1. Introduction
With the thriving development of high spatial resolution sensors, a set of high-resolution earth observation satellites have been launched, e.g., the IKONOS, QuickBird, OrbView, WorldView-1/2/3, GeoEye, and Pleiades-1/2. An increasing number of metric and sub-metric resolution remote sensing images are currently available, which have been widely used in many applications, such as urban planning, disaster monitoring, precision agriculture, etc. [
1,
2]. High spatial resolution (HSR) remote sensing images contain abundant spectral and geometric information. As a fundamental process, HSR image segmentation is essential for such image analysis [
3,
4,
5]. Image segmentation refers to the process of assigning a label to every pixel in an image such that pixels with the same label share certain visual characteristics [
6]. The result of image segmentation is a set of segments (sets of pixels) that collectively cover the entire image. Pixels in the same region are similar with respect to some characteristics or computed properties such as color, intensity, and texture. Adjacent regions are significantly different with respect to the same characteristics [
6]. The goal of segmentation is to simplify or change the representation of an image into something that is more meaningful and easier to analyze [
6]. In the literature, various of image segmentation algorithms have been developed according to different requirements and conditions which can be mainly divided into two categories: pixel-based and object-based image segmentation (OBIA) [
7]. The most important difference between them is the basic unit used for comparison in the process of image analysis.
Many traditional pixel-based image segmentation algorithms have emerged as state-of-the-art systems that have been widely adopted in the field, namely, the watershed transform segmentation (WTS) [
8,
9], the threshold method [
10], the mean shift algorithm (MS) [
11], and graph-based methods [
12]. Hybrid techniques using a mix of the methods above have also been popular. However, pixel-based approaches have difficulty obtaining sufficiently good results. Unlike medium- and low-resolution images, an HSR image with abundant details causes the problem of excessive heterogeneity to occur, and ground objects of the same category may reflect excessively different spectral features. As a result, the spectral separation of different categories is more difficult [
13], and conventional pixel-based segmentation methods are not efficient enough in such cases.
Compared with pixel-based methods, OBIA techniques tend to believe that an object is the optimal image analysis unit for mapping landscape, which is composed of a group of pixels in an image that contain richer information, including the spectrum, texture, shape, and spatial relationships with adjacent objects [
14]. So far, various OBIA methods have been proposed by different scholars in remote sensing fields [
15,
16]. The multiresolution segmentation (MRS) method integrated in commercial software, eCognition9, adopts an iterative region merging approach based on local criteria. It makes good use of the geometry and spectral information of the target [
17] and has been successfully used for HSR image segmentation [
3,
18]. Fu et al. [
19] and Banerjee et al. [
20] both used the initial image over-segmentation and region grouping processes to obtain the segmentation results of the HSR remote sensing image. This type of hybrid segmentation technique, which clusters the regions instead of image pixels, greatly reduces the sensitivity to noise and enhances the overall segmentation performance.
More recently, due to the ability to produce uniform and homogeneous regions that preserve most of the useful information, superpixel technique have started to be widely applied to the field of HSR remote sensing image segmentation [
21,
22,
23]. The concept of the superpixel was first proposed by Ren and Malik [
24] in 2003. A superpixel refers to an irregular pixel block with some visual significance, made up of neighboring pixels with similar texture, color, brightness, etc. Today, there are nearly 30 kinds of state-of-the-art superpixel algorithms available to the public [
25]. These algorithms can be broadly divided into two categories: one based on gradient ascent methods, such as the mean shift algorithm [
11], the watershed transform algorithm [
8,
9], and the simple linear iterative clustering (SLIC) algorithm [
26], and the other is based on the graph theory, such as the normalized cuts algorithm [
27] and efficient graph-based image segmentation (EGB) [
12]. Among these choices, the SLIC [
26] method has a good balance between accuracy and efficiency. It is very suitable for HSR image over-segmentation due to the advantage of speed, and it generates ideal superpixels that are compact, have uniform approximation, and adhere well to HSR image boundaries. The SLIC algorithm has been widely applied [
28,
29,
30].
However, considering that remote sensing images are always large, first of all, whether in pixel-based, object-oriented, or superpixel-based methods, HSR remote sensing image segmentation process can be very time consuming. Second, in the superpixel-based segmentation method, the accuracy and efficiency of the initial image over-segmentation and region merging strategy are two important factors that determine the HSR image segmentation results. The typical bottom-up approaches (such as mean shift algorithm) always process from pixels and are more likely to result in lots of trivial segments, causing great difficulty in post-processing. The third issue is how to find the optimal segmentation scale and extract the best feature (spectrum, texture, shape, etc.) combination. These difficulties above are still bottlenecks in HSR remote sensing image segmentation methods. Csillik [
30] showed how to efficiently partition an image into objects by using SLIC superpixels as the starting point for MRS. They also showed how the SLIC superpixels could be used for fast and accurate thematic mapping. Ren et al. [
31] proposed the graphic processing units (GPU) version of the SLIC algorithm which greatly improved the speed of initial segmentation and provided a good choice for large-scale HSR remote sensing images analysis. Gu et al. [
32] and Hu et al. [
