
Laboratory Tests in the Development of WaveCat




Abstract
:1. Introduction
2. Materials and Methods
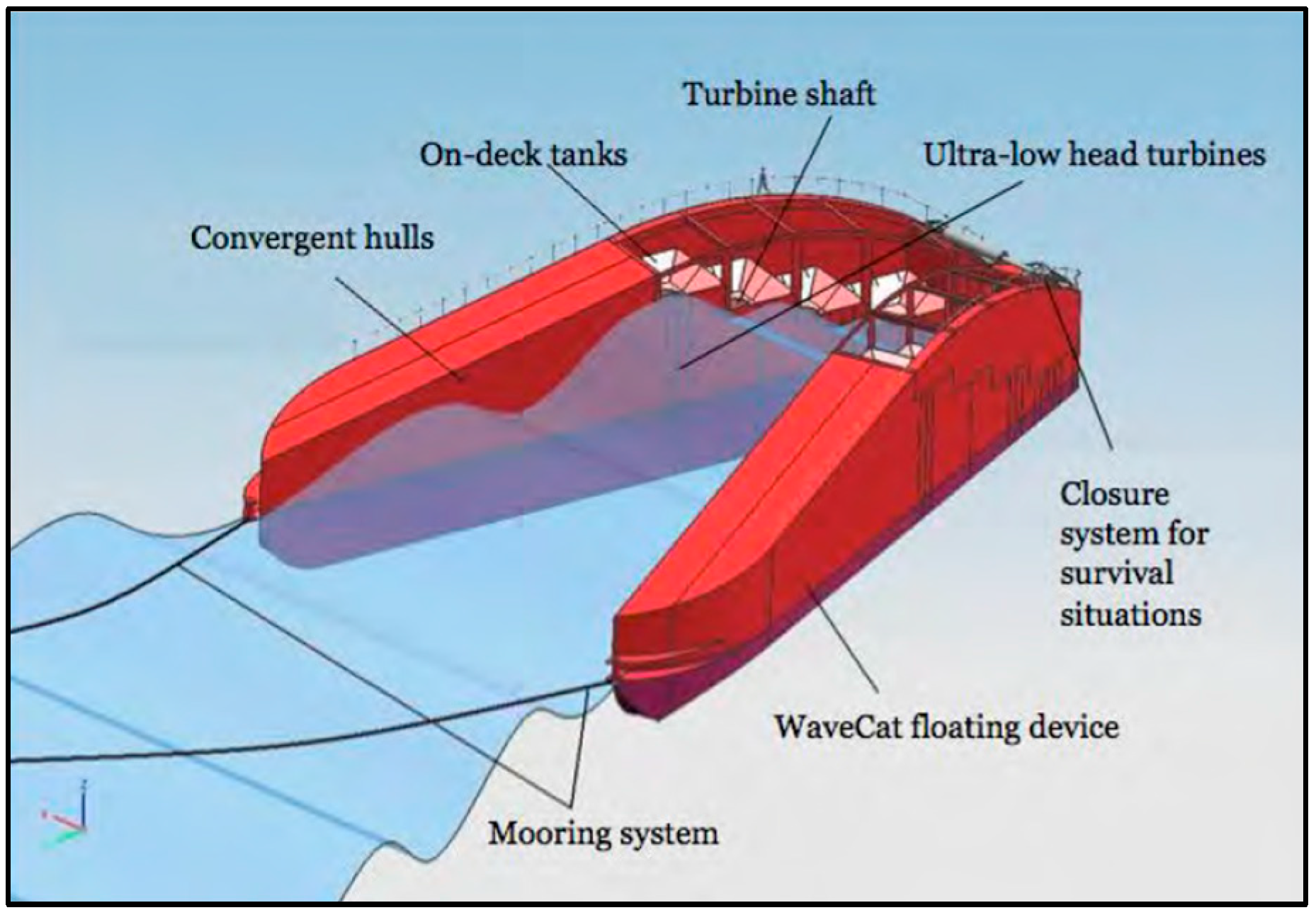
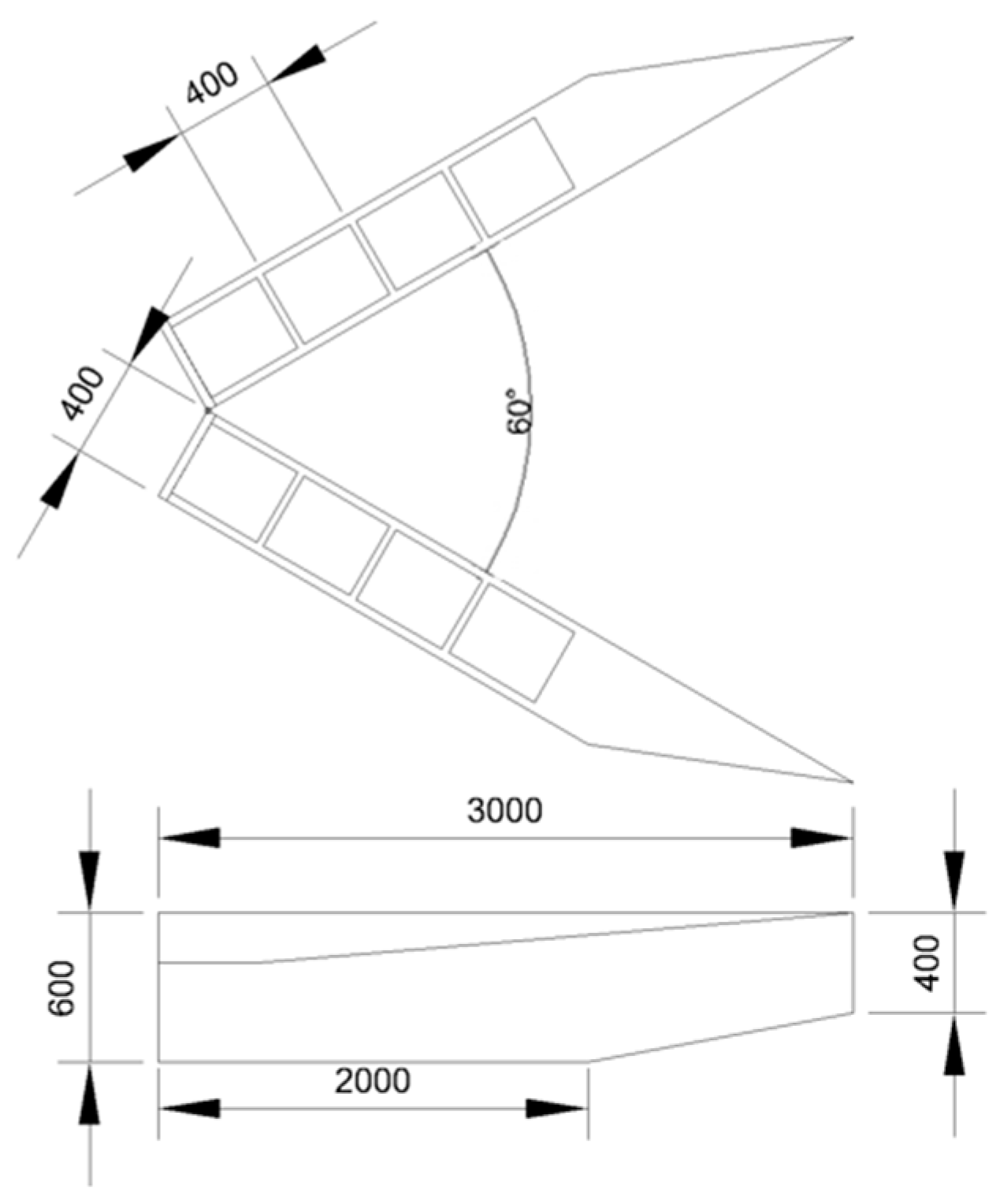
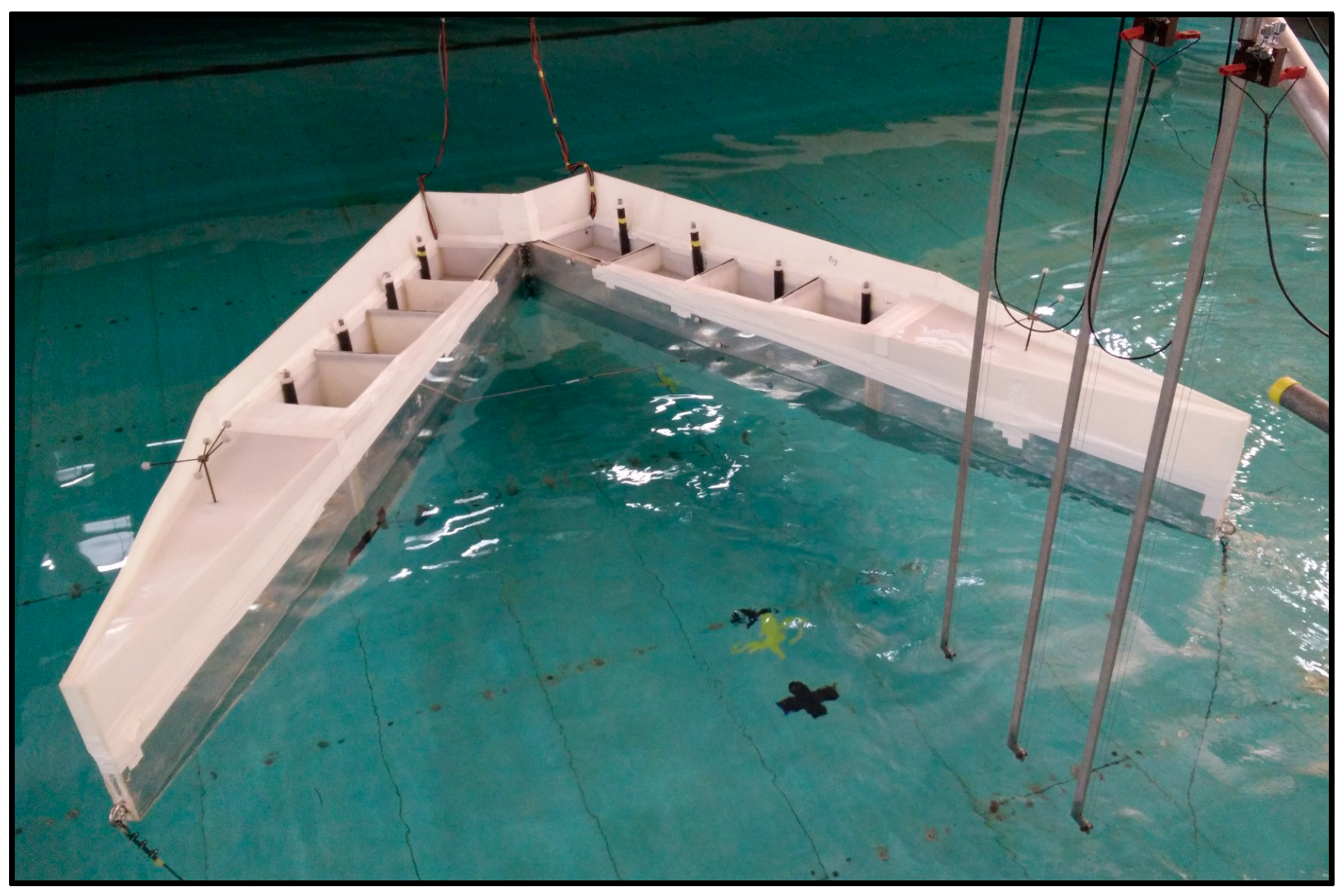
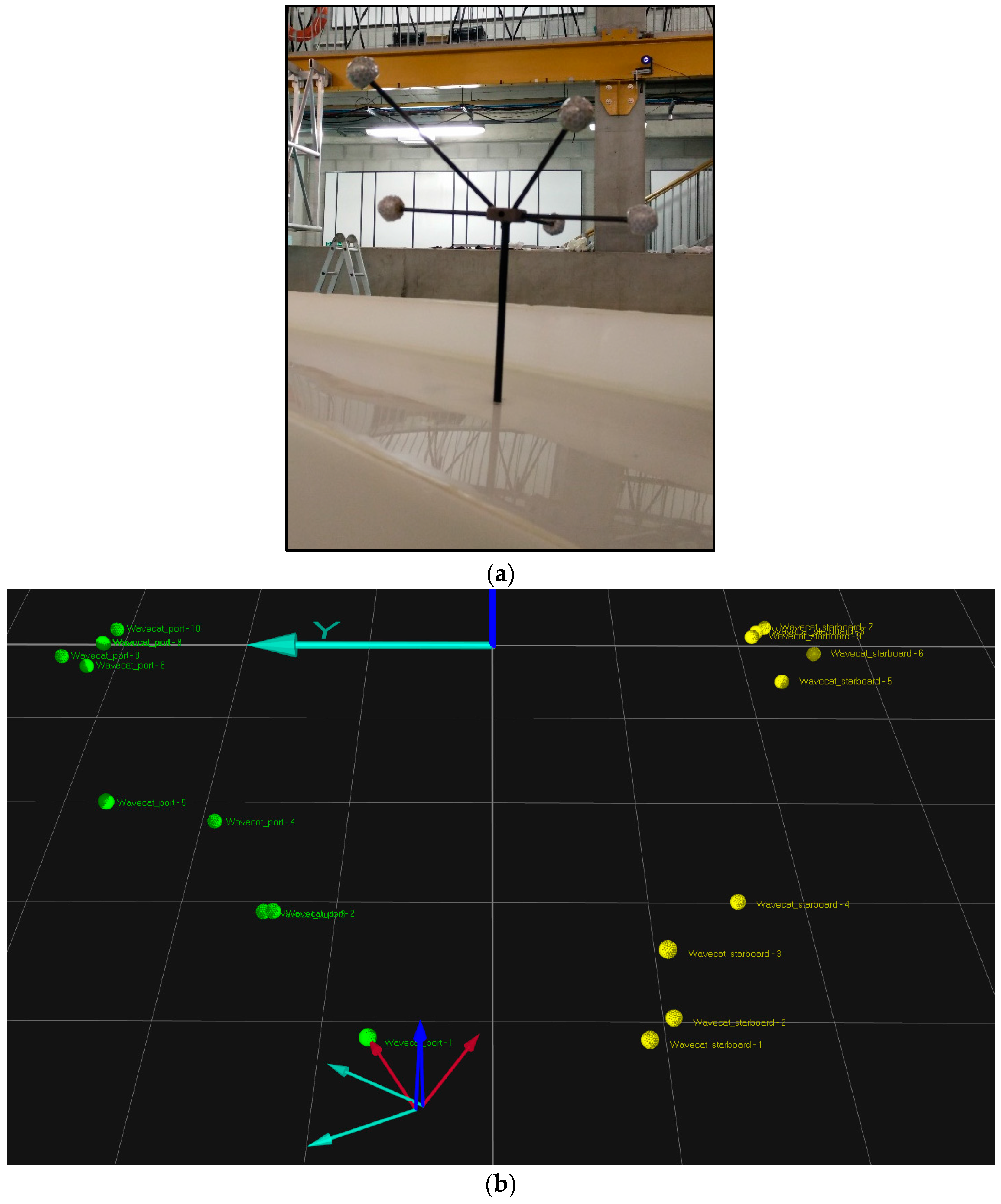
2.1. The WaveCat Model and Instrumentation
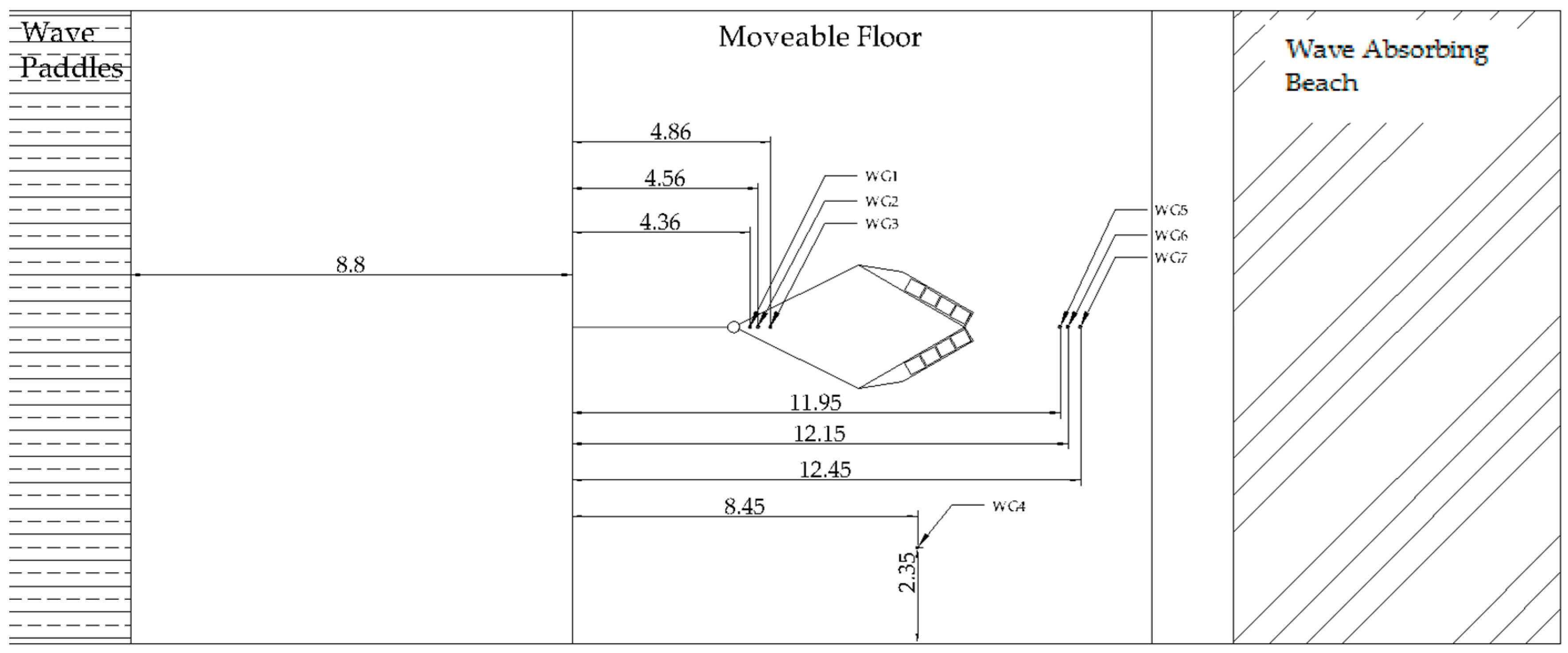
2.2. The Wave Tank, Experimental Setup and Test Campaign
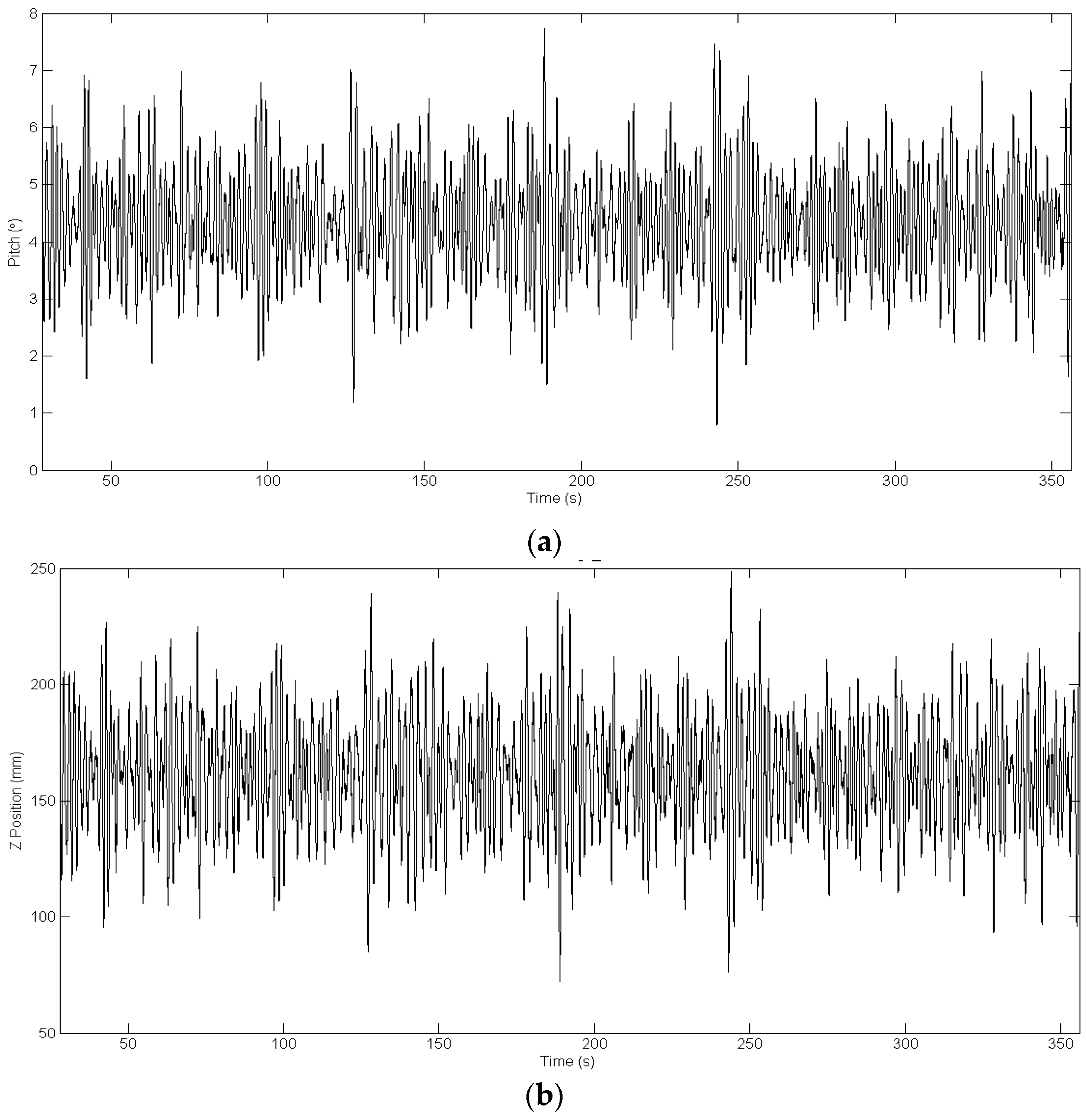
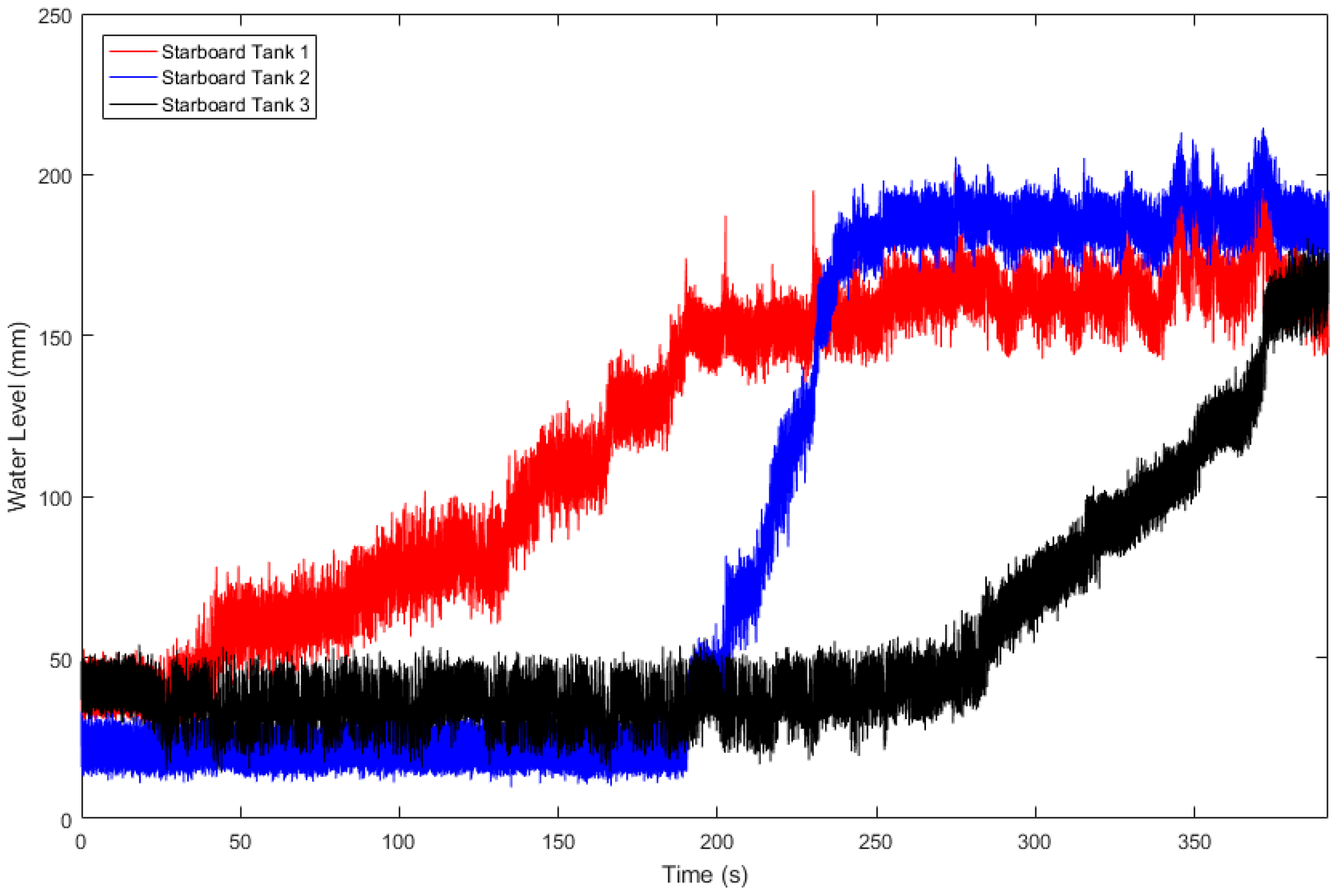
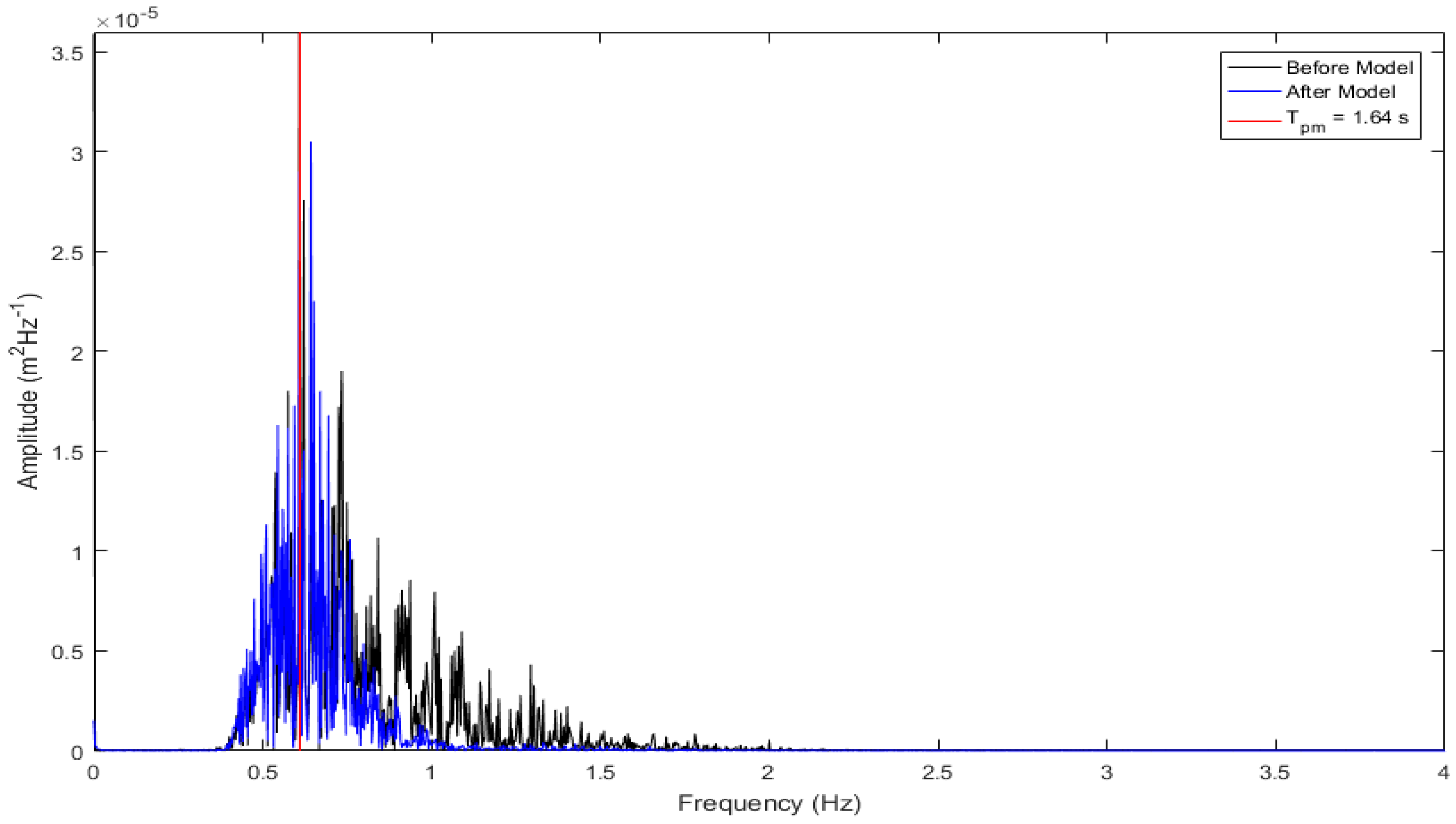
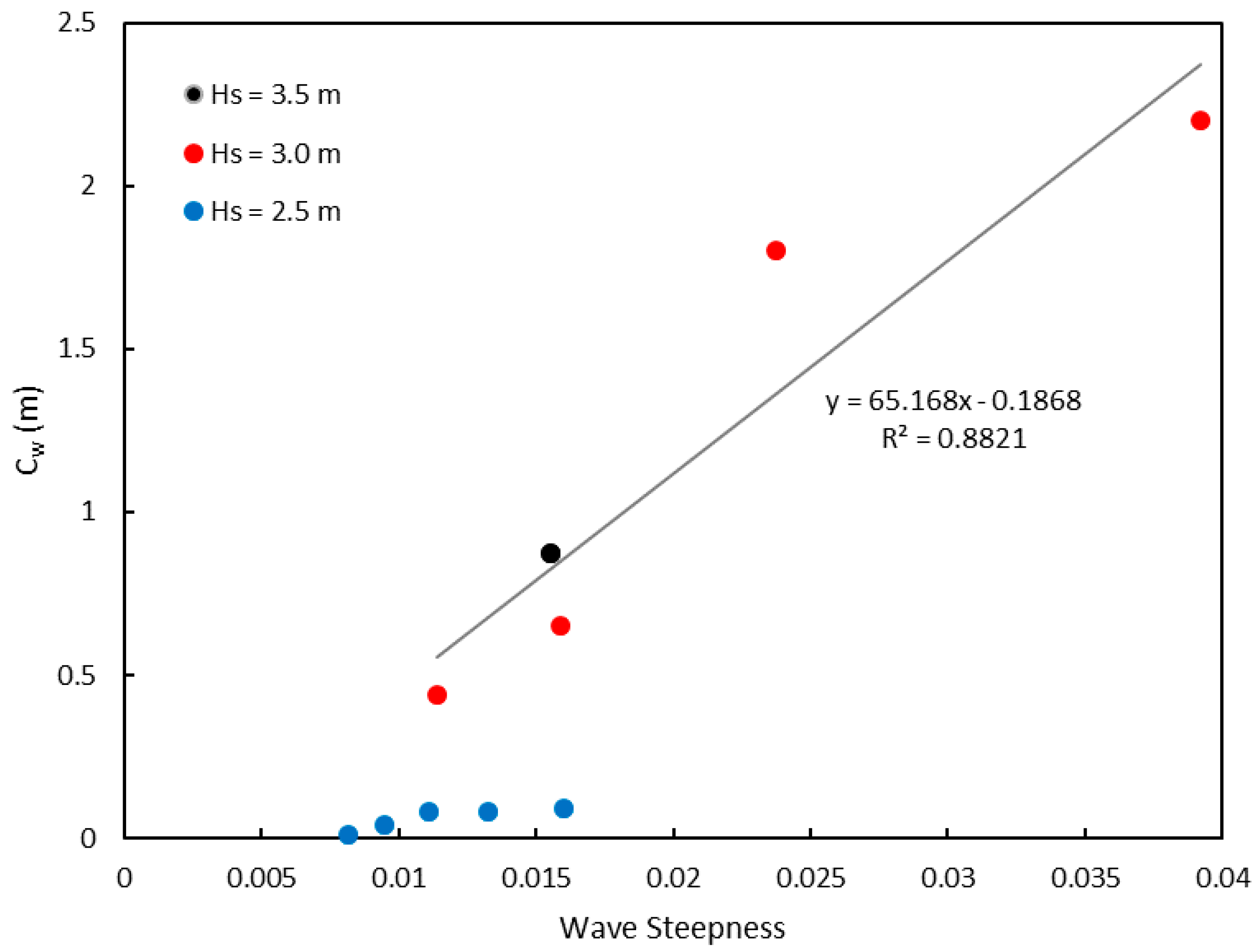
3. Results and Discussion
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| WEC | Wave Energy Converter |
| CALM | Catenary Anchor Leg Mooring |
| 6DOF | Six Degrees of Freedom |
| Hsm | Significant Wave Height—Model Scale |
| Tpm | Peak Period—Model Scale |
