
Virtual Inertia Control-Based Model Predictive Control for Microgrid Frequency Stabilization Considering High Renewable Energy Integration



Abstract
:1. Introduction
2. System Overview and Modeling
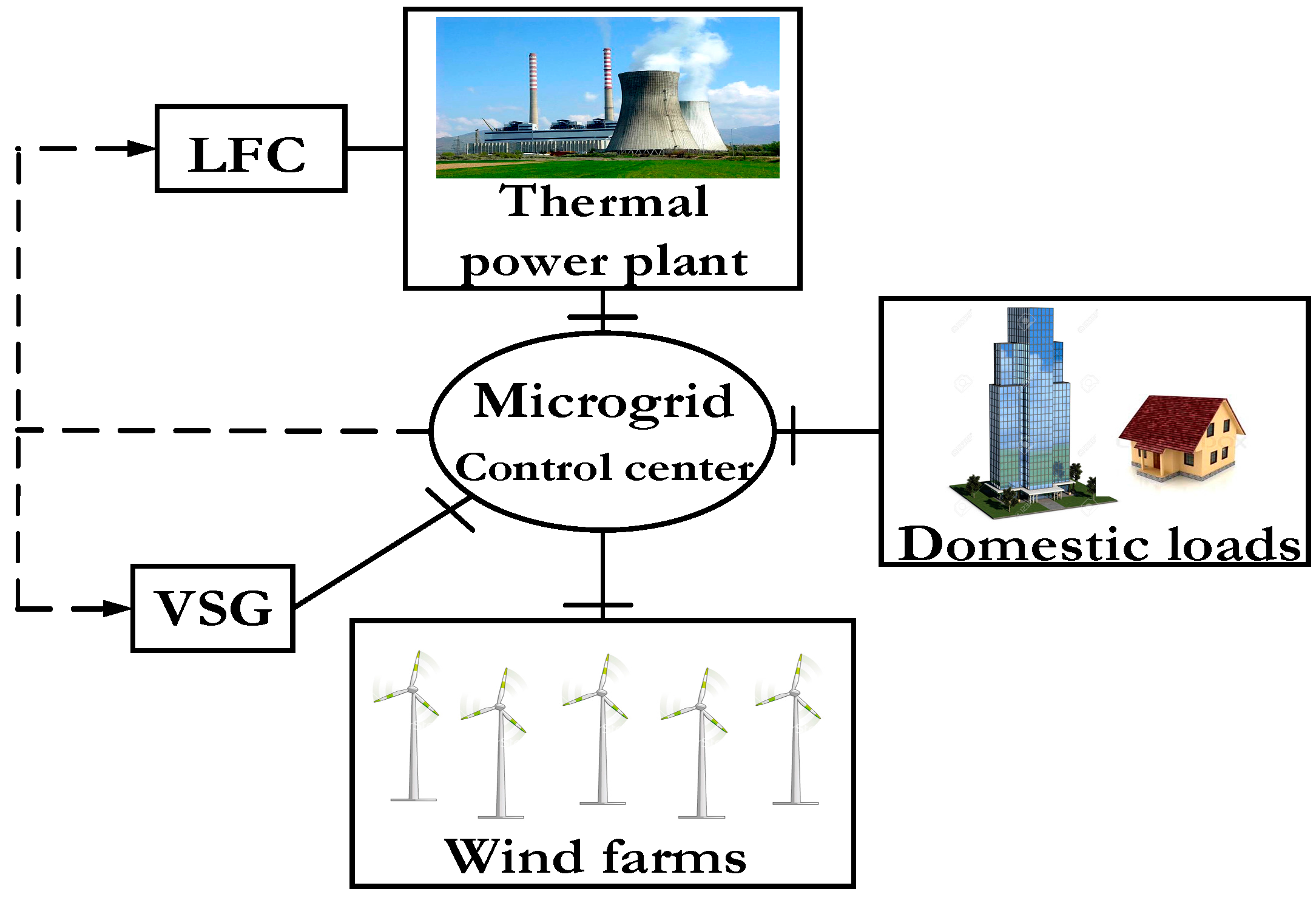
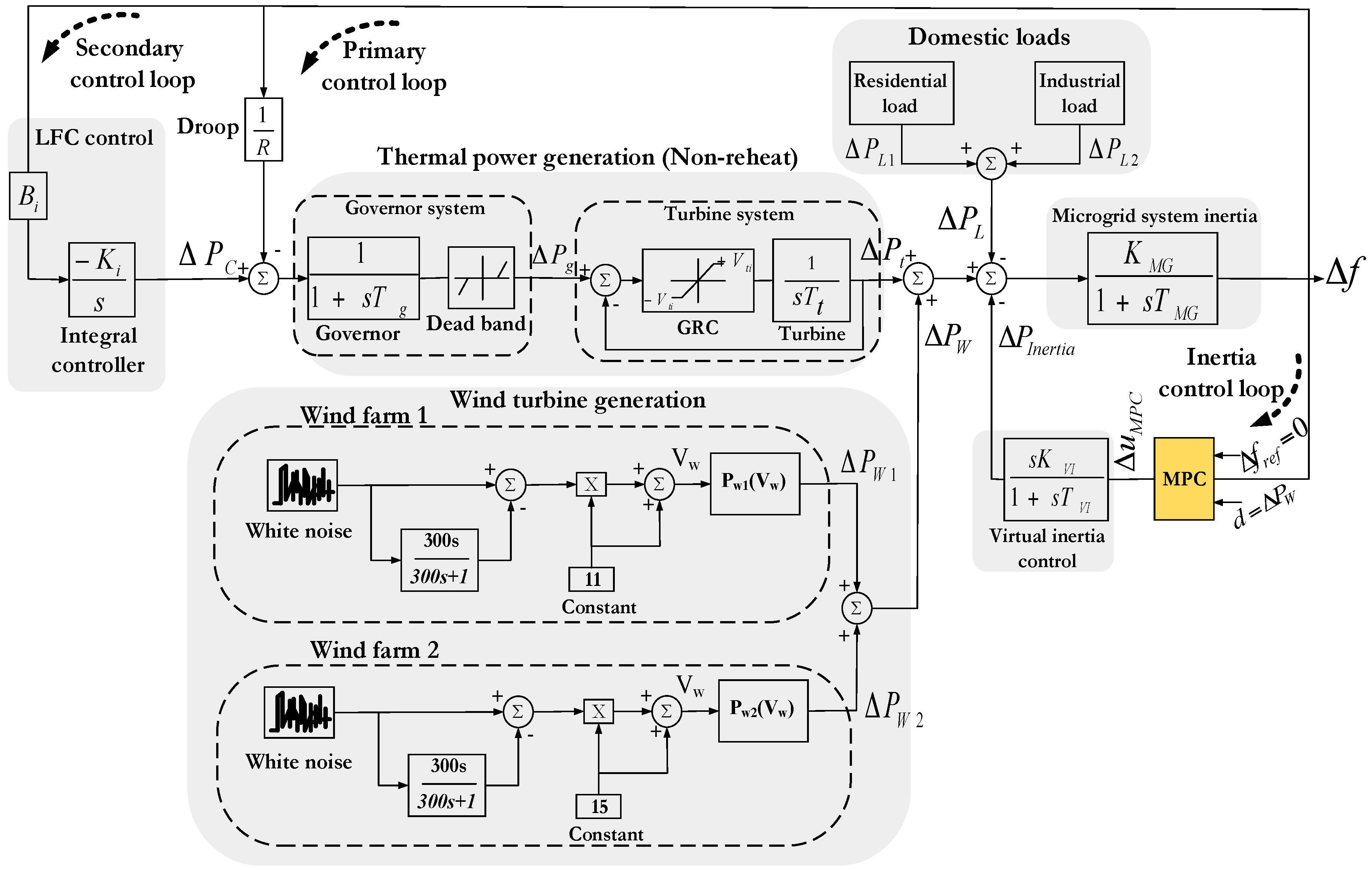
2.1. Microgrid System
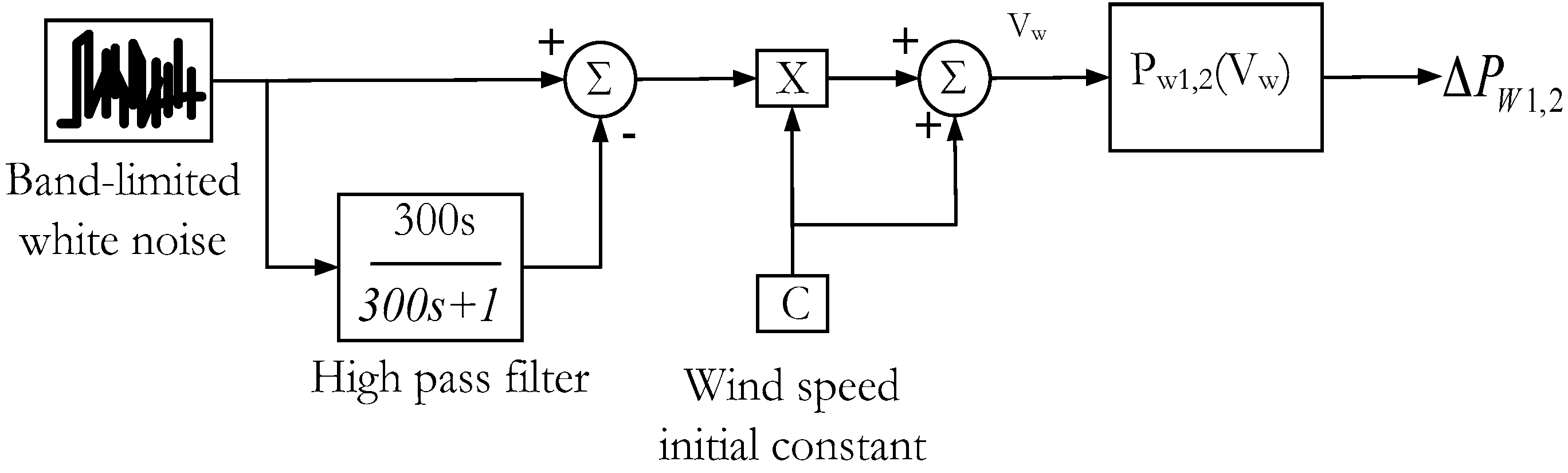
2.2. Wind Turbine Generation
2.3. Frequency Control Based on Inertia Response
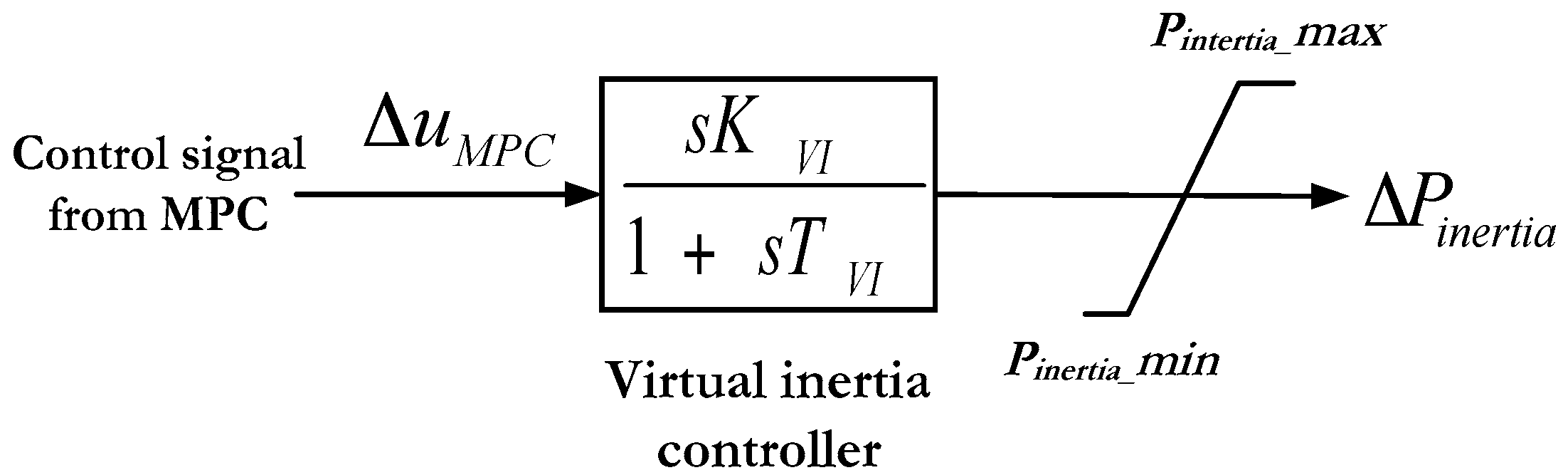
2.4. Virtual Inertia Control for Microgrids
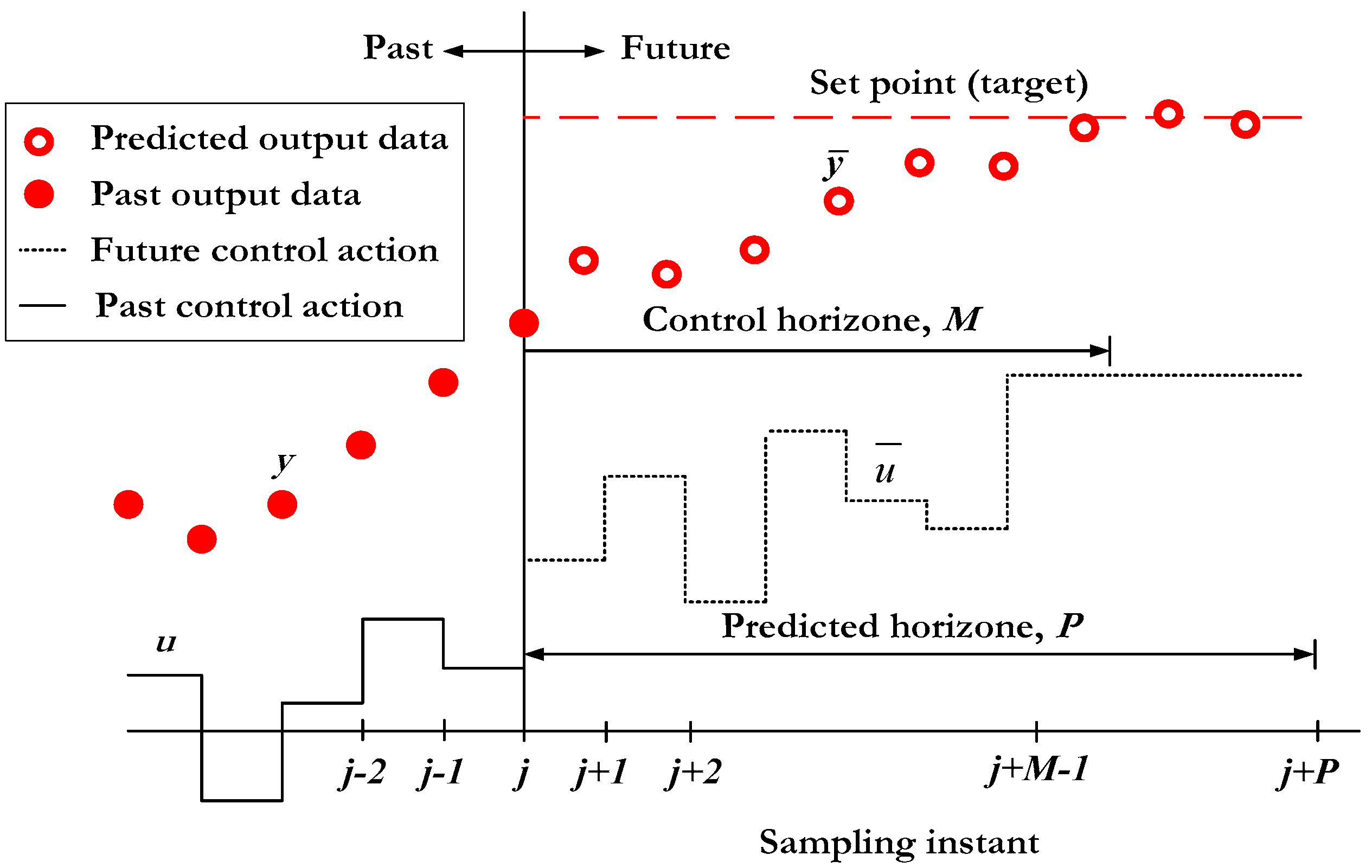
3. Model Predictive Control Design
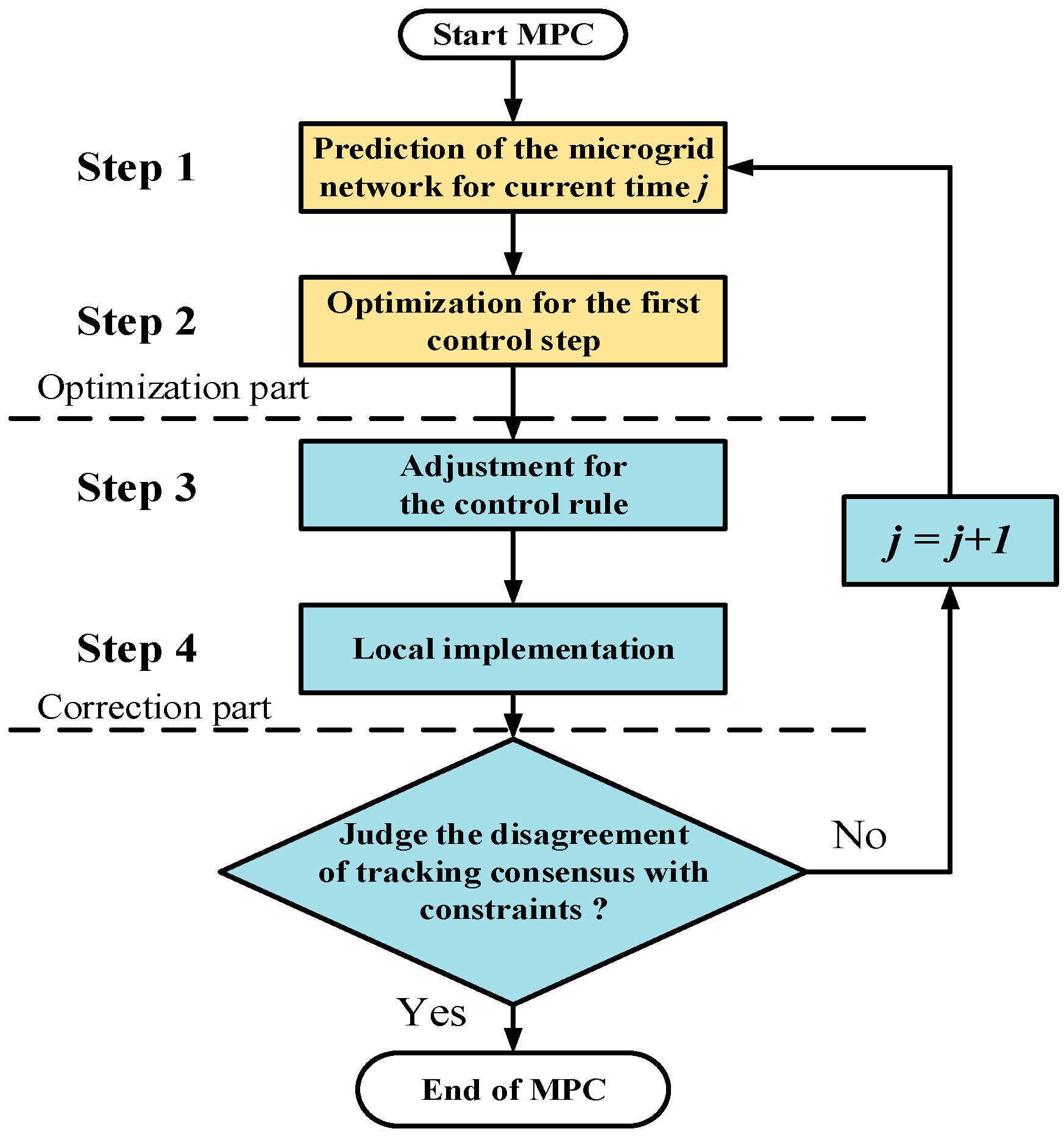
MPC for Virtual Inertia Control
- Step 1:
- MPC agents monitor the corresponding information, and establish the virtual inertia model based MPC in form of Equation (13) over the current time j.
- Step 2:
- The optimization process for the first control step is performed using Equation (15).
- Step 3:
- The first control step ∆Pinertia(j) is extracted and implemented on the virtual inertia controller.
- Step 4:
- Determining whether the termination occurs depends on the disagreement of the tracking consensus within the constraints. If not, the optimization process is repeated for the next time j + 1.
