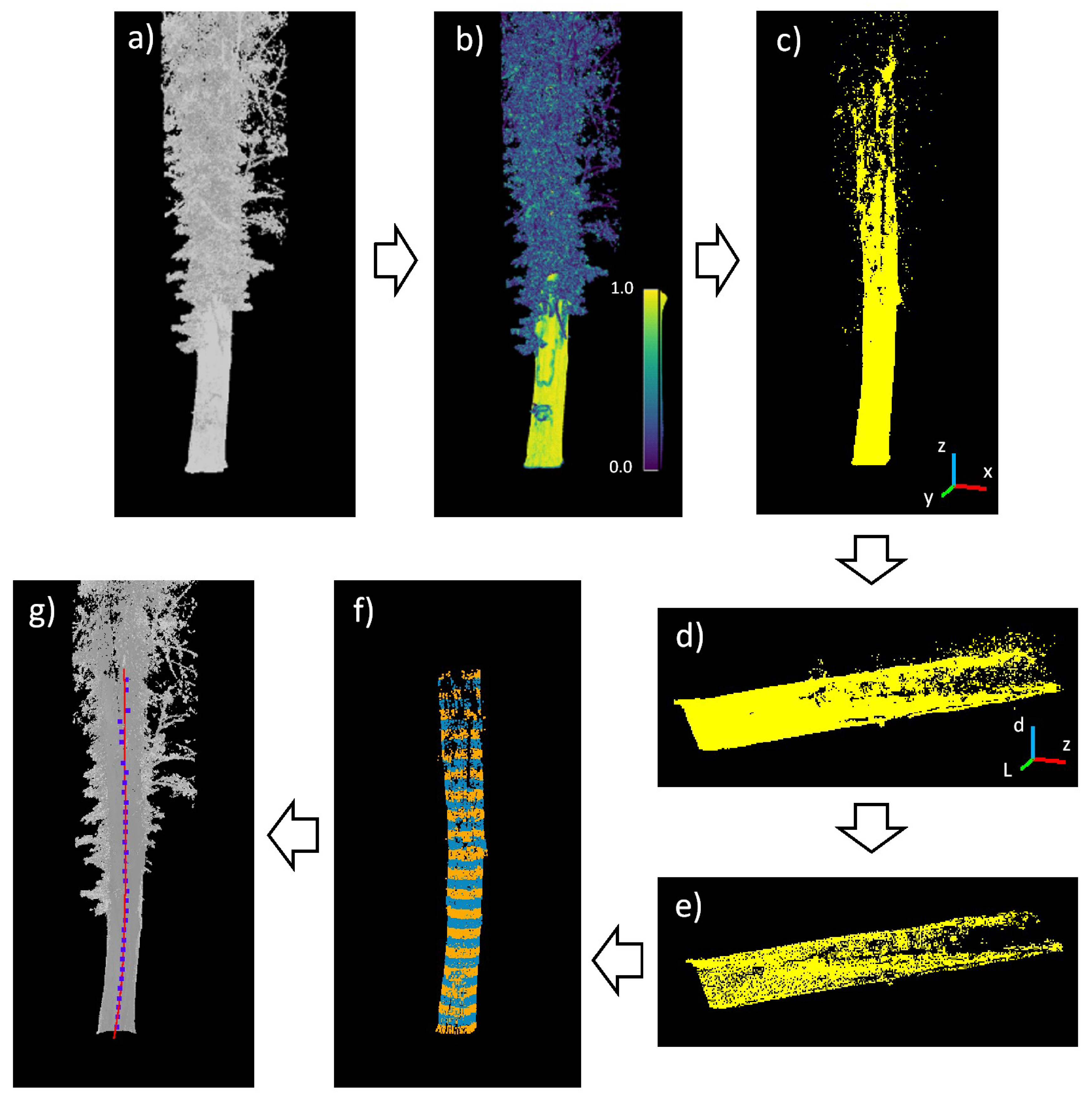
Figure 1.
Workflow for stem axis fitting: (a) original tree-stem point cloud; (b) calculation of planarity feature based on a fixed-radius point’s local neighborhood, which was considered to be within a sphere with a radius of 5 cm; (c) filtering out leaves and small tree branches; (d) “unrolling” the tree stem—xyz coordinates were transformed into Lzd using a cylinder fitted into the point cloud, where L is the length of circumference (m), z—z coordinate of the initial point cloud (m), d—distance to modeled cylinder surface (m); (e,f) filtering out the points located closest to the tree stem surface; (g) fitting the stem axis: the centers of the circles used for stem-axis fitting are in blue and the resulting stem axis in red.
Figure 1.
Workflow for stem axis fitting: (a) original tree-stem point cloud; (b) calculation of planarity feature based on a fixed-radius point’s local neighborhood, which was considered to be within a sphere with a radius of 5 cm; (c) filtering out leaves and small tree branches; (d) “unrolling” the tree stem—xyz coordinates were transformed into Lzd using a cylinder fitted into the point cloud, where L is the length of circumference (m), z—z coordinate of the initial point cloud (m), d—distance to modeled cylinder surface (m); (e,f) filtering out the points located closest to the tree stem surface; (g) fitting the stem axis: the centers of the circles used for stem-axis fitting are in blue and the resulting stem axis in red.
