
Optimal Distributed Generator Allocation Method Considering Voltage Control Cost


Abstract
:1. Introduction
2. Voltage Control System in Distribution Network
2.1. The Operation Mode of DG
- (1)
- Power Factor Control Mode (PFC)
- (2)
- Voltage Control Mode (VC)
2.2. Category of Voltage Control in ADS
2.2.1. Controllable Elements in Voltage Control System
2.2.2. Decentralized Voltage Control System
- (1)
- Characteristics of the Method
- (2)
- Economical Model
- (3)
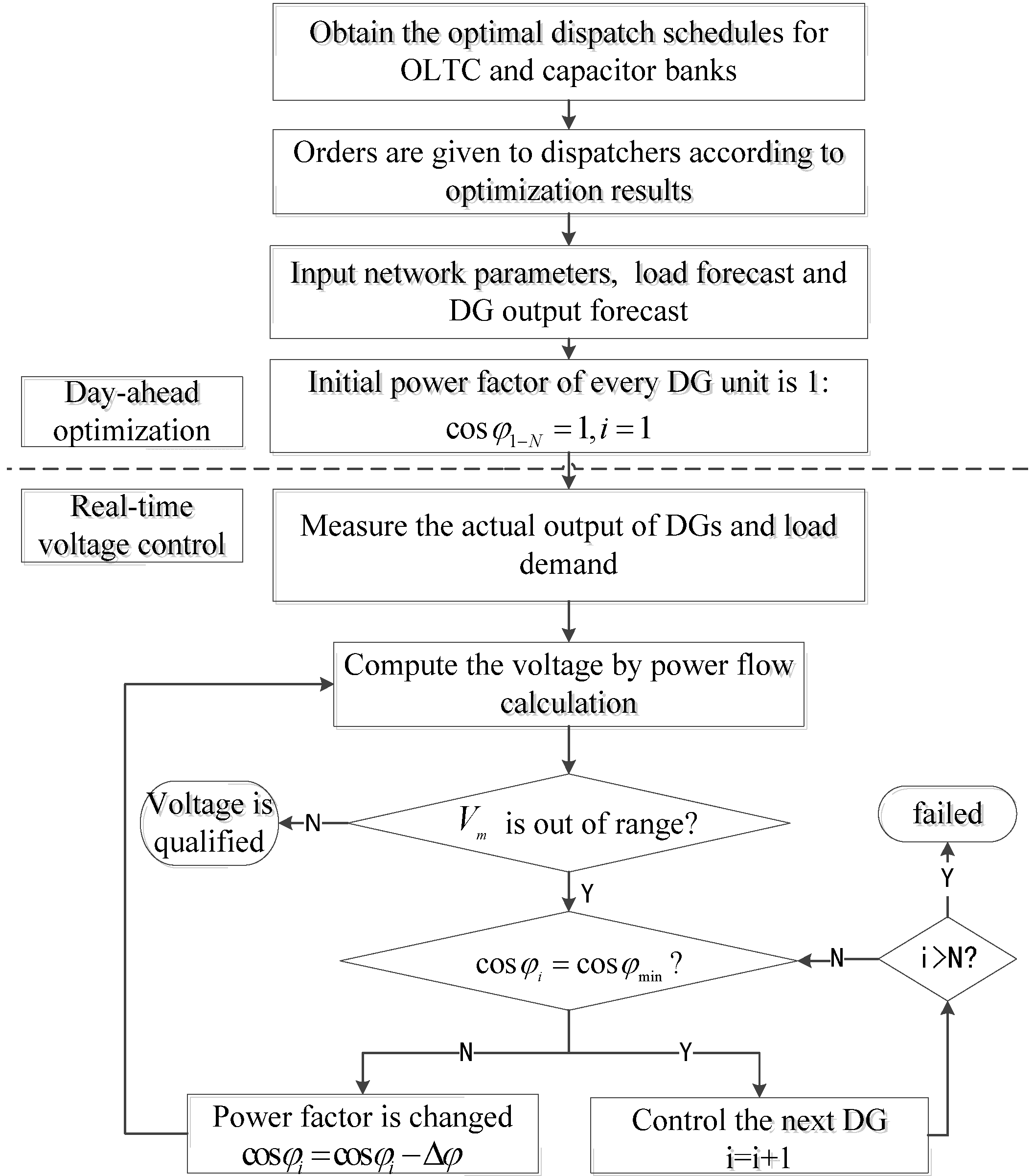
- Control Strategy
- Day-ahead optimization: Make a plan for the distribution network according to the data of typical day; and obtain the action sequence of OLTC, capacitor banks and other devices based on the results of optimization.
- Real-time decentralized voltage control: According to the stochastic models of DG generation and load, start up the voltage control system when voltage of measured node exceeds limits and adjust power factor of DGs successively for under-excited operation.
- Stop voltage control operation when the power factor of the last DG unit reaches cosϕmin (capacitive) but voltage remains unqualified, which means this voltage control strategy unable to adjust the voltage to normal level.
