Underground Object Classification for Urban Roads Using Instantaneous Phase Analysis of Ground-Penetrating Radar (GPR) Data




Abstract
:
1. Introduction
2. Underground Object Classification Using GPR Data
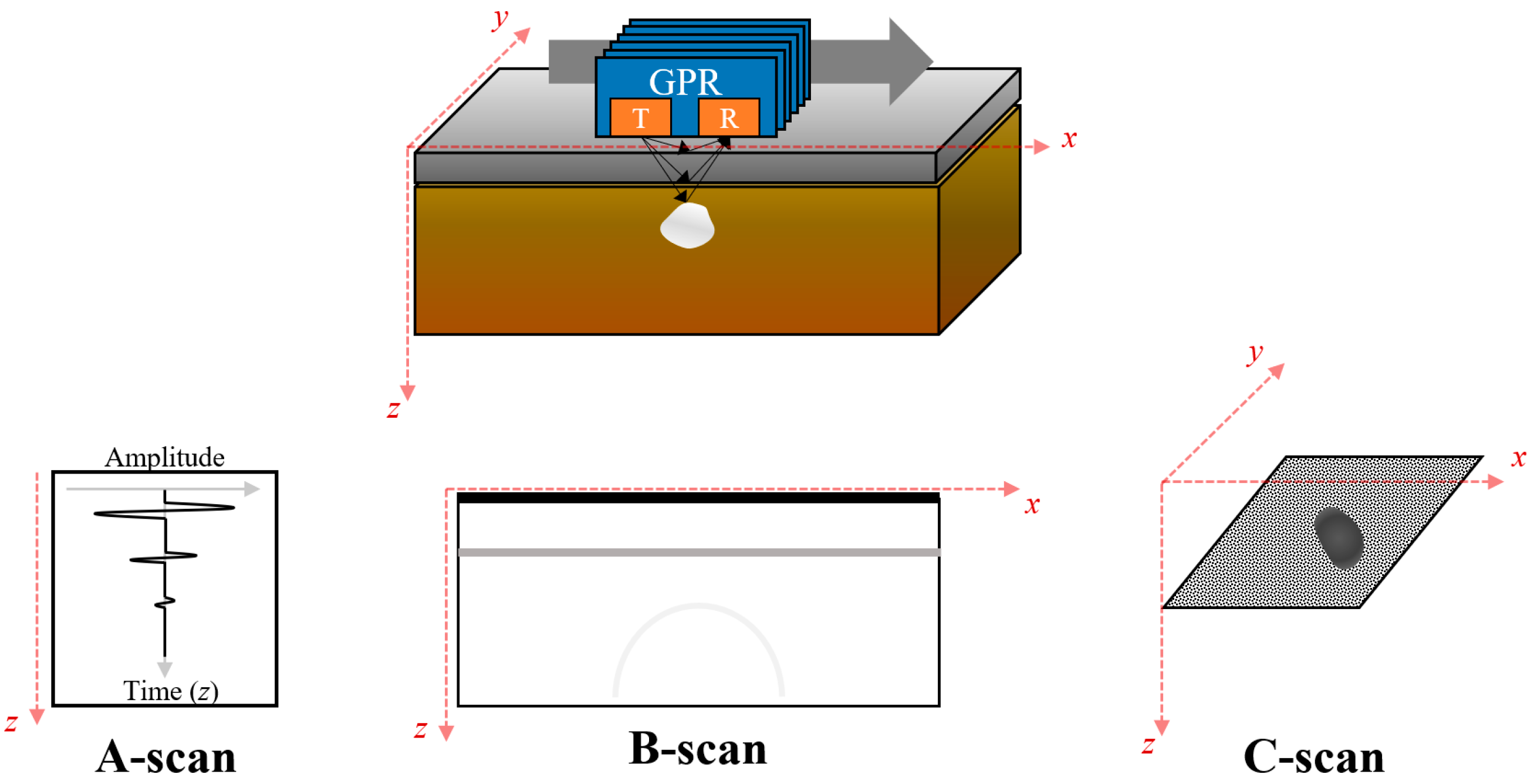
