Definition 8. The common immediate goal module is not used in specific situations. Sometimes, it is conducted as a sub-task in the specific task modules.
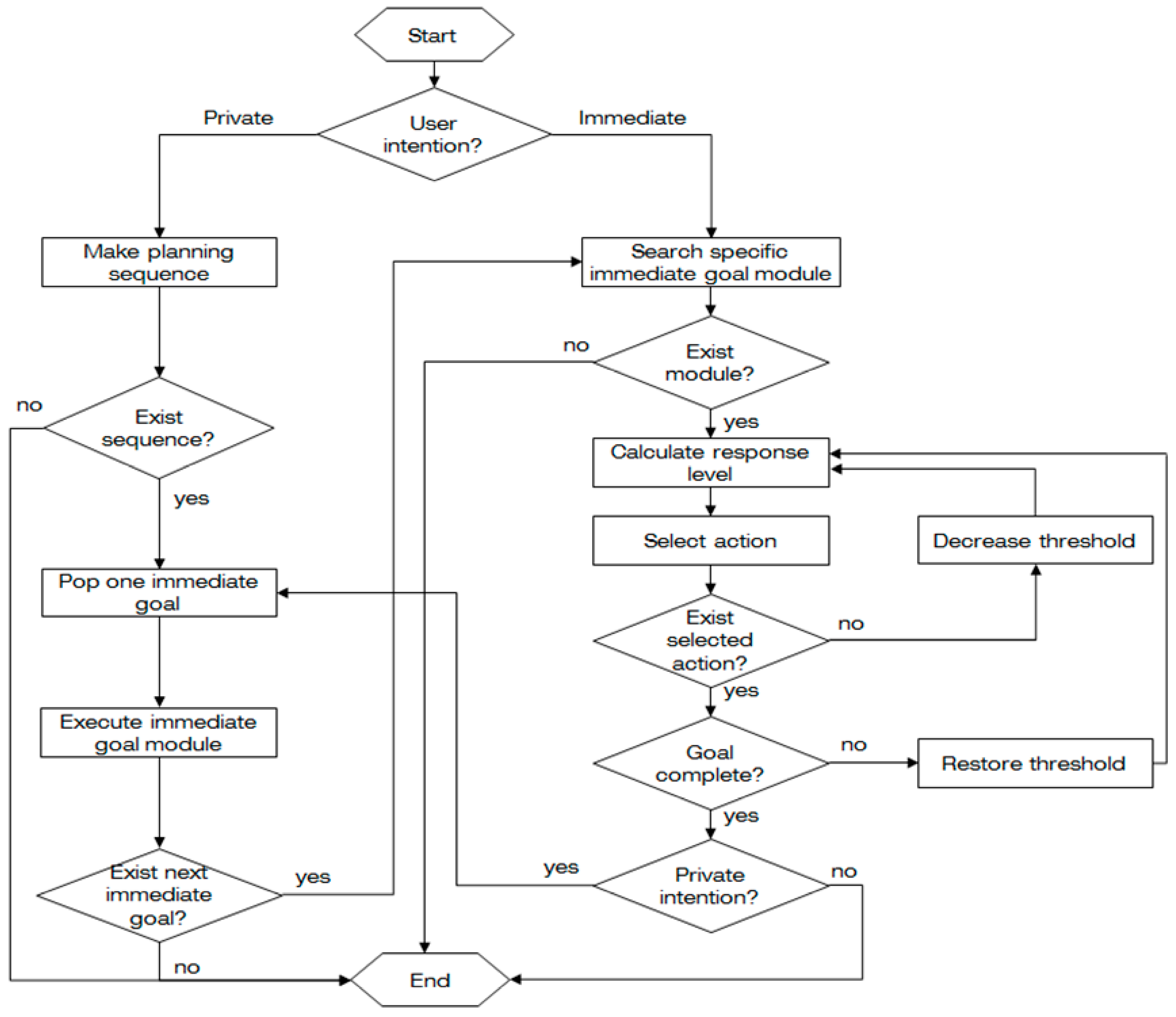
3.3. Action Selection
4. Experiments
4.1. Response Rate
4.2. Processing Time
4.3. Accuracy
5. Concluding Remarks
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zhou, B.; Li, W.; Chan, K.W.; Cao, Y.; Kuang, Y.; Liu, X.; Wang, X. Smart home energy management systems: Concept, configurations, and scheduling strategies. Renew. Sustain. Energy Rev. 2016, 61, 30–40. [Google Scholar] [CrossRef]
- Li, W.; Logenthiran, T.; Woo, W.L. Intelligent multi-agent system for smart home energy management. In Proceedings of the 2015 IEEE Innovative Smart Grid Technologies—Asia (ISGT ASIA), Bangkok, Thailand, 3–6 November 2015; pp. 1–6.