2.2.3. Centralized Voltage Control System
- (1)
- Characteristics of the Method
- (2)
- Economical Model
- (3)
- Control Strategy
3. Capacity Optimization of DG Considering Voltage Control
3.1. DGs Capacity Optimization Model
3.1.1. Objective Functions
Objective Function 1: Minimizing Comprehensive Cost
Objective Function 2: Maximizing Clean Energy Generation Ratio
3.1.2. Constraints
Constraint 1: Constraints of Voltage Qualified Rate
Constraint 2: Constraints of DGs’ Annual Comprehensive Cost
Constraint 3: Constraints of Power Flow Equations
Constraint 4: Constraints of DG Capacity
3.2. Multi-Objective Differential Evolution Algorithm
- (1)
- Population Initialization
- (2)
- Mutation Operation
- (3)
- Crossover Operation
- (4)
- Selection Operation
- (5)
- Non-Dominated Ranking
- (6)
- Calculation of Congestion Degree
- (7)
- Shear Operation
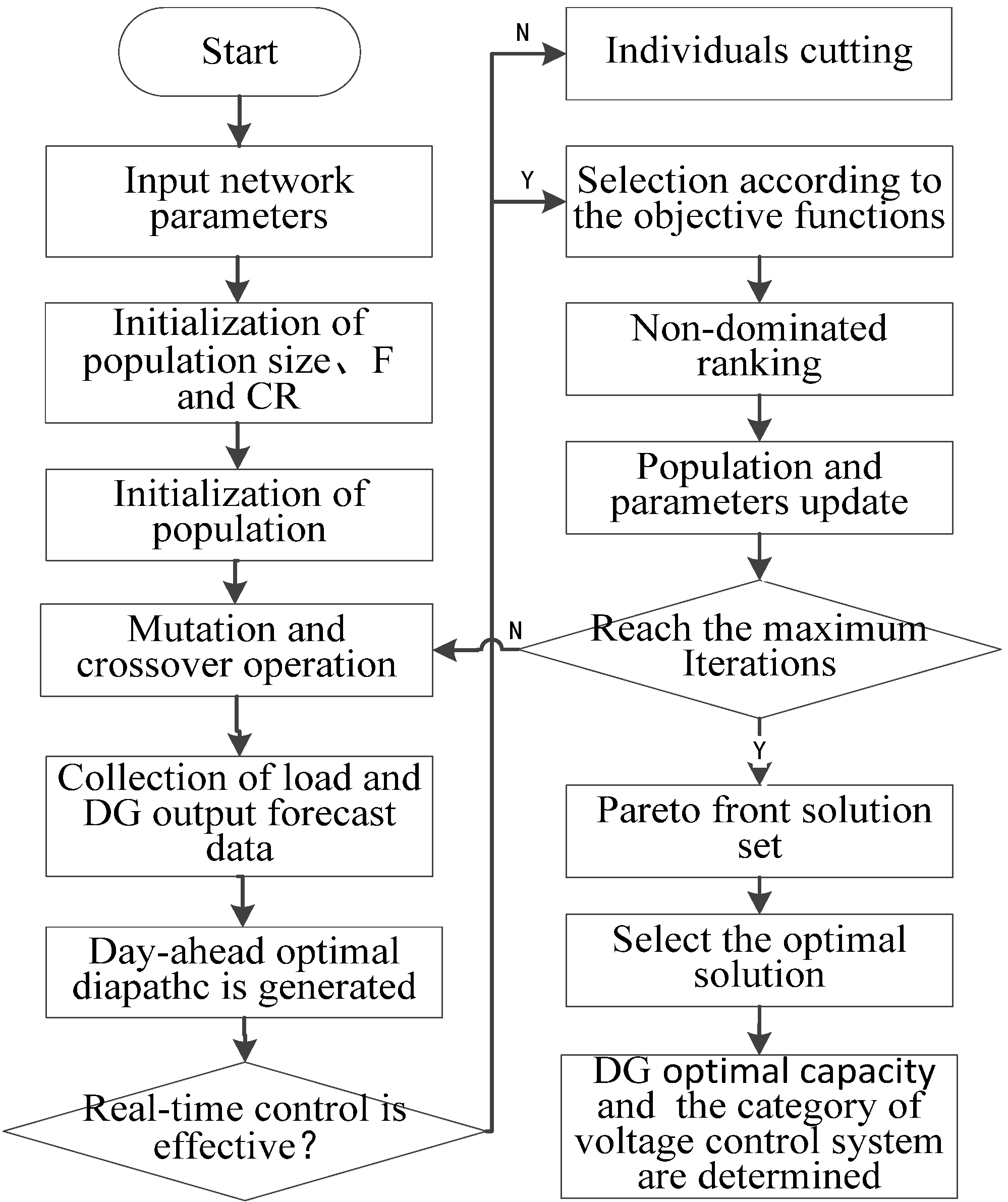
3.3. Optimization Based on Multi-Objective Differential Evolution Algorithm
- Input the network parameters, initialize the parameters and population, and then conduct the mutation and crossover operations.
- According to the data of typical day, determine the day-ahead optimal dispatch schedule. According to the actual load and output of DG, simulate the real-time voltage regulation with DG participation.
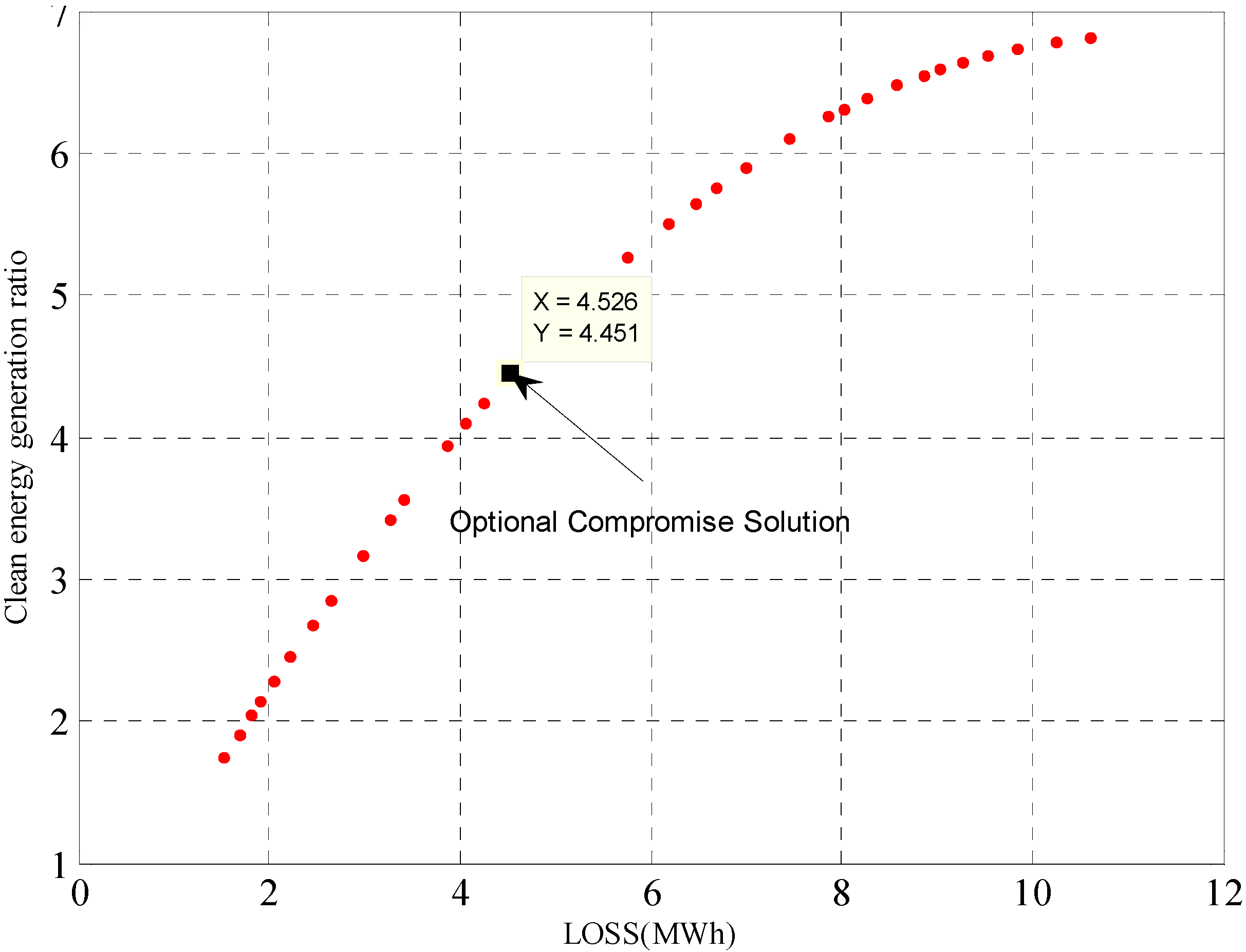
- Taking minimal DGs’ comprehensive cost and maximal clean energy generation ratio as multi-objective functions and voltage qualified rate as constraint, the optimal compromise solution is solved by intelligent algorithm, and then the most appropriate DG capacity is selected.