33] greatly improved the segmentation efficiency of remote sensing images through the GPU parallel method. Sun et al. [
34] presented a region merging method for post-earthquake VHR image segmentation by combining an adaptive spectral–spatial descriptor with a dynamic region merging strategy (ADRM) which successfully detected objects scattered globally in a post-earthquake image. Hu et al. [
35] and Zhong et al. [
36] obtained good segmentation result by using the integrated multifeature and multiscale segmentation method. Inspired by both Gestalt-laws optimization and background connectivity theory, Yan et al. [
37] proposed Gestalt-laws guided optimization and visual attention-based refinement (GLGOV) as a cognitive framework to combine bottom-up and top-down vision mechanisms for unsupervised saliency detection. Within the framework, it interpreted gestalt-laws of homogeneity, similarity, proximity and figure and ground in association with color, spatial contrast at the level of regions and objects to produce feature contrast map. Wang et al. [
29] proposed an optimal segmentation of the HSR remote sensing image by combing the SMST algorithm.
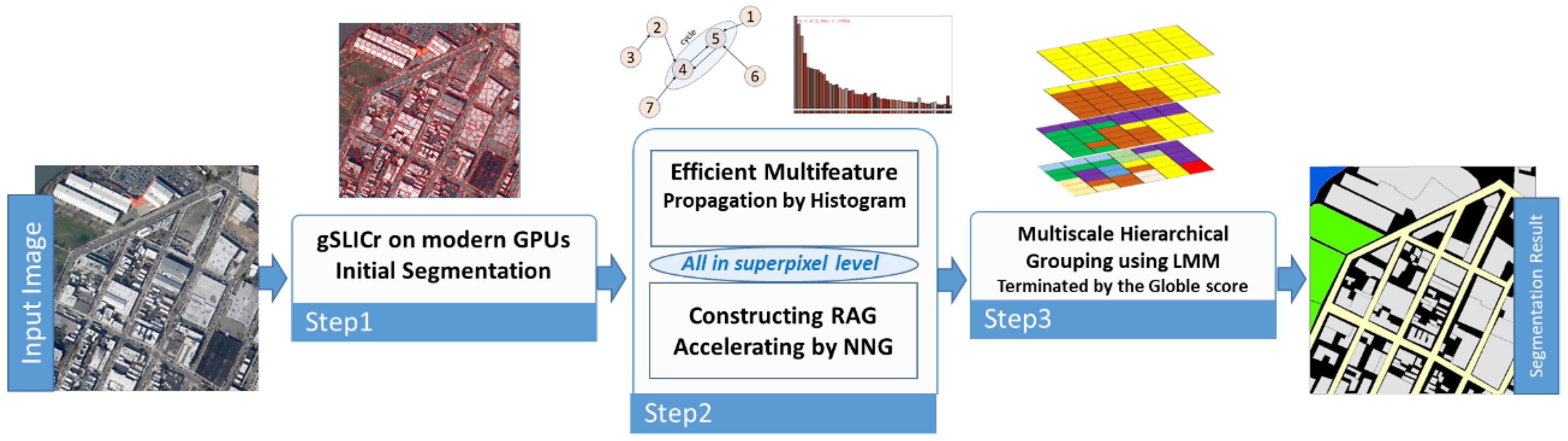
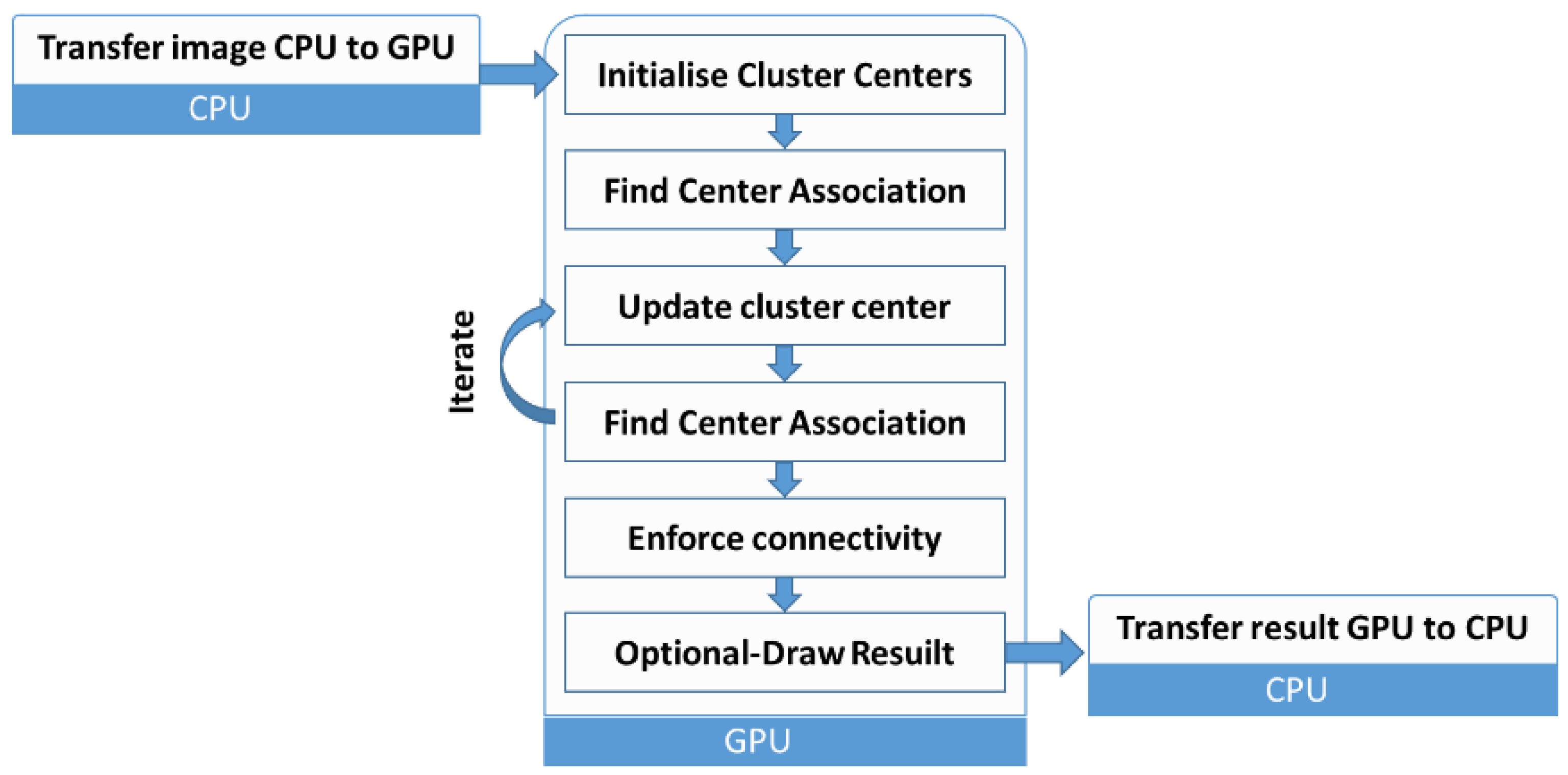
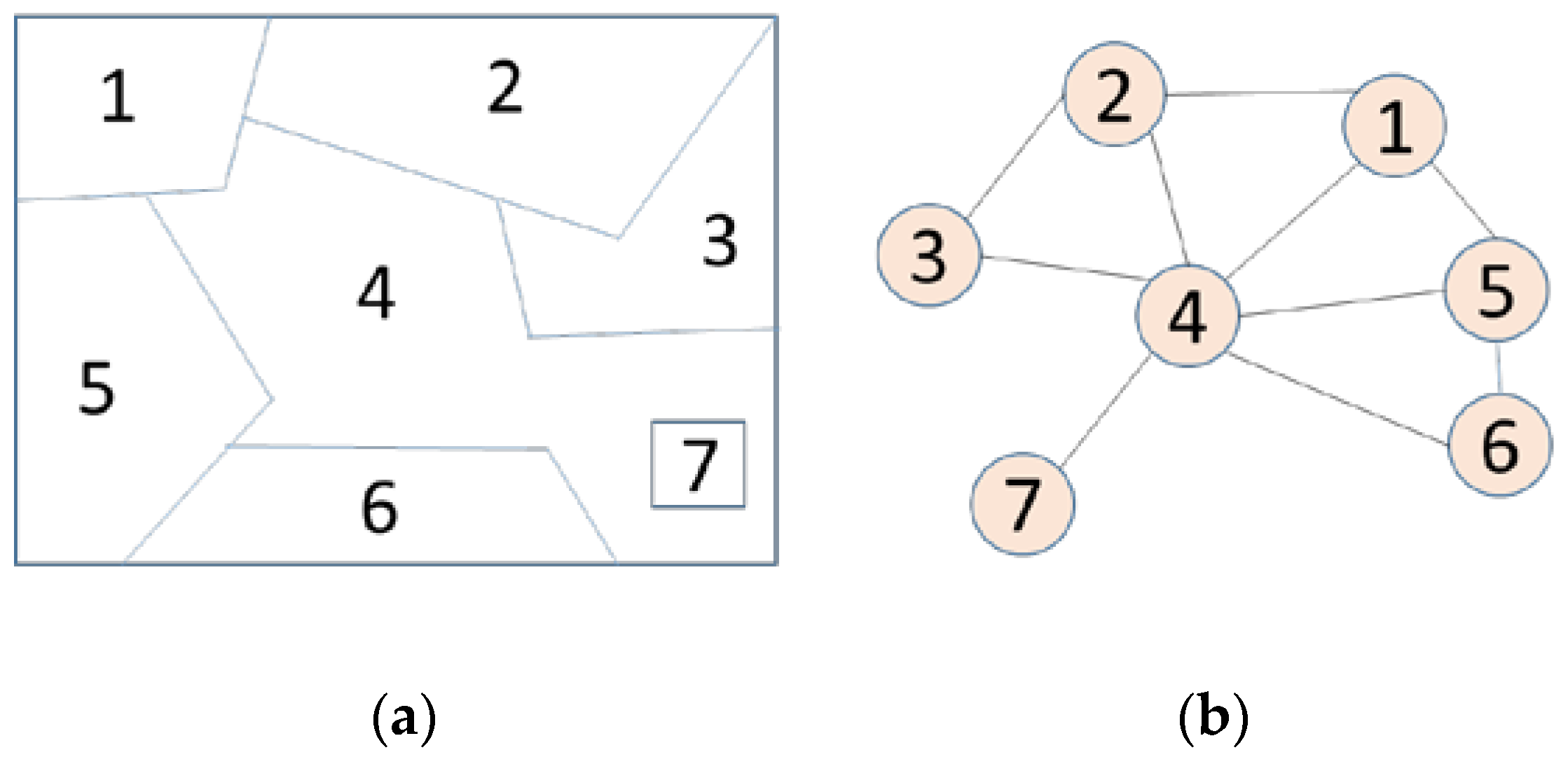
By summarizing the above research, we are trying to further improve the speed and effect of HSR remote sensing image segmentation through GPUs, superpixels, the region merging strategy and multifeature integration. In this paper, we aim to develop a rapid HSR image segmentation system to produce high quality image segments for OBIA. We propose a multiscale and multifeature hierarchical segmentation method (MMHS) for HSR imagery that integrates the superiorities of superpixels and the hierarchical merging method and avoids the disadvantages of these pixel-based methods. In MMHS, our effort starts with a GPU version of the simple linear iterative clustering (SLIC) algorithm [
26,
31] to quickly obtain initial seed regions (superpixels) by performing over-segmentation. As geometric information is crucial for HSR imagery, multiple features including the spectral, texture, and structural features are taken into consideration to better represent the characteristics of the superpixels. A hierarchical stepwise optimized region merging process (HSWO) [
21] using mutual optimal strategy is then performed based on the distance metric to output a set of hierarchical segmentations. Note that to maintain the efficiency of our method, we design image features that are accelerated by histograms and are appropriate for region merging computing. The algorithm can quickly calculate and capture all scales, and we use a global score [
38] that reflects intra- and inter-segment heterogeneity information to evaluate the optimal scale selection. The efficiency of the proposed algorithm is verified with six HSR datasets: two aerial orthophoto images and a QuickBird image. By comparing the results with those of other state-of-the-art algorithms, i.e., the WTS algorithm, MS algorithm, and MRS algorithm, it is shown that the proposed MMHS algorithm shows promising performance in terms of both visualization and quantitative evaluation.
There are three main contributions of this work:
In this paper, we design a fast and reliable segmentation framework by using the GPU version of a superpixel, the nearest neighbors graph, and carefully designing the image features which can be propagated directly at the superpixel level.
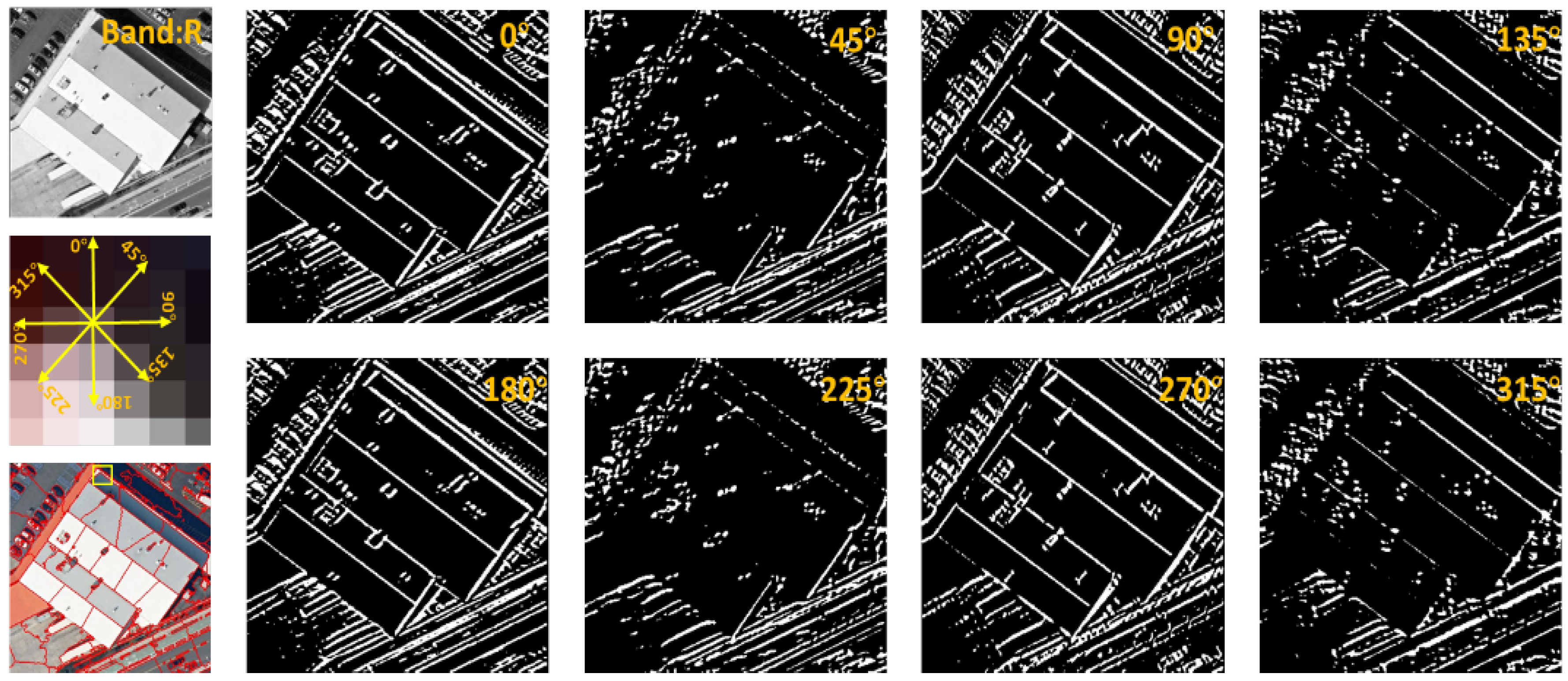
We also carefully design the multifeature integration of colors, textures, and edges. Each feature is integrated with weighting factors to increase the differences between superpixels. We adjust the corresponding weights to adapt to different HSR remote sensing images.
Our work attempts to address the selection of optimal scale problem by using a novel global score [
38] that reflects intra- and inter-segment heterogeneity information.
The remainder of the paper is organized as follows. In
Section 2, the details of the proposed MMHS segmentation method are described. Then, in
Section 3, we perform two sets of experiments to evaluate the performance of the proposed method and compare it with the visual contrast and three quantitative indicators. The discussion and conclusions are given in
Section 4 and
Section 5, respectively.
3. Experiments and Analysis
Here, we describe the testing the proposed MMHS algorithm on six HSR remote sensing datasets from the New York State High Resolution Digital Orthoimagery Program (NYSDOP) and the ISPRS Potsdam Semantic Labeling dataset [
43]. In the first experiment, we tested the gSLICr, which is a CUDA-based GPU version SLIC method [
31], with well-known image over-segmentation algorithms—the efficient graph-based image segmentation (EGB) method and the SLIC algorithm—to check the effect and efficiency of the initial superpixel segmentation. In the second experiment, we compared three state-of-the-art algorithms: the multiresolution segmentation algorithm (MRS) in the commercial software eCognition9; the mean shift algorithm (MS); and the watershed transform segmentation algorithm (WTS). All algorithms were programmed by C++ and tested on a Windows 10 64-bit with Intel CPU i5-6500 at 3.2 GHz and an NVIDIA GeForce GTX 1060 6 GB. There are several free parameters in the proposed MMHS algorithm: the weight of the color
, the texture (
), and the boundary constraint parameters
and we present the results of tests of their sensitivity in
Section 3.4. In
Section 3.5, we present the analysis of the effects of segmentation scale selection and determine the optimal number of segments for experimental images. The WTS and MS algorithms came from the open source image processing library OpenCV.
3.1. Description of Experimental Datasets
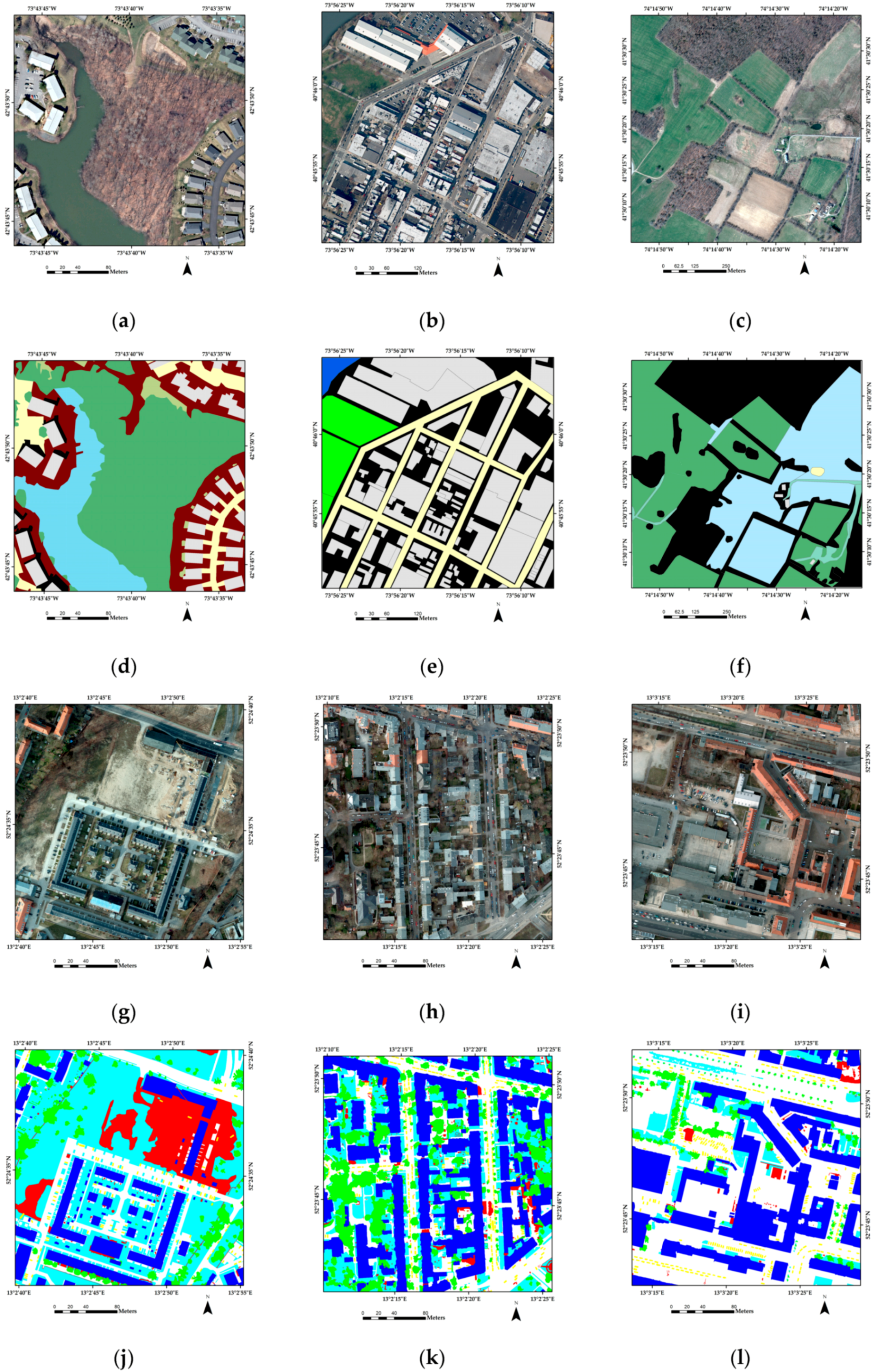
The experimental dataset from NYSDOP contained a set of HSR images in the US state of New York, as shown in
Table 2 and
Figure 7, including QuickBird and aerial images with spatial resolution ranges from 0.6 m (T1) to 0.3 m (T2 and T3), respectively. Images T4, T5, and T6 came from the ISPRS dataset [
43]. The ISPRS Potsdam dataset is an open benchmark dataset which consists of 38 ortho-rectified aerial IRRGB images (6000 × 6000 px), with a 5 cm spatial resolution and corresponding ground truth.