- Tushar, W.; Yuen, C.; Chai, B.; Huang, S.; Wood, K.L.; Kerk, S.G.; Yang, Z. Smart Grid Testbed for Demand Focused Energy Management in End User Environments. Available online: https://susy.mdpi.com/user/managing/production_form/c2a94c9eb584b63398e442c20075fefc (assessed on 16 September 2016).
- Wu, C.-L.; Fu, L.-C. Design and realization of a framework for human–system interaction in smart homes. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2012, 42, 15–31. [Google Scholar] [CrossRef]
- Piyare, R.; Lee, S.R. Smart home-control and monitoring system using smart phone. ICCA ASTL 2013, 24, 83–86. [Google Scholar]
- Edwards, W.; Grinter, R. At home with ubiquitous computing: Seven challenges. In Proceedings of the International Conference on Ubiquitous Computing, Atlanta, GA, USA, 30 September–2 October 2001; pp. 256–272.
- Bregman, D.; Korman, A. A universal implementation model for the smart home. Int. J. Smart Home 2009, 3, 15–29. [Google Scholar]
- Parra, J.; hossain, A.; Uribarren, A.; Jacob, E.; Saddic, E.A. Flexible smart home architecture using device profile for web services: A peer to peer approach. Int. J. Smart Home 2009, 3, 39–55. [Google Scholar]
- Hwang, Z.; Uhm, Y.; Lee, M.; Kim, Y.; Park, S. Service-oriented multi agent middleware using information fusion and service prediction in pervasive environments. In Proceedings of the International Conference on Advances in Future Internet (AFIN), Venice/Mestre, Italy, 18–25 July 2010; pp. 25–30.
- Min, H.K. Context agent for smart home resident. Comput. Autom. Eng. 2010, 4, 354–357. [Google Scholar]
- Wang, C.-D.; Mo, X.-L.; Wang, H.-B. An intelligent home middleware system based on context-awareness. Natl. Comput. 2009, 5, 165–169. [Google Scholar]
- Ge, Y.; Xu, B. Elderly Personal Intention Recognition by Activity and Context Recognition in Smart Home. In Proceedings of the 9th International Conference on Computer Science & Education (ICCSE), Vancouver, BC, Canada, 22–24 August 2014; pp. 347–350.
- Kim, K.; Jeong, M.; Lee, G.G. Improving Speech Recognition Using Semantic and Reference Features in a Multimodal Dialog System. In Proceedings of the 16th IEEE International Symposium on Robot and Human interactive Communication, Washington, DC, USA, 26–29 August 2007; pp. 416–420.
- Evchina, Y.; Dvoryanchikova, A.; Lastra, J.L.M. Ontological framework of context-aware and reasoning middleware for smart homes with health and social services. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC), Seoul, Korea, 14–17 October 2012; pp. 985–990.
- Zhao, G.; Shen, Z. Intrinsically motivated agent for service management in smart home. In Proceedings of the Network of Ergonomics Societies Conference (SEANES), Langkawi, Malaysia, 9–12 July 2012; pp. 1–6.
- Soda, S.; Nakamura, M.; Matsumoto, S.; Izumi, S.; Kawaguchi, H.; Yoshimoto, M. Implementing virtual agent as an interface for smart home voice control. In Proceedings of the 19th Asia-Pacific Software Engineering Conference (APSEC), Hong Kong, China, 4–7 December 2012; pp. 342–345.
- Giraffa, L.M.M.; Viccari, R.M. The use of agent techniques on intelligent tutoring systems. In Proceedings of the XVIII International Conference of the Chilean Society of Computer Science (SCCC’98), Antofagasta, Chile, 9–14 November 1998; pp. 76–83.
- Tong, H.; Cao, J.; Zhang, S. An agent-based web service workflow model. In Proceedings of the IEEE International Conference on Networking, Sensing, and Control, Sanya, China, 6–8 April 2008; pp. 1583–1588.