4. Case Study
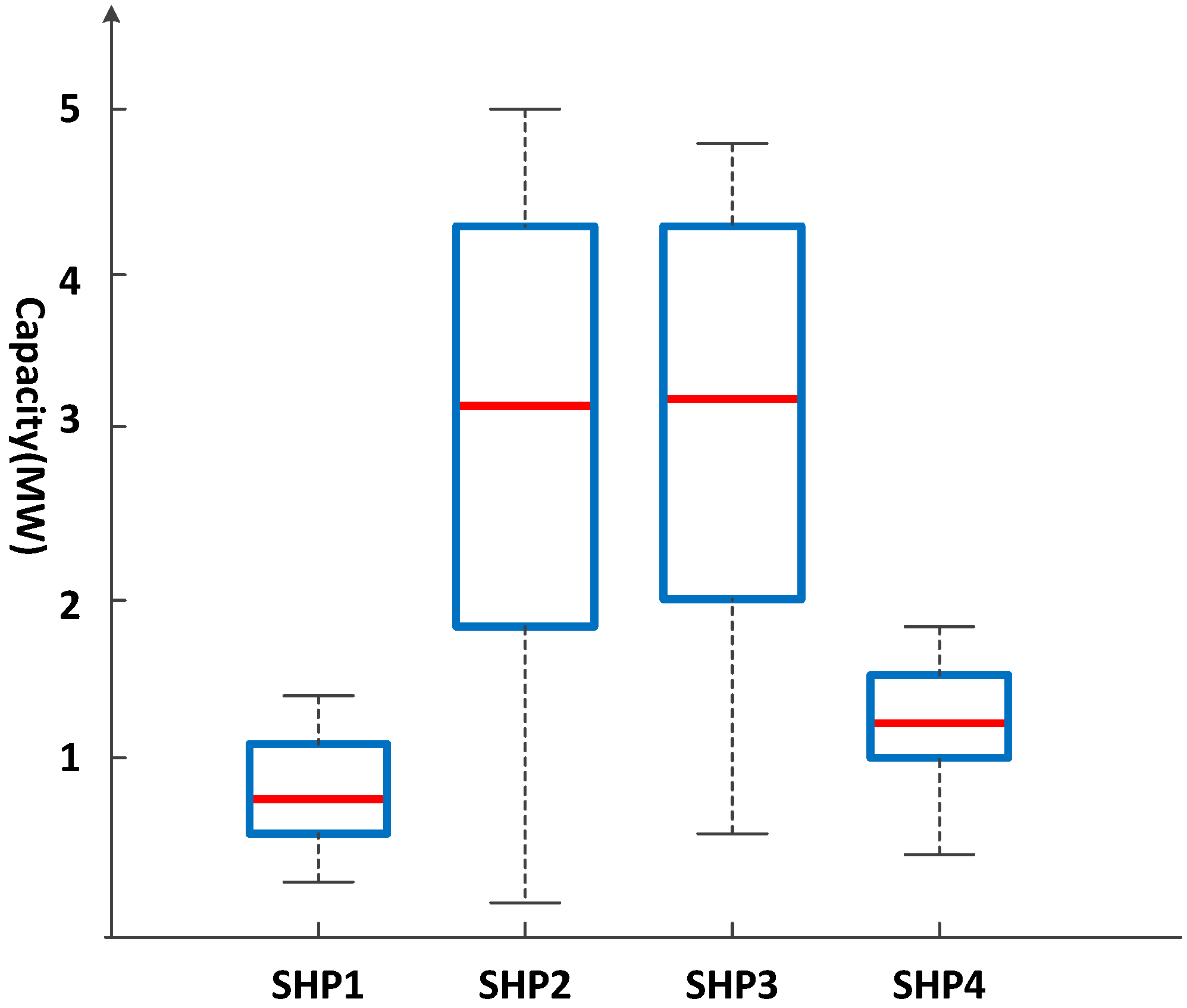
4.1. Stochastic Modeling of SHP Generation and Load
4.2. Simulation Analysis of Multi-Objective Functions Capacity Optimization
4.3. Influence of Voltage Control System on DG Capacity
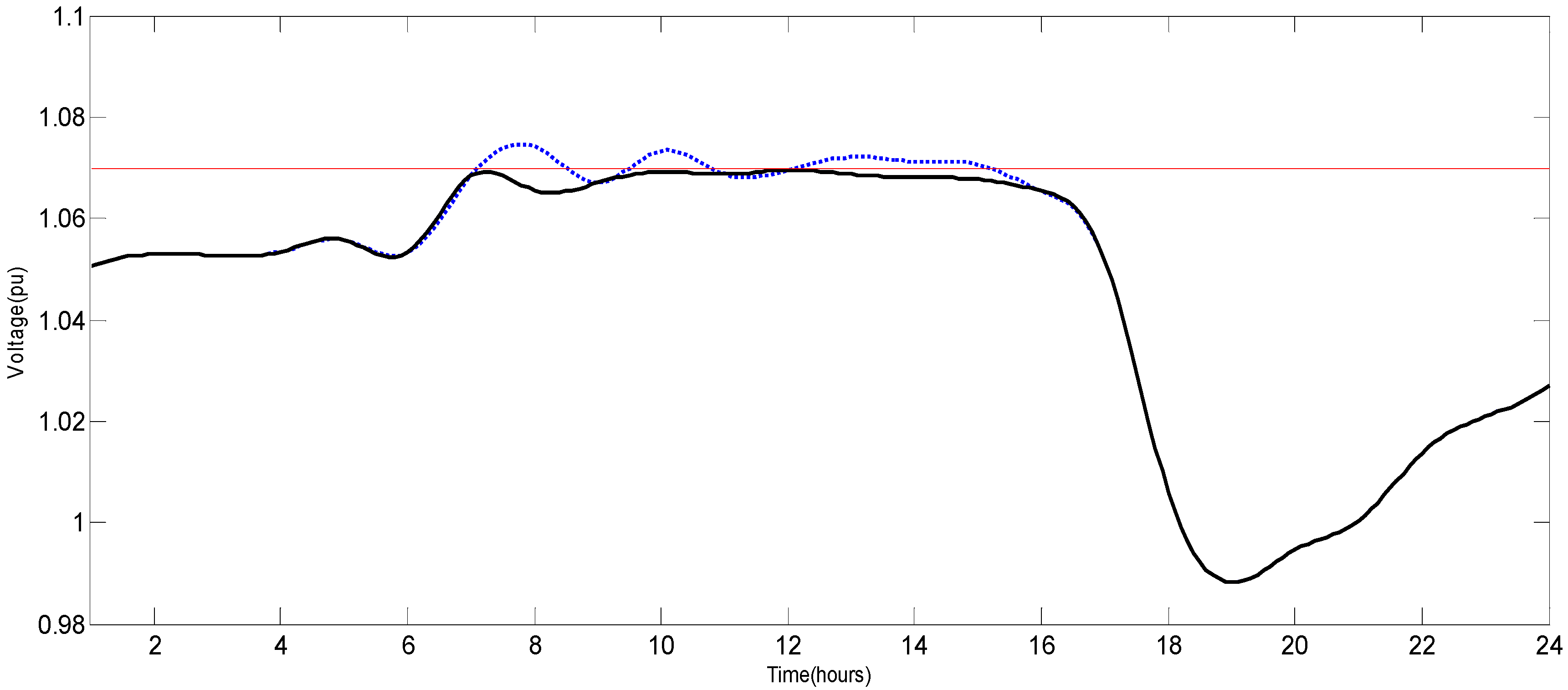
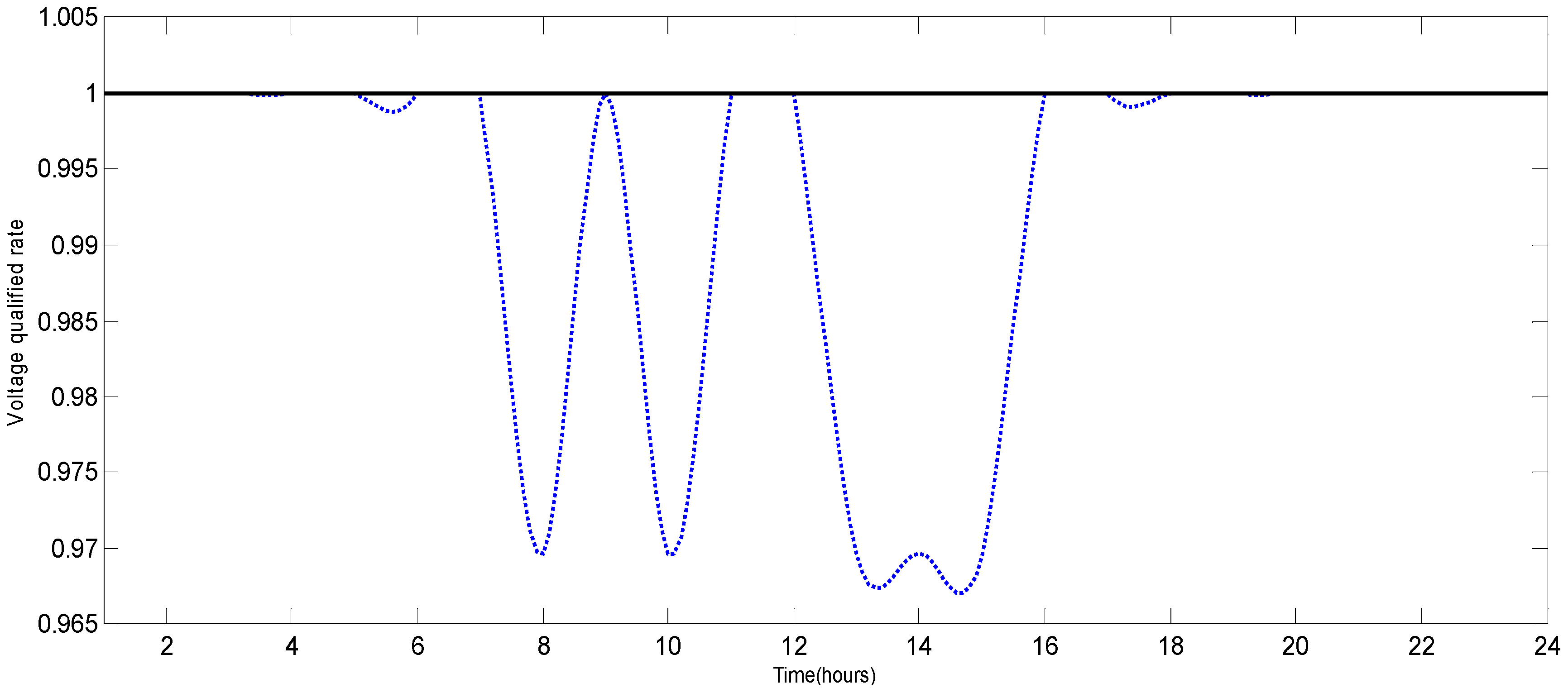
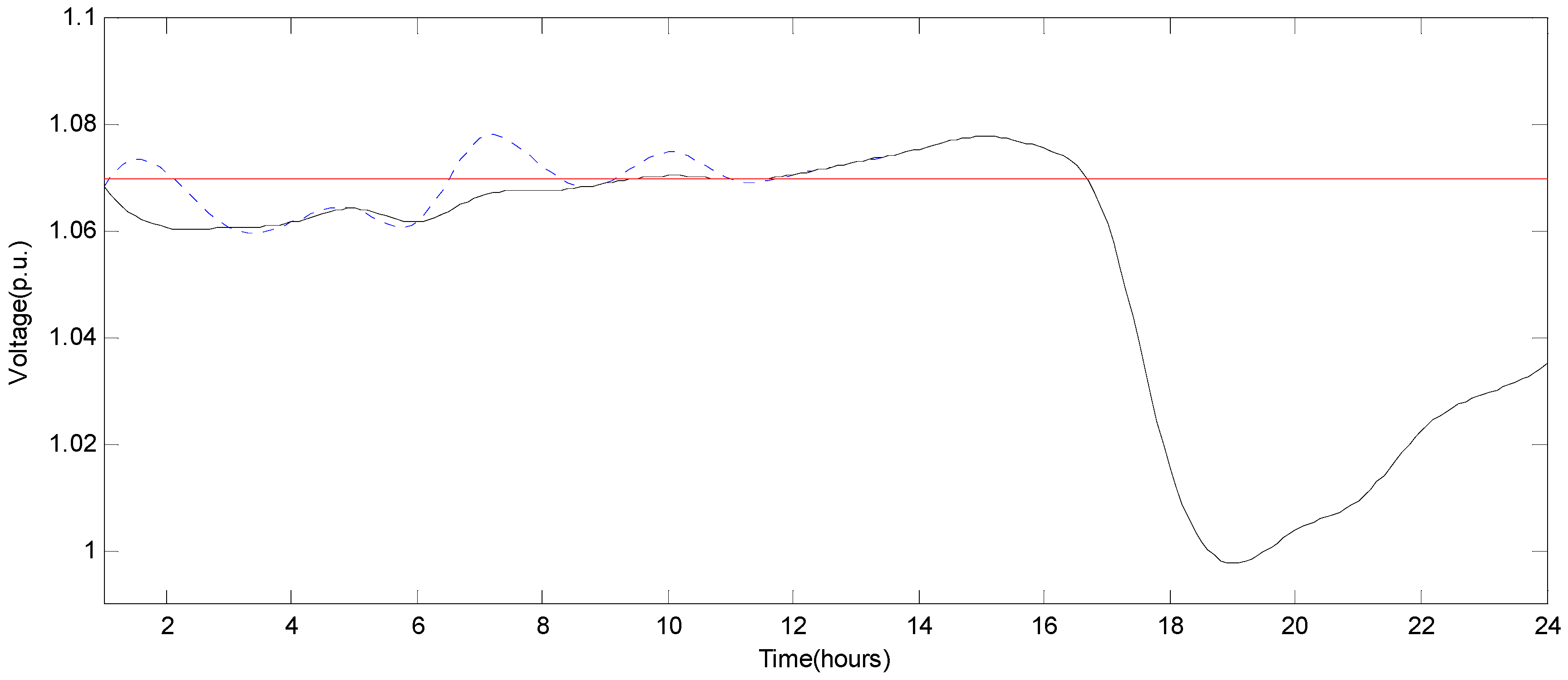
4.4. The Control Effect of Proposed Voltage Control Method
4.5. Relevance between the Capacity of DG and Load, Circuit Structure
5. Conclusions
- (1)
- The cost of control system and its supporting systems are included in the objectives of planning. Therefore, it takes the impacts of control system on the costs of operation and construction into account. The control effect of voltage regulation is included in the simulation. Therefore, the control ability can be verified instead of being estimated roughly. Having made improvements in the above two aspects, the precision of planning can be improved.
- (2)