Image T1 was an urban residential area located in Albany County. Image T2 covered a typical urban landscape with dense buildings, criss-crossing roads, and a few grassland spaces in Manhattan, New York City. Image T3 recorded a rural area with spatial dimensions of 6000 × 6000 pixels in Montgomery County. Images T1 and T2 were 2324 × 2324 and 2979 × 2979, respectively and contained pixels in four spectral bands: red, green, blue, and near-infrared. Images T4, T5, and T6 were from the urban area of Potsdam, Germany. Their color composite images are shown in
Figure 7a–l, which are the corresponding benchmark images.
To fully evaluate the computational efficiency and segmentation accuracy of the proposed algorithm under different conditions, we used two different sources of HSR images covering a variety of features, such as buildings, roads, vegetation, grasslands, and lakes. Each experimental image contained monotonous and intensely mixed complex spectra, textures, and shape features.
3.2. Evaluation Criteria and Experiment Setup
For the purpose of evaluating our method more objectively, the evaluation indices principle used was different from our segmentation algorithm. We used the supervised and unsupervised segmentation assessment methods. The segmentation index was evaluated from many aspects, such as under-segmentation, over-segmentation, shape, heterogeneity and homogeneity. We evaluated the segmentation results for all experiments from the following seven indicators of three types: first, the normalized weighted variance (wVar), the normalized global Moran index (MI), and the global score (GS) [
38]; second, the potential segmentation error (PSE), the number of segments ratio (NSR), and the Euclidean distance 2 (ED2) [
44]; and third, the object level consistency error (OCE) [
45]. They are all shown in
Table 3.
The global score (GS) is calculated by adding the normalized weighted variance (wVar) and the normalized global Moran index MI. The variance of the segmented region can reflect the relative degree of homogeneity of the region and is often chosen as the intra-segment goodness measure. wVar is a global calculation based on the area of the segmented region which makes large segments have more impact on global homogeneous. Global Moran’s I is a spatial autocorrelation measure that can characterize the degree of similarity between an area and its neighbors and can be used as a good indicator of segmentation quality assessment. Brian Johnson [
38] chose it as the inter-segment global goodness measure in the calculation of the global score (GS). Low Moran’s I values indicate high inter-segment heterogeneity, which is desirable for image segmentation. So, in theory, a good segmentation result should have a low global score.
The Euclidean distance 2 (ED2) is a composite index that considers both geometric and arithmetic discrepancies proposed by Liu et al. [
44]. He improved the Euclidean distance 1 based on this under-segmentation (US) indicator and proposed the Potential Segmentation Error (PSE) and Number of Segments Ratio (NSR). The PSE is the ratio between the total area of under-segments and the total area of reference polygons. The range of the PSE is [0, +∞]. When the best value is 0, the reference object does not have under-segmentation. NSR is defined as the absolute difference in the number of reference polygons and number of corresponding segments divided by the number of reference polygons. When the NSR value is 0, all reference objects and matching objects are in one-to-one correspondence, and the segmentation effect is the best. The larger the NSR value is, the more the one-to-many or many-to-one matching quantity relationships there are, indirectly indicating that the over-segmentation or under-segmentation phenomenon is more serious. ED2 is calculated by the combination of PSE and NSR. In a two-dimensional PSE–NSR space, the ED2 index is the most reliable when NSR and PSE are the same magnitude, and a small ED2 value can represent good segmentation quality.
By studying two variants of the martin error measure, the global consistency error (GCE), and the local consistency error (LCE), the object-level consistency error (OCE) was proposed by Polak [
45]. By comparing the size, shape, and position at the object level on the segmented image and the ground truth image, the OCE can fairly penalize both over- and under-segmentation. At the same time, it retains the properties of being normalized, symmetric, and scale invariant, respectively.
In the algorithm comparison experiments, we set corresponding parameters for different algorithms to obtain fine precision and speed. In Experiment 1, we chose the first Albany QuickBird HSR image as our experimental data. The parameters of EGB algorithm were set as sigma = 0.5,
K = 500, and min = 50. The SLIC segmentation parameters were as follows: number of superpixels = 1000, compactness factor = 20, and number of iterations = 10. The parameters of the gSLICr algorithm were as follows: number of superpixels = 1000, compactness factor = 0.6, and number of iterations = 10. In the second experiment, we compared the segmentation algorithms on these three HSR datasets. The parameters of each algorithm on the corresponding data set included eCognition MRS (FNEA) parameters of shape = 0.1/0.2/0.3/0.2/0.1/0.2, compactness = 0.7/0.5/0.5/0.5/0.6/0.5, and scale = 300/500/450/1300/1500/1400. The parameters of the MS algorithm were set as follows: spatial bandwidth = 14/10/8/7/10/7 and color bandwidth = 4/5/46.5/8/4.5. For our segmentation, the parameters were α = 0.4/0.5/0.4/0.4/0.5/0.4, β = 0.6/0.4/0.6/0.6/0.5/0.6, and
0.5/0.4/0.4. The numbers of segments were 74, 105, 84, 93 and 87, respectively. The above parameters of MRS and MS were set by the results of many experiments and experience. The three parameters of our algorithm and the optimal number of segments were obtained by the analyses in
Section 3.4 and
Section 3.5, respectively.
3.3. Comparative Results and Analysis
3.3.1. First Experiment
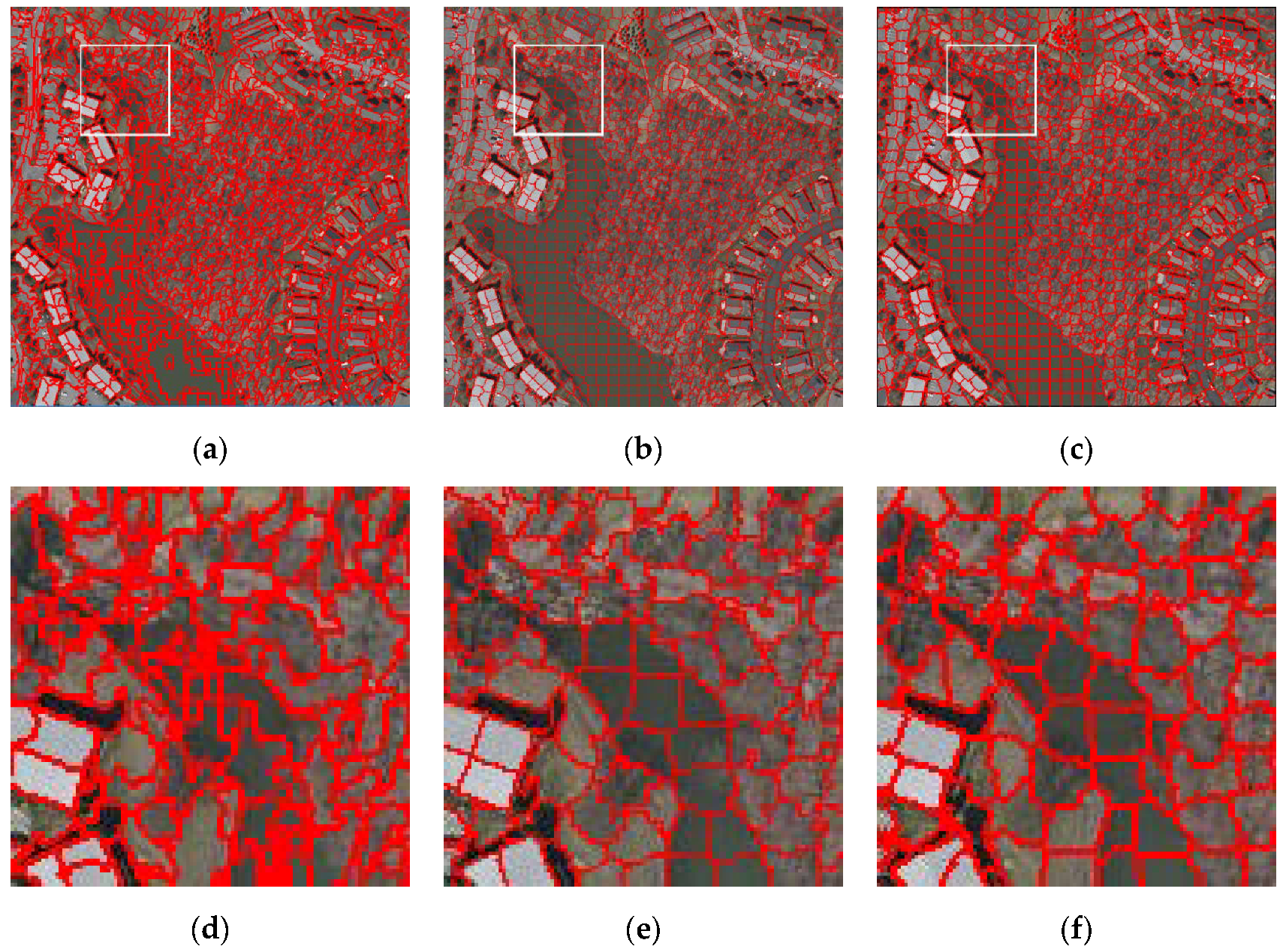
Experiment 1 was the initial over-segmentation experiment conducted on the Albany QuickBird HSR image.
Figure 8a–c and
Table 4 display the over-segmentation results and the number of segments as well as the runtimes of EGB, SLIC and gSLICr.
By comparing the three algorithms from the results shown in
Table 5, it can be observed that the runtimes of EGB, SLIC, gSLICr were 142 s, 187.5 s, and 0.11 s, respectively. At the same time, the numbers of segments were 1498, 1500 and 1500, respectively. Each over-segmented object was a superpixel. The fewer the number of superpixels, the lower the consumption time was. It can be clearly seen that the gSLICr method had the highest efficiency when compared to the EGB and SLIC methods, and with an equal number of superpixels, the time consumption was only one thousandth of that of the former. As shown in
Figure 8a–c, the superpixels generated by the three methods all had good boundary adhesion. Compared with the EGB method, the superpixels generated by the SLIC and gSLICr methods were more compact and tidy. The SLIC superpixels and gSLICr superpixels produced similar results. As shown by the enlargement of
Figure 8d–f, the algorithm EGB was greatly affected by the speckle noise which caused the shape of the superpixel to be more cluttered and there was no boundary of the surface objects attached. The SLIC algorithm had a uniform superpixel shape and good boundary adhesion. The gSLICr method not only inherits the advantages of the SLIC, but the local detail of the segmentation is also better. For example, in
Figure 8f, the remains of the smaller region still have a well attached boundary. Therefore, the gSLICr algorithm not only has great advantages in regard to time performance, but it also performs better than the EGB and SLIC algorithms in terms of number of superpixels, boundary adhesion, and noise resistance.
3.3.2. Second Experiment
The comparison of MMHS with other segmentation methods was conducted on the six test images: the Albany QuickBird image (T1), the Manhattan aerial image (T2), the Montgomery aerial image (T3), and three Potsdam aerial images (T4, T5, T6).