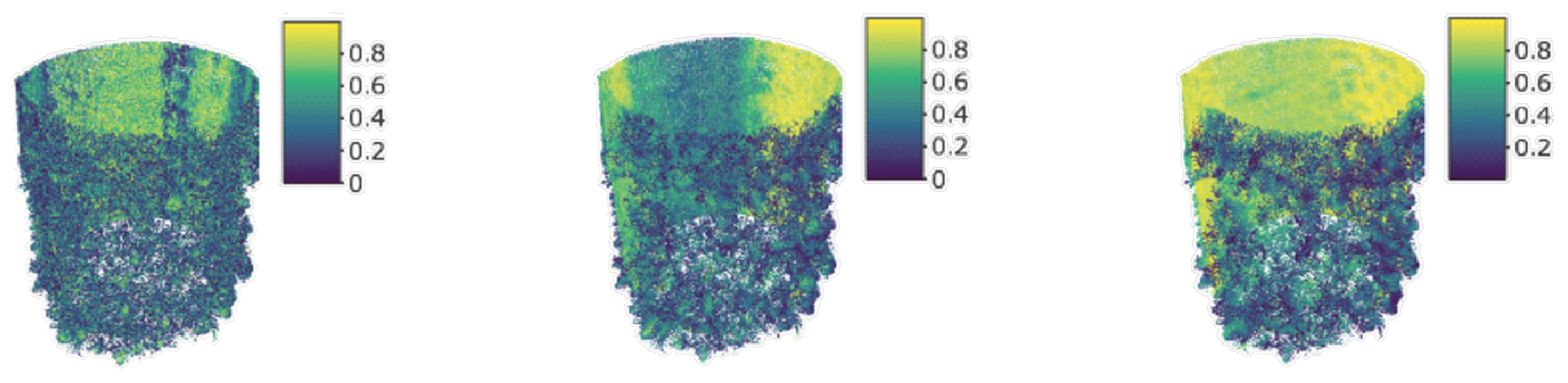
Figure 2.
Visualization of a local geometric feature (planarity), calculated for section of the tree stem partly covered with ivy, with scales of 1 cm, 2.5 cm and 5 cm (from left to right) for the point’s local neighborhoods. The local geometric features calculated on a small scale indicate small structures on the tree-stem surface, while those calculated on a bigger scale indicate more rough structures.
Figure 2.
Visualization of a local geometric feature (planarity), calculated for section of the tree stem partly covered with ivy, with scales of 1 cm, 2.5 cm and 5 cm (from left to right) for the point’s local neighborhoods. The local geometric features calculated on a small scale indicate small structures on the tree-stem surface, while those calculated on a bigger scale indicate more rough structures.
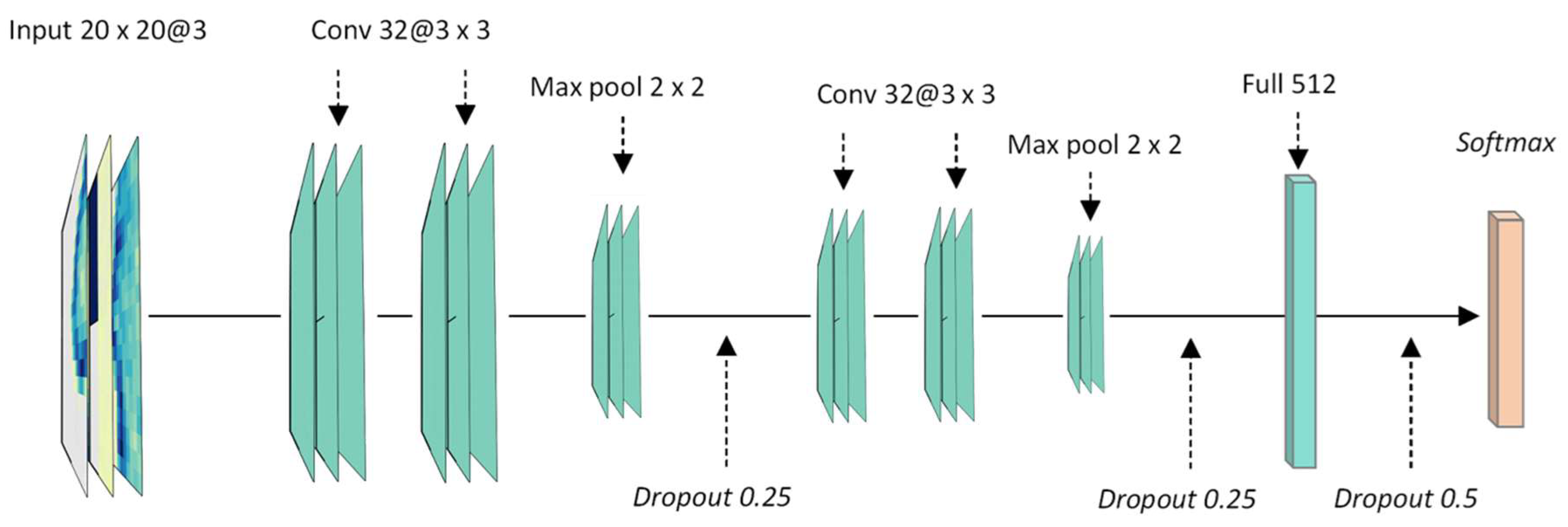
Figure 3.
Architecture of the Convolutional Neural Network used in this study: Input indicates the input data (a stack of rasterized multiview orthographic projections), Conv: a convolutional layer, Max pool: a pooling layer calculating a maximum value, and Full: a fully connected layer.
Figure 3.
Architecture of the Convolutional Neural Network used in this study: Input indicates the input data (a stack of rasterized multiview orthographic projections), Conv: a convolutional layer, Max pool: a pooling layer calculating a maximum value, and Full: a fully connected layer.