- Different control systems have different influences on the planning and operation of the grid. Both the decentralized and centralized approaches can reduce voltage rises and increase the acceptable capacities of DG units to a certain degree, and the effect of the latter is better. However, the centralized approach means a great investment in related costs. With the power grid becoming smarter, more automatic and complicated, the cost of these systems will account for a large share of the total cost. If the cost saving is the priority, adopting the decentralized approach is suggested. If the control effect or DG penetration is the priority, adopting the centralized approach is suggested.
- (3)
- The proposed approach allows DNOs to obtain benefits by inducing the comprehensive cost and maximizes the usage of renewable energy. The algorithm of MODE can compute the optimal capacity of DG units.
- (4)
- In the absence of a widespread communication channel, decentralized voltage control method provides an effective solution to mitigate voltage problem. The simulation results show that the proposed voltage control method helps improve voltage to some extent, and DG capacity can be increased by 12.88%.
- (5)
- Compared with the traditional voltage control methods such as the installation of additional reactive power supply, the proposed voltage control from DGs strategy has more potential. Traditionally, it is difficult to determine the optimal location of reactive power controllers because the configuration of the distribution system may be changed in the future. Furthermore, the setting costs for the installation of additional reactive power compensator is not beneficial for power utilities. The case study proves the effectiveness and advantages of the proposed method.
- (6)
- The optimal capacity of DG near the system bus is relatively larger. The optimal capacity of DG near heavy loads and with better load relevance is also relatively larger.