Figure 9,
Figure 10 and
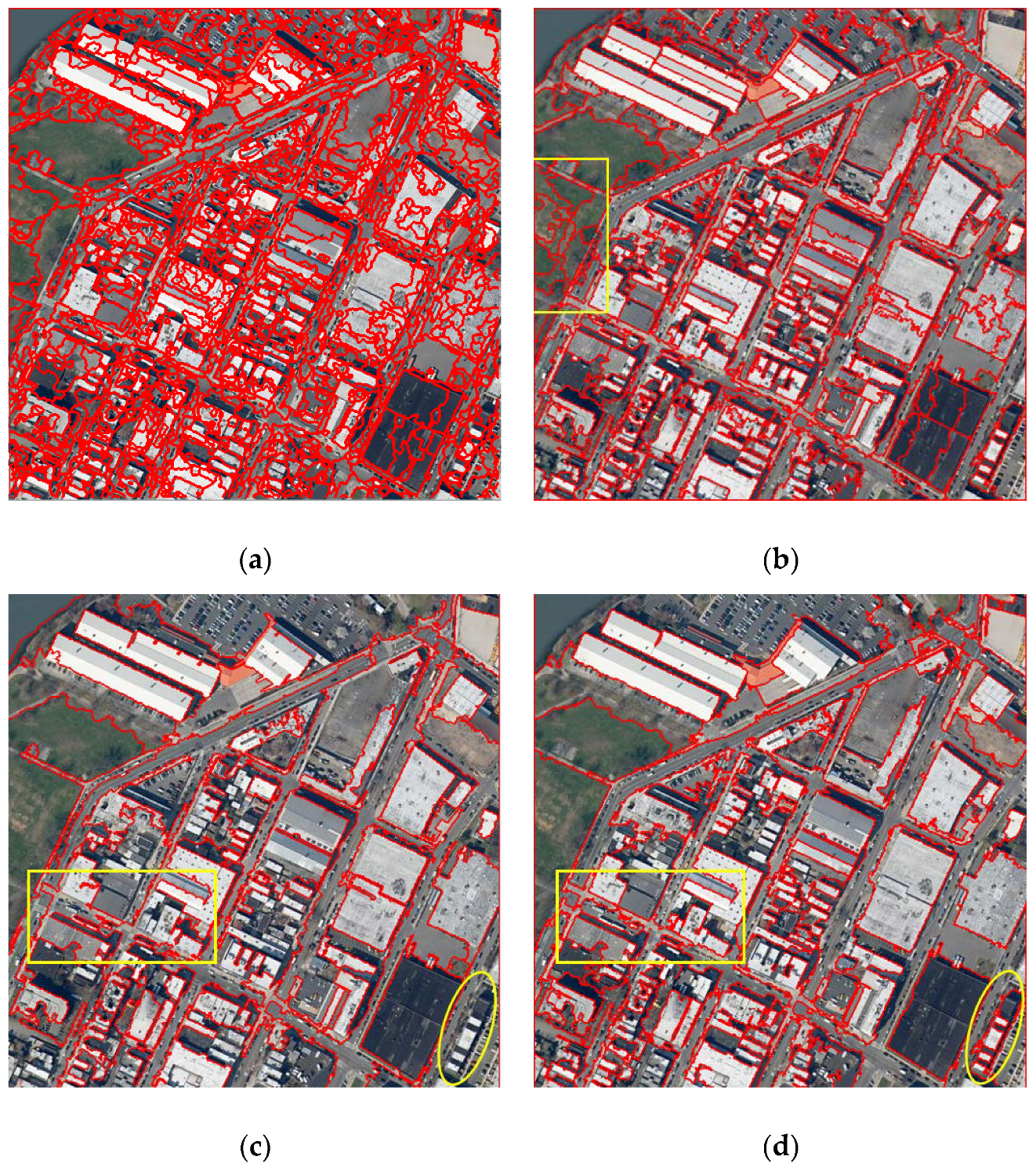
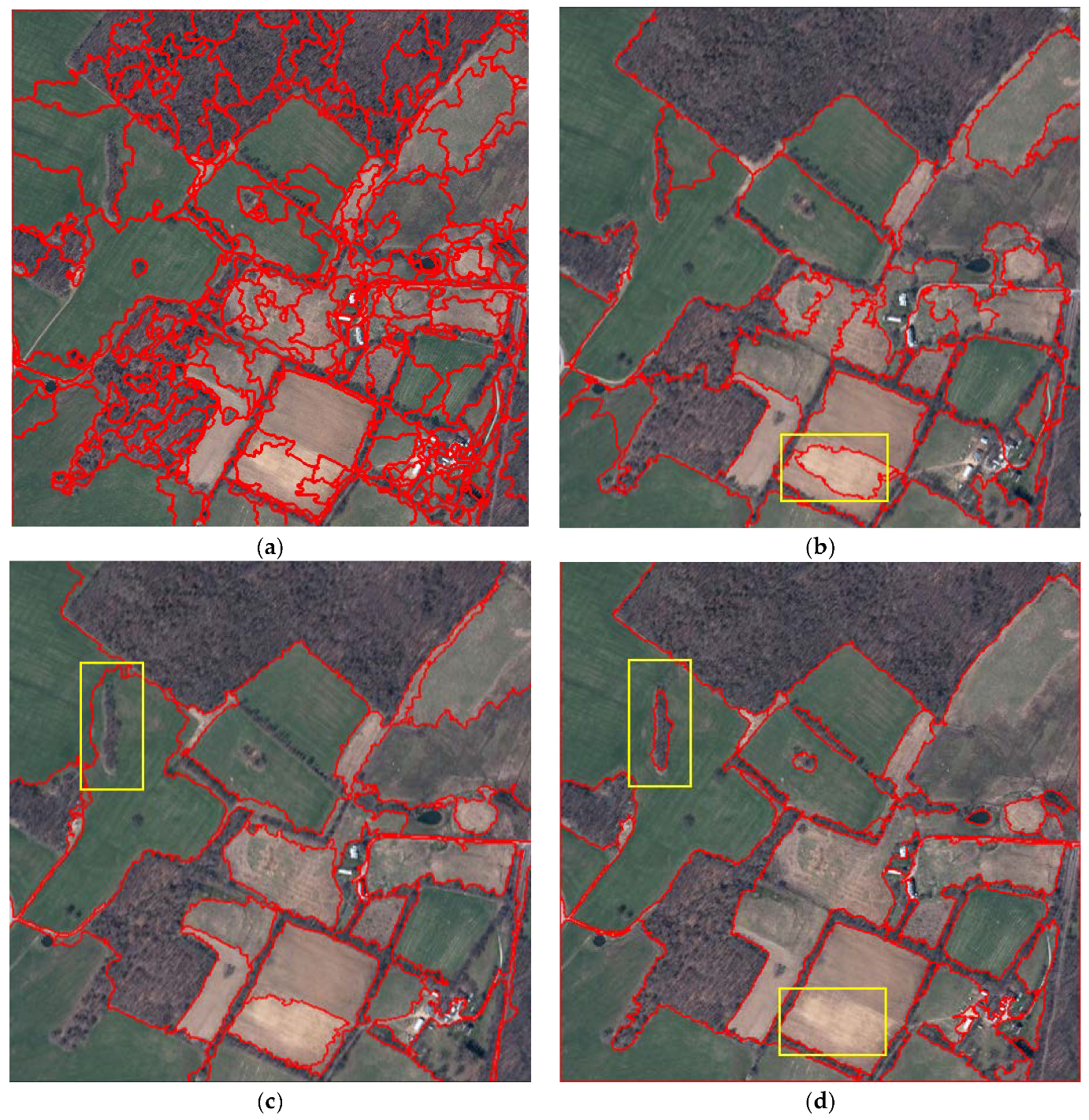
Figure 11 show the segmentation results of WT, MS, MRS, MHS and MMHS, respectively. The red lines represent the boundaries of segmentation.
Table 5,
Table 6 and
Table 7 display the quantitative assessment results: the segmentation runtime, weighted variance (wVar), Moran index (MI), the global score (GS), the potential segmentation error (PSE), the number of segments ratio (NSR), the Euclidean distance 2 (ED2), and the object-level consistency error (OCE) for WT, MS, MRS and MHS. Our algorithm results are shown in bold.
The segmentation results of T1 produced by the four methods are presented in
Figure 9a–d. According to a visual assessment, it can be seen that our MMHS method had better results when compared with other three approaches. The WTS algorithm produced large-scope over-segmentation on the entire image range. At the same time, the MS and MRS were over-segmented in the forest and lake areas, respectively. This is because these segmentation method algorithms based on local changes between neighboring pixels are sensitive to boundary changes in areas where the internal spectrum and gradients change significantly. The MS and MRS algorithms introduce spatial and shape parameters, respectively. Although partial over-segmentation is reduced, it is difficult to achieve optimal segmentation in the overall result. Therefore, in
Figure 9b, the MS algorithm led to under-segmentation in both the upper left road area and in the lower right road area. We proposed the superpixel-based MMHS algorithm, which partly overcomes the problem of over-segmentation in the pixel-based methods. The reason for this may be that the superpixels are much less affected by the local error variation, and because the MMHS has the flexibility to choose the best segmentation result.
The quantitative evaluation results of T1 are shown in
Table 5. It can be seen from the quantitative comparison that our algorithm had obvious advantages. From
Table 5, we can see that, in terms of running time, our algorithm was superior to other algorithms by more than 10 times because of the application of superpixels, GPU acceleration, and an efficient similarity calculation strategy. Among the quantitative evaluation indices, GS is an unsupervised image segmentation evaluation index, and ED2 and OCE are supervised image segmentation evaluation indices. A comparison of the GS values for the WTS, MS, MRS, and MHS segmentations showed that the MMHS image segmentation had the lowest average GS (0.3333). This means that the MMHS segments were, on average, most homogeneous internally and most different from their neighbors. The WTS and MS methods had higher wVar values because their segmentation results retained more detailed objects. The MRS segmentation result had the highest MI value indicating that the segmentation was not enough and there were incorrect segmentations. We computed the PSE, NSR, and ED2 by comparing their segmentation results with the ground truth vectors. The PSE of WTS algorithm had a large value (12.380) which implies a significant degree of under-segmentation. The NSR of WTS algorithm also had a larger value (14.833), indicating a dominant one-to-many relationship and a significant degree of oversegmentation. The ED2 values of the WTS algorithm, the MS algorithm, the MRS algorithm, and the MMHS algorithm were 19.321, 3.237, 2.9623 and 2.1024, respectively. The ED2 value of the MMHS algorithm was lower than the ED2 values of the WTS algorithm, the MS algorithm, and the MRS algorithm, showing that the MMHS algorithm was better than the other two algorithms. The OCE value of the MMHS algorithm was the lowest of all the algorithms, showing that the segmentation result produced using the MMHS algorithm was the best among the three algorithms. Therefore, we know that at the object level, the shape, location, size, and existence of our MMHS segment region has the best consistency with the ground reference.