- Shen, Z.; Miao, C.; Tao, X.; Gay, R. Goal oriented modeling for intelligent software agents. In Proceedings of the IEEE/WIC/ACM International Conference on Intelligent Agent Technology, Beijing, China, 20–24 September 2004; pp. 540–543.
- George, A. Intelligent agent based architecture for patient monitoring in bio sensor networks. In Computational Intelligence and Information Technology; Springer: Berlin/Heidelberg, Germany, 2011; pp. 180–186. [Google Scholar]
- Yang, S.; Gechter, F.; Koukam, A. Application of reactive multi-agent system to vehicle collision avoidance. In Proceedings of the 20th IEEE International Conference on Tools with Artificial Intelligence (ICTAI’08), Dayton, OH, USA, 3–5 November 2008; pp. 197–204.
- Dillenbourg, P.; Jermann, P.; Schneider, D.; Traum, D.; Buiu, C. The design of MOO agents: Implications from an empirical CSCW study. In Proceedings of the 8th World Conference on Artificial Intelligence in Education, Kobe, Japan, 19–22 August 1997; pp. 12–14.
- Lee, Y.-S.; Cho, S.-B. A Hybrid System of hierarchical planning of behavior selection networks for mobile robot control. Int. J. Adv. Robot. Syst. 2014, 11, 1–12. [Google Scholar]
- Wooldridge, M.; Jennings, N.R. Intelligent agents: Theory and practice. Knowl. Eng. Rev. 1995, 10, 115–152. [Google Scholar] [CrossRef]
- Godbole, D.N.; Lygeros, J.; Sastry, S. Hierarchical Hybrid Control: A Case Study; Springer: Berlin/Heidelberg, Germany, 1995; pp. 166–190. [Google Scholar]
- Hamilton, A.C.; Grafton, S.T. Goal representation in human anterior intraparietal sulcus. J. Neurosci. 2006, 26, 1133–1137. [Google Scholar] [CrossRef] [PubMed]
- Hamilton, A.C.; Grafton, S.T. Action outcomes are represented in human inferior frontoparietal cortex. Cereb. Cortex 2008, 18, 1160–1168. [Google Scholar] [CrossRef] [PubMed]
- Yang, K.-M.; Cho, S.-B. STRIPS Planning with Modular Behavior Selection Networks for Smart Home Agents. In Proceedings of the IEEE International Conference on Ubiquitous Intelligence and Computing (UIC), Vietri sul Mare, Italy, 18–20 December 2013; pp. 301–307.
- Grafton, S.T.; Tipper, C.M. Decoding intention: A neuroergonomic perspective. NeuroImage 2012, 59, 14–24. [Google Scholar] [CrossRef] [PubMed]
- Wilkins, D.E. Practical planning: Extending the classical AI planning paradigm. Morgan Kaufmann 1988, 1, 7–38. [Google Scholar]
- Maes, P. How to do the right thing. Connect. Sci. J. 1989, 1, 291–323. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | User State | User Intention | Device State | Environment | Method |
|---|---|---|---|---|---|
| Bregman et al. [7] | ○ | × | ○ | ○ | Rule-based |
| Parra et al. [8] | ○ | × | ○ | ○ | Rule-based |
| Hwang et al. [9] | ○ | × | ○ | ○ | Ontology |
| Min [10] | ○ | × | ○ | Rule-based | |
| Wang et al. [11] | ○ | × | × | ○ | Naive Bayes |
| Wu et al. [4] | ○ | × | ○ | ○ | Rule-based |
| Ge and Xu [12] | ○ | × | ○ | ○ | HMM |
| Kim et al. [13] | × | ○ | ○ | × | HMM |
| Evchina et al. [14] | × | ○ | ○ | ○ | Ontology |
| Zhao et al. [15] | × | ○ | ○ | ○ | Goal-network |
| Soda et al. [16] | × | ○ | ○ | × | Rule-based |
| Authors | Service | Reactive | Deliberative |
|---|---|---|---|
| Tong [18] | Web service | × | ○ |
| Shen et al. [19] | Grid service | × | ○ |
| George et al. [20] | Patient monitoring | ○ | × |
| Yang et al. [21] | Vehicle collision avoidance | ○ | × |
| Dillienbourg et al. [22] | Tutoring service | ○ | ○ |
| Lee et al. [23] | Delivery service | ○ | ○ |
| Task Goal | Sub-Immediate Goal |
|---|---|
| Energy saving | {Light management, TV management, radio management} |
| Appliance management | {TV management, radio management} |