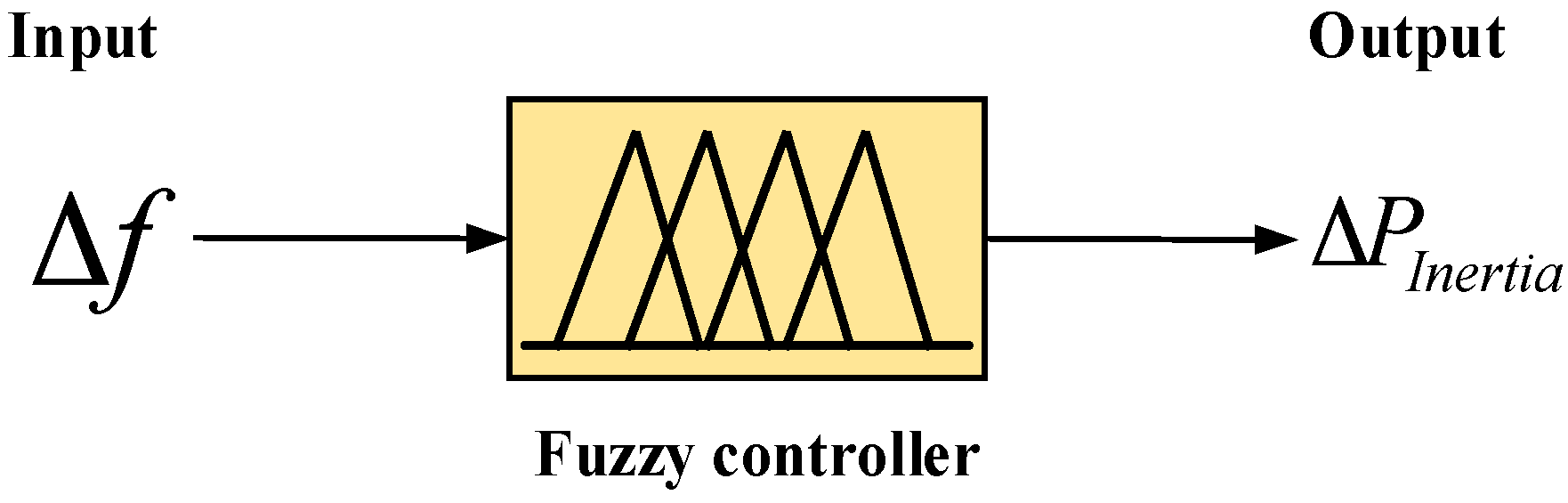
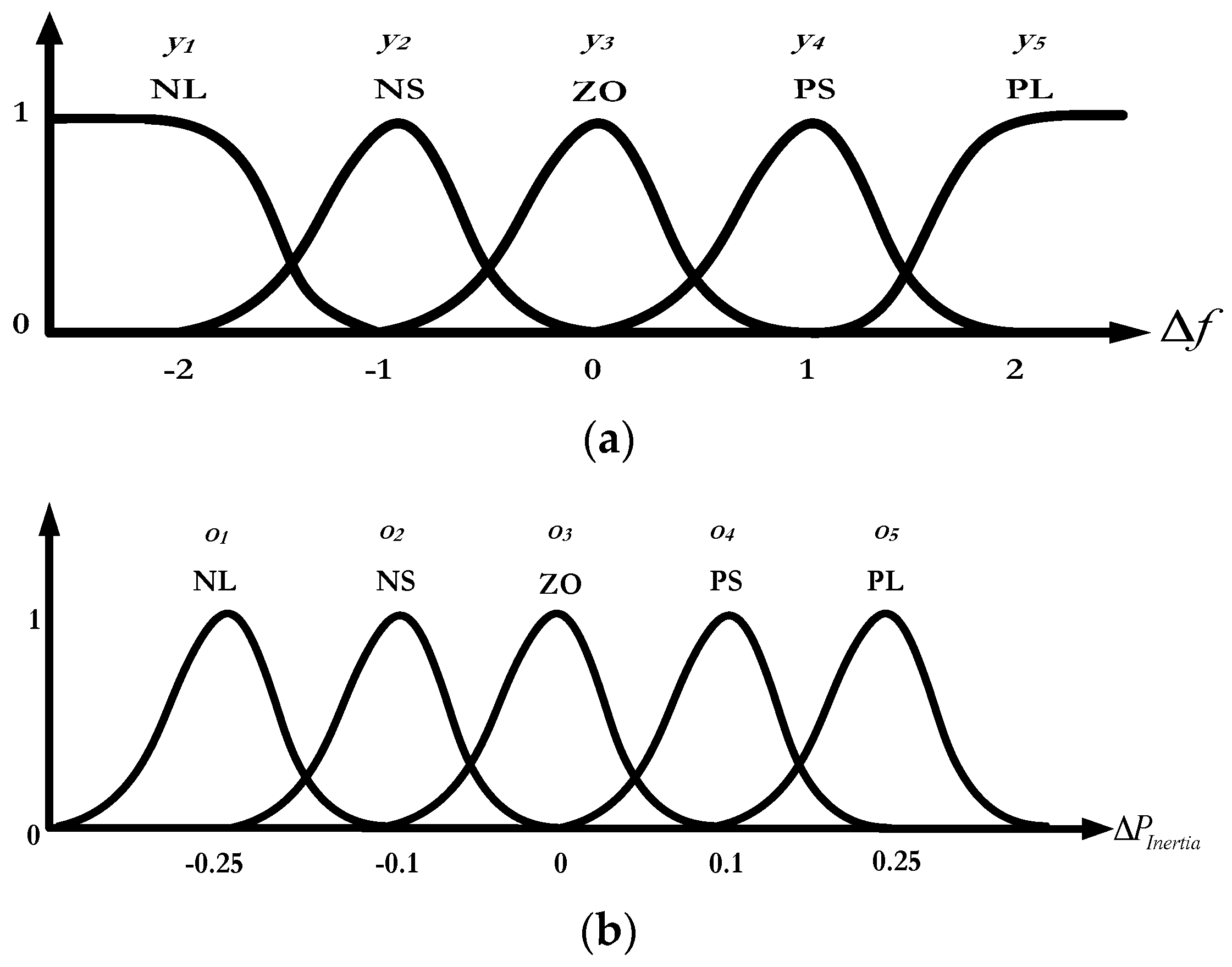
4. Fuzzy Logic System for Virtual Inertia Control (Comparative Method)
5. Simulation Results and Discussions
- Prediction horizon = 15
- Control horizon = 2
- Weights on the manipulated variables = 0
- Weights on the manipulated variable rates = 0.1
- Weights on the output signals = 3
- Sampling inertial = 0.01 s
- Maximum control action = 0.25 pu
- Minimum control action = −0.25 pu
- Maximum frequency deviation = 1 pu
- Minimum frequency deviation = −1 pu
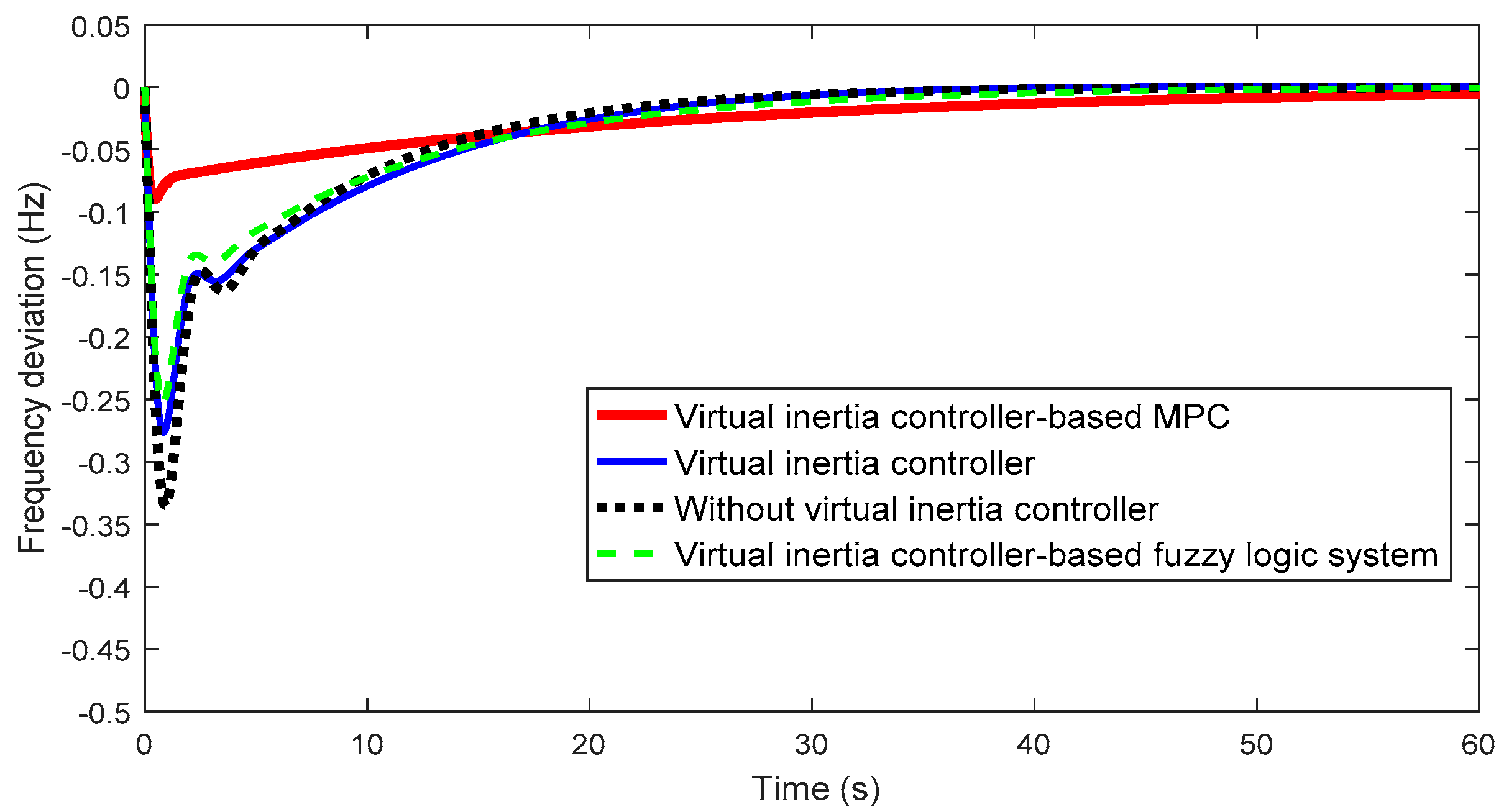
5.1. Scenario 1 (With Sudden Load Change)
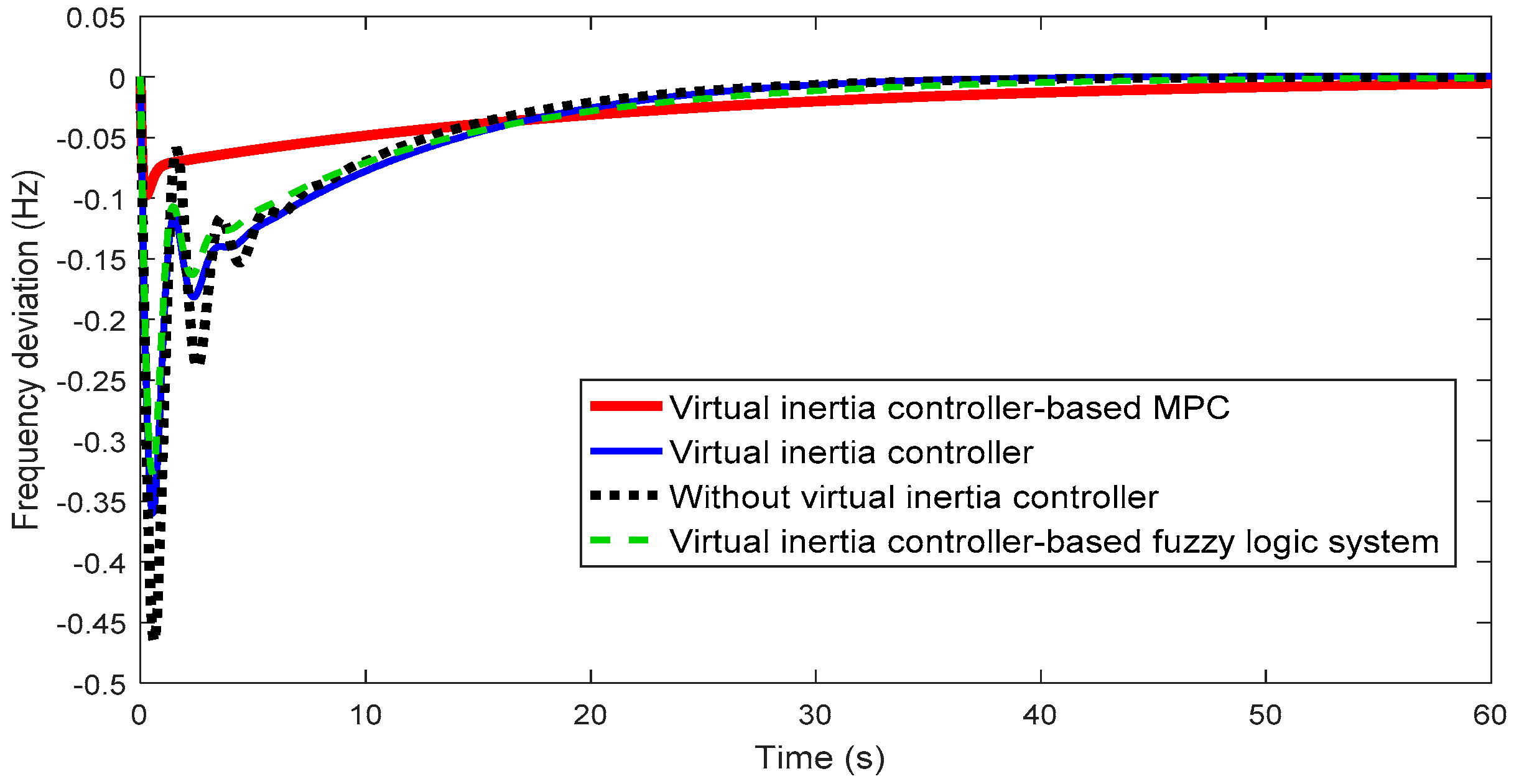
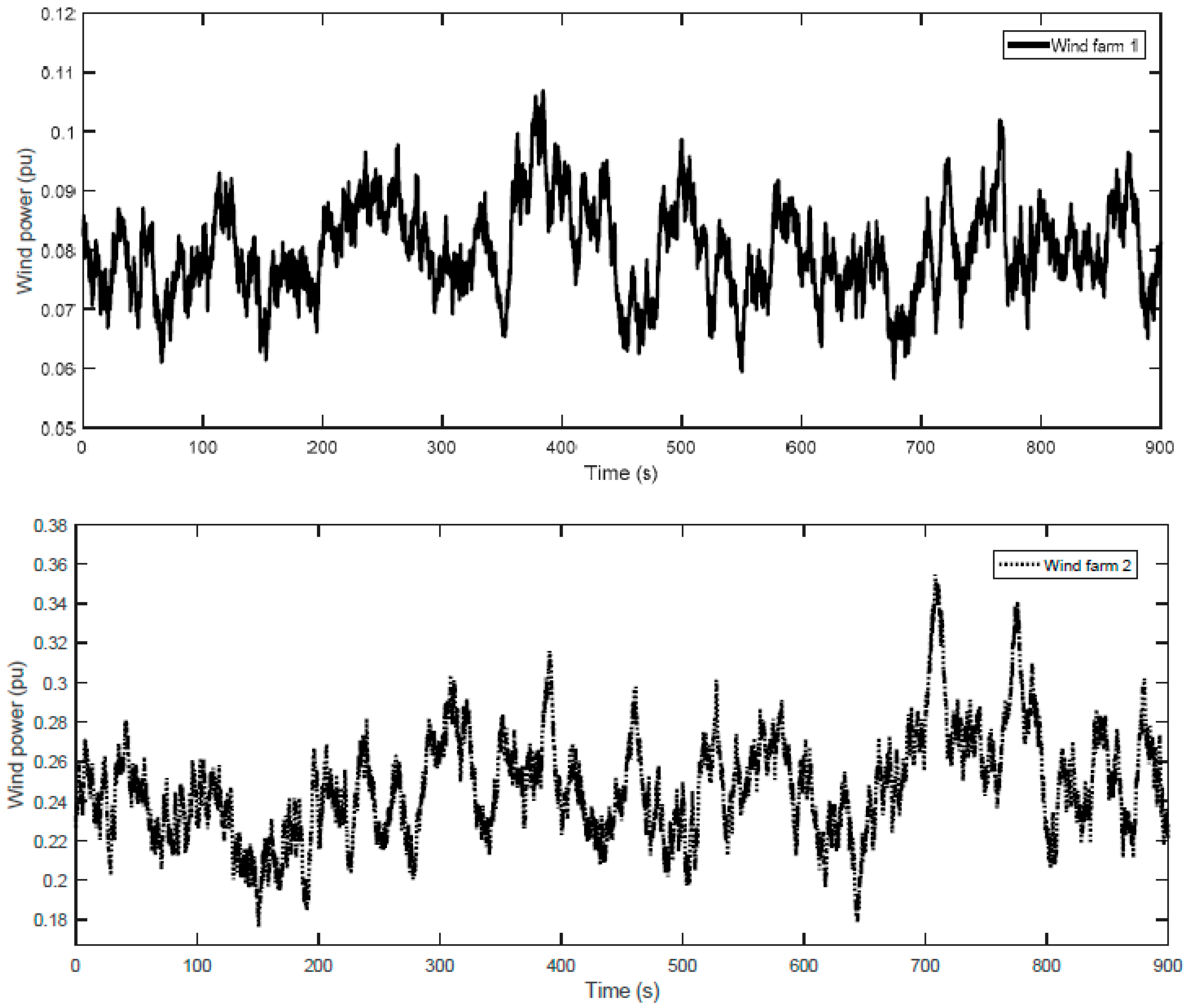
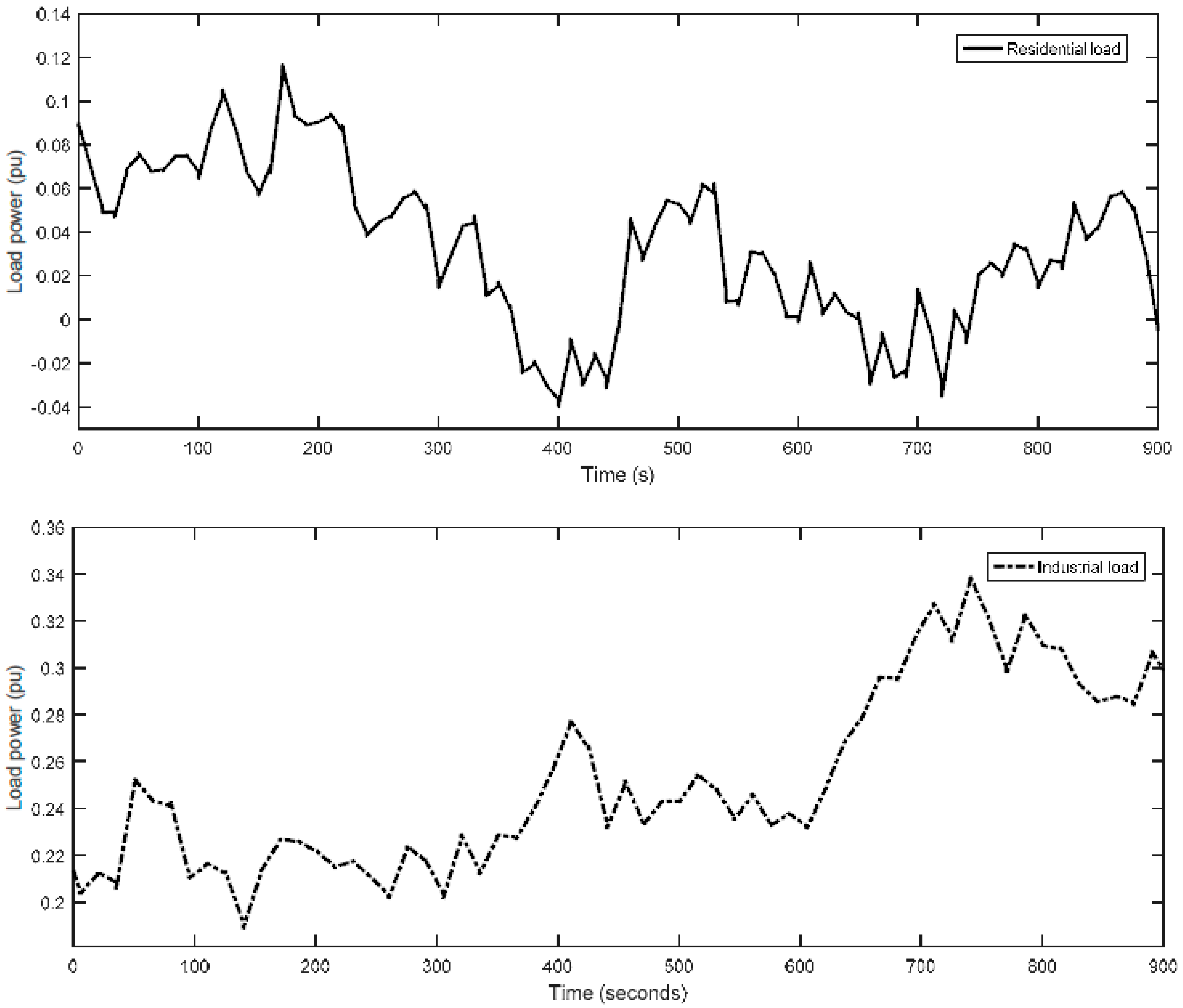
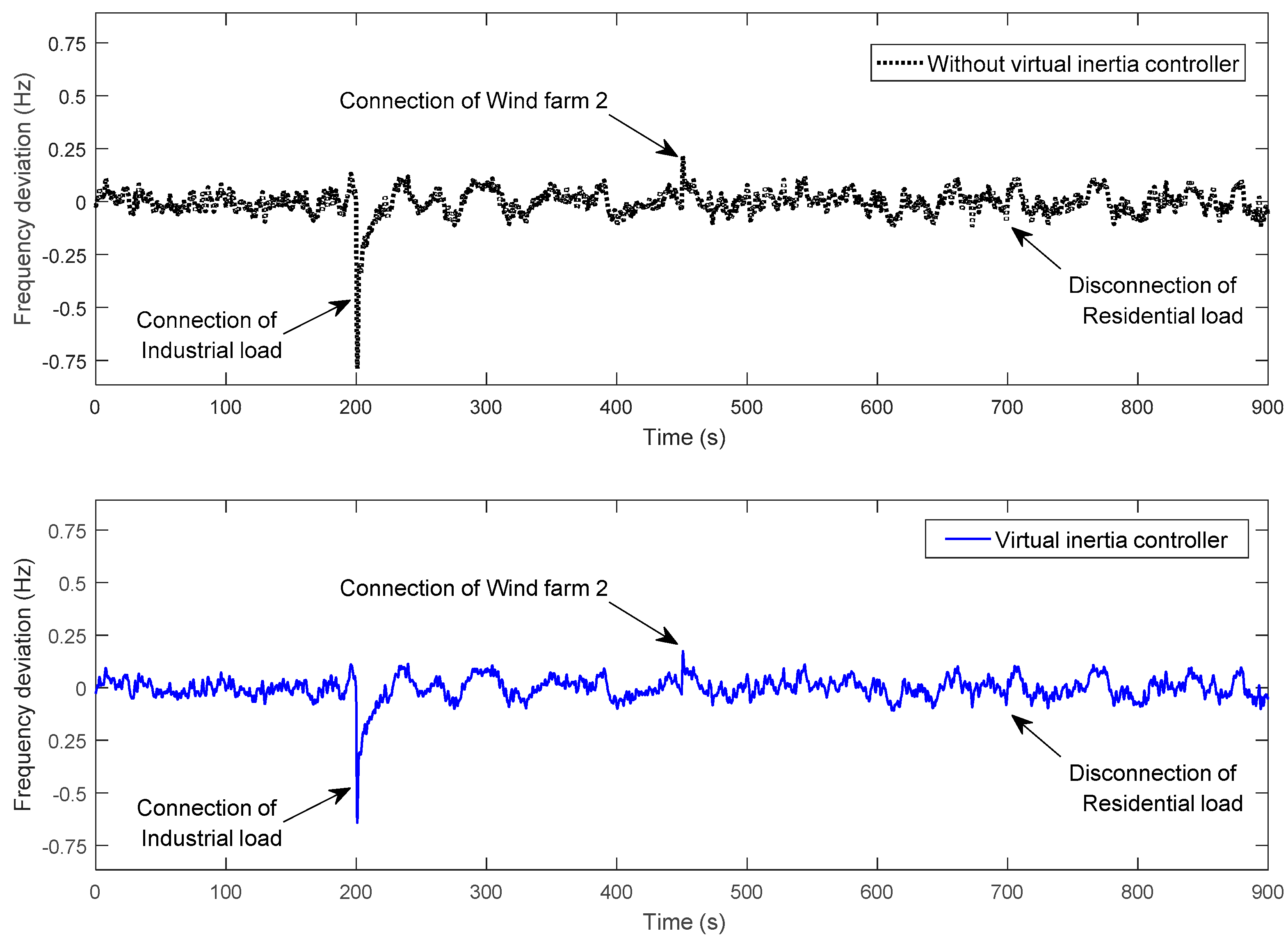
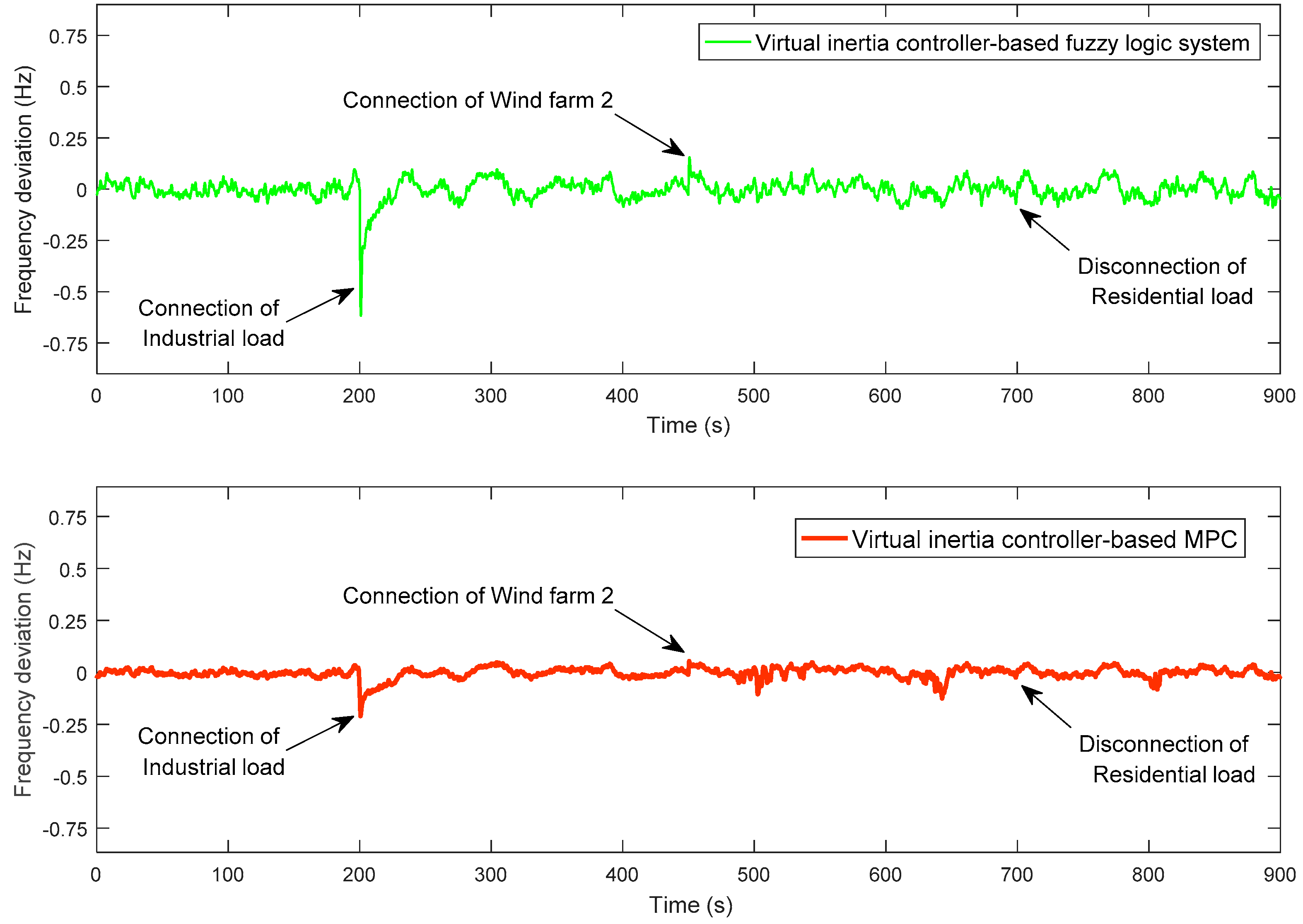
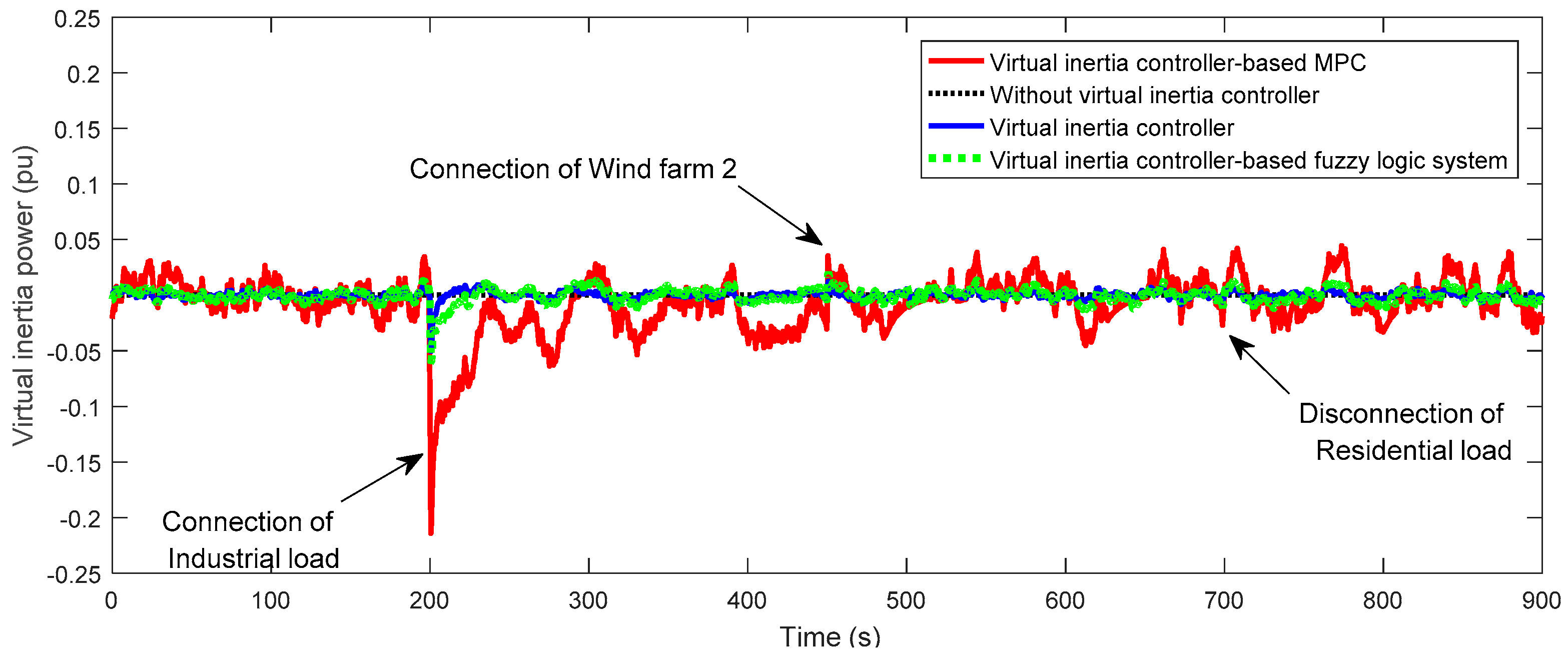
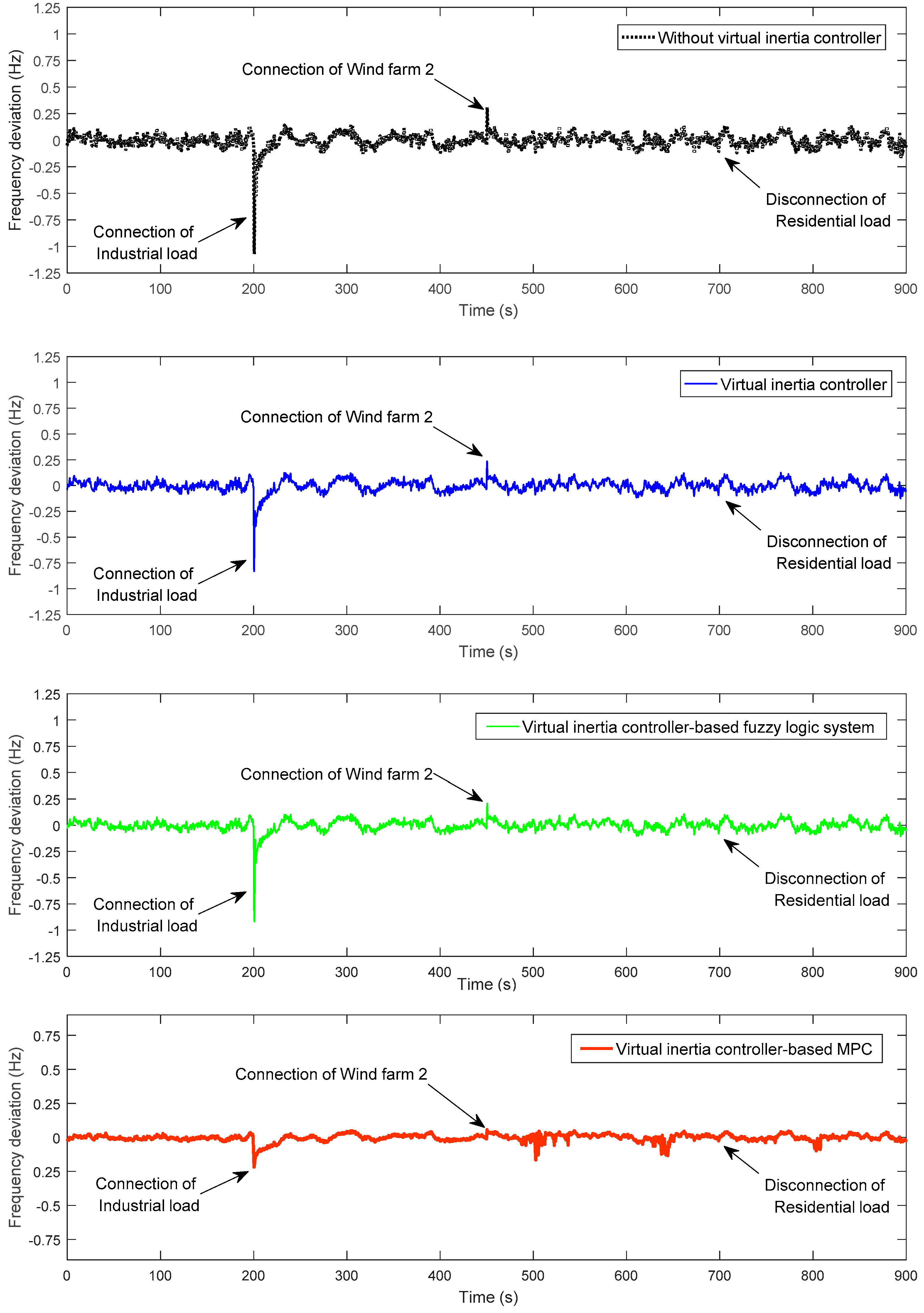
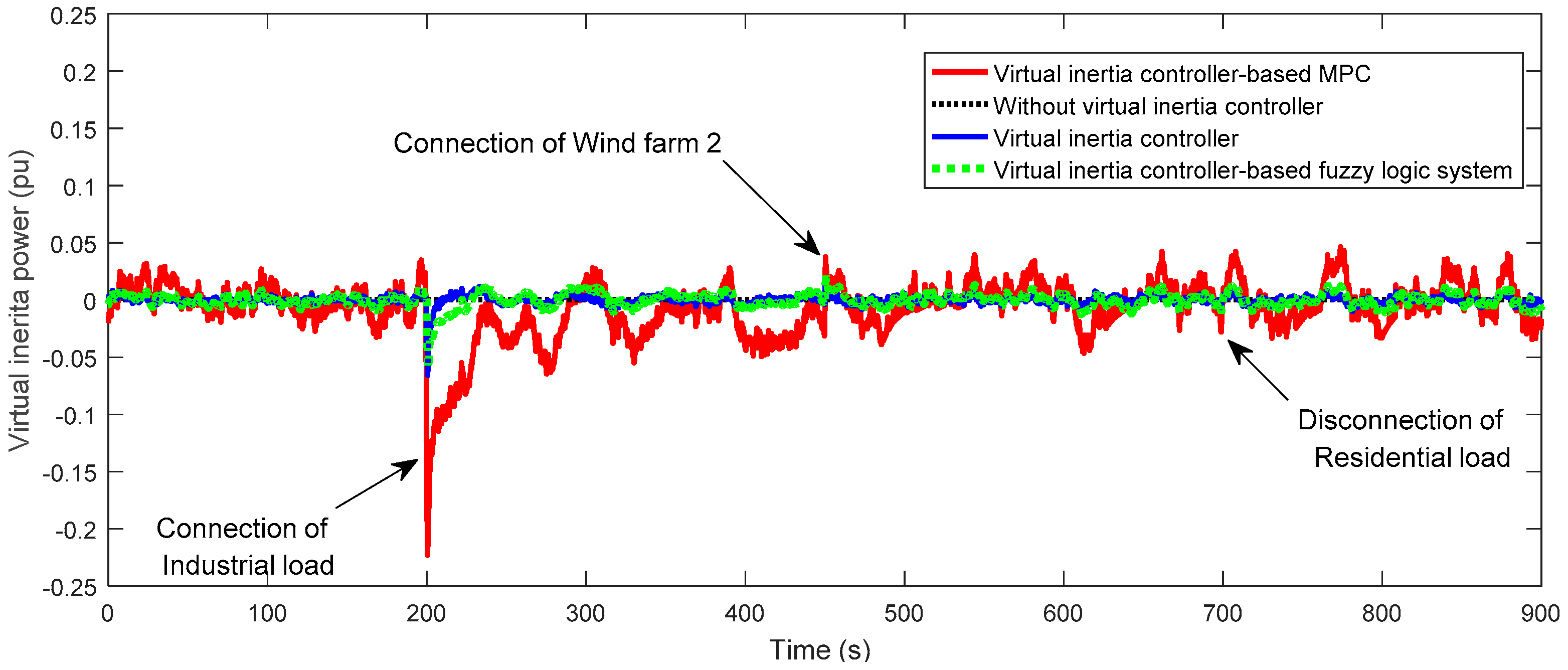
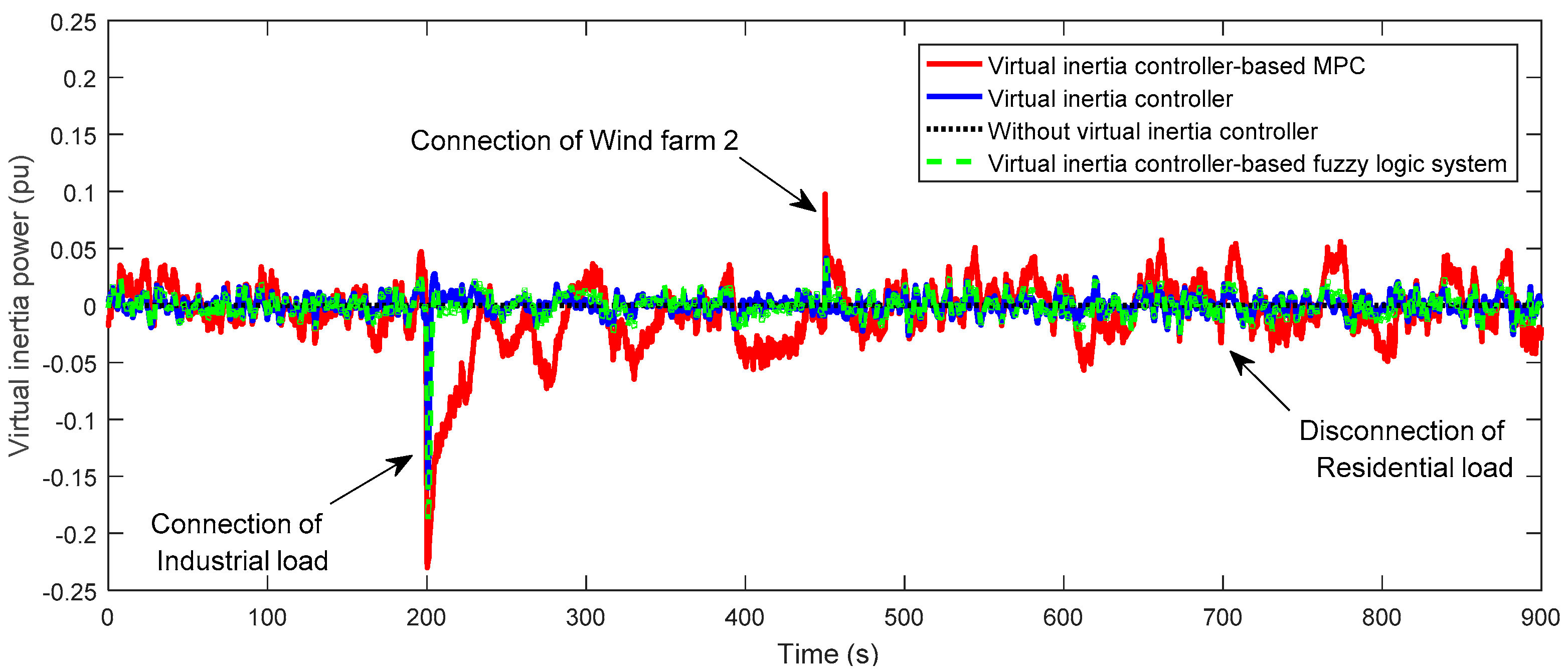
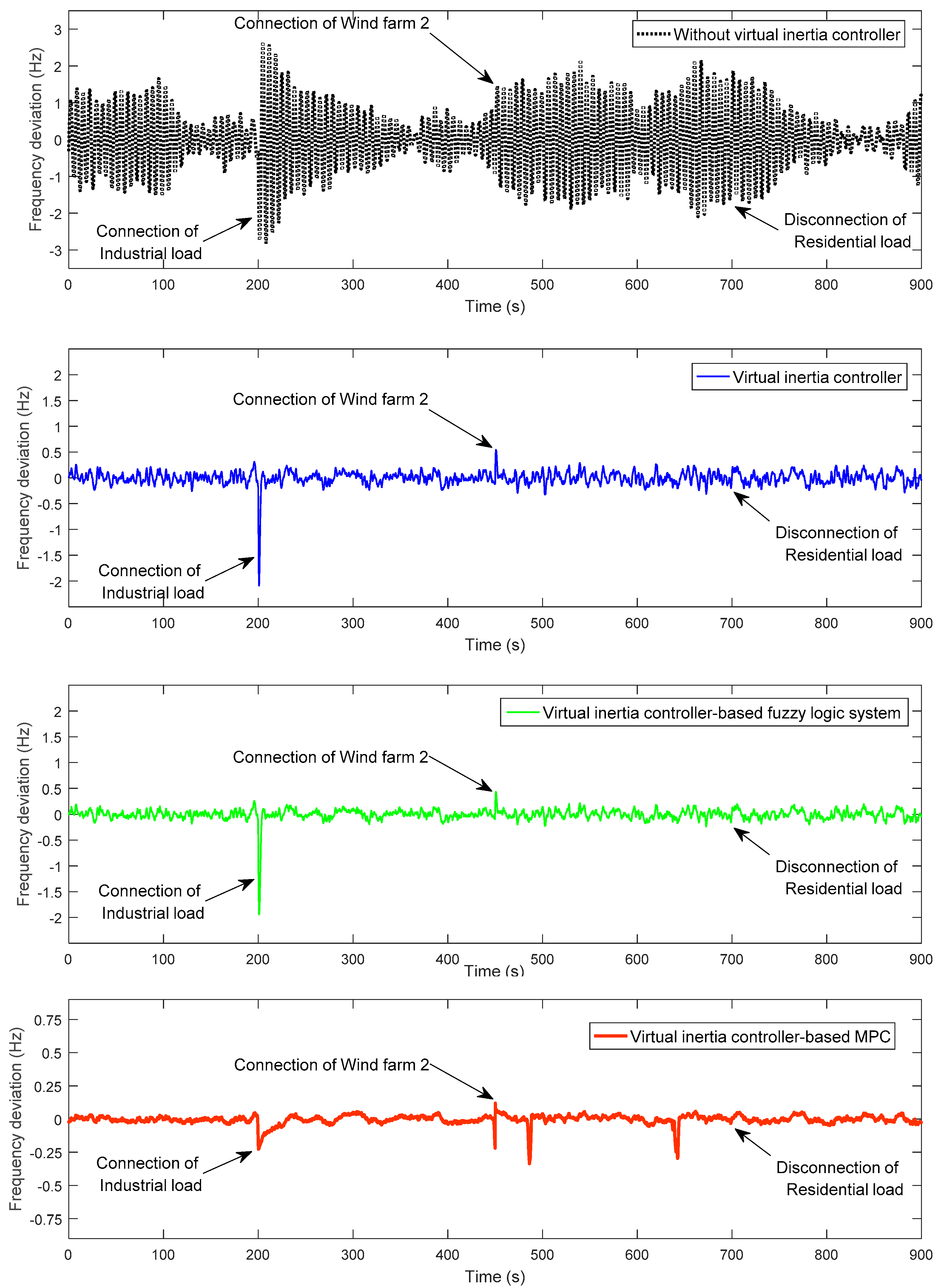
5.2. Scenario 2 (With High Integrations of Wind Energy and Load Disturbances)
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| Vw | the wind speed (m/s) |
| d | the air density (kg/m3) |
| A | the cross section of the rotor for wind turbine (m2) |
| Cp | the power coefficient |
| J | the moment of the system inertia (kg/m2) |
| ω | the rotor speed (rad/s) |
| Tm and Te | the mechanical and electrical torque, respectively |
| Pm and Pe | the mechanical and electrical power, respectively |
| S | the rated apparent power (VA) |
| y(j) | the vector of manipulated movements at time instance j |
| u(j) | the input at time instance j |
| nT | the number of impulse response coefficients applied to design the system |
| A | the interaction matrix |
| δi | the coefficient number |
| r(j + h) | the desired profile |
| Wy and Wu | the positive semidefinite weighting matrices |
| Z | the control horizon |
| Δ uMPC_min | the minimum of the change of control signal generated by the MPC |
| Δ uMPC_max | the maximum of the change of control signal generated by the MPC |
| Δ fmin and Δfmax | the minimum and maximum of the frequency deviation, respectively |
| Δ PW_min | the minimum of the change of the wind power penetration |
| Δ PW_max | the maximum of the change of the wind power penetration |