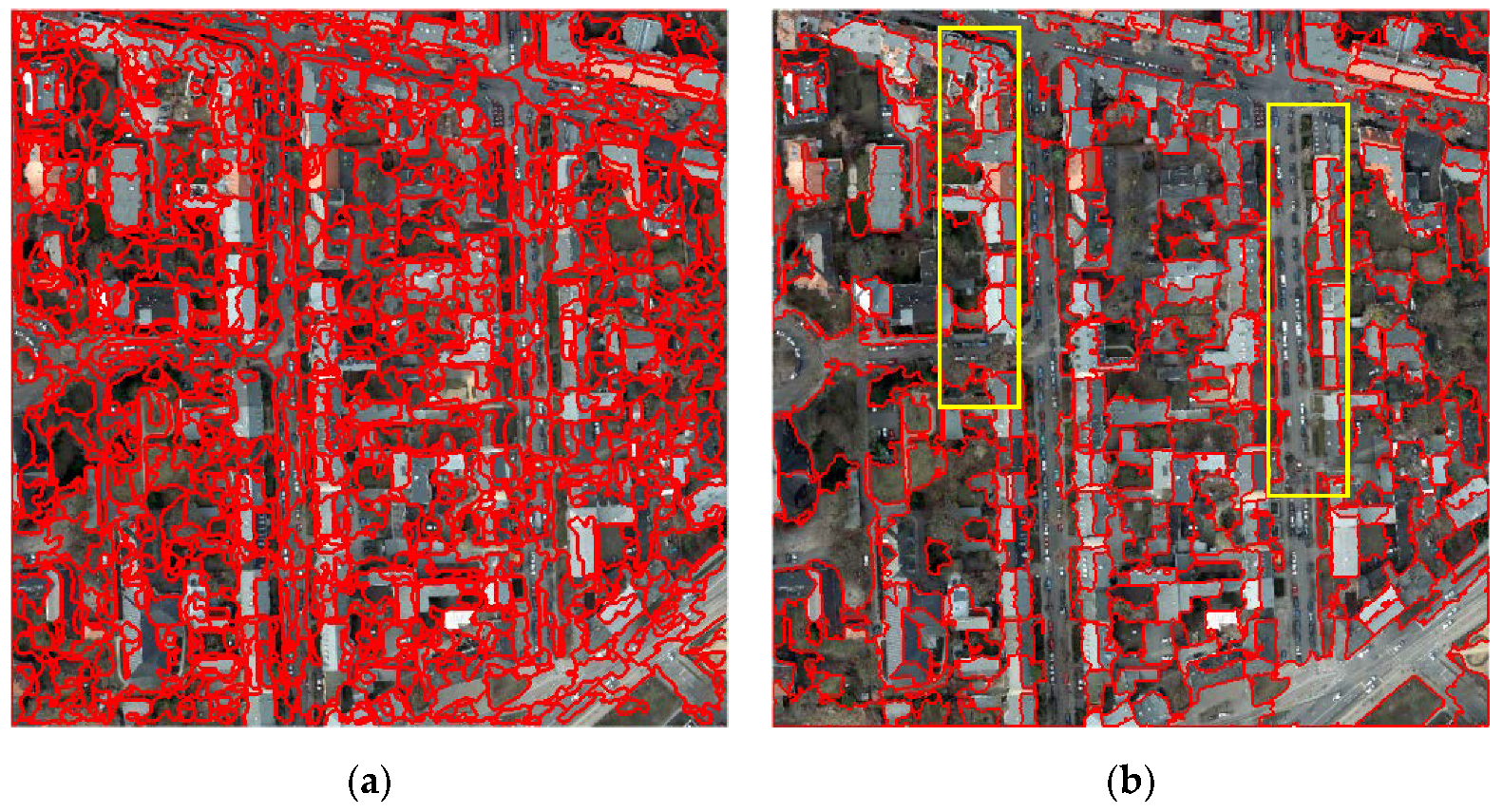
For the T2 image, there were many factories with complex roofs and roads with no obvious boundaries. The segmentation map and the quantitative result of the image T2 are shown in
Figure 10 and
Table 6, respectively. In the first row, the over-segmentation of the WTS algorithm is extremely serious and the MS algorithm also has a lot of over-segmentation in the building roof and lawn areas. On the other hand, the multiresolution segmentation order strategy in the MRS also worked, which achieved better segments. However, it was still not better than MMHS in terms of the boundaries of roofs. As MMHS adopts gSLICr superpixels with good boundary adhesion and the LMM strategy, our method obtained a multiscale performance where both lawn areas with a large scale and building shadow with small scale could be segmented into the same region. For example, a narrow strip of buildings in the lower right corner was segmented out by MMHS, whereas the MRS methods could not distinguish it very well.
From the segmentation assessment in
Table 6, it can be seen that the MMHS segmentation time tended to be basically the same as T1. The four algorithms had larger assessment values of GS, ED2, and OCE than those of T1, indicating that the overall T2 segmentation effect was not as good as T1. Compared with WTS, MS, and MRS, the GS (0.7648), ED2 (5.0657), and OCE (0.9597) of MMHS had obvious advantages which is consistent with our visual assessment.
The segmentation map of image T3 is shown in
Figure 11, and the quantitative results are given in
Table 7. To further evaluate the segmentation efficiency of different methods, unlike T1 and T2, the size of T3 was 6000 × 6000, and T3 had a large uniform texture area and a small scale texture change area. As can be seen from
Figure 11 and
Table 7, apart from WTS, all three methods had good segmentation results and accuracy. Regarding the running time, MMHS achieved a satisfactory 2.2 s, which was far better than the other three methods. For segmentation quantitative indicators, the GS, ED2 and OCE value of the MMHS were the lowest, which means that the segmentation results of the MMHS were obviously better than the other three. From
Figure 11, it can be seen that when compared with MS and MRS, MMHS showed better segmentation performance in the tiny woodland and bare land because the compact superpixel merging provided good boundary adhesion, and it also reduced the impact of noise. The reason for this is that WTS, MS, and MRS are all bottom-up pixel-based methods, of which the merging processes are determined by local homogeneity; therefore, the results are sensitive to details such as color, texture, shape, and noise. Likewise, the scale problem of segmentation is also difficult to solve.
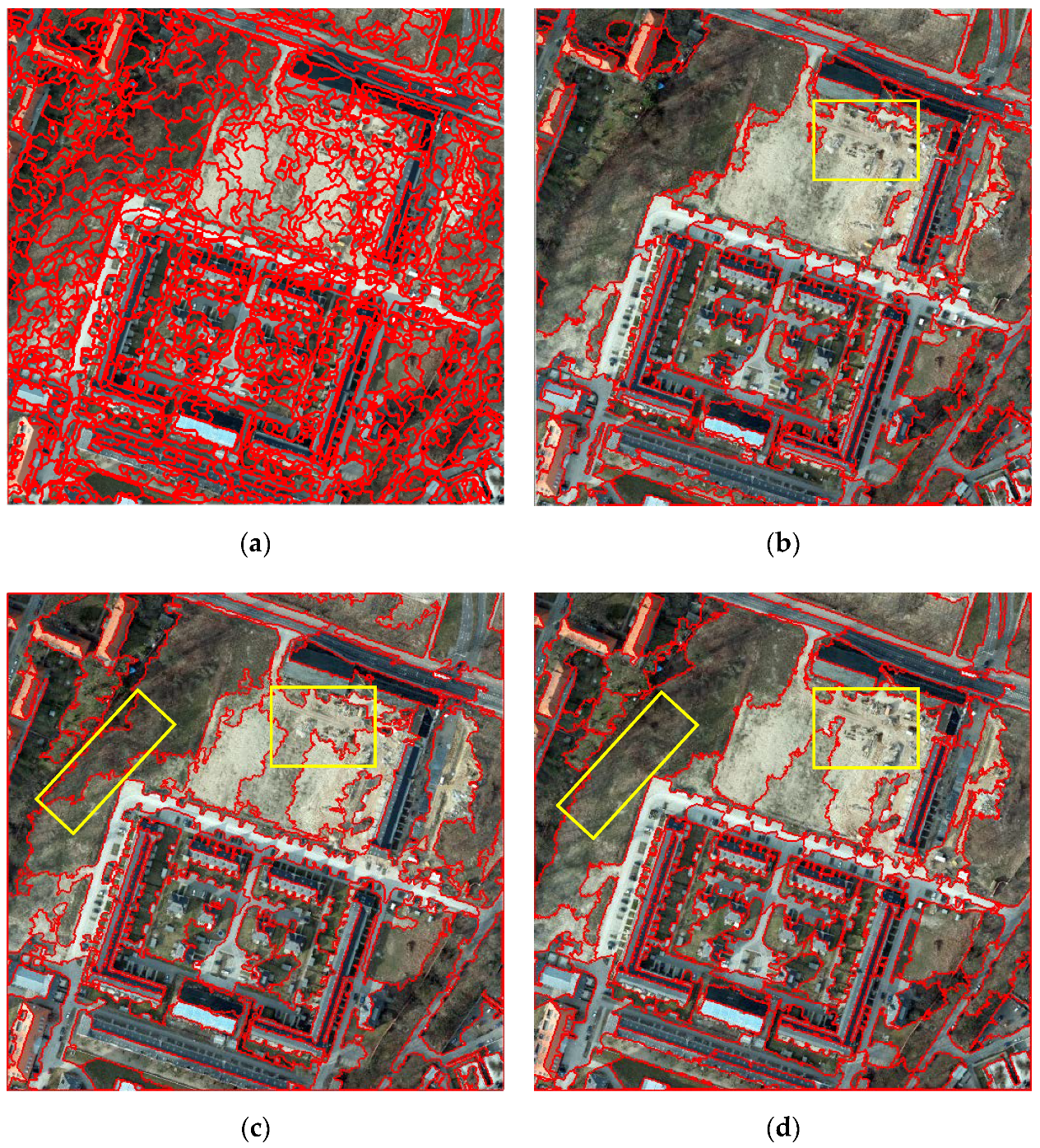
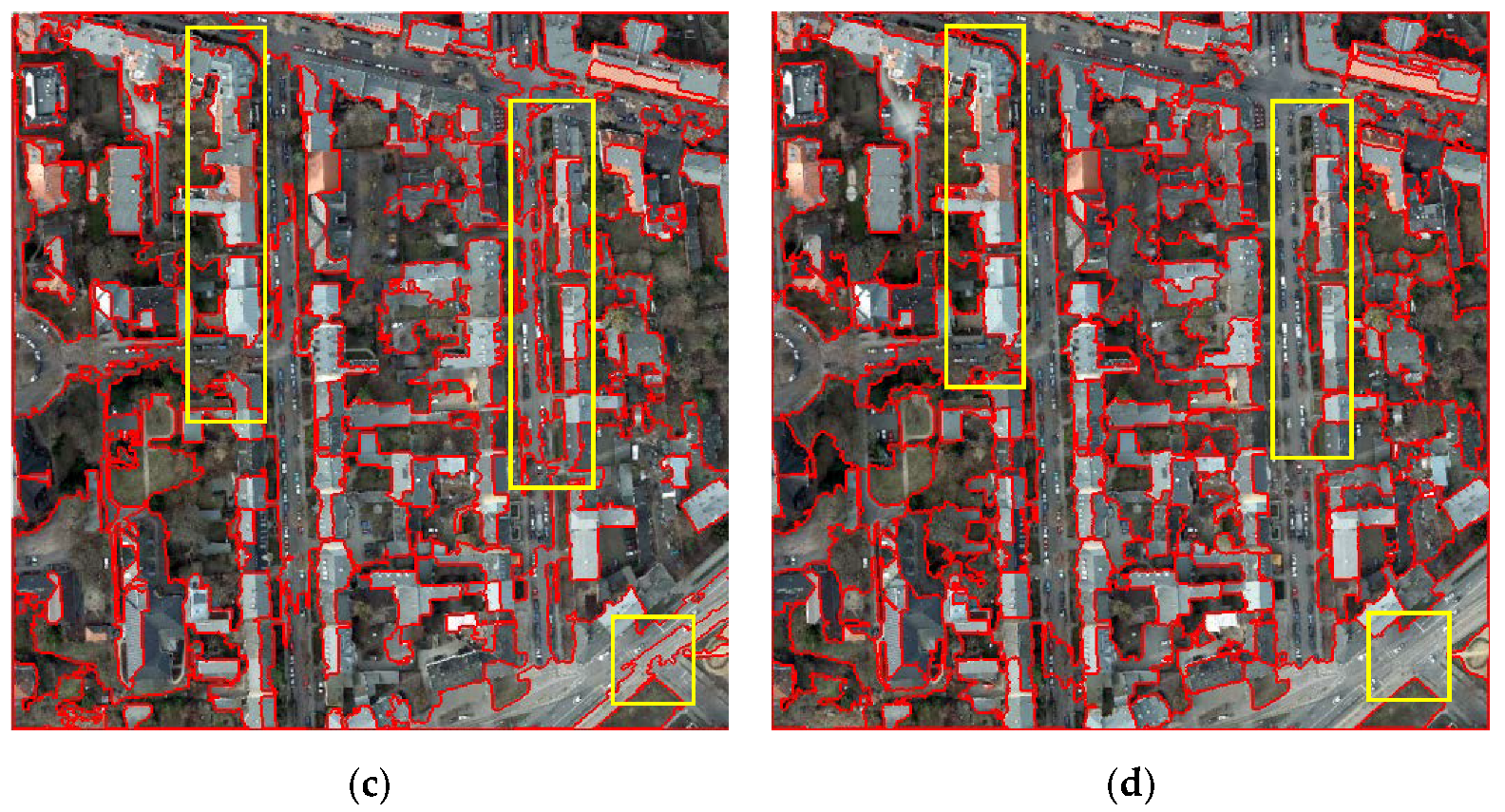
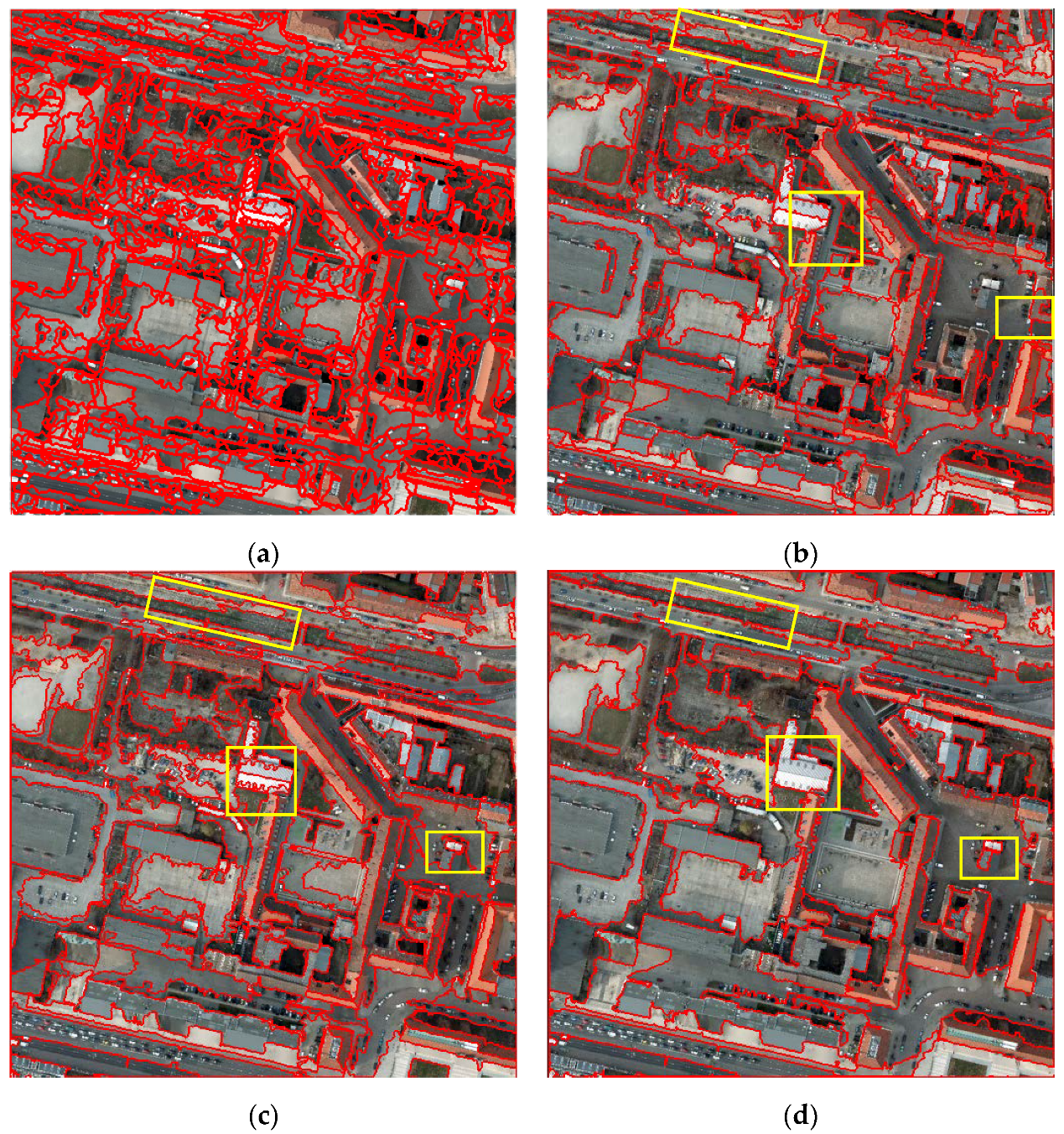
The fourth, fifth, and sixth experimental data were from the urban area of Potsdam, Germany. The segmentation result maps and the quantitative evaluation indicators are shown in
Figure 12,
Figure 13 and
Figure 14, and
Table 8,
Table 9 and