| Hs | Significant Wave Height—Prototype Scale |
| Tp | Peak Period—Prototype Scale |
| WG | Wave Gauge |
| CWR | Capture Width Ratio |
References
- European Parliament, Council of the European Union. Directive 2009/28/EC on the promotion of the use of energy from renewable sources. Off. J. EU 2009, 140, 16–62. [Google Scholar]
- Lund, H. Renewable energy strategies for sustainable development. Energy 2007, 32, 912–919. [Google Scholar] [CrossRef]
- Iglesias, G.; Carballo, R. Wave energy potential along the death coast (Spain). Energy 2009, 34, 1963–1975. [Google Scholar] [CrossRef]
- Iglesias, G.; Carballo, R. Wave resource in El Hierro—An island towards energy self-sufficiency. Renew. Energy 2011, 36, 689–698. [Google Scholar] [CrossRef]
- Iglesias, G.; Carballo, R. Wave energy resource in the Estaca de Bares area (Spain). Renew. Energy 2010, 35, 1574–1584. [Google Scholar] [CrossRef]
- Iglesias, G.; López, M.; Carballo, R.; Castro, A.; Fraguela, J.A.; Frigaard, P. Wave energy potential in Galicia (NW Spain). Renew. Energy 2009, 34, 2323–2333. [Google Scholar] [CrossRef]
- Mirzaei, A.; Tangang, F.; Juneng, L. Wave energy potential assessment in the central and southern regions of the South China Sea. Renew. Energy 2015, 80, 454–470. [Google Scholar] [CrossRef]
- Carballo, R.; Sánchez, M.; Ramos, V.; Fraguela, J.A.; Iglesias, G. The intra-annual variability in the performance of wave energy converters: A comparative study in N Galicia (Spain). Energy 2015, 82, 138–146. [Google Scholar] [CrossRef]
- Iglesias, G.; Carballo, R. Offshore and inshore wave energy assessment: Asturias (N Spain). Energy 2010, 35, 1964–1972. [Google Scholar] [CrossRef]