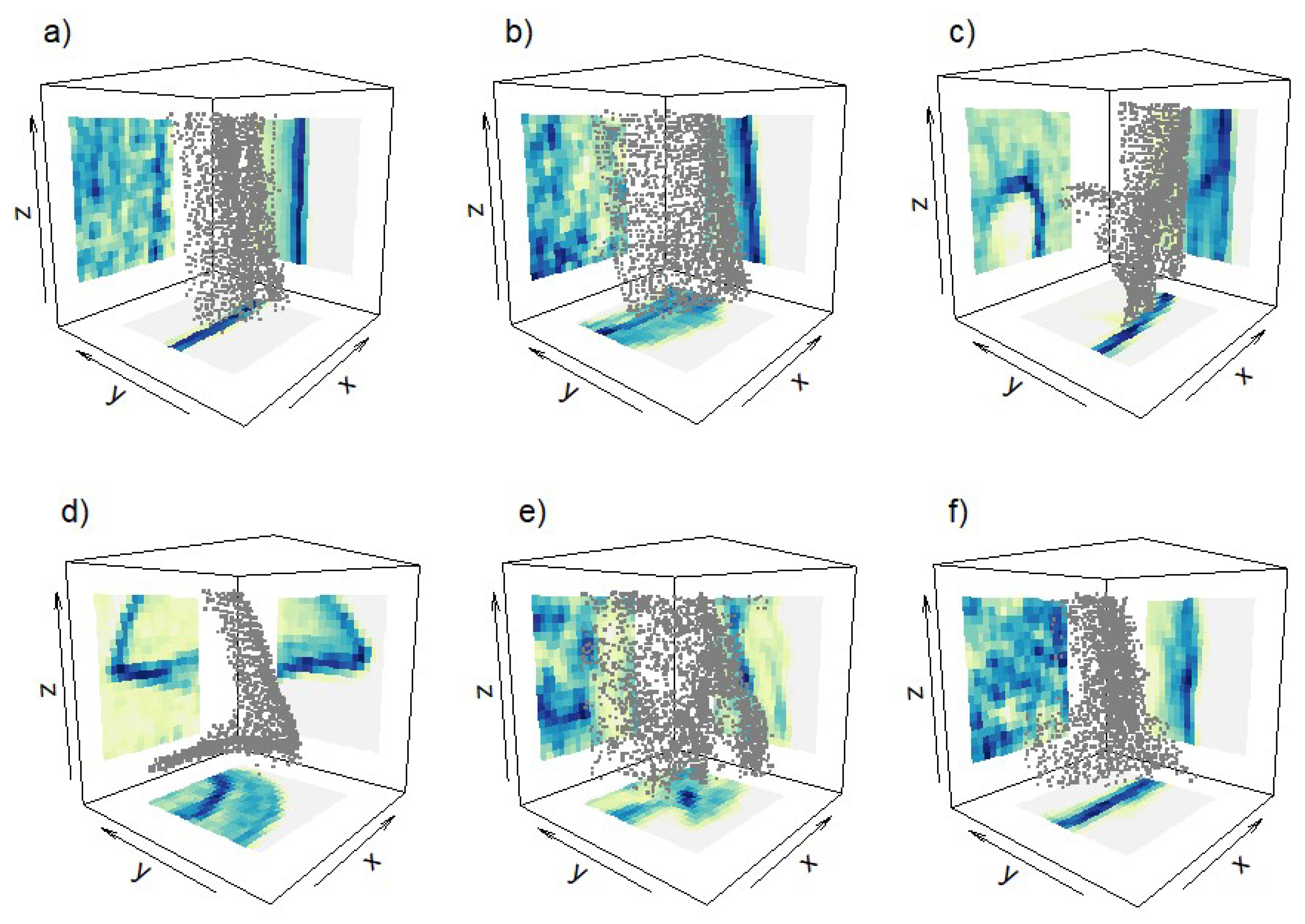
Figure 4.
Generating rasterized multiview orthographic projections (top view, front view and side view) for: (a) bark (BA), (b) bark pockets (BP), (c) cavities (CA), (d) fungi (FU), (e) ivy (IV), and (f) mosses (MO). The color gradient indicates the point accumulation: low in yellow, and high in dark blue.
Figure 4.
Generating rasterized multiview orthographic projections (top view, front view and side view) for: (a) bark (BA), (b) bark pockets (BP), (c) cavities (CA), (d) fungi (FU), (e) ivy (IV), and (f) mosses (MO). The color gradient indicates the point accumulation: low in yellow, and high in dark blue.
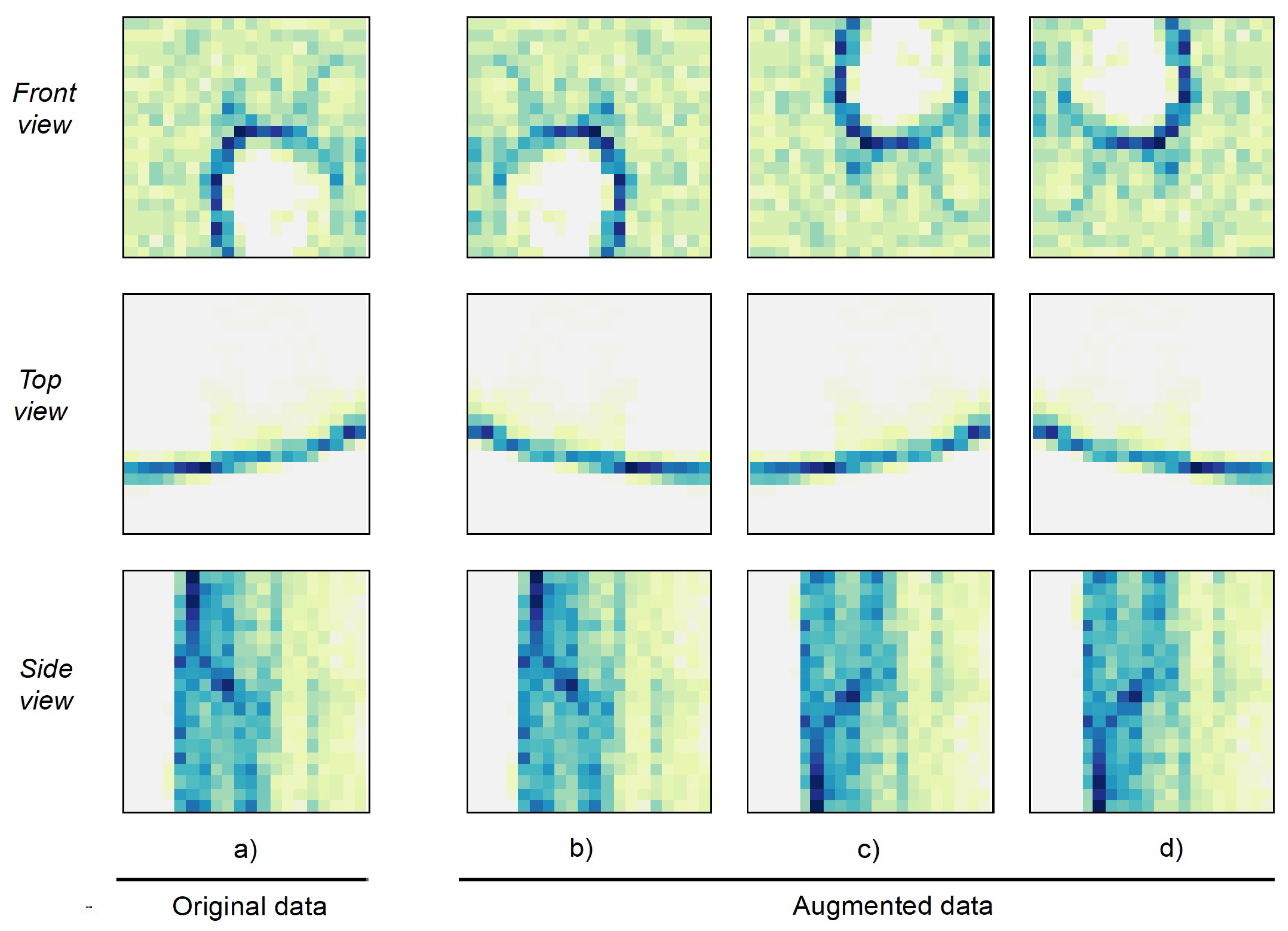
Figure 5.