| Δ Pinertia_min | the minimum of the change of the inertia power from the virtual inertia system |
| Δ Pinertia_max | the maximum of the change of the inertia power from the virtual inertia system |
| Δ fi | the rate of change of frequency at time instant i |
| Δ Pinertia,i | the virtual inertia power deviation at time instant i |
| yi | the input membership function of Δ fi |
| oi | the output membership function of Δ Pinertia,i |
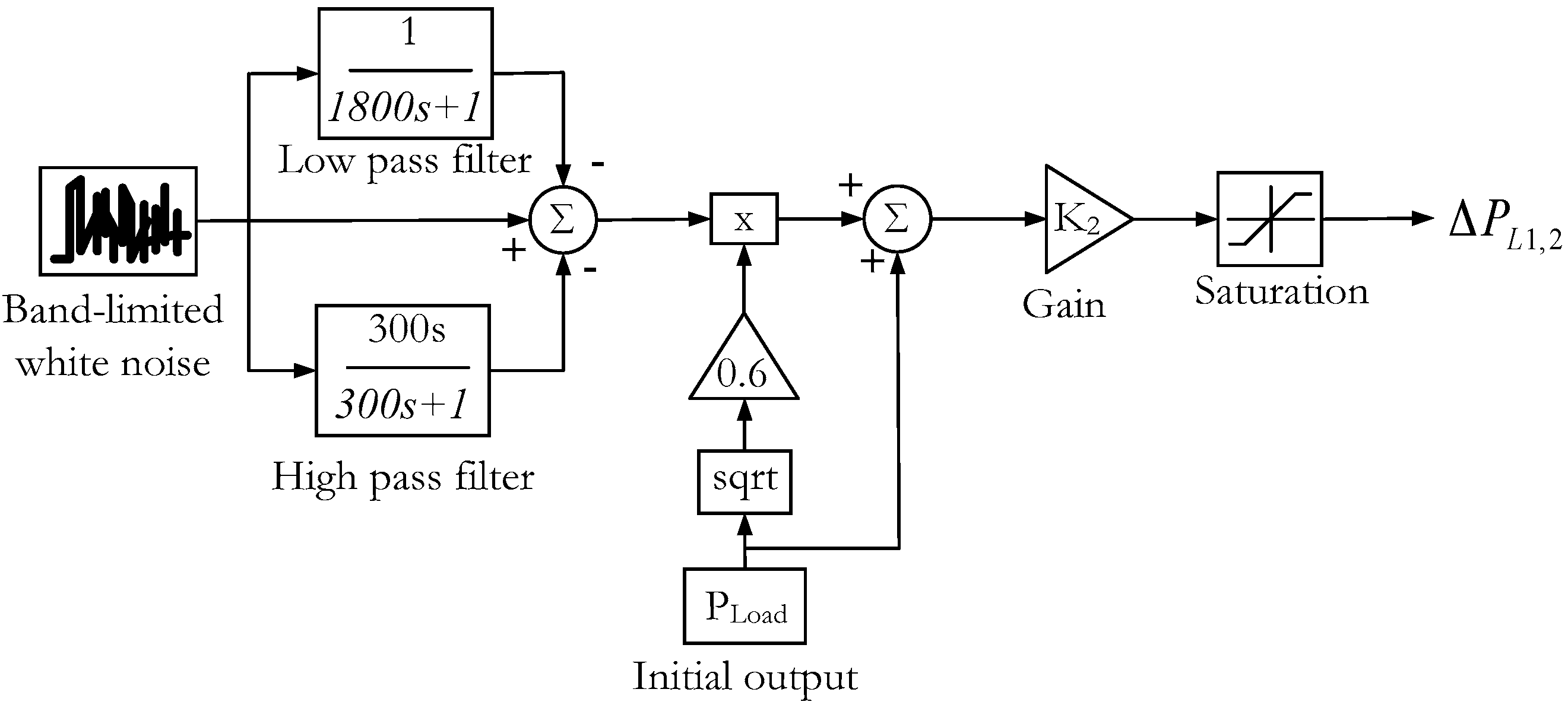
Appendix A. Load Model

References
- Kerdphol, T.; Qudaih, Y.; Mitani, Y. Optimum battery energy storage system using PSO considering dynamic demand response for microgrids. Int. J. Electr. Power Energy Syst. 2016, 83, 58–66. [Google Scholar] [CrossRef]
- Marzband, M.; Ghazimirsaeid, S.S.; Uppal, H.; Fernando, T. A real time evalution of energy management systems for smart hybrid home microgrids. Electr. Power Syst. Res. 2017, 143, 624–633. [Google Scholar] [CrossRef]
- Marzband, M.; Ardeshiri, R.; Moafi, M.; Uppal, H. Distributed generation for economic benefit maximization through coalition formation based game theory concept. Int. Trans. Electr. Energy Syst. 2017. [CrossRef]
- Yao, G.; Zhang, Z.; Tang, T.; Benbouzid, M. Small signal models based stability and controller parameters sensitivity analysis of microgrid in islanded mode. In Proceedings of the 40th Annual Conference of the IEEE Industrial Electronics Society, Dallas, TX, USA, 29 October–1 November 2014; pp. 4995–5001. [Google Scholar]
- Bevrani, H.; Watanabe, M.; Mitani, Y. Power System Monitoring and Control; John Wiley & Sons: Hoboken, NJ, USA, 2014; Chapter 9. [Google Scholar]
- Li, C.; Xu, J.; Zhao, C. A coherency-based equivalence method for MMC inverters using virtual synchronous generator control. IEEE Trans. Power Electron. 2012, 31, 1–6. [Google Scholar] [CrossRef]
- Liu, J.; Miura, Y.; Ise, T. Comparison of dynamic characteristics between virtual synchronous generator and droop control in inverter-based distributed generators. IEEE Trans. Power Electron. 2015, 31, 3600–3611. [Google Scholar] [CrossRef]
- Chen, Y.; Hesse, R.; Turschner, D.; Beck, H.P. Investigation of the virtual synchronous machine in the islanded mode. In Proceedings of the IEEE Transactions on Power Delivery, Berlin, Germany, 14–17 October 2012; pp. 1369–1378. [Google Scholar]
