Use of the SAR Shadowing Effect for Deforestation Detection with Sentinel-1 Time Series


Abstract
:
1. Introduction
2. Materials and Methods
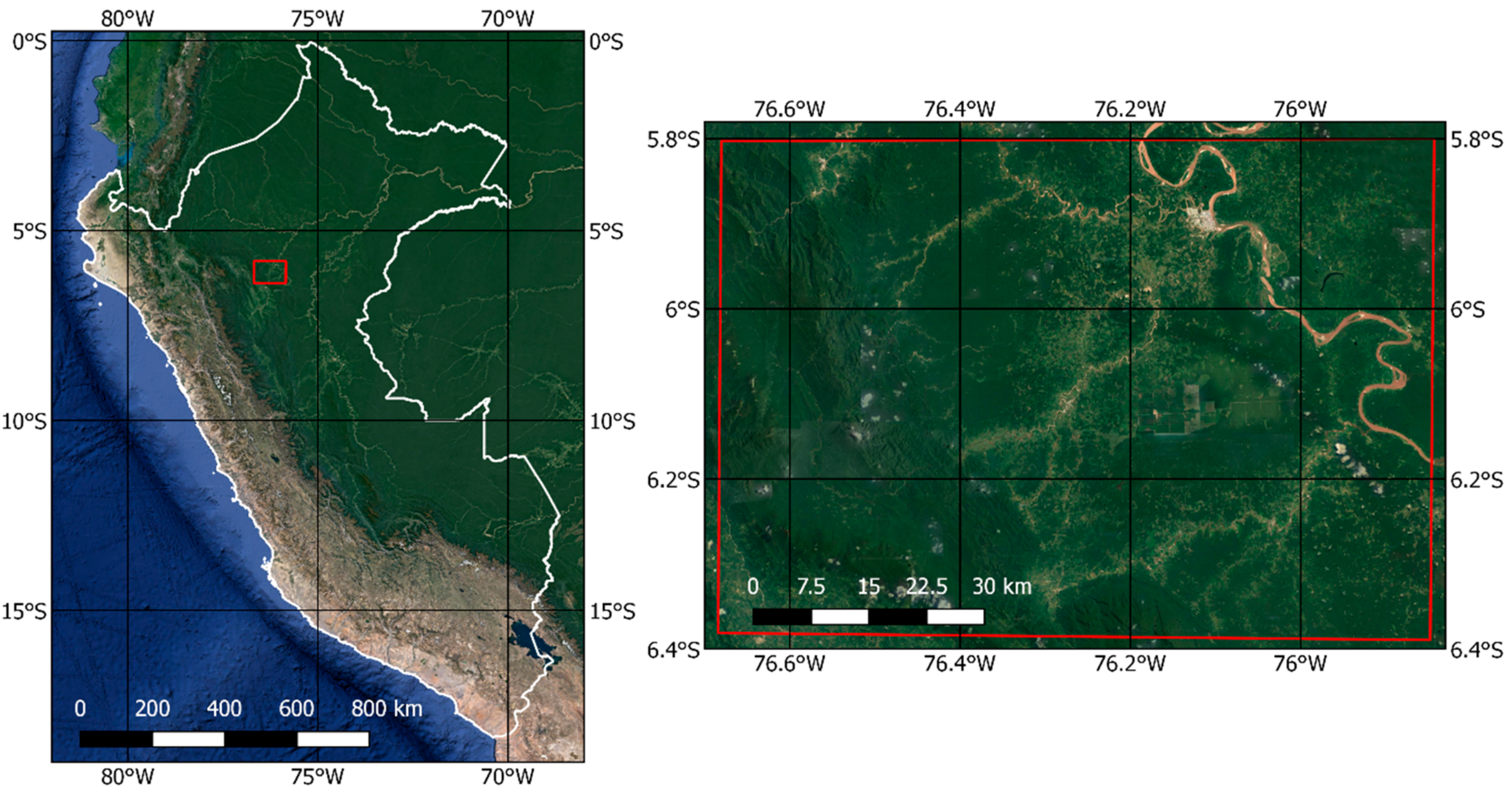
2.1. Study Area
2.2. Data
2.2.1. Sentinel-1 Data
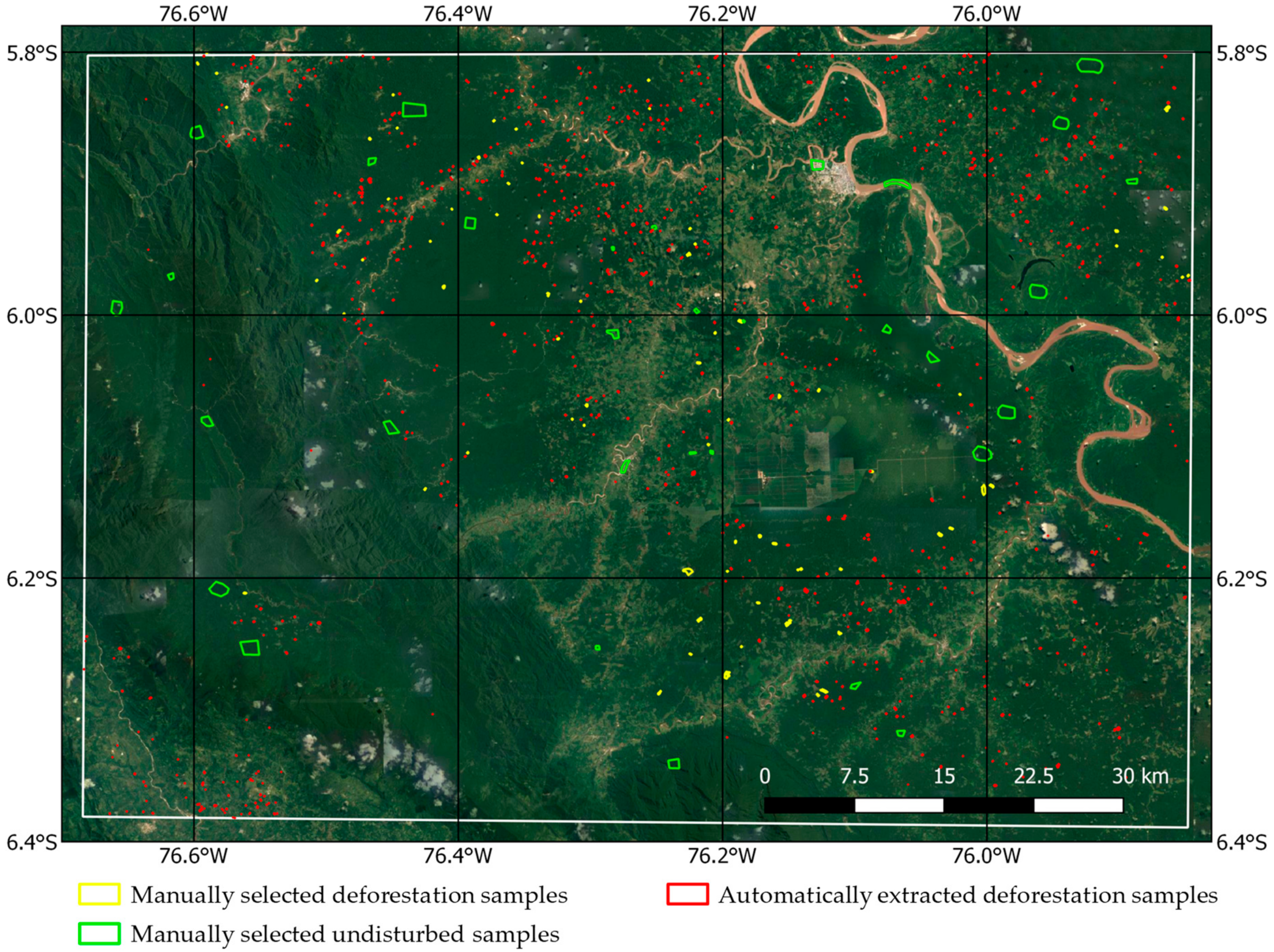
2.2.2. Reference Data
2.3. Methods
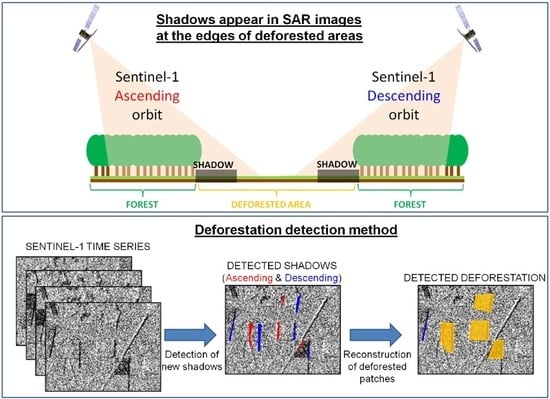
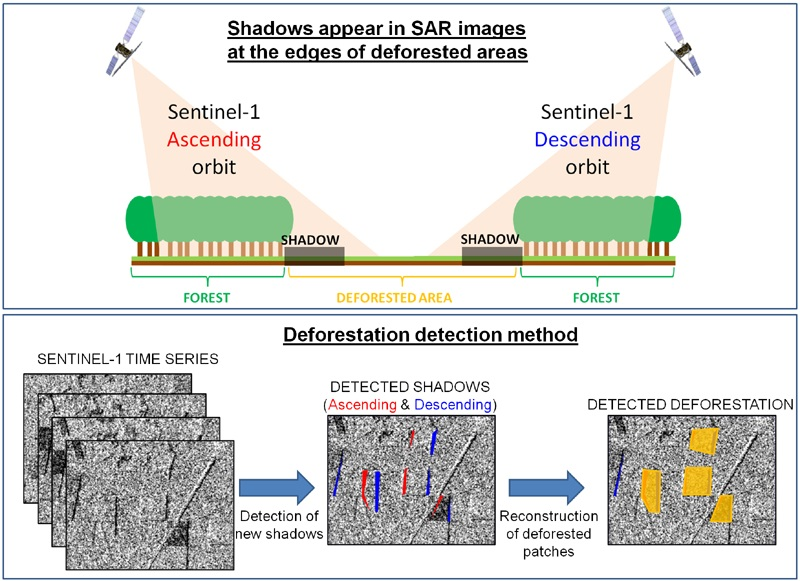
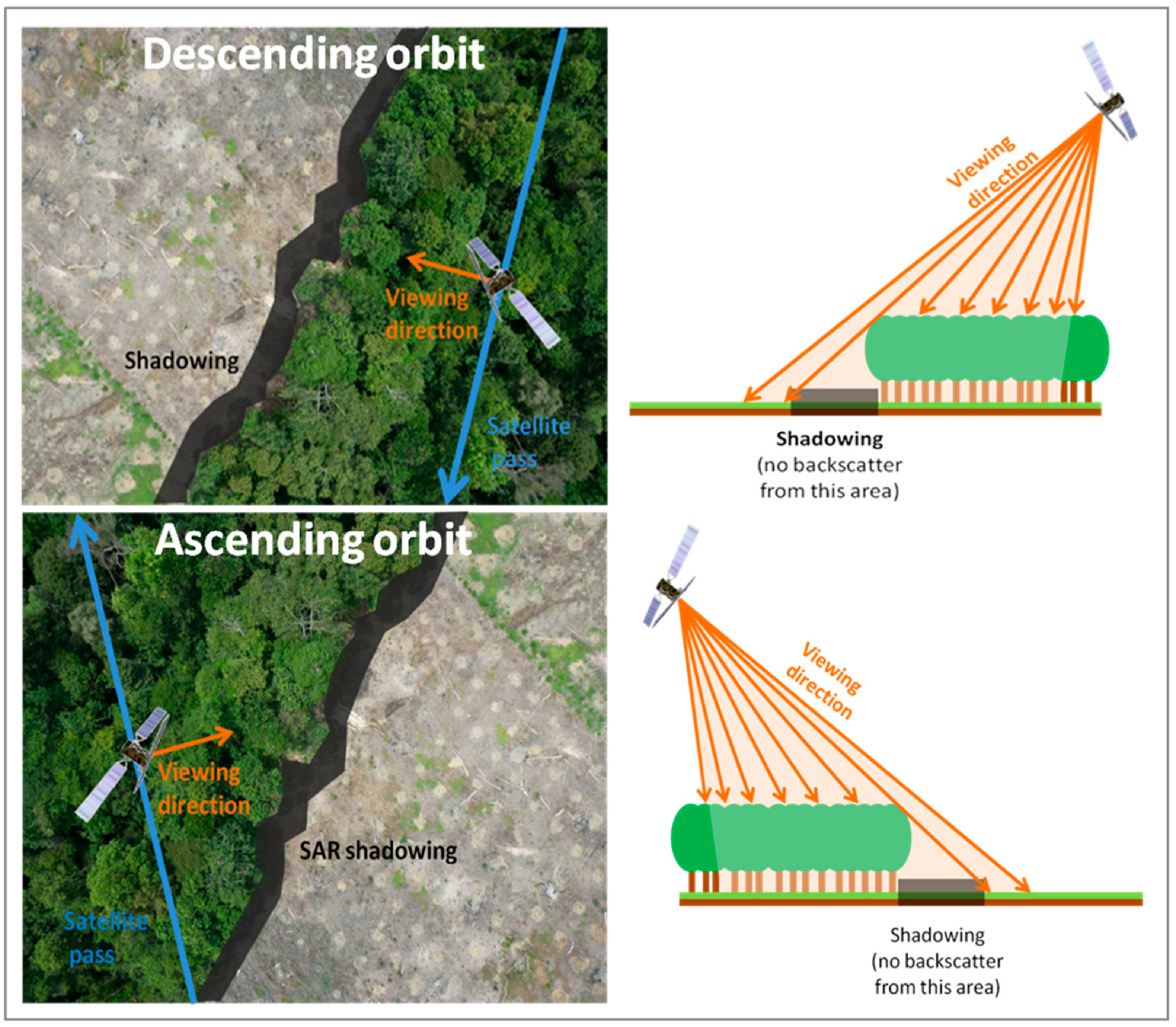
2.3.1. The Shadowing Effect as an Indicator of Deforestation
- Detect shadows that appear or disappear in a series of images
- Reconstruct the deforested patches associated to the shadows
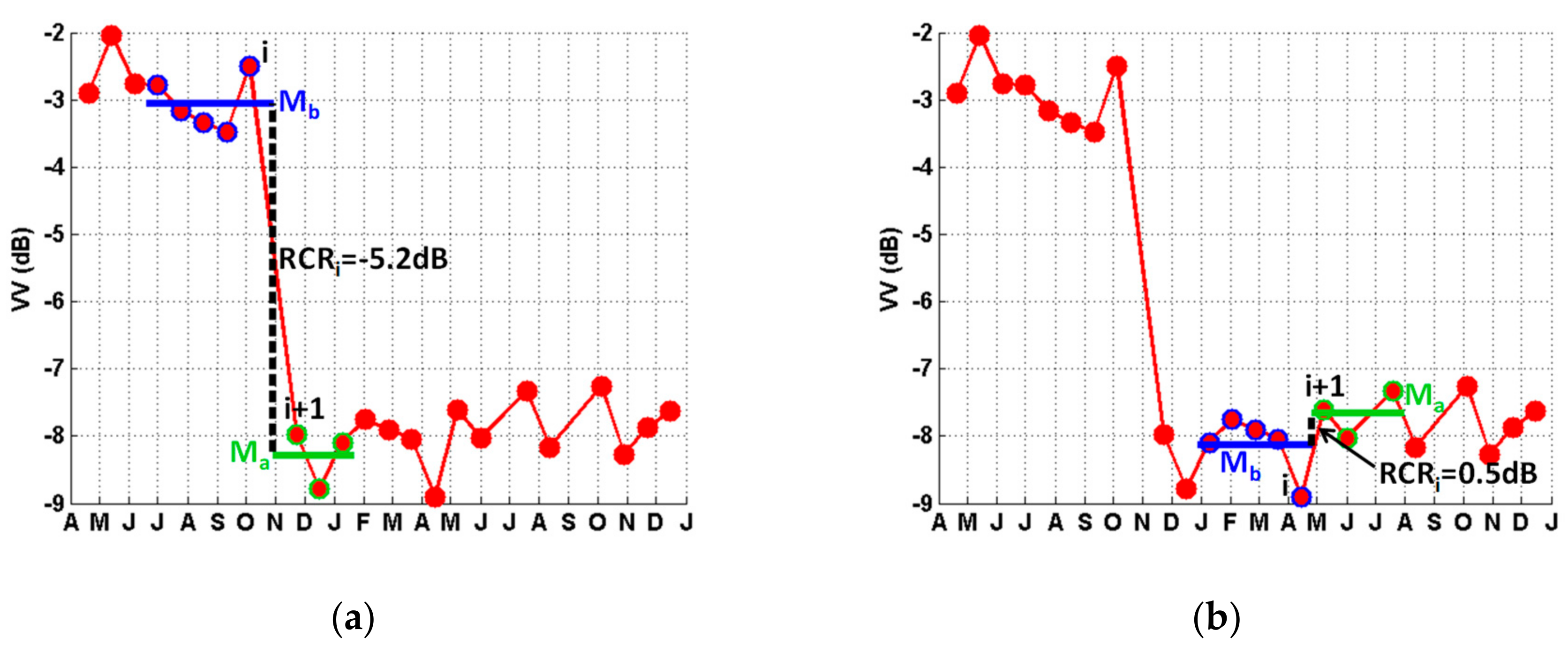
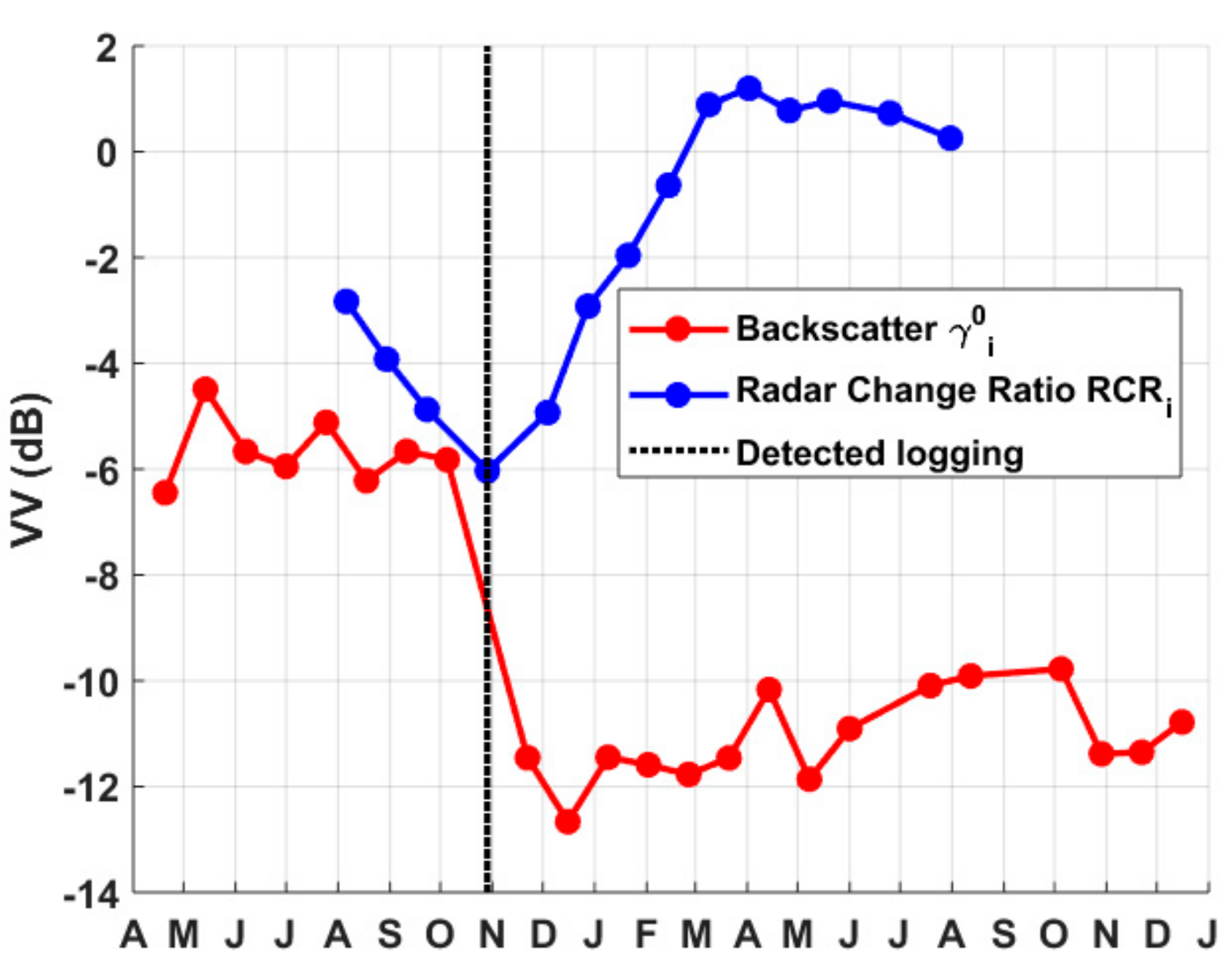
2.3.2. Detection of Shadows
- Higher values of Xb and Xa have the advantage to reduce the speckle effect and limit the detection of areas with intrinsically variable backscatter (e.g., crops).