Data augmentation: rasterized multiview orthographic projections of (a) the original point cloud and after flipping along the (b) yz, (c) xy, (d) xy and yz planes.
Figure 5.
Data augmentation: rasterized multiview orthographic projections of (a) the original point cloud and after flipping along the (b) yz, (c) xy, (d) xy and yz planes.
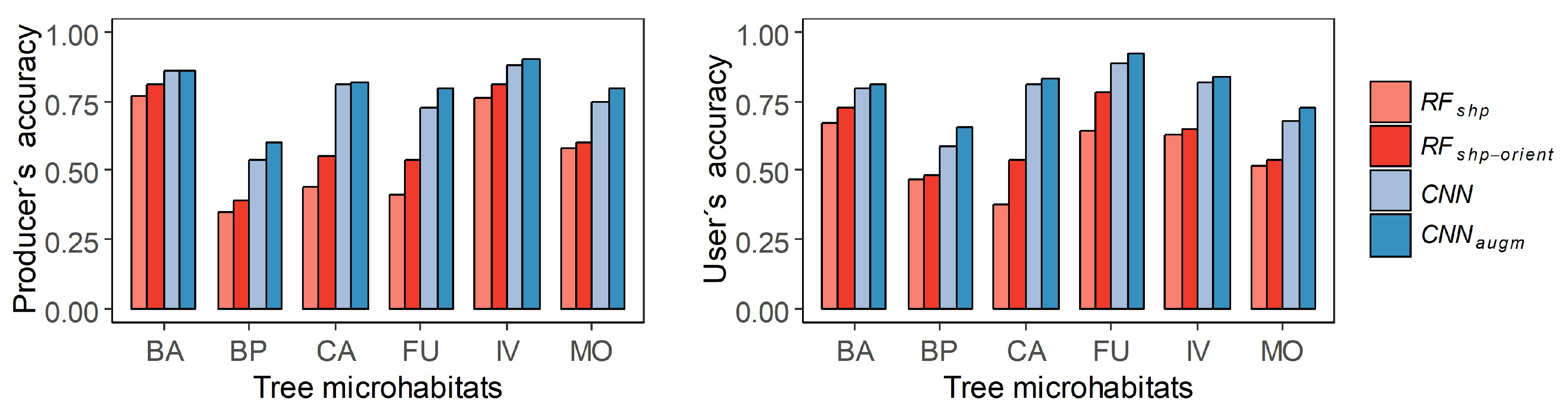
Figure 6.
Dynamics of producer’s accuracy (PA) and user’s accuracy (UA) for six groups of TreMs: bark (BA), bark pocket (BP), cavities (CA), fungi (FU), ivy (IV) and mosses (MO).
Figure 6.
Dynamics of producer’s accuracy (PA) and user’s accuracy (UA) for six groups of TreMs: bark (BA), bark pocket (BP), cavities (CA), fungi (FU), ivy (IV) and mosses (MO).
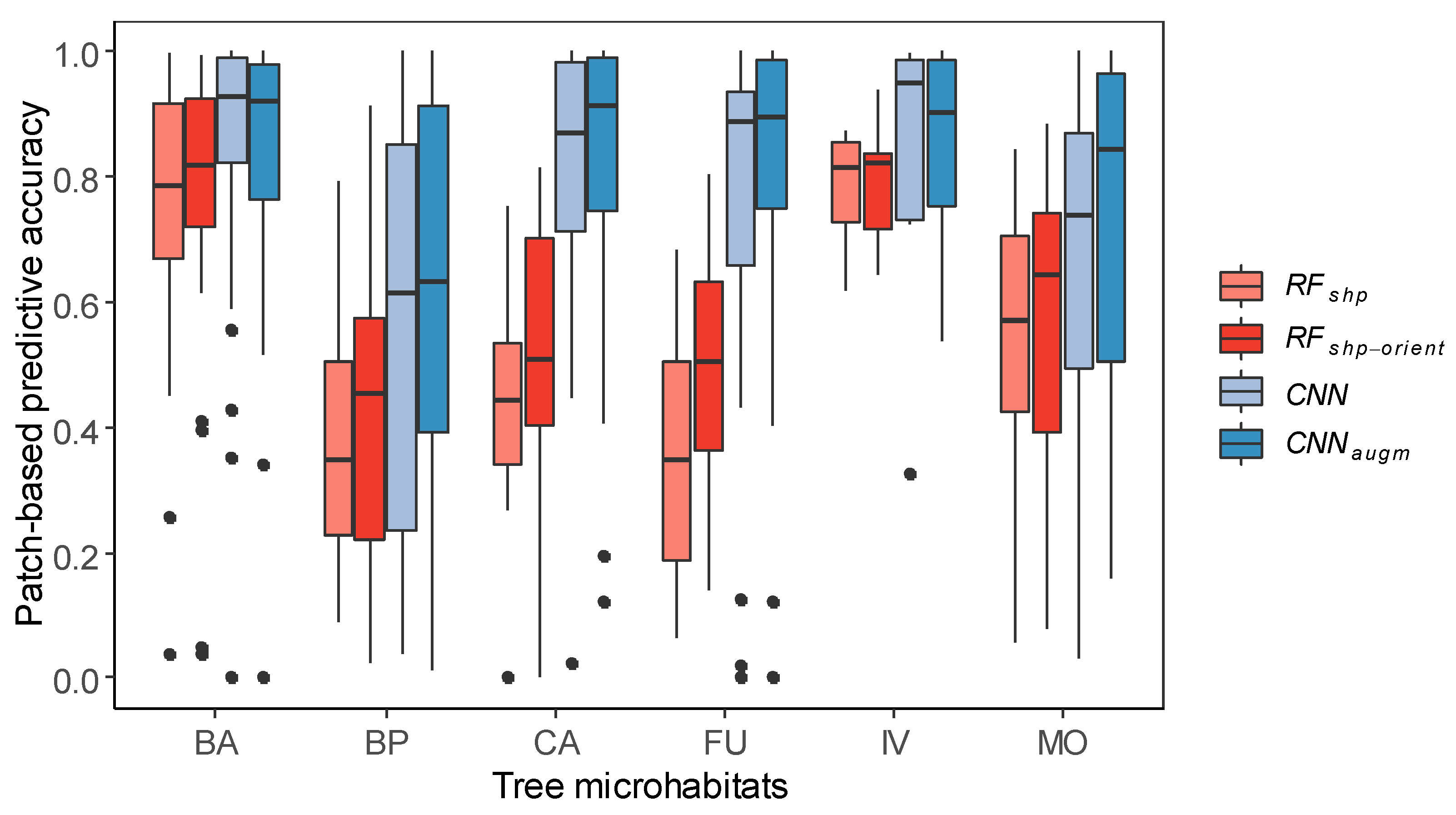
Figure 7.