- Iglesias, G.; Carballo, R. Wave energy and nearshore hot spots: The case of the SE Bay of Biscay. Renew. Energy 2010, 35, 2490–2500. [Google Scholar] [CrossRef]
- Sierra, J.P.; González-Marco, D.; Sospedra, J.; Gironella, X.; Mösso, C.; Sánchez-Arcilla, A. Wave energy resource assessment in Lanzarote (Spain). Renew. Energy 2013, 55, 480–489. [Google Scholar] [CrossRef]
- Neill, S.P.; Hashemi, M.R. Wave power variability over the northwest European shelf seas. Appl. Energy 2013, 106, 31–46. [Google Scholar] [CrossRef]
- Carballo, R.; Sánchez, M.; Ramos, V.; Fraguela, J.A.; Iglesias, G. Intra-annual wave resource characterization for energy exploitation: A new decision-aid tool. Energy Convers. Manag. 2015, 93, 1–8. [Google Scholar] [CrossRef]
- López-Ruiz, A.; Bergillos, R.J.; Ortega-Sánchez, M. The importance of wave climate forecasting on the decision-making process for nearshore wave energy exploitation. Appl. Energy 2016, 182, 191–203. [Google Scholar] [CrossRef]
- Guanche, R.; de Andrés, A.; Losada, I.J.; Vidal, C. A global analysis of the operation and maintenance role on the placing of wave energy farms. Energy Convers. Manag. 2015, 106, 440–456. [Google Scholar] [CrossRef]
- Abanades, J.; Greaves, D.; Iglesias, G. Wave farm impact on the beach profile: A case study. Coast. Eng. 2014, 86, 36–44. [Google Scholar] [CrossRef]
- Abanades, J.; Greaves, D.; Iglesias, G. Wave farm impact on beach modal state. Mar. Geol. 2015, 361, 126–135. [Google Scholar] [CrossRef]
- Rusu, E.; Onea, F. Study on the influence of the distance to shore for a wave energy farm operating in the central part of the Portuguese nearshore. Energy Convers. Manag. 2016, 114, 209–223. [Google Scholar] [CrossRef]