- However, high values of Xa will delay the effective detection of deforestation, and will therefore hamper the NRT capacity of the approach. A trade-off must therefore be found between speckle filtering on one hand, and timely provision of results on the other hand. In this study, we chose Xa = 3, which proved to be sufficient in terms of speckle reduction.
- In principle, an Xb can be chosen that is as high as possible. Therefore, we chose to average all images acquired before the considered date, in order to reduce the sensibility of the change detection to seasonal and environmental effects affecting the backscatter.
2.3.3. Reconstruction of Deforested Patches
2.3.4. Post-Processing: Masking Undesirable Areas
3. Results
4. Discussion
- Thresholds: The method involves several parameters and thresholds, as described in Section 2.3.2 and Section 2.3.3. In particular, the thresholds that were applied on the minimum RCR image to detect shadows and potentially deforested areas (−4.5 dB and −3 dB respectively) were chosen empirically in this study, and might need to be adapted locally in order to account for the polarization, the local incidence angle, and the characteristics of the study area (for example, the type of deforestation, which will impact, more importantly, the second threshold).One way to define these thresholds automatically is to use statistics derived from reference samples, if available. The minimum RCR can be approximated as an intensity ratio. In that case, it has been shown that the optimal threshold ropt to distinguish between two classes of mean intensity ratios rA and rB (rA < rB) has a complex expression that involves other parameters that cannot be estimated in the general case (such as the proportion of each class), but can be approximated using the particular value [37].For example, the mean intensity ratio of shadows can be estimated using the mean values of the first quartile of the minimum RCR image of each reference deforestation sample, under the assumption that shadows cover approximately 25% of the deforested areas. This leads to rA = −7.2 dB in the manually selected deforestation samples. The mean intensity ratio of non-shadows is approximately rB = −2.1 dB (mean value of the minimum RCR image in the scene). This leads to a threshold of r0 = −4.65 dB, very close to the −4.5 dB value that we defined empirically. Regarding the second threshold used for the detection of potentially deforested areas, rA and rB can be calculated as the mean values of the minimum RCR image in the manually selected deforestation and undisturbed reference samples, and are found to be equal to rA = −4.6 dB and rB = −2.1 dB, leading to a threshold of r0 = −3.35 dB, again, very close to the −3 dB value defined empirically.