Distributions of patch-based predictive accuracies of six groups of TreMs obtained using RFshp, RFshp–orient, CNN and CNNaugm. The values were calculated for each of the 173 patches associated with the six groups of TreMs: bark (BA), bark pocket (BP), cavities (CA), fungi (FU), ivy (IV) and mosses (MO).
Figure 7.
Distributions of patch-based predictive accuracies of six groups of TreMs obtained using RFshp, RFshp–orient, CNN and CNNaugm. The values were calculated for each of the 173 patches associated with the six groups of TreMs: bark (BA), bark pocket (BP), cavities (CA), fungi (FU), ivy (IV) and mosses (MO).
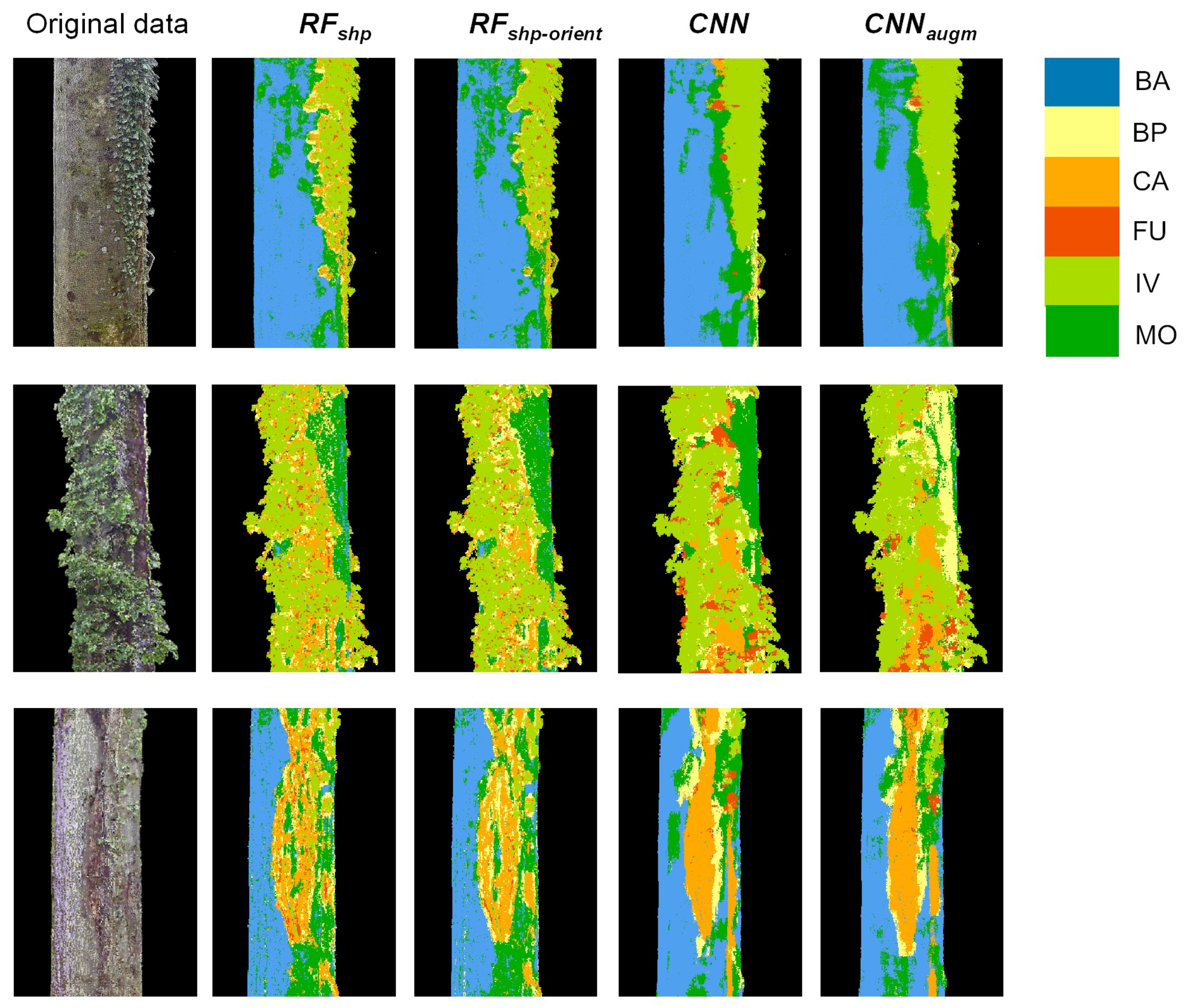
Figure 8.