- Beck, H.P.; Hesse, R. Virtual synchronous machine. In Proceedings of the 9th International Conference on Power Quality and Utilizations, Barcelona, Spain, 9–11 October 2007; pp. 1–6. [Google Scholar]
- Karapanos, V.; Haan, S.; Zwetsloot, K. Real time simulation of a power system with VSG hardware in the loop. In Proceedings of the 37th Annual conference on IEEE Industrial Electronics Society, Melbourne, Australia, 7–10 November 2011; pp. 3748–3754. [Google Scholar]
- Zhong, Q.C.; Weiss, G. Synchonverter: Inverters that mimic synchronous generators. IEEE Trans. Ind. Electron. 2011, 58, 1259–1265. [Google Scholar] [CrossRef]
- Cam, E.; Kocaarslan, I. Load frequency control in two area power systems using fuzzy logic controller. Energy Convers. Manag. 2005, 46, 233–243. [Google Scholar] [CrossRef]
- Birch, A.P.; Sapeluk, A.T.; Ozveren, C.S. An enhanced neural network load frequency control technique. In Proceedings of the International Conference on Control (Control ’94), Coventry, UK, 21–24 March 1994; p. 389. [Google Scholar]
- Farhangi, R.; Boroushaki, M.; Hosseini, H. Load-frequency control of interconnected power system suing emotional learning-based intelligent controller. Electr. Power Energy Syst. 2012, 36, 76–83. [Google Scholar]
- Kerdphol, T.; Qudaih, Y.; Watanabe, Y.; Mitani, Y. RBF neural network-based online intelligent management of a battery energy storage system for stand-alone microgrids. Energy Sustain. Soc. 2016, 6, 1–16. [Google Scholar] [CrossRef]
- Mayer, B.; Killian, M.; Kozek, M. Hierarchical model predictive control for sustainable building automation. Sustainability 2017, 9, 1–20. [Google Scholar] [CrossRef]
- Kong, X.B.; Lui, X.J.; Lee, K.Y. An effective nonlinear multiple variable HMPC for USC Power Plant incorporating NFN-based Modelling. IEEE Trans. Ind. Inform. 2016, 12, 555–566. [Google Scholar] [CrossRef]
- Kong, X.B.; Liu, X.J.; Lee, K.Y. Nonlinear multivariable hierarchical model predictive control for boiler-turbine system. Energy 2016, 93, 309–322. [Google Scholar] [CrossRef]
- Liu, X.J.; Jiang, D.; Lee, K.Y. Quasi-min-max-fuzzy MPC of UTSG water level based on off-line invariant set. IEEE Trans. Nucl. Sci. 2015, 62, 2266–2272. [Google Scholar] [CrossRef]