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DG | Distributed Generation |
|---|---|
| MODE | Multi-objective Differential Evolution Algorithm |
| DWG | Distributed wind generation |
| PV | Photovoltaic energy |
| SHP | Small hydropower |
| ADS | Active distribution system |
| power CPS | Cyber physical system for power grid |
| CPS | physical system |
| PFC | Power factor control mode |
| VC | Voltage control mode |
| AVR | Automatic voltage regulator |
| OLTC | On-load tap changer |
| PFC-VC | Power Factor-Voltage Control |
| SCADA | Supervisory Control And Data Acquisition |
| ADMS | Active Distribution Network Management System |
| DE | Differential evolution algorithm |
| Sending Node | Receiving Node | Resistance(Ohm) | Reactance(Ohm) |
|---|---|---|---|
| 1 | 2 | 0.0575 | 0.0293 |
| 2 | 3 | 0.3076 | 0.1567 |
| 3 | 4 | 0.2284 | 0.1163 |
| 4 | 5 | 0.2378 | 0.1211 |
| 5 | 6 | 0.5109 | 0.4411 |
| 6 | 7 | 0.1168 | 0.3861 |
| 7 | 8 | 0.4439 | 0.1467 |
| 8 | 9 | 0.6426 | 0.4617 |
| 9 | 10 | 0.6514 | 0.4617 |
| 10 | 11 | 0.1227 | 0.0406 |
| 11 | 12 | 0.2336 | 0.0772 |
| 12 | 13 | 0.9159 | 0.7206 |
| 13 | 14 | 0.3379 | 0.4448 |
| 14 | 15 | 0.3687 | 0.3282 |
| 15 | 16 | 0.4656 | 0.34 |
| 16 | 17 | 0.8042 | 1.0738 |
| 17 | 18 | 0.4567 | 0.3581 |
| 2 | 19 | 0.1023 | 0.0976 |
| 19 | 20 | 0.9385 | 0.8457 |
| 20 | 21 | 0.2555 | 0.2985 |
| 21 | 22 | 0.4423 | 0.5848 |
| 3 | 23 | 0.2815 | 0.1924 |
| 23 | 24 | 0.5603 | 0.4424 |
| 24 | 25 | 0.5591 | 0.4374 |
| 8 | 26 | 0.1267 | 0.0645 |
| 26 | 27 | 0.1773 | 0.0903 |
| 27 | 28 | 0.6607 | 0.5826 |
| 28 | 29 | 0.5018 | 0.4371 |
| 29 | 30 | 0.3166 | 0.1613 |
| 30 | 31 | 0.6079 | 0.6008 |
| 31 | 32 | 0.1937 | 0.2258 |
| 32 | 33 | 0.2128 | 0.3308 |
| 8 | 21 | 1.25 | 1.25 |
| 9 | 15 | 1.25 | 1.25 |
| 12 | 22 | 1.25 | 1.25 |
| 18 | 33 | 0.3125 | 0.3125 |
| 24 | 29 | 0.3125 | 0.3125 |
| Node | Pd | Qd | Node | Pd | Qd |
|---|---|---|---|---|---|
| 1 | 0 | 0 | 18 | 0.09 | 0.04 |
| 2 | 0.1 | 0.06 | 19 | 0.09 | 0.04 |
| 3 | 0.09 | 0.04 | 20 | 0.09 | 0.04 |
| 4 | 0.12 | 0.08 | 21 | 0.09 | 0.04 |
| 5 | 0.06 | 0.03 | 22 | 0.09 | 0.04 |
| 6 | 0.06 | 0.02 | 23 | 0.09 | 0.05 |
| 7 | 0.2 | 0.1 | 24 | 0.42 | 0.2 |
| 8 | 0.2 | 0.1 | 25 | 0.42 | 0.2 |
| 9 | 0.06 | 0.02 | 26 | 0.06 | 0.025 |
| 10 | 0.02 | 0.02 | 27 | 0.06 | 0.025 |
| 11 | 0.045 | 0.03 | 28 | 0.06 | 0.02 |
| 12 | 0.06 | 0.035 | 29 | 0.12 | 0.07 |
| 13 | 0.06 | 0.035 | 30 | 0.2 | 0.6 |
| 14 | 0.12 | 0.08 | 31 | 0.15 | 0.07 |
| 15 | 0.06 | 0.01 | 32 | 0.21 | 0.1 |
| 16 | 0.06 | 0.02 | 33 | 0.06 | 0.04 |
| 17 | 0.06 | 0.02 |
| Time | V1 | V2 | Time | V1 | V2 |
|---|---|---|---|---|---|
| 1 | 1.053518 | 1.053518 | 13 | 1.070928 | 1.066245 |
| 2 | 1.055882 | 1.055882 | 14 | 1.068655 | 1.068655 |
| 3 | 1.055681 | 1.055681 | 15 | 1.071041 | 1.066649 |
| 4 | 1.056532 | 1.056532 | 16 | 1.064418 | 1.064418 |
| 5 | 1.058954 | 1.058954 | 17 | 1.050835 | 1.050835 |
| 6 | 1.056384 | 1.056384 | 18 | 1.004517 | 1.004517 |
| 7 | 1.07179 | 1.060807 | 19 | 0.986995 | 0.986995 |
| 8 | 1.066167 | 1.066167 | 20 | 0.993605 | 0.993605 |
| 9 | 1.067573 | 1.067573 | 21 | 0.999856 | 0.999856 |
| 10 | 1.07378 | 1.068192 | 22 | 1.013378 | 1.013378 |
| 11 | 1.067592 | 1.067592 | 23 | 1.020895 | 1.020895 |
| 12 | 1.068462 | 1.068462 | 24 | 1.026967 | 1.026967 |
| Time | V1 | V2 | Time | V1 | V2 |
|---|---|---|---|---|---|
| 1 | 1.06836 | 1.06836 | 13 | 1.07311 | 1.07311 |
| 2 | 1.0712 | 1.06084 | 14 | 1.07554 | 1.07554 |
| 3 | 1.06081 | 1.06081 | 15 | 1.07794 | 1.07794 |
| 4 | 1.06176 | 1.06176 | 16 | 1.07561 | 1.07561 |
| 5 | 1.06436 | 1.06436 | 17 | 1.06163 | 1.06163 |
| 6 | 1.06185 | 1.06185 | 18 | 1.01562 | 1.01562 |
| 7 | 1.07746 | 1.06672 | 19 | 0.99767 | 0.99767 |
| 8 | 1.07217 | 1.06776 | 20 | 1.00403 | 1.00403 |
| 9 | 1.06904 | 1.06904 | 21 | 1.00956 | 1.00956 |
| 10 | 1.07503 | 1.07054 | 22 | 1.02263 | 1.02263 |
| 11 | 1.06989 | 1.06989 | 23 | 1.02953 | 1.02953 |
| 12 | 1.07072 | 1.07072 | 24 | 1.03531 | 1.03531 |
References
- Senjyu, T.; Miyazato, Y.; Yona, A.; Urasaki, N.; Funabashi, T. Optimal distribution voltage control and coordination with distributed generation. IEEE Trans. Power Deliv. 2008, 23, 1236–1242. [Google Scholar] [CrossRef]
- Xu, X.; Huang, Y.; Liu, C.; Wang, W.; Wang, Y.L. Influence of Distributed Photovoltaic Generation on Voltage in Distribution Network and Solution of Voltage Beyond Limits. Power Sys. Tech. 2010, 10, 140–146. [Google Scholar]
- NHadjsaid, N.; Canard, J.; Dumas, F. Dispersed generation impact on distribution networks. IEEE Comput. Appl. Power Mag. 1999, 12, 22–28. [Google Scholar] [CrossRef]
- Georgilakis, P.S.; Hatziargyriou, N.D. Optimal distributed generation placement in power distribution networks: Models, methods, and future research. IEEE Trans. Power Syst. 2013, 28, 3420–3428. [Google Scholar] [CrossRef]
- Georgilakis, P.S.; Hatziargyriou, N.D. A review of power distribution planning in the modern power systems era: Models, methods and future research. Elec. Power Syst. Res. 2015, 121, 89–100. [Google Scholar] [CrossRef]
- Kashem, M.A.; Le, A.D.T.; Negnevitsky, M.; Ledwich, G. Distributed generation for minimization of power losses in distribution systems. In Proceedings of the IEEE Power Engineering Society General Meeting, Montreal, QC, Canada, 18–22 June 2006.