Table 10. Overall, our algorithm still showed better segmentation result than the other three methods in the three large and complex urban image datasets. In terms of segmentation accuracy, the GS, ED2, and OCE values of our MMHS algorithm were the lowest. From the perspectives of
Figure 12,
Figure 13 and
Figure 14, respectively, the WTS algorithm produced severe over-segmentation, and the segmentation quality was the poorest. Both MS and MRS algorithms were able to segment images better, but in complex urban areas, such as the corresponding yellow marked areas (some houses, bare land, roads, etc.), the segmentation effects were greatly affected. Our algorithm showed better segmentation performance in these areas. This is because our algorithm combines details such as color, texture, boundary, and noise in the entire segmentation process. In complex urban areas, any detail information is sufficient to affect the feature representation. In terms of segmentation speed, our algorithm showed great advantages because we used GPU-based superpixels and well-designed similarity computing strategies. For the T4, T5 and T6 datasets, the MS algorithm took the most time, so it could not be tested normally. The WTS took about 500 s, and the MRS took about 200 s. Our algorithm segmentation speed was about 2 s, which is 100 times faster than MRS.
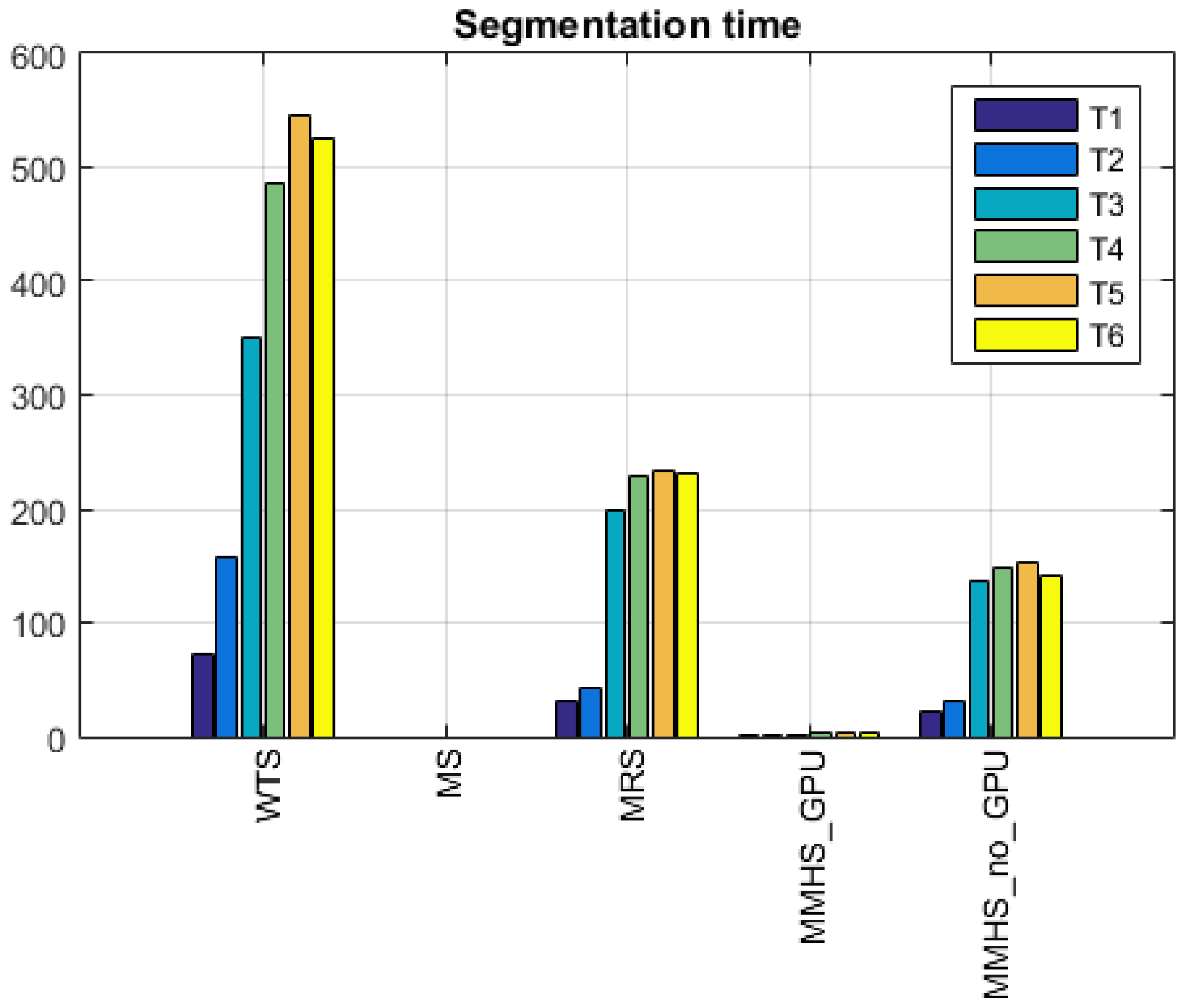
3.3.3. Segmentation Time and Mean Accuracy
The well-recognized segmentation algorithm is the MRS of eCognition. It takes about three minutes to segment a 6000 × 6000 remote sensing image once. To achieve the ideal segmentation result, it is necessary to repeat the segmentation of different scales more than 10 times. Thus, this process is very time consuming. Therefore, our algorithm is expected to greatly improve the segmentation efficiency of remote sensing images. This section presents an overall comparison of the MMHS segmentation time and average segmentation accuracy.
Since our algorithm uses GPU acceleration in the superpixel over-segmentation phase and superpixel feature calculation phase, we analyzed the segmentation time of MMHS without GPU and with GPU. At the same time, based on the above six image segmentation evaluation result, we also analyzed the mean segmentation accuracy of our algorithm. The implemented environments of WTS, MS, MRS and MMHS are introduced in
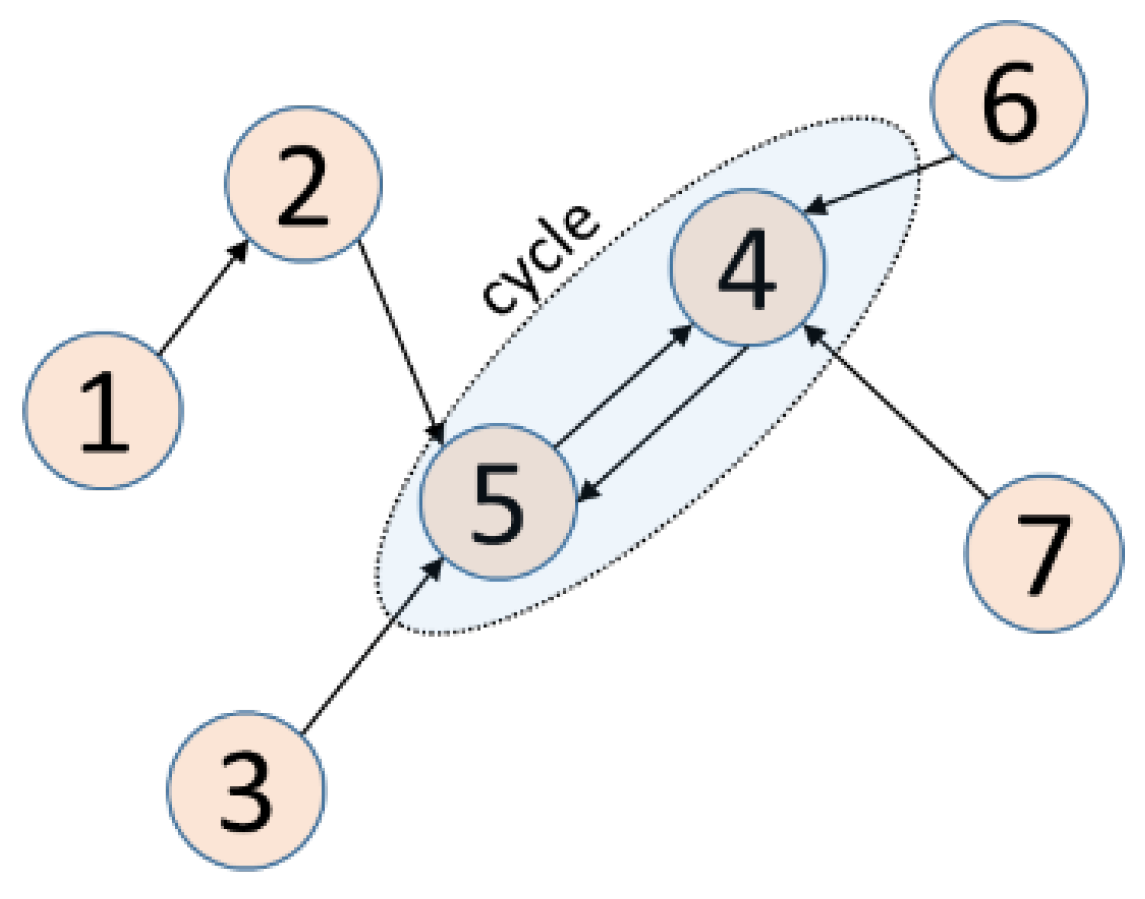
Section 3. Our MMHS does not need to record the cycle arcs in a priority queue, so its computational complexity just depends on the local-oriented update of the graph model. If the number of merging iterations is n, then the complexity of LMM is O(hn), where h represents the complexity of updating the graph model at a merging iteration. As described in
Table 11 and
Figure 15, the segmentation times of MMHS with GPU and MMHS without GPU are both lower than those of others. It can be clearly seen that the MS algorithm is very slow and needs to be improved for HSR remote sensing images. In order to better compare other methods, we did not draw a histogram for MS. The WTS method averaged segmentation time was shown to be more than twice that of MRS. Our MMHS algorithm without GPU acceleration took, on average, 55 s less than MRS, while the GPU-accelerated version of MMHS reached the second level and the speed advantage was very obvious.