- Hu, K.; Yuan, J.Q. Multi-model predictive control method for nuclear steam generator water level. Energy Convers. Manag. 2008, 49, 1167–1174. [Google Scholar] [CrossRef]
- Mohamed, T.H.; Bevrani, H.; Hassan, A.A.; Hiyama, T. Decentralized model predictive based load frequency control in an interconnected power system. Energy Convers. Manag. 2011, 52, 1208–1214. [Google Scholar] [CrossRef]
- Mohamed, T.H.; Morel, J.; Bevrani, H.; Hiyama, T. Model predictive based load frequency control design concerning wind turbines. Int. J. Electr. Power Energy Syst. 2012, 43, 859–867. [Google Scholar] [CrossRef]
- Pahasa, J.; Ngamroo, I. Coordinated control of wind turbine blade pitch angle and PHEVs using MPCs for load frequency control of microgrid. IEEE Syst. J. 2016, 10, 97–105. [Google Scholar] [CrossRef]
- Pahasa, J.; Ngamroo, I. PHEVs bidirectional charging/discharging and SOC control for microgrid frequency stabilization using multiple MPC. IEEE Trans. Smart Grid 2015, 6, 526–533. [Google Scholar] [CrossRef]
- Senjyu, T.; Tokudome, M.; Yona, A.; Funabashi, T. A frequency control approach by decentralized controllable loads in small power systems. IEEJ Trans. Power Energy 2009, 129, 1074–1080. [Google Scholar] [CrossRef]
- Mentesidi, K.; Garde, R.; Aquado, M.; Rikos, E. Implementation of a fuzzy logic controller for virtual inertia emulation. In Proceedings of the IEEE International Symposium on Smart Electric Distribution System and Technologies, Vienna, Austria, 8–11 September 2015; pp. 1–6. [Google Scholar]
- Inoue, T.; Amano, H. A thermal power plant model for dynamic simulation of load frequency control. In Proceedings of the IEEE PES Power Systems Conference Exposition, Atlanta, GA, USA, 29 October–1 November 2006; pp. 1442–1447. [Google Scholar]
- Kundur, P. Power System Stability and Control; McGraw Hill: New York, NY, USA, 1993. [Google Scholar]
- Li, X.; Hui, D.; Lai, X.; Yan, T. Power quality control in wind/fuel cell/battery/hydrogen electrolyser hybrid microgrid power system. Appl. Exp. Qual. Control Conf. 2011, 1, 579–594. [Google Scholar]
- Michigami, T.; Ishii, T. Construction of fluctuation load model and dynamic simulation with LFC control of DC power system and frequency converter interconnection. In Proceedings of the IEEE PES Transmission Distribution Conference Exhibition, Yokohama, Japan, 6–10 October 2002; pp. 382–387. [Google Scholar]