- Azzellino, A.; Conley, D.; Vicinanza, D.; Kofoed, J.P. Marine renewable energies: Perspectives and implications for marine ecosystems. Sci. World J. 2013, 2013. [Google Scholar] [CrossRef] [PubMed]
- Abanades, J.; Greaves, D.; Iglesias, G. Coastal defence through wave farms. Coast. Eng. 2014, 91, 299–307. [Google Scholar] [CrossRef]
- Abanades, J.; Greaves, D.; Iglesias, G. Coastal defence using wave farms: The role of farm-to-coast distance. Renew. Energy 2015, 75, 572–582. [Google Scholar] [CrossRef]
- Mendoza, E.; Silva, R.; Zanuttigh, B.; Angelelli, E.; Lykke Andersen, T.; Martinelli, L.; Nørgaard, J.Q.H.; Ruol, P. Beach response to wave energy converter farms acting as coastal defence. Coast. Eng. 2014, 87, 97–111. [Google Scholar] [CrossRef]
- Astariz, S.; Perez-Collazo, C.; Abanades, J.; Iglesias, G. Co-located wind-wave farm synergies (operation & maintenance): A case study. Energy Convers. Manag. 2015, 91, 63–75. [Google Scholar]
- Pérez-Collazo, C.; Greaves, D.; Iglesias, G. A review of combined wave and offshore wind energy. Renew. Sustain. Energy Rev. 2015, 42, 141–153. [Google Scholar] [CrossRef]
- Buccino, M.; Banfi, D.; Vicinanza, D.; Calabrese, M.; Giudice, G.; Carravetta, A. Non breaking wave forces at the front face of seawave slotcone generators. Energies 2012, 5, 4779. [Google Scholar] [CrossRef]
- Buccino, M.; Vicinanza, D.; Salerno, D.; Banfi, D.; Calabrese, M. Nature and magnitude of wave loadings at seawave slot-cone generators. Ocean Eng. 2015, 95, 34–58. [Google Scholar] [CrossRef]
- Iglesias, G.; Fernandez, H.; Carballo, R.; Castro, A.; Taveira-Pinto, F. The WaveCat ©—Development of a new wave energy converter. In Proceedings of the World Renewable Energy Congress, Linkoping, Sweden, 8–13 May 2011; pp. 2151–2158.