Examples of semantic labeling results for parts of a tree stem with ivy and mosses (top row), with ivy, mosses and cavities (middle row), and with cavities (bottom row).
Figure 8.
Examples of semantic labeling results for parts of a tree stem with ivy and mosses (top row), with ivy, mosses and cavities (middle row), and with cavities (bottom row).
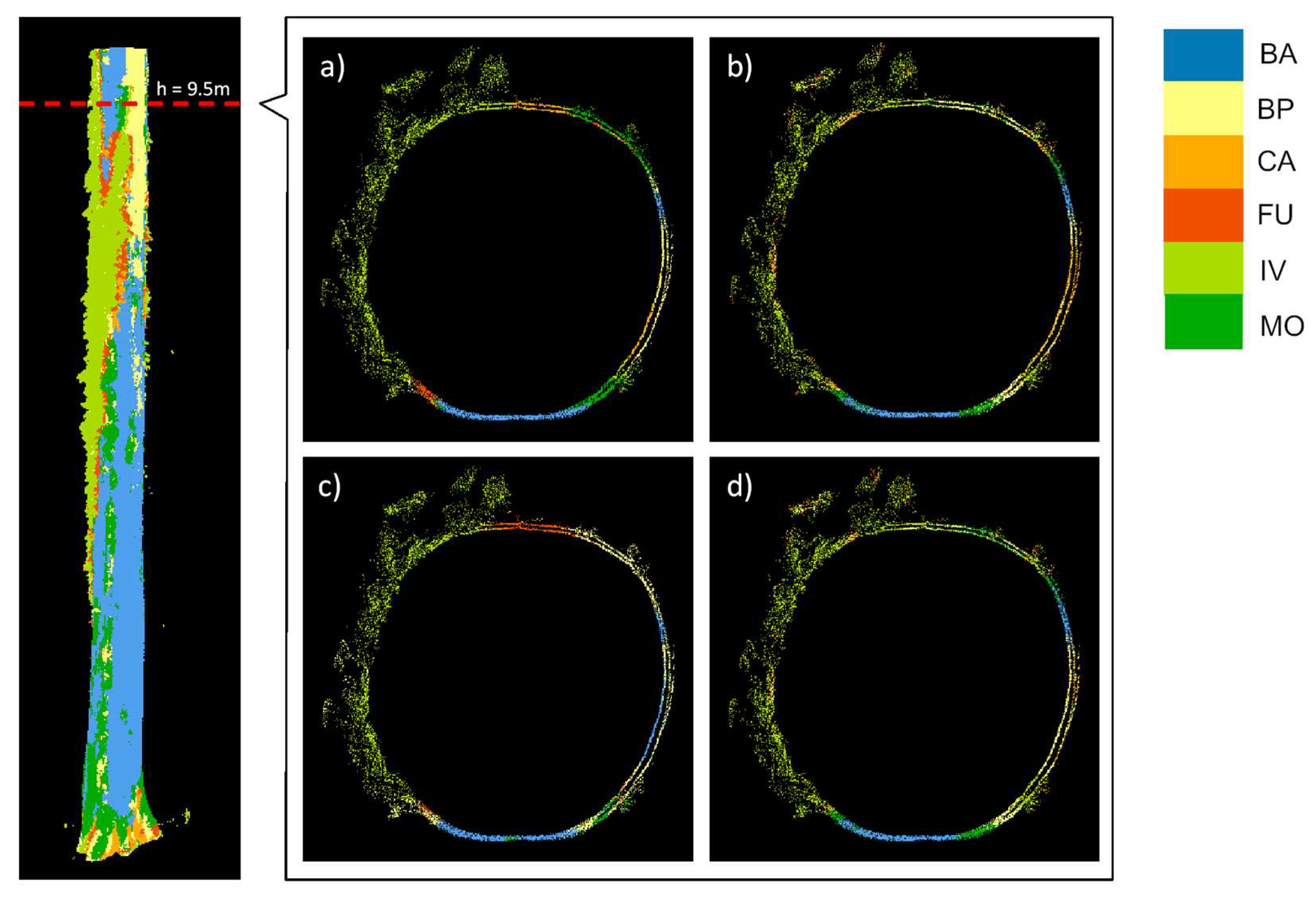
Figure 9.
Misclassifications arising from scan co-registration errors. The tree-stem point cloud was labeled using a deep Convolutional Neural Network (left). In the upper part of the tree stem, bark (BA) was misclassified as bark pockets (BP) but it was correctly classified in the lower part of the tree stem. Detailed inspection shows such misclassifications occurred in the regions of the point cloud where scan co-registration failed (right), independent of the classification model used. The cross-sections were collected at h = 9.5 m in the tree-stem point clouds and labeled using the (a) RFshp, (b) RFshp–orient, (c) CNN and (d) CNNaugm classification models.
Figure 9.
Misclassifications arising from scan co-registration errors. The tree-stem point cloud was labeled using a deep Convolutional Neural Network (left). In the upper part of the tree stem, bark (BA) was misclassified as bark pockets (BP) but it was correctly classified in the lower part of the tree stem. Detailed inspection shows such misclassifications occurred in the regions of the point cloud where scan co-registration failed (right), independent of the classification model used. The cross-sections were collected at h = 9.5 m in the tree-stem point clouds and labeled using the (a) RFshp, (b) RFshp–orient, (c) CNN and (d) CNNaugm classification models.
Table 1.
Technical specifications of the FARO Focus 3D S120 laser scanner.
Table 1.
Technical specifications of the FARO Focus 3D S120 laser scanner.
| Ranging unit | Range | 0.6–120 m |
| Ranging error | ±2 mm |
| Deflection unit | Field of view (vertical/horizontal) | 305°/360° |
| Step size (vertical/horizontal) | 0.009°/0.009° |
| Laser | Wavelength | 905 nm |
| Beam diameter at exit | 3.0 mm |
| Beam divergence | 0.011° |
Table 2.
Scanning design used in the study.
Table 2.
Scanning design used in the study.
| Parameter | Setting |
|---|
| Number of scans per tree | 6 |
| Angular resolution (vertical/horizontal) | 0.018°/0.018° |
| Distance from scanner to tree | 5–7 m |
| RGB images | Yes |
| Intensity | Yes |
Table 3.