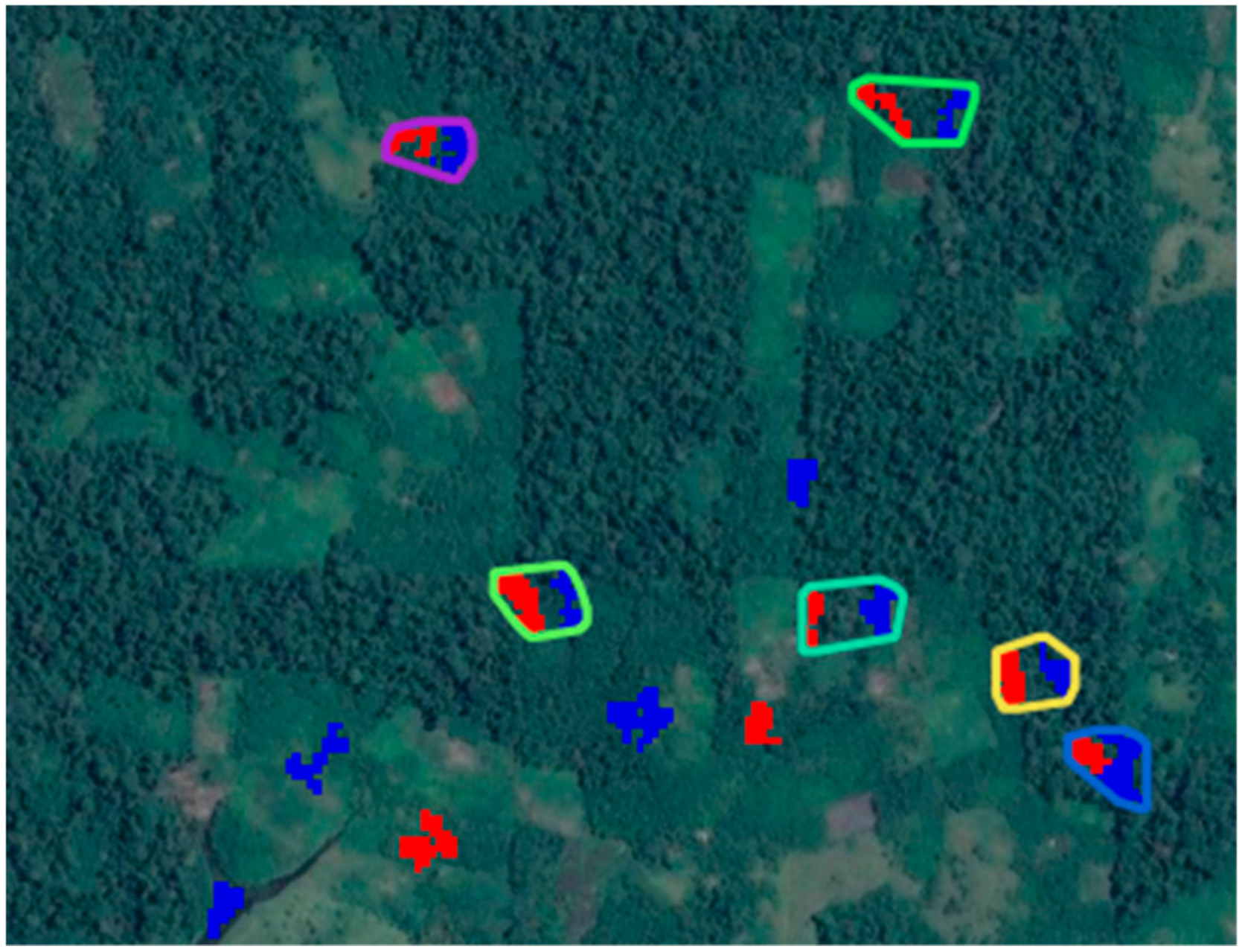
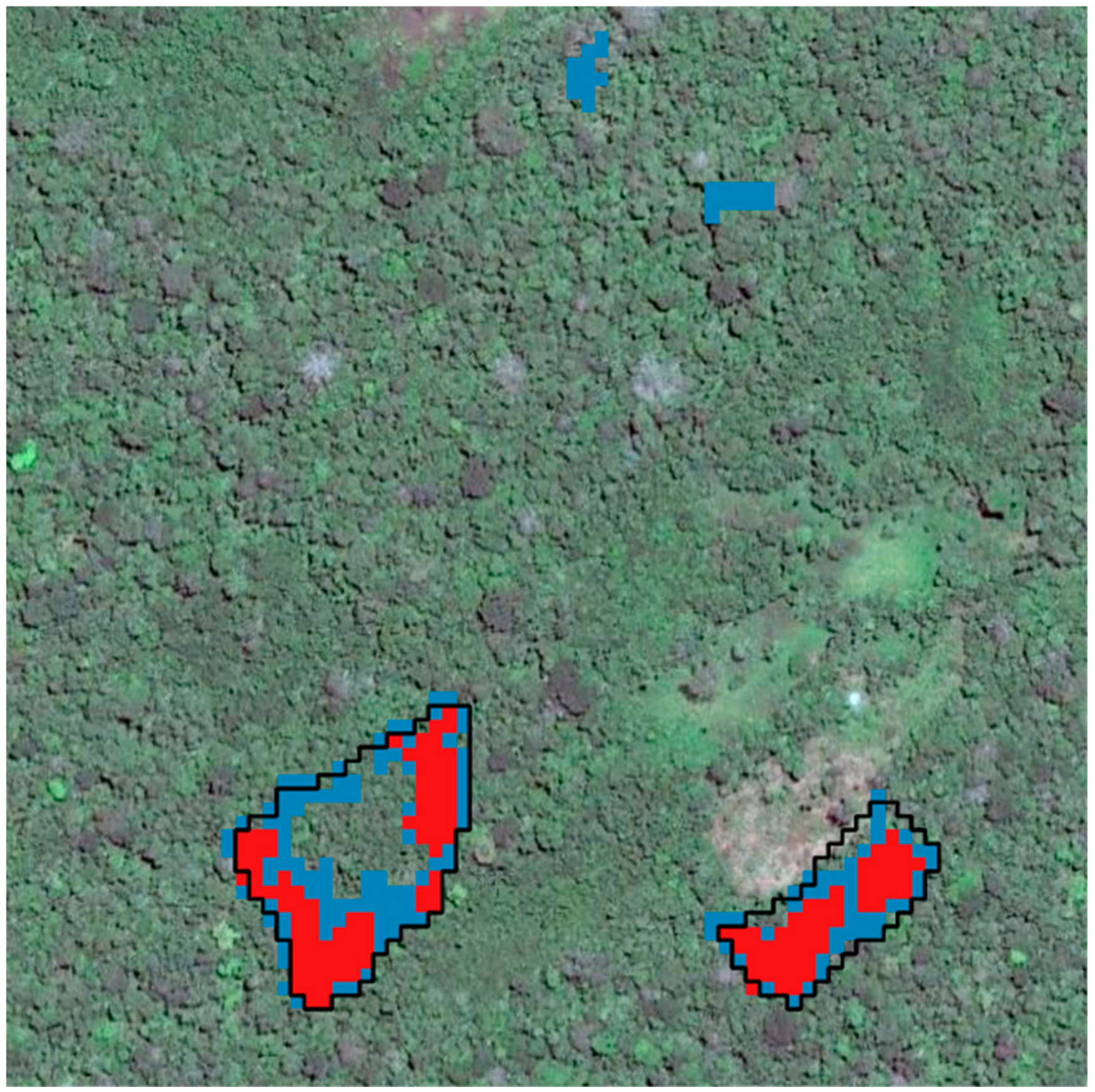
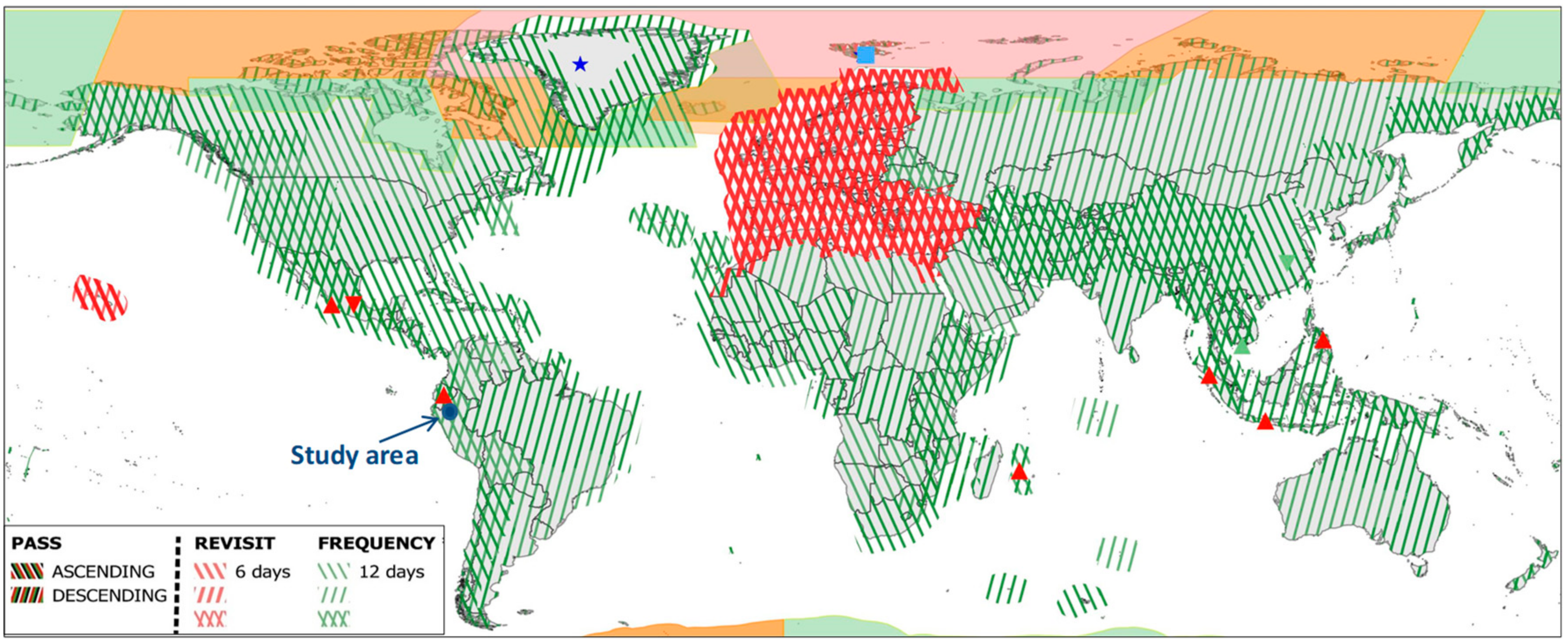
- Orbits: This approach, which detects shadows that appear simultaneously in descending and ascending orbits, allows obtaining a fairly good delineation of deforested patches, especially in the configuration where deforestation appears fully within a larger forest patch (first row of Figure 4). This kind of approach can be implemented in areas where both orbit orientations are available. According to the current S1 observation scenario depicted in Figure 16, these areas concern Europe, the western part of the Americas, eastern Africa, and some parts of Asia. Significant gaps for tropical deforestation include most of the Amazon and Congo river basins, which are covered by one orbit orientation only. In these cases, the detection of shadows will be less complete as only one edge can be detected in the best case, or even none in some configurations (see Figure 4). Therefore, when only one orbit orientation is available, in addition to the detection of shadows that appear, it could be worthwhile investigating also the detection of shadows that disappear, as well as the detection of backscatter increases through double-bounce, to complement the edge detection.
- NRT: The sensitivity of the method was demonstrated for Xa = 3, which represents a delay of about 1 month with a revisit frequency of 12 days. For truly NRT applications, a shorter delay is required, and this parameter involved in the calculation of the RCR needs to be reduced to 1 or 2. This would, however, cause an increase in the false-alarm rate, because of confusions caused by the speckle effect. In that case, an alert system can be proposed with Xa = 1 or Xa = 2, keeping in mind that its results would need to be confirmed/rejected, and complemented afterwards using higher values of Xa.
- Seasonality: In areas where natural forests exhibit a strong seasonality (e.g., deciduous forests) which are reflected in the annual C-band backscatter profiles, this seasonality should be taken into account in the calculation of the RCR. For example, in the calculation of Ma and Mb, γ0j should be replaced by γ0j − tj, where tj represents the mean temporal backscatter trend of natural forests, which can be retrieved from the archived S1 time series over selected undisturbed forested pixels.