- Licari, J.; Ekanayake, J.; Moore, I. Inertia response from full-power converter-based permanent magnet wind generator. J. Mod. Power Syst. Clean Energy 2013, 1, 26–33. [Google Scholar] [CrossRef]
- Weedy, B.M.; Cory, B.J.; Jenkins, N.; Ekanayake, J.B.; Strbac, G. Electric Power System, 5th ed.; John Wiley & Sons: London, UK, 2012. [Google Scholar]
- Bevrani, H. Robust Power System Frequency Control; Springer: Cham, Switzerland, 2014. [Google Scholar]
- Kufeoglu, S.; Lehtonen, M. A review on the theory of electric power reliability worth and customer interruption costs assessment techniques. In Proceedings of the International Conference on the European Energy Market (EEM), Porto, Portugal, 6–9 June 2016; pp. 6–9. [Google Scholar]
- Bemporad, A.; Morari, M.; Ricker, N.L. Model Predictive Control Toolbox User’s Guide; Mathworks Inc.: Natick, MA, USA, 2013. [Google Scholar]
- Pisaturo, M.; Cirrincione, M.; Senatore, A. Multiple constrained MPC design for automotive dry clutch engagement. IEEE Trans. Mechatron. 2014, 20, 469–480. [Google Scholar] [CrossRef]
- Vanantwerp, J.G.; Braatz, R.D. Fast model predictive control of sheet and film processes. IEEE Trans. Control Syst. 2005, 8, 408–417. [Google Scholar] [CrossRef]
- Bevrani, H.; Hiyama, T. Intelligent Automatic Generation Control; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Chown, G.A.; Hartman, R.C. Design and experience with a fuzzy logic controller for automatic generation control (AGC). IEEE Trans. Power Syst. 1998, 13, 965–970. [Google Scholar] [CrossRef]
- Feliachi, A.; Rerkpreedapong, D. NERC compliant load frequency control design using fuzzy rules. Electr. Power Syst. Res. 2005, 73, 101–106. [Google Scholar] [CrossRef]
- Rao, C.S.; Nagaraju, S.S.; Raju, P.S. Automatic generation control of TCPS based hydrothermal system under open market scenario: A fuzzy logic approach. Electr. Power Syst. Res. 2009, 31, 315–322. [Google Scholar] [CrossRef]
- Bevrani, H.; Daneshmand, P.R. Fuzzy logic-based load frequency control concerning high penetration of wind turbines. IEEE Syst. J. 2012, 6, 173–180. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Frequency bias factor, Bi (puMW/Hz) | 1 |
| Integral control variable gain, Ki | 0.05 |
| Governor time constant, Tg (s) | 0.1 |