Definitions of the tree-related microhabitats (TreMs) addressed in the study.
Table 3.
Definitions of the tree-related microhabitats (TreMs) addressed in the study.
| TreM Type | Definition | Threshold for Inclusion |
|---|
| Bark loss and exposed wood | Exposed wood and missing bark | Coverage > 1% |
| Bark pocket | Space between peeled-off bark and sapwood forming a pocket (open at the top) or shelter (open at the bottom) | Depth > 1 cm |
| Crack | Crack through the bark or the wood | Width > 1 cm |
| Fungi | Tough fruiting bodies of perennial polypores | Diameter > 2 cm |
| Ivy | Tree stem covered with ivy | Coverage > 1% |
| Lichen | Tree stem covered with foliose and fruticose lichens | Coverage > 1% |
| Moss | Tree stem covered with moss | Coverage > 1% |
| Stem hole | Tree stem rot-hole; cavities resulting from an injury or branch loss | Length > 2 cm, |
| width > 2 cm |
| Woodpecker cavity | Woodpecker foraging excavation | Length > 2 cm, |
| width > 2 cm |
| Woodpecker hole | Woodpecker breeding cavities | Diameter > 4 cm |
Table 4.
Setups of the classification models trained for automatic identification of TreMs.
Table 4.
Setups of the classification models trained for automatic identification of TreMs.
| Classification Model | Classifier | Input Data | Input Data Pre-Processing |
|---|
| RFshp | Random Forest | 3D shape features () | None |
| RFshp–orient | Random Forest | 3D shape features + orientation features () | None |
| CNN | Convolutional Neural Network | rasterized multiview orthographic projections | None |
| CNNaugm | Convolutional Neural Network | rasterized multiview orthographic projections | Augmentation |
Table 5.
Sample set used in this study with TreM types included into TreM groups, number of trees used to collect point patches, and number of patches collected for each TreM group.
Table 5.
Sample set used in this study with TreM types included into TreM groups, number of trees used to collect point patches, and number of patches collected for each TreM group.
| TreM Groups | TreM Types Included in the Group | Number of Trees Where Patches Were Collected | Number of Patches | Number of Points |
|---|
| Bark | Bark and exposed wood | 10 | 43 | 761,820 |
| Bark pockets | Bark pockets | 8 | 35 | 220,420 |
| Cavities | Cracks, stem holes, woodpecker cavities and holes | 7 | 29 | 150,560 |
| Fungi | Fungi | 6 | 19 | 31,770 |
| Ivy | Ivy (foliage only) | 4 | 15 | 506,210 |
| Mosses | Mosses and lichens | 10 | 32 | 309,235 |
Table 6.
Set of local 3D geometric features as used in this study. The features were derived from eigenvalues and eigenvectors of the covariance tensor of a point’s local 3D neighborhood, which was defined on different scales varying from rmin = 1 cm to rmax = 5 cm with ∆r = 0.5 cm.
Table 6.
Set of local 3D geometric features as used in this study. The features were derived from eigenvalues and eigenvectors of the covariance tensor of a point’s local 3D neighborhood, which was defined on different scales varying from rmin = 1 cm to rmax = 5 cm with ∆r = 0.5 cm.
| Feature Family | Feature Based on a Local 3D Structure Tensor | Feature Definition |
|---|
| 3D shape features | First eigenvalue | |
| Second eigenvalue |
| | Linearity | |
| | Planarity | |
| | Sphericity | |
| | Omnivariance | |
| | Anisotropy | |
| | Eigenentropy | |
| | Surface variation | |
| Orientation features | 3D orientation | |
| | 2D orientation | |
Table 7.
Error matrix after the patch-based leave-one-out cross-validation (LOOCV) of RF classification models based on 3D shape features (RFshp) for the identification of the six groups of TreMs: bark (BA), bark pockets (BP), cavities (CA), fungi (FU), ivy (IV) and mosses (MO). The performance of the models was assessed using LOOCV. In total, 173 models were trained, each predicted on the points belonging to the “leaved-out” patch.
Table 7.
Error matrix after the patch-based leave-one-out cross-validation (LOOCV) of RF classification models based on 3D shape features (RFshp) for the identification of the six groups of TreMs: bark (BA), bark pockets (BP), cavities (CA), fungi (FU), ivy (IV) and mosses (MO). The performance of the models was assessed using LOOCV. In total, 173 models were trained, each predicted on the points belonging to the “leaved-out” patch.
| Reference | Prediction | Producer’s Accuracy |
|---|
| BA | BP | CA | FU | IV | MO |
|---|
| BA | 0.77 | 0.03 | 0.01 | 0.00 | 0.00 | 0.18 | 0.77 |
| BP | 0.11 | 0.35 | 0.18 | 0.04 | 0.11 | 0.21 | 0.35 |
| CA | 0.03 | 0.15 | 0.44 | 0.13 | 0.13 | 0.13 | 0.44 |
| FU | 0.00 | 0.06 | 0.32 | 0.41 | 0.21 | 0.00 | 0.41 |
| IV | 0.00 | 0.06 | 0.12 | 0.05 | 0.76 | 0.01 | 0.76 |
| MO | 0.24 | 0.09 | 0.08 | 0.00 | 0.01 | 0.58 | 0.58 |
| User’s accuracy | 0.67 | 0.47 | 0.38 | 0.64 | 0.63 | 0.52 | - |
| Overall accuracy: 0.661, Kappa: 0.553 |
Table 8.
Error matrix after the patch-based LOOCV of RF classification models based on 3D shape and orientation features (RFshp–orient) for the identification of the six groups of TreMs: bark (BA), bark pockets (BP), cavities (CA), fungi (FU), ivy (IV) and mosses (MO). The performance of the models was assessed using LOOCV. In total, 173 models were trained, each predicted on the points belonging to the “leaved-out” patch.
Table 8.