- Synergies with other sensors: The Sentinel era offers a unique opportunity to exploit the synergies between optical and SAR sensors. Whether the approach based on Sentinel-1 described in this study will be sufficient in itself to reach operational levels remains to be demonstrated, but it anyway has a strong potential to improve current and future deforestation monitoring systems, which rely mostly on optical imagery. As the continuity of the Sentinel-1 and -2 sensors are guaranteed until at least 2030, investigating, more thoroughly, the synergies between both kinds of sensors would be a well-invested effort. The S1-based approach can also be applied to future high-resolution SAR systems operating with high repetition, in particular, the future L-band NASA-ISRO Synthetic Aperture Radar (NISAR) sensor that is planned for launch in 2020–2021.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Whittle, M.; Quegan, S.; Uryu, Y.; Stüewe, M.; Yulianto, K. Detection of tropical deforestation using ALOS-PALSAR: A Sumatran case study. Remote Sens. Environ. 2012, 124, 83–98. [Google Scholar] [CrossRef]
- Van der Werf, G.R.; Morton, D.C.; DeFries, R.S.; Olivier, J.G.J.; Kasibhatla, P.S.; Jackson, R.B.; Collatz, G.J.; Randerson, J.T. CO2 emissions from forest loss. Nat. Geosci. 2009, 2, 737–738. [Google Scholar] [CrossRef]
- Keenan, R.J.; Reams, G.A.; Achard, F.; de Freitas, J.V.; Grainger, A.; Lindquist, E. Dynamics of global forest area: Results from the FAO Global Forest Resources Assessment 2015. For. Ecol. Manag. 2015, 352, 9–20. [Google Scholar] [CrossRef]
- Le Quéré, C.; Andrew, R.M.; Friedlingstein, P.; Sitch, S.; Pongratz, J.; Manning, A.C.; Korsbakken, J.I.; Peters, G.P.; Canadell, J.G.; Jackson, R.B.; et al. Global Carbon Budget 2017. Earth Syst. Sci. Data 2018, 10, 405–448. [Google Scholar] [CrossRef] [Green Version]
- Achard, F.; Stibig, H.-J.; Eva, H.D.; Lindquist, E.J.; Bouvet, A.; Arino, O.; Mayaux, P. Estimating tropical deforestation from Earth observation data. Carbon Manag. 2010, 1, 271–287. [Google Scholar] [CrossRef] [Green Version]
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High-Resolution Global Maps of 21st-Century Forest Cover Change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef] [PubMed]
- Souza, J.; Siqueira, J.V.; Sales, M.H.; Fonseca, A.V.; Ribeiro, J.G.; Numata, I.; Cochrane, M.A.; Barber, C.P.; Roberts, D.A.; Barlow, J. Ten-Year Landsat Classification of Deforestation and Forest Degradation in the Brazilian Amazon. Remote Sens. 2013, 5, 5493–5513. [Google Scholar] [CrossRef] [Green Version]
- Hansen, M.C.; Krylov, A.; Tyukavina, A.; Potapov, P.V.; Turubanova, S.; Zutta, B.; Ifo, S.; Margono, B.; Stolle, F.; Moore, R. Humid tropical forest disturbance alerts using Landsat data. Environ. Res. Lett. 2016, 11, 034008. [Google Scholar] [CrossRef] [Green Version]
- Verbesselt, J.; Zeileis, A.; Herold, M. Near real-time disturbance detection using satellite image time series. Remote Sens. Environ. 2012, 123, 98–108. [Google Scholar] [CrossRef]
- Sannier, C.; McRoberts, R.E.; Fichet, L.-V.; Makaga, E.M.K. Using the regression estimator with Landsat data to estimate proportion forest cover and net proportion deforestation in Gabon. Remote Sens. Environ. 2014, 151, 138–148. [Google Scholar] [CrossRef]
- Potapov, P.V.; Turubanova, S.A.; Hansen, M.C.; Adusei, B.; Broich, M.; Altstatt, A.; Mane, L.; Justice, C.O. Quantifying forest cover loss in Democratic Republic of the Congo, 2000–2010, with Landsat ETM+ data. Remote Sens. Environ. 2012, 122, 106–116. [Google Scholar] [CrossRef]
- Reiche, J.; Lucas, R.; Mitchell, A.L.; Verbesselt, J.; Hoekman, D.H.; Haarpaintner, J.; Kellndorfer, J.M.; Rosenqvist, A.; Lehmann, E.A.; Woodcock, C.E.; et al. Combining Satellite Data for Better Tropical Forest Monitoring. Available online: https://www.nature.com/articles/nclimate2919 (accessed on 7 March 2018).
- Shimada, M.; Itoh, T.; Motooka, T.; Watanabe, M.; Shiraishi, T.; Thapa, R.; Lucas, R. New global forest/non-forest maps from ALOS PALSAR data (2007–2010). Remote Sens. Environ. 2014, 155, 13–31. [Google Scholar] [CrossRef]
- Mermoz, S.; Le Toan, T. Forest Disturbances and Regrowth Assessment Using ALOS PALSAR Data from 2007 to 2010 in Vietnam, Cambodia and Lao PDR. Remote Sens. 2016, 8, 217. [Google Scholar] [CrossRef]
- Ryan, C.M.; Hill, T.; Woollen, E.; Ghee, C.; Mitchard, E.; Cassells, G.; Grace, J.; Woodhouse, I.H.; Williams, M. Quantifying small-scale deforestation and forest degradation in African woodlands using radar imagery. Glob. Chang. Biol. 2012, 18, 243–257. [Google Scholar] [CrossRef]
- Rignot, E.; Salas, W.A.; Skole, D.L. Mapping deforestation and secondary growth in Rondonia, Brazil, using imaging radar and thematic mapper data. Remote Sens. Environ. 1997, 59, 167–179. [Google Scholar] [CrossRef] [Green Version]
- Lohberger, S.; Stängel, M.; Atwood, E.C.; Siegert, F. Spatial evaluation of Indonesia’s 2015 fire-affected area and estimated carbon emissions using Sentinel-1. Glob. Chang. Biol. 2018, 24, 644–654. [Google Scholar] [CrossRef] [PubMed]
- Reiche, J.; Hamunyela, E.; Verbesselt, J.; Hoekman, D.; Herold, M. Improving near-real time deforestation monitoring in tropical dry forests by combining dense Sentinel-1 time series with Landsat and ALOS-2 PALSAR-2. Remote Sens. Environ. 2018, 204, 147–161. [Google Scholar] [CrossRef]
- Attema, E.P.W.; Ulaby, F.T. Vegetation modeled as a water cloud. Radio Sci. 1978, 13, 357–364. [Google Scholar] [CrossRef]