- Evangelopoulos, V.A.; Georgilakis, P.S. Optimal distributed generation placement under uncertainties based on point estimate method embedded genetic algorithm. IEE Proc. Generat. Transm. Distrib. 2014, 8, 389–400. [Google Scholar] [CrossRef]
- Jaganathan, S.; Palaniswami, S. Control of voltage profile with optimal control and placement of distributed generation using the refined bacterial foraging algorithm. J. Vib. Contr. 2014, 20, 2006–2018. [Google Scholar] [CrossRef]
- Li, P.; Zhang, L.; Wang, W.; Yang, X.; Zhao, Y. Application and Analysis of Microgrid. Autom. Electr. Power Syst. 2009, 33, 109–114. [Google Scholar]
- Harrison, G.P.; Wallace, A.R. Optimal power flow evaluation of distribution network capacity for the connection of distributed generation. IEE Proc. Generat. Transm. Distrib. 2005, 152, 115–122. [Google Scholar] [CrossRef]
- Borges, C.L.T.; Martins, V.F. Multistage expansion planning for active distribution networks under demand and distributed generation uncertainties. Int. J. Electr. Power Energ. Syst. 2012, 36, 107–116. [Google Scholar] [CrossRef]
- Zhang, W.; Li, F.; Tolbert, L.M. Review of reactive power planning: Objectives, constraints, and algorithm. IEEE Trans. Power Deliv. 2007, 22, 2177–2186. [Google Scholar] [CrossRef]
- Sridhar, S.; Hahn, A.; Govindarasu, M. Cyber–physical system security for the electric power grid. Pro. IEEE 2012, 100, 210–224. [Google Scholar] [CrossRef]
- Raz, D.; Shavitt, Y. Active networks for efficient distributed network management. IEEE Comm. Mag. 2000, 38, 138–143. [Google Scholar] [CrossRef]
- Puttgen, H.B.; MacGregor, P.R.; Lambert, F.C. Distributed generation: semantic hype or the dawn of a new era. IEEE Power Energy Mag. 2003, 1, 22–29. [Google Scholar] [CrossRef]
- Dugan, R.C.; McGranaghan, M.F.; Beaty, H.W. Electrical Power Systems Quality; McGraw-Hill: New York, NY, USA, 1996. [Google Scholar]
- Hashim, T.J.T.; Mohamed, A.; Shareef, H. A review on voltage control methods for active distribution networks. Electr. Rev. 2012, 88, 304–312. [Google Scholar]
- Conti, S.; Greco, A.M. Active MV distribution network planning coordinated with advanced centralized voltage regulation system. In Proceedings of the 2007 IEEE Lausanne Powertech, Lausanne, Switzerland, 1–5 July 2007.
- Sansawatt, T.; O’Donnell, J.; Ochoa, L.F.; Harrison, G.P. Decentralised voltage control for active distribution networks. In Proceedings of the Universities Power Engineering Conference (UPEC), 2009 Proceedings of the 44th International, Glasgow, UK, 1–4 September 2009.
- Ochoa, L.F.; Harrison, G.P. Minimizing energy losses: Optimal accommodation and smart operation of renewable distributed generation. IEEE Trans. Power Syst. 2011, 26, 198–205. [Google Scholar] [CrossRef]
- Unger, D.; Spitalny, L.; Myrzik, J.M.A. Voltage control by small hydro power plants integrated into a virtual power plant. In Proceedings of the 2012 IEEE Energytech, Cleveland, OI, USA, 29–31 May 2012.
- Golshan, M.E.H.; Arefifar, S.A. Optimal allocation of distributed generation and reactive sources considering tap positions of voltage regulators as control variables. Eur. Trans. Electr. Power 2007, 17, 219–239. [Google Scholar] [CrossRef]
- Farag, H.E.Z.; El-Saadany, E.F. A novel cooperative protocol for distributed voltage control in active distribution systems. IEEE Trans. Power Syst. 2013, 28, 1645–1656. [Google Scholar] [CrossRef]
- Vovos, P.N.; Kiprakis, A.E.; Wallace, A.R.; Harrison, G.P. Centralized and distributed voltage control: Impact on distributed generation penetration. IEEE Trans. Power Syst. 2007, 22, 476–483. [Google Scholar] [CrossRef]
- Kiprakis, A.E.; Wallace, A.R. Maximising energy capture from distributed generators in weak networks. IEE Proc. C Generat. Transm. Distrib. 2004, 151, 611–618. [Google Scholar] [CrossRef]
- Eberly, T.W.; Schaefer, R.C. Voltage versus VAr/power-factor regulation on synchronous generators. IEEE Trans. Ind. Appl. 2002, 38, 1682–1687. [Google Scholar] [CrossRef]
- Jin, Y.X.; Cheng, H.Z.; Yan, J.Y.; Zhang, L. New discrete method for particle swarm optimization and its application in transmission network expansion planning. Elec. Power Syst. Res. 2007, 77, 227–233. [Google Scholar] [CrossRef]
- Liu, W.; Li, Y.; Li, H.; Zhao, T.; Zhang, J. Wind power accommodation capability considering economic constraints for western mountain areas. Electr. Power Auto. Equip. 2014, 34, 19–24. (In Chinese) [Google Scholar]
- Smith, T.C.; Lyshevski, S.E. Clean high-energy density renewable power generation systems with soft-switching sliding mode control laws. In Proceedings of the Decision and Control and European Control Conference (CDC-ECC), 2011 50th IEEE Conference, Orlando, FL, USA, 12–15 December 2011.