Error matrix after the patch-based LOOCV of RF classification models based on 3D shape and orientation features (RFshp–orient) for the identification of the six groups of TreMs: bark (BA), bark pockets (BP), cavities (CA), fungi (FU), ivy (IV) and mosses (MO). The performance of the models was assessed using LOOCV. In total, 173 models were trained, each predicted on the points belonging to the “leaved-out” patch.
| Reference | Prediction | Producer’s Accuracy |
|---|
| BA | BP | CA | FU | IV | MO |
|---|
| BA | 0.81 | 0.03 | 0.00 | 0.00 | 0.00 | 0.16 | 0.81 |
| BP | 0.08 | 0.39 | 0.17 | 0.03 | 0.11 | 0.23 | 0.39 |
| CA | 0.01 | 0.15 | 0.55 | 0.07 | 0.12 | 0.11 | 0.55 |
| FU | 0.00 | 0.07 | 0.18 | 0.54 | 0.20 | 0.00 | 0.54 |
| IV | 0.00 | 0.05 | 0.07 | 0.06 | 0.81 | 0.01 | 0.81 |
| MO | 0.22 | 0.13 | 0.05 | 0.00 | 0.01 | 0.60 | 0.60 |
| User’s accuracy | 0.73 | 0.48 | 0.54 | 0.78 | 0.65 | 0.54 | - |
| Overall accuracy: 0.704, Kappa: 0.608 |
Table 9.
Error matrix after the patch-based LOOCV of CNNs without data augmentation (CNN) for the identification of the six groups of TreMs: bark (BA), bark pockets (BP), cavities (CA), fungi (FU), ivy (IV) and mosses (MO). The performance of the models was assessed using LOOCV. In total, 173 models were trained, each predicted on the points belonging to the “leaved-out” patch.
Table 9.
Error matrix after the patch-based LOOCV of CNNs without data augmentation (CNN) for the identification of the six groups of TreMs: bark (BA), bark pockets (BP), cavities (CA), fungi (FU), ivy (IV) and mosses (MO). The performance of the models was assessed using LOOCV. In total, 173 models were trained, each predicted on the points belonging to the “leaved-out” patch.
| Reference | Prediction | Producer’s Accuracy |
|---|
| BA | BP | CA | FU | IV | MO |
|---|
| BA | 0.86 | 0.01 | 0.01 | 0.00 | 0.00 | 0.11 | 0.86 |
| BP | 0.03 | 0.54 | 0.08 | 0.05 | 0.14 | 0.16 | 0.54 |
| CA | 0.04 | 0.05 | 0.81 | 0.02 | 0.03 | 0.06 | 0.81 |
| FU | 0.00 | 0.14 | 0.08 | 0.73 | 0.03 | 0.02 | 0.73 |
| IV | 0.00 | 0.09 | 0.01 | 0.02 | 0.88 | 0.00 | 0.88 |
| MO | 0.14 | 0.08 | 0.01 | 0.01 | 0.00 | 0.75 | 0.75 |
| User’s accuracy | 0.80 | 0.59 | 0.81 | 0.89 | 0.82 | 0.68 | - |
| Overall accuracy: 0.807, Kappa: 0.744 |
Table 10.
Error matrix after the patch-based LOOCV of CNNs with data augmentation (CNNaugm) for the identification of the six groups of TreMs: bark (BA), bark pockets (BP), cavities (CA), fungi (FU), ivy (IV) and mosses (MO). The performance of the models was assessed using LOOCV. In total, 173 models were trained, each predicted on the points belonging to the “leaved-out” patch.
Table 10.
Error matrix after the patch-based LOOCV of CNNs with data augmentation (CNNaugm) for the identification of the six groups of TreMs: bark (BA), bark pockets (BP), cavities (CA), fungi (FU), ivy (IV) and mosses (MO). The performance of the models was assessed using LOOCV. In total, 173 models were trained, each predicted on the points belonging to the “leaved-out” patch.
| Reference | Prediction | Producer’s Accuracy |
|---|
| BA | BP | CA | FU | IV | MO |
|---|
| BA | 0.86 | 0.03 | 0.01 | 0.00 | 0.00 | 0.10 | 0.86 |
| BP | 0.05 | 0.60 | 0.07 | 0.03 | 0.13 | 0.12 | 0.60 |
| CA | 0.03 | 0.05 | 0.82 | 0.02 | 0.02 | 0.05 | 0.82 |
| FU | 0.00 | 0.09 | 0.07 | 0.80 | 0.03 | 0.02 | 0.80 |
| IV | 0.00 | 0.07 | 0.01 | 0.01 | 0.90 | 0.00 | 0.90 |
| MO | 0.11 | 0.06 | 0.01 | 0.01 | 0.00 | 0.80 | 0.80 |
| User’s accuracy | 0.81 | 0.66 | 0.83 | 0.92 | 0.84 | 0.73 | - |
| Overall accuracy: 0.828, Kappa: 0.771 |
Table 11.
Comparison of the classification models’ performances using the Kolmogorov–Smirnov significance test based on patch-based predictive accuracies. Statistically significant p-values are indicated in bold.
Table 11.
Comparison of the classification models’ performances using the Kolmogorov–Smirnov significance test based on patch-based predictive accuracies. Statistically significant p-values are indicated in bold.
| TreM Group | Classification Model | CNN | CNNaugm | RFshp |
|---|
| Bark | CNNaugm | 0.53 | | |
| | RFshp | 0.01 | 0.01 | |
| | RFshp–orient | 0.02 | 0.04 | 0.86 |
| Bark pockets | CNNaugm | 0.20 | | |
| | RFshp | 0.01 | 0.00 | |
| | RFshp–orient | 0.03 | 0.01 | 0.12 |
| Cavities | CNNaugm | 0.95 | | |
| | RFshp | 0.00 | 0.00 | |
| | RFshp–orient | 0.00 | 0.00 | 0.37 |
| Fungi | CNNaugm | 0.97 | | |
| | RFshp | 0.00 | 0.00 | |
| | RFshp–orient | 0.00 | 0.00 | 0.31 |
| Ivy | CNNaugm | 0.99 | | |
| | RFshp | 0.03 | 0.13 | |
| | RFshp–orient | 0.13 | 0.35 | 0.99 |
| Mosses | CNNaugm | 0.27 | | |
| | RFshp | 0.02 | 0.00 | |
| | RFshp–orient | 0.16 | 0.00 | 0.43 |













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}