| Turbine time constant, Tt (s) | 0.4 |
| Droop constant, R (Hz/puMW) | 2.4 |
| Microgrid system gain, KMG (Hz/puMW) | 120 |
| Microgrid time constant, TMG (s) | 20 |
| Virtual inertia variable gain, KVI | 0.08 |
| Virtual inertia time constant, TVI (s) | 10 |
| Maximum limit of valve gate, VU | 0.1 |
| Minimum limit of valve gate, VL | −0.1 |
| Input (Δfi) | NL | NS | ZO | PS | PL |
| Output (ΔPinertia,i) | PL | PS | ZO | NS | NL |
| Disturbance Source | Starting Time (s) | Stopping Time (s) | Size (MW) |
|---|---|---|---|
| Wind farm 1 | initial | - | 2.1 |
| Wind farm 2 | 450 s | - | 7.0 |
| Residential load | initial | 700 s | 2.2 |
| Industrial load | 200 s | - | 6.8 |
| Scenario | System Inertia | Mean Absolute Frequency Deviation (Hz) | |||
|---|---|---|---|---|---|
| No Virtual Inertia Controller | Virtual Inertia Controller | Virtual Inertia Controller-Based Fuzzy | Virtual Inertia Controller-Based MPC | ||
| 2A | High (100%) | 0.04764 | 0.04496 | 0.04218 | 0.02176 |
| 2B | Medium (50%) | 0.05107 | 0.04680 | 0.04401 | 0.02193 |
| 2C | Low (25%) | 0.73658 | 0.09433 | 0.09304 | 0.02540 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kerdphol, T.; Rahman, F.S.; Mitani, Y.; Hongesombut, K.; Küfeoğlu, S. Virtual Inertia Control-Based Model Predictive Control for Microgrid Frequency Stabilization Considering High Renewable Energy Integration. Sustainability 2017, 9, 773. https://doi.org/10.3390/su9050773
Kerdphol T, Rahman FS, Mitani Y, Hongesombut K, Küfeoğlu S. Virtual Inertia Control-Based Model Predictive Control for Microgrid Frequency Stabilization Considering High Renewable Energy Integration. Sustainability. 2017; 9(5):773. https://doi.org/10.3390/su9050773
Chicago/Turabian StyleKerdphol, Thongchart, Fathin S. Rahman, Yasunori Mitani, Komsan Hongesombut, and Sinan Küfeoğlu. 2017. "Virtual Inertia Control-Based Model Predictive Control for Microgrid Frequency Stabilization Considering High Renewable Energy Integration" Sustainability 9, no. 5: 773. https://doi.org/10.3390/su9050773
APA StyleKerdphol, T., Rahman, F. S., Mitani, Y., Hongesombut, K., & Küfeoğlu, S. (2017). Virtual Inertia Control-Based Model Predictive Control for Microgrid Frequency Stabilization Considering High Renewable Energy Integration. Sustainability, 9(5), 773. https://doi.org/10.3390/su9050773