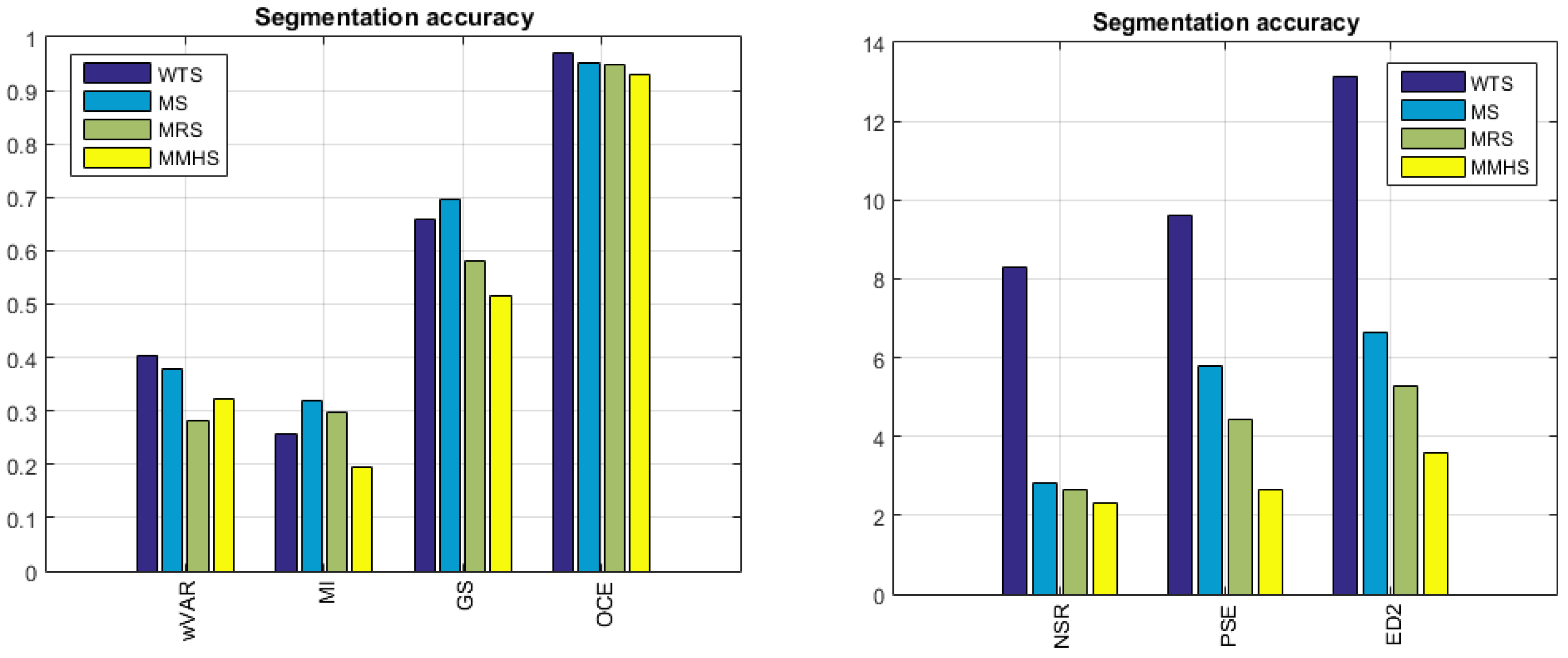
In addition to the advantages of time, our algorithm also showed good segmentation accuracy.
Table 12 and
Figure 16 show the average segmentation accuracy comparison results of the four algorithms. It can be seen that besides the wVAR index, our algorithm obtained the optimal segmentation accuracy. Compared with the wVAR index, our algorithm was lower than MRS, which is different from the local variance calculated by the sliding window in Woodcock and Strahler’s literature [
46,
47]. The wVAR is a global variance. In a further comparison of
Table 2 and
Table 3 the WTS and MS segmentation accuracy shows that if the image is severely over-segmentated, its wVar value will become smaller. Therefore, it is necessary to calculate the GS value combined with MI to further evaluate the segmentation accuracy. Of course, using the idea from the literature presented in reference [
46,
47] to improve the wVar indicator in GS may also be a good solution.
3.4. Sensitivity Analysis
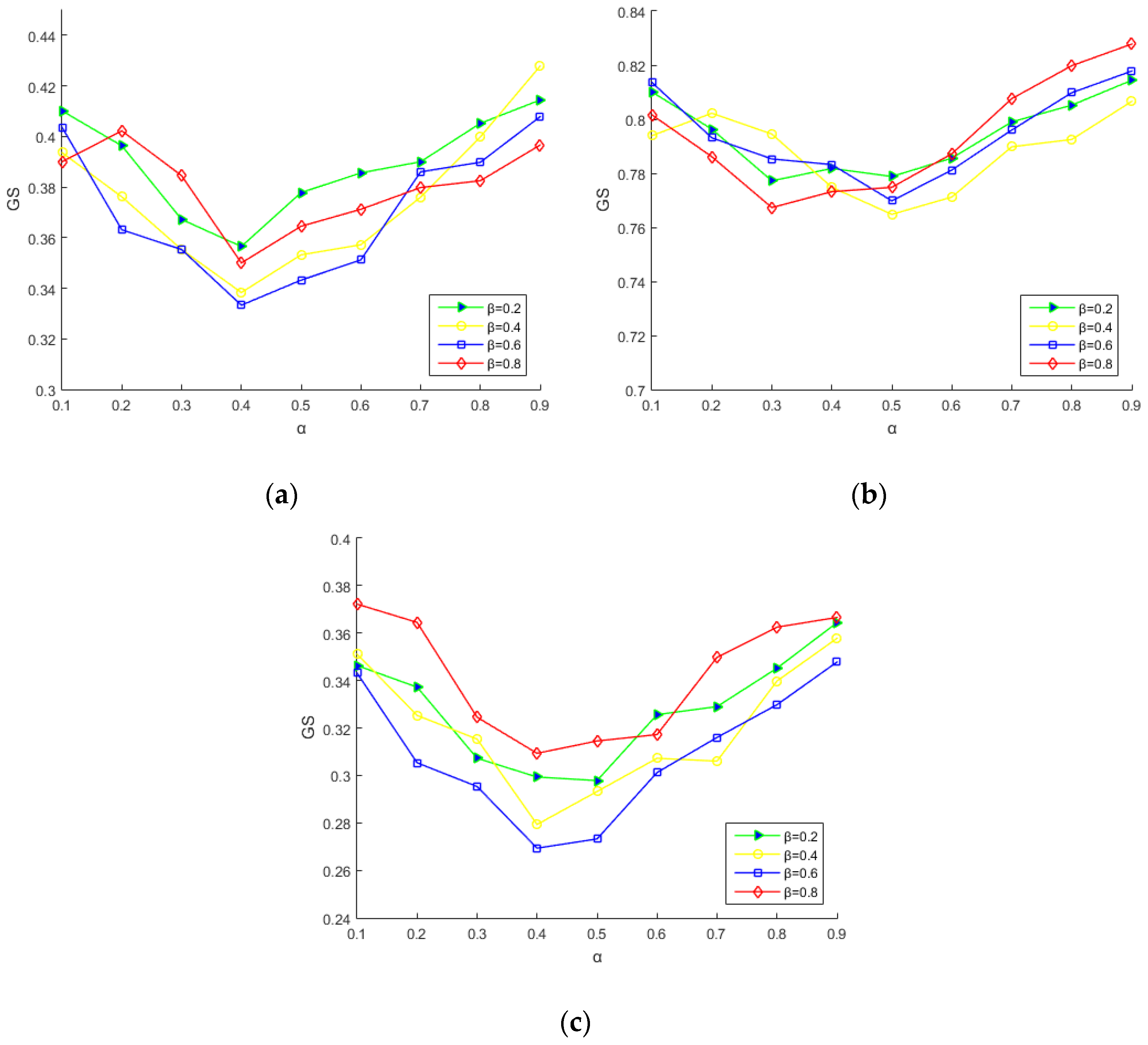
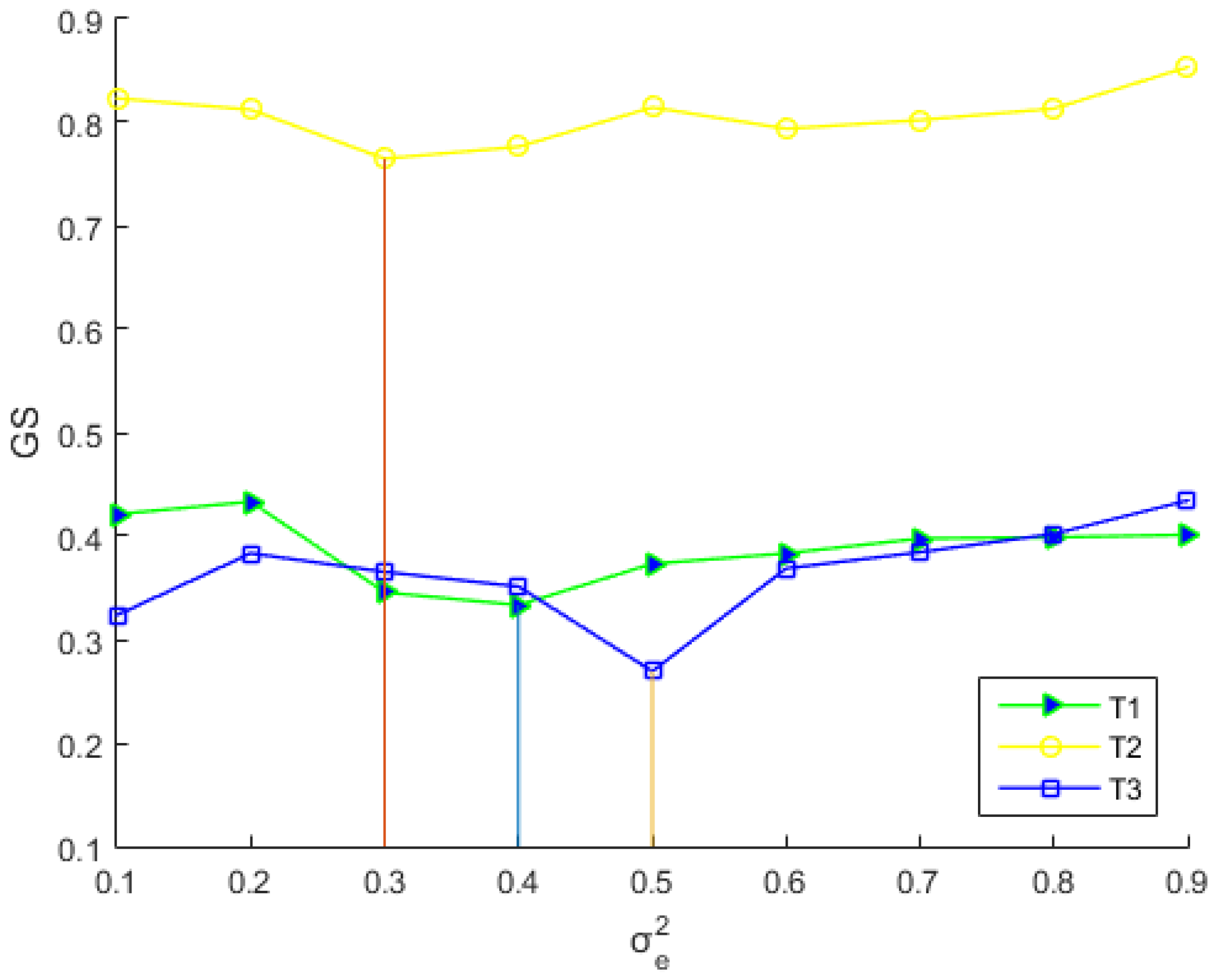
In this section, we present the analysis of the sensitivity of the weight parameters—color , texture , boundary constraint parameters —of our MMHS algorithm on the segmentation result accuracy. In essence, this is a process of selecting the texture, spectral, and boundary features in a balanced manner when facing different ground objects. We chose T1, T2, and T3, which represent three typical images of towns, cities and forests. The number of segments was set as 74, 105, and 109 for T1, T2, and T3, respectively. By adjusting α and β, the variation of the segmentation accuracy GS was calculated, and the corresponding graph was plotted.