- Zhou, Y.; Li, X.; Gao, L. A differential evolution algorithm with intersect mutation operator. Appl. Soft Comput. 2013, 13, 390–401. [Google Scholar] [CrossRef]
- Dharageshwari, K.; Nayanatara, C. Multiobjective optimal placement of multiple distributed generations in IEEE 33 bus radial system using simulated annealing. In Proceedings of the 2015 International Conference on Circuit, Power and Computing Technologies (ICCPCT), CEBU, Philippines, 27–28 March 2015.
- Wijesinghe, A.; Lai, L.L. Small hydro power plant analysis and development. In Proceedings of the 2011 4th International Conference on Electric Utility Deregulation and Restructuring and Power Technologies (DRPT), Weihai, China, 6–9 July 2011.
- Xu, Y.; Zhao, L. A fast multi-objective differential evolutionary algorithm based on sorting of non-dominated solutions. In Proceedings of the 2015 IEEE 14th International Conference on Cognitive Informatics & Cognitive Computing (ICCI*CC), Beijing, China, 6–8 July 2015.
- Laodee, P.; Ketjoy, N. A small hydro-power electricity generation system in Thailand. In Proceedings of the 8th IET International Conference on Advances in Power System Control, Operation and Management (APSCOM), London, UK, 8–11 November 2009.
- Peng, Z.; Wang, X.; Peng, X.; Pan, G. Stochastic Modeling of Small Hydropower Generation Based on Reginonal Synchronism Feature and Its Allowed Penetration Level Evaluation. Water Resour. Power 2015, 33, 171–175. (In Chinese) [Google Scholar]
- Borges, C.L.T.; Pinto, R.J. Small hydro power plants energy availability modeling for generation reliability evaluation. IEEE Trans. Power Syst. 2008, 23, 1125–1135. [Google Scholar] [CrossRef]
- Zeng, B.; Liu, N.; Zhang, Y.; Yang, X.; Zhang, J.; Liu, W. Bi-level Scenario Programming of Active Distribution Network for Promoting Intermittent Distributed Generation Utilization. Trans. China Electrotech. Soc. 2013, 28, 155–163. (In Chinese) [Google Scholar]
- Calderaro, V.; Conio, G.; Galdi, V.; Massa, G.; Piccolo, A. Optimal decentralized voltage control for distribution systems with inverter-based distributed generators. IEEE Trans. Power Syst. 2014, 29, 230–241. [Google Scholar] [CrossRef]
- Dudash, A.; Melvin, W.A., Jr.; Vercellotti, L.C. Distribution Network Communication System Having Branch Connected Repeaters; IFI CLAIMS Patent Services: New Haven, CT, USA, 1981. [Google Scholar]









| Time | Loss (MWh) | Time | Loss (MWh) | Time | Loss (MWh) | Time | Loss (MWh) |
|---|---|---|---|---|---|---|---|
| 1 | 0.099 | 7 | 0.184 | 13 | 0.285 | 19 | 0.159 |
| 2 | 0.107 | 8 | 0.210 | 14 | 0.306 | 20 | 0.145 |
| 3 | 0.114 | 9 | 0.225 | 15 | 0.327 | 21 | 0.114 |
| 4 | 0.120 | 10 | 0.260 | 16 | 0.311 | 22 | 0.103 |
| 5 | 0.135 | 11 | 0.263 | 17 | 0.237 | 23 | 0.091 |
| 6 | 0.133 | 12 | 0.269 | 18 | 0.181 | 24 | 0.091 |
| No. | Equipment Type | Equipment | Unit | Unit Prices |
|---|---|---|---|---|
| 1 | Connection fiber | Fiber and auxiliary devices | km | 20 |
| 2 | Fiber communication | EPON-OLT | set | 150 |
| 3 | EPON-ONU | set | 7 | |
| 4 | Public wireless communication | GPRS Terminal | set | 3 |
| 5 | Network management | Network management equipment | set | 2000 |
| 6 | Construction control cost | Include project management cost, investigation and design fee, etc. | 2000 | |
| The Optimal Scheme | Decentralized Voltage Control | Centralized Voltage Control | |
|---|---|---|---|
| Total capacity of SHPs (MW) | 7.8261 | 7.8261 | |
| Construction cost (k RMB) | Newly-built lines fee | 39,000 | 39,000 |
| Construction cost of Voltage control system | 500 | 5800 | |
| Construction cost of communication system | 0 | 50,000 | |
| Operation cost (k RMB) | 1425.3 | 1253.5 | |
| Comprehensive cost (k RMB) | 40,925.3 | 96,053.5 | |
| Comparisons | With Voltage Control | Without Voltage Control |
|---|---|---|
| Optimal capacity (MW) | 7.8261 | 6.397 |
| Clean energy generation ratio | 4.451 | 3.6424 |
| Network losses rate (%) | 3.29 | 2.16 |
| Voltage (voltage qualified rate) | Acceptable (100%) | Unacceptable (83.33%) |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, W.; Xu, H.; Niu, S.; Xie, J. Optimal Distributed Generator Allocation Method Considering Voltage Control Cost. Sustainability 2016, 8, 193. https://doi.org/10.3390/su8020193
Liu W, Xu H, Niu S, Xie J. Optimal Distributed Generator Allocation Method Considering Voltage Control Cost. Sustainability. 2016; 8(2):193. https://doi.org/10.3390/su8020193
Chicago/Turabian StyleLiu, Wenxia, Huiting Xu, Shuya Niu, and Jiang Xie. 2016. "Optimal Distributed Generator Allocation Method Considering Voltage Control Cost" Sustainability 8, no. 2: 193. https://doi.org/10.3390/su8020193
APA StyleLiu, W., Xu, H., Niu, S., & Xie, J. (2016). Optimal Distributed Generator Allocation Method Considering Voltage Control Cost. Sustainability, 8(2), 193. https://doi.org/10.3390/su8020193