- Bouman, B.A.M.; Hoekman, D.H. Multi-temporal, multi-frequency radar measurements of agricultural crops during the Agriscatt-88 campaign in The Netherlands. Int. J. Remote Sens. 1993, 14, 1595–1614. [Google Scholar] [CrossRef]
- Karam, M.A.; Fung, A.K.; Lang, R.H.; Chauhan, N.S. A microwave scattering model for layered vegetation. IEEE Trans. Geosci. Remote Sens. 1992, 30, 767–784. [Google Scholar] [CrossRef] [Green Version]
- Schmugge, T.J. Remote Sensing of Soil Moisture: Recent Advances. IEEE Trans. Geosci. Remote Sens. 1983, GE-21, 336–344. [Google Scholar] [CrossRef]
- Kalamandeen, M.; Gloor, E.; Mitchard, E.; Quincey, D.; Ziv, G.; Spracklen, D.; Spracklen, B.; Adami, M.; Aragão, L.E.; Galbraith, D. Pervasive Rise of Small-scale Deforestation in Amazonia. Sci. Rep. 2018, 8, 1600. [Google Scholar] [CrossRef] [PubMed]
- Bruniquel, J.; Lopes, A. Multi-variate optimal speckle reduction in SAR imagery. Int. J. Remote Sens. 1997, 18, 603–627. [Google Scholar] [CrossRef]
- Quegan, S.; Yu, J.J. Filtering of multichannel SAR images. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2373–2379. [Google Scholar] [CrossRef]
- Villard, L.; Borderies, P. Backscattering Border Effects for Forests at C-band. PIERS Online 2007, 3, 731–735. [Google Scholar] [CrossRef]
- Simard, M.; Pinto, N.; Fisher, J.B.; Baccini, A. Mapping forest canopy height globally with spaceborne lidar. J. Geophys. Res. Biogeosci. 2011, 116, G04021. [Google Scholar] [CrossRef]
- Joshi, N.; Mitchard, E.T.; Woo, N.; Torres, J.; Moll-Rocek, J.; Ehammer, A.; Collins, M.; Jepsen, M.R.; Fensholt, R. Mapping dynamics of deforestation and forest degradation in tropical forests using radar satellite data. Environ. Res. Lett. 2015, 10, 034014. [Google Scholar] [CrossRef] [Green Version]
- Ribbes, F.; Le Toan, T. Rice field mapping and monitoring with RADARSAT data. Int. J. Remote Sens. 1999, 20, 745–765. [Google Scholar] [CrossRef]
- Le Toan, T.; Ribbes, F.; Wang, L.-F.; Floury, N.; Ding, K.-H.; Kong, J.A.; Fujita, M.; Kurosu, T. Rice crop mapping and monitoring using ERS-1 data based on experiment and modeling results. IEEE Trans. Geosci. Remote Sens. 1997, 35, 41–56. [Google Scholar] [CrossRef]
- Bouvet, A.; Le Toan, T. Use of ENVISAT/ASAR wide-swath data for timely rice fields mapping in the Mekong River Delta. Remote Sens. Environ. 2011, 115, 1090–1101. [Google Scholar] [CrossRef] [Green Version]
- Motohka, T.; Shimada, M.; Uryu, Y.; Setiabudi, B. Using time series PALSAR gamma nought mosaics for automatic detection of tropical deforestation: A test study in Riau, Indonesia. Remote Sens. Environ. 2014, 155, 79–88. [Google Scholar] [CrossRef]
- Rignot, E.J.M.; Van Zyl, J.J. Change detection techniques for ERS-1 SAR data. IEEE Trans. Geosci. Remote Sens. 1993, 31, 896–906. [Google Scholar] [CrossRef] [Green Version]
- Tanase, M.A.; Aponte, C.; Mermoz, S.; Bouvet, A.; Le Toan, T.; Heurich, M. Detection of windthrows and insect outbreaks by L-band SAR: A case study in the Bavarian Forest National Park. Remote Sens. Environ. 2018, 209, 700–711. [Google Scholar] [CrossRef]
- Edelsbrunner, H.; Kirkpatrick, D.; Seidel, R. On the shape of a set of points in the plane. IEEE Trans. Inf. Theory 1983, 29, 551–559. [Google Scholar] [CrossRef]
- Olofsson, P.; Foody, G.M.; Herold, M.; Stehman, S.V.; Woodcock, C.E.; Wulder, M.A. Good practices for estimating area and assessing accuracy of land change. Remote Sens. Environ. 2014, 148, 42–57. [Google Scholar] [CrossRef] [Green Version]
- Bouvet, A.; Toan, T.L.; Floury, N.; Macklin, T. An End-to-End Error Model for Classification Methods Based on Temporal Change or Polarization Ratio of SAR Intensities. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3521–3538. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. Samples | Mean Size (ha) | Min/Max Size (ha) | Total Area (ha) | |
|---|---|---|---|---|
| Deforested (manual) | 94 | 2.09 ± 3.09 | 0.33/22.39 | 196 |
| Deforested (automatic) | 901 | 0.40 ± 0.49 | 0.05/4.85 | 362 |
| Undisturbed | 32 | 63.33 ± 55.53 | 1.82/197.68 | 2027 |
| Reference | ||||
|---|---|---|---|---|
| Disturbed | Not Disturbed | UA (%) | ||
| Detection | Disturbed | 29,082 | 162 | 99.4 |
| Not disturbed | 7155 | 202,491 | 96.6 | |
| PA (%) | 80.3 | 99.9 | ||
| Reference | ||||
|---|---|---|---|---|
| Disturbed | Not Disturbed | UA (%) | ||
| Detection | Disturbed | 14,559 | 18 | 99.9 |
| Not disturbed | 21,678 | 202,635 | 90.3 | |
| PA (%) | 40.2 | 100 | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bouvet, A.; Mermoz, S.; Ballère, M.; Koleck, T.; Le Toan, T. Use of the SAR Shadowing Effect for Deforestation Detection with Sentinel-1 Time Series. Remote Sens. 2018, 10, 1250. https://doi.org/10.3390/rs10081250
Bouvet A, Mermoz S, Ballère M, Koleck T, Le Toan T. Use of the SAR Shadowing Effect for Deforestation Detection with Sentinel-1 Time Series. Remote Sensing. 2018; 10(8):1250. https://doi.org/10.3390/rs10081250
Chicago/Turabian StyleBouvet, Alexandre, Stéphane Mermoz, Marie Ballère, Thierry Koleck, and Thuy Le Toan. 2018. "Use of the SAR Shadowing Effect for Deforestation Detection with Sentinel-1 Time Series" Remote Sensing 10, no. 8: 1250. https://doi.org/10.3390/rs10081250
APA StyleBouvet, A., Mermoz, S., Ballère, M., Koleck, T., & Le Toan, T. (2018). Use of the SAR Shadowing Effect for Deforestation Detection with Sentinel-1 Time Series. Remote Sensing, 10(8), 1250. https://doi.org/10.3390/rs10081250