As shown in
Figure 17, the different curves in the three experimental graphs represent the changes in the non-supervised segmentation accuracy GS. The experiment texture weight parameters β were 0.2, 0.4, 0.6, and 0.8, respectively, when the color weight parameter α changed from 0 to 0.9, and the boundary constraint parameters
were 0.4, 0.3, and
for the T1, T2, and T3 images, respectively. Compared with the distribution of the curves in
Figure 17a–c, they had similar trends. When the value of β was constant, the change of the GS value became smaller with the increase of α and then became larger. This shows that the segmentation accuracy of the algorithm is affected by the distribution of spectral and texture weights. For HSR images, the spectral information plays the most important role in most cases. At the initial stage, the HSR image is over-segmented, the range of each superpixel is small, and the spectral features are more stable and accurate than the texture features. So, for the influence of segmentation accuracy, the effects of the spectral features are more obvious. As the spectral feature weights increase, the segmentation accuracy gradually increases, and when the texture and spectral weights are optimally balanced, the segmentation accuracy GS reaches an optimal value. After that, when the spectral feature weights continue to increase, the influence of texture features begins to increase, and the weights of the texture and the spectrum become unbalanced. As a result, the segmentation accuracy gradually decreases. The optimal GS values of the three datasets for MMHS were 0.3333, 0.7648 and 0.2693, respectively. From
Figure 17a,c, the T1 and T3 segmentation accuracies were best at α = 0.4 and β = 0.6.
Figure 17b shows that when α = 0.5 and β = 0.4, the segmentation accuracy of T2 was optimal. In general, the variation range of the segmentation accuracy GS was about 0.15, which indicates that although the selection of feature weights affects the segmentation accuracy, the segmentation accuracy can still maintain good stability.
In order to analyze the impact of parameter
on the segmentation result accuracy, the parameter color
and texture
were set as 0.4/0.5/0.4 and 0.6/0.4/0.6, and
was chosen from the region of {0.1, 0.2, …, 0.9} for the T1, T2, and T3 datasets, respectively. It can be observed from
Figure 18 that the GS values of the three images firstly decreased and then increased. This demonstrates that the segmentation accuracy deteriorates when the boundary constraint
value is too small or too large. When the boundary constraint is too small, even if the shared boundary is short, as long as the colors or textures of the two adjacent superpixels are sufficiently similar, they will be directly merged into a sub-region. Thus, it is easy to cause a jagged boundary phenomenon. On the other hand, if the boundary constraint is too large, it will prevent the merging of the ideal grouping area, resulting in over-segmentation. So, as can be seen, the boundary constraint
can obviously improve the segmentation quality on these test areas. This is because, under equal conditions, merging priority is given to the couple of regions that share the longest boundary. For the T1, T2, and T3 test images, the optimal segmentation accuracies were obtained when the
was set to 0.4, 0.3, and
, respectively.
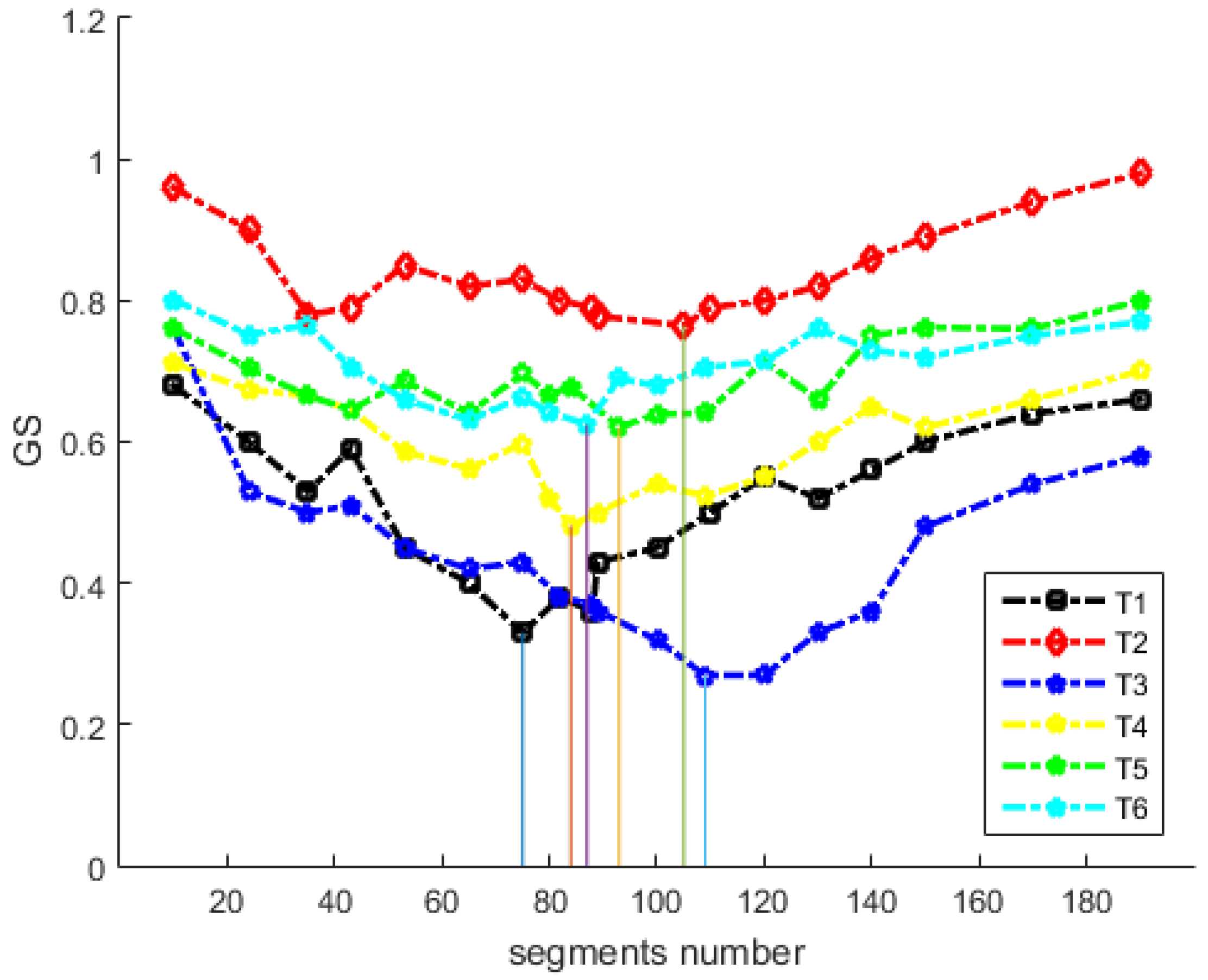
3.5. Effect of Superpixel Scale Selection
In this section, we present the analysis of the effect of segmentation scale selection and determined for the optimal number of segments. Woodcock and Strahler [
47] proposed measuring the relationship of landscape features in different spatial resolutions using a
n ×
n moving window. In this method, the mean value of the standard deviation (SD) of the spectral attributes within the window is calculated, which is the LV. Finally, the LV curve is formed to obtain the best image resolution [
47]. The authors explain the mechanism as follows: if the spatial resolution is considerably finer than the objects in the scene, most of the measurements in the image will be highly correlated with their neighbor cells, and then, the likelihood of neighbors being similar decreases and the LV rises. Since reference [
46] introduced these theories into digital images, the semivariogram method has been widely applied to scale modeling of remote sensing images [
48]. The semivariogram can represent how a variable’s variance changes with different sampling intervals on one image, which can represent the degree or scale of spatial variability. Lucian et al. [
49] improved the LV method to propose the estimation of scale parameter (ESP) tool. The solution consists of inspecting the indicator diagram of the local variance (LV) and the rate of change in LV (ROC-LV) produced using the ESP tool. It is a scale parameter estimation plug-in developed for eCognition software that calculates the local variance of homogeneous image objects using different scale parameters.
Different from the local variance used by ESP, our work attempted to use the global score (GS) which is calculated by adding the normalized weighted variance (wVar) and the normalized global Moran index (MI). The variance of the segmented region can reflect the relative degree of homogeneity of the region and is often chosen as the intra-segment goodness measure. wVar is a global calculation based on the area of the segmented region, which makes large segments have more impact on global homogeneity. Global Moran’s I is a spatial autocorrelation measure that can characterize the degree of similarity between an area and its neighbors and can be used as a good indicator of segmentation quality. Brian Johnson [
38] chose it as the inter-segment global goodness measure in the calculation of the global score (GS). Low Moran’s I values indicate high inter-segment heterogeneity, which is desirable for image segmentation. So, in theory, a good segmentation result should have a low global score. The global score (GS) can reflect the intra- and inter-segment heterogeneity information to evaluate the optimal scale selection. At the same time, we selected the same datasets for this analysis. As illustrated in
Figure 19, with an increase in the segmentation number, the resulting GS values firstly retain a downtrend, while when the value of GS reaches the lowest peak, it tends to increase for each dataset. This means that as the number of segments is too small or too large, segments tended to have much higher variance and became more similar to neighboring segments. The optimal segmentation number is the point at which this GS value reaches the lowest value and segments are, on average, most homogeneous internally and most different from their neighbors. Therefore, the optimal numbers of segmentation for the six datasets were 74, 105, 109, 84, 93, and 87, respectively. In further analyses, T1, T2, T3, T4, T5, and T6 represented three different regions of town, city and forest, respectively and the average GS value of the three was also very different. For urban area T2, the mean GS was the highest and T3 was the lowest. This may have been because study area T3 was a more homogeneous forest scene, in which the spectral values for the different types of land cover were quite similar. Image T2 was a more heterogeneous urban area, where different types of land cover have very different spectral characteristics. Therefore, in these more heterogeneous environments, variance and Moran’s I will likely continue to be at a high level, and we also combined the judgment of visual effects to determine the optimal value of the segmentation number.
4. Discussion
The novelty of this study is that we used gSLICr superpixels to decompose the complexity of HSR remote sensing data into perceptually meaningful uniform blocks, efficient multifeature similarity calculations, and multiscale LMM merger strategies. First, the MMHS method was shown to achieve near real-time efficiency. It has the potential to be a framework for real-time HSR remote sensing processing. Secondly, we fused diverse features in an effective manner which is an adjustable multifeature integration strategy to handle complex situations of HSR images. Thirdly, in MMHS, we were able to obtain multiscale hierarchical segmentation results. Our work attempted to use the intra- and inter-segment heterogeneity information to address the optimal scale problem.
Obviously, our method makes full use of spectral, texture, scale, local, global information, and these parameters can be adjusted for various objects. A comparison of pixel-based and superpixel-based segmentation revealed the fact that better segmentation accuracy can be achieved using superpixels instead of pixels. In terms of segmentation time, our algorithm was dozens of times faster than the traditional method. It showed significant advantages over the traditional algorithm and avoided the disadvantages of these methods. The segmentation result was described both in vector and raster format and established a better foundation for higher level image processing, such as pattern recognition and image classification. Our method can also be applied to other similar remote sensing applications. At the same time, it could be further improved, for example, it could integrate more features, including the size of superpixels and more simple and effective features. Overall, based on our design philosophy, this method can further improve his segmentation efficiency and accuracy.
Superpixels originate from computer vision applications. In remote sensing, superpixels greatly improve the processing efficiency of large-scale HSR remote sensing images. For example, GPU-based superpixel processing technology has great application prospects for real-time video processing applications of drones and commercial video satellites [
50]. This is also the focus of our future research.
Of course, this paper found some problems in the evaluation of segmentation accuracy. There are many methods for image segmentation evaluation. However, the applicability and accuracy of these methods is another issue worth studying. Firstly, in order to be more objective, the segmentation methods should distinguish the calculation principles of the evaluation methods. Secondly, was found in our experiment that when the OCE is used to evaluate the segmentation result, even if the segmentation effect is good, the OCE value is still too large, which indicates that the sensitivity of OCE method in segmentation quality is not enough. Third, the optimal unsupervised GS quantitative evaluation value is obtained by normalizing the multiple segmentation results of each algorithm. The calculation of MI in the GS indicator is complicated, and it is necessary to deal with negative numbers. We believe that the above problems can be further improved so that the evaluation of remote sensing image segmentation is more fast, simple and effective. The calculation of ED2 is a good example. It uses the AssesSeg tool, a command line tool to quantify image segmentation quality [
51], which allows easy and fast segmentation evaluation.
The optimal segmentation result of our algorithm in this paper was obtained by calculating the GS evaluation index and visually judging the segmentation results on different scales. The scale problem of HSR remote sensing image segmentation is an unavoidable one, so the disadvantage of our method is the determination of superpixel size and the optimal merging indexes. HSR image features are complex, and there are many changes in texture, spectrum, shape, and scale. The features in the superpixel area will be unified, and the small -cale boundary information will be discarded. The size of the superpixel determines the boundary accuracy in the subsequent segmentation. According to different objects features, the corresponding superpixel size for initial over-segmentation is selected. Although the NNG and LMM strategies guarantee efficient local optimization, the essence of the optimal combination index is the ideal value of the local and global optimal in the segmentation process. The question of how to obtain the best combination index in the segmentation results obtained in this paper will also be the focus of future research.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}