- Fernandez, H.; Iglesias, G.; Carballo, R.; Castro, A.; Fraguela, J.A.; Taveira-Pinto, F.; Sanchez, M. The new wave energy converter WaveCat: Concept and laboratory tests. Mar. Struct. 2012, 29, 58–70. [Google Scholar] [CrossRef]
- Fernandez, H.; Iglesias, G.; Carballo, R.; Castro, A.; Sanchez, M.; Taveira-Pinto, F. Optimization of the WaveCat wave energy converter. Coast. Eng. 2012. [Google Scholar] [CrossRef]
- Frigaard, P.; Kofoed, J.P.; Knapp, W. Wave dragon. Wave power plant using low-head turbines. In Proceedings of the Hidroenergia, Falkenberg, Sweden, 17–19 June 2004.
- Kofoed, J.P.; Frigaard, P.; Friis-Madsen, E.; Sørensen, H.C. Prototype testing of the wave energy converter Wave Dragon. Renew. Energy 2006, 31, 181–189. [Google Scholar] [CrossRef]
- Margheritini, L.; Vicinanza, D.; Frigaard, P. SSG wave energy converter: Design, reliability and hydraulic performance of an innovative overtopping device. Renew. Energy 2009, 34, 1371–1380. [Google Scholar] [CrossRef]
- Reeve, D.; Chadwick, A.; Fleming, C. Coastal Engineering: Processes, Theory and Design Practice; Taylor & Francis: Abingdon, UK, 2004. [Google Scholar]
- Babarit, A. A database of capture width ratio of wave energy converters. Renew. Energy 2015, 80, 610–628. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Case | Hsm (m) | Hs (m) | Tpm (s) | Tp (s) |
|---|---|---|---|---|
| 1 | 0.100 | 3.0 | 1.27 | 7 |
| 2 | 0.100 | 3.0 | 1.64 | 9 |
| 3 | 0.100 | 3.0 | 2.00 | 11 |
| 4 | 0.100 | 3.0 | 2.37 | 13 |
| 5 | 0.117 | 3.5 | 2.19 | 12 |
| 6 | 0.083 | 2.5 | 1.82 | 10 |
| 7 | 0.083 | 2.5 | 2.00 | 11 |
| 8 | 0.083 | 2.5 | 2.19 | 12 |
| 9 | 0.083 | 2.5 | 2.37 | 13 |
| 10 | 0.083 | 2.5 | 2.55 | 14 |
| Test Case | Hs (m) | Tp (s) | Pm (W) | P (kW) | Pwm (W·m−1) | Pw (kW·m−1) | Cw (m) |
|---|---|---|---|---|---|---|---|
| 1 | 3.0 | 7 | 0.45 | 66.57 | 0.20 | 30.2 | 2.20 |
| 2 | 3.0 | 9 | 0.48 | 71.42 | 0.27 | 39.7 | 1.80 |
| 3 | 3.0 | 11 | 0.23 | 33.95 | 0.35 | 52.0 | 0.65 |
| 4 | 3.0 | 13 | 0.19 | 28.71 | 0.44 | 65.4 | 0.44 |
| 5 | 3.5 | 12 | 0.47 | 69.12 | 0.54 | 79.9 | 0.87 |
| 6 | 2.5 | 10 | 0.02 | 2.93 | 0.21 | 31.6 | 0.09 |
| 7 | 2.5 | 11 | 0.02 | 2.71 | 0.24 | 36.1 | 0.08 |
| 8 | 2.5 | 12 | 0.02 | 3.39 | 0.28 | 40.8 | 0.08 |
| 9 | 2.5 | 13 | 0.01 | 1.88 | 0.31 | 45.4 | 0.04 |
| 10 | 2.5 | 14 | 0.00 | 0.59 | 0.34 | 49.8 | 0.01 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Allen, J.; Sampanis, K.; Wan, J.; Greaves, D.; Miles, J.; Iglesias, G. Laboratory Tests in the Development of WaveCat. Sustainability 2016, 8, 1339. https://doi.org/10.3390/su8121339
Allen J, Sampanis K, Wan J, Greaves D, Miles J, Iglesias G. Laboratory Tests in the Development of WaveCat. Sustainability. 2016; 8(12):1339. https://doi.org/10.3390/su8121339
Chicago/Turabian StyleAllen, James, Konstantinos Sampanis, Jian Wan, Deborah Greaves, Jon Miles, and Gregorio Iglesias. 2016. "Laboratory Tests in the Development of WaveCat" Sustainability 8, no. 12: 1339. https://doi.org/10.3390/su8121339
APA StyleAllen, J., Sampanis, K., Wan, J., Greaves, D., Miles, J., & Iglesias, G. (2016). Laboratory Tests in the Development of WaveCat. Sustainability, 8(12), 1339. https://doi.org/10.3390/su8121339