| Air-condition management | {Air-conditioner management, window management} |
| Immediate Goal | Action |
|---|---|
| Light management | {Turn on main light in living room, turn on lamp in living room, turn on light on wall, turn on light in kitchen, turn on light in corridor, turn on light in main room, turn on desk lamp in main room, turn off main light in living room, turn off light lamp in living room, turn off light on wall, turn off light in kitchen, turn off light in corridor, turn off light in main room, turn off desk lamp in main room, checking problem, solving problem} |
| TV management | {Turn on TV in kitchen, turn on TV in living room, turn on TV in main room, turn off TV in kitchen, turn off TV in living room, turn off TV in main room, checking problem, solving problem} |
| Radio management | {Turn on radio in kitchen, turn on radio in living room, turn on radio in main room, turn off radio in kitchen, turn off radio in living room, turn off radio in main room, checking problem, solving problem} |
| Air-Conditioner management | {Turn on air-conditioner in living room, turn off air-conditioner in living room, checking problem, solving problem} |
| Window management | {Open left window in balcony, open right window in balcony, open right window in main room, open left window in main room, open center window in back garden, open right window in back garden, open left window in back garden, close left window in balcony, close right window in balcony, close right window in main room, close left window in main room, close center window in back garden, close left window in back garden, close right window in back garden, checking problem, solving problem} |
| Type | Mean | Standard Deviation | Standard Error Mean | t-Value | Significance |
|---|---|---|---|---|---|
| R100 | 2.00 | 0.81 | 0.25 | 7.74 | 0.000 |
| R150 | 1.20 | 0.91 | 0.29 | 4.12 | 0.003 |
| R200 | 0.70 | 0.67 | 0.21 | 3.28 | 0.010 |
| Type | Mean | Standard Deviation | Standard Error Mean | t-Value | Significance |
|---|---|---|---|---|---|
| Command + BSN | −7.01 | 0.06 | 0.02 | −345.22 | 0.000 |
| Rule + BSN | −5.31 | 0.05 | 0.01 | −361.45 | 0.0001 |
| Subject | Immediate Intention | Private Intention | |||||||
|---|---|---|---|---|---|---|---|---|---|
| TV | Radio | Light | Air-Conditioner | Window | Energy Saving | Appliance | Temperature | Average | |
| 1 | 100 | 96 | 80 | 100 | 92 | 88 | 98 | 96 | 93.8 |
| 2 | 60 | 72 | 76 | 92 | 40 | 60 | 66 | 66 | 66.6 |
| 3 | 80 | 88 | 76 | 84 | 84 | 76 | 84 | 84 | 82 |
| 4 | 86 | 76 | 72 | 100 | 76 | 76 | 82 | 88 | 82 |
| 5 | 100 | 72 | 56 | 100 | 40 | 80 | 86 | 70 | 75.6 |
| 6 | 88 | 84 | 92 | 100 | 100 | 82 | 86 | 100 | 91.6 |
| 7 | 76 | 76 | 76 | 100 | 68 | 72 | 76 | 84 | 78.6 |
| Average | 84.29 | 80.57 | 75.43 | 96.57 | 71.43 | 76.29 | 82.57 | 84.00 | 81.46 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, K.; Cho, S.-B. Towards Sustainable Smart Homes by a Hierarchical Hybrid Architecture of an Intelligent Agent. Sustainability 2016, 8, 1020. https://doi.org/10.3390/su8101020
Yang K, Cho S-B. Towards Sustainable Smart Homes by a Hierarchical Hybrid Architecture of an Intelligent Agent. Sustainability. 2016; 8(10):1020. https://doi.org/10.3390/su8101020
Chicago/Turabian StyleYang, K., and Sung-Bae Cho. 2016. "Towards Sustainable Smart Homes by a Hierarchical Hybrid Architecture of an Intelligent Agent" Sustainability 8, no. 10: 1020. https://doi.org/10.3390/su8101020
APA StyleYang, K., & Cho, S. -B. (2016). Towards Sustainable Smart Homes by a Hierarchical Hybrid Architecture of an Intelligent Agent. Sustainability, 8(10), 1020. https://doi.org/10.3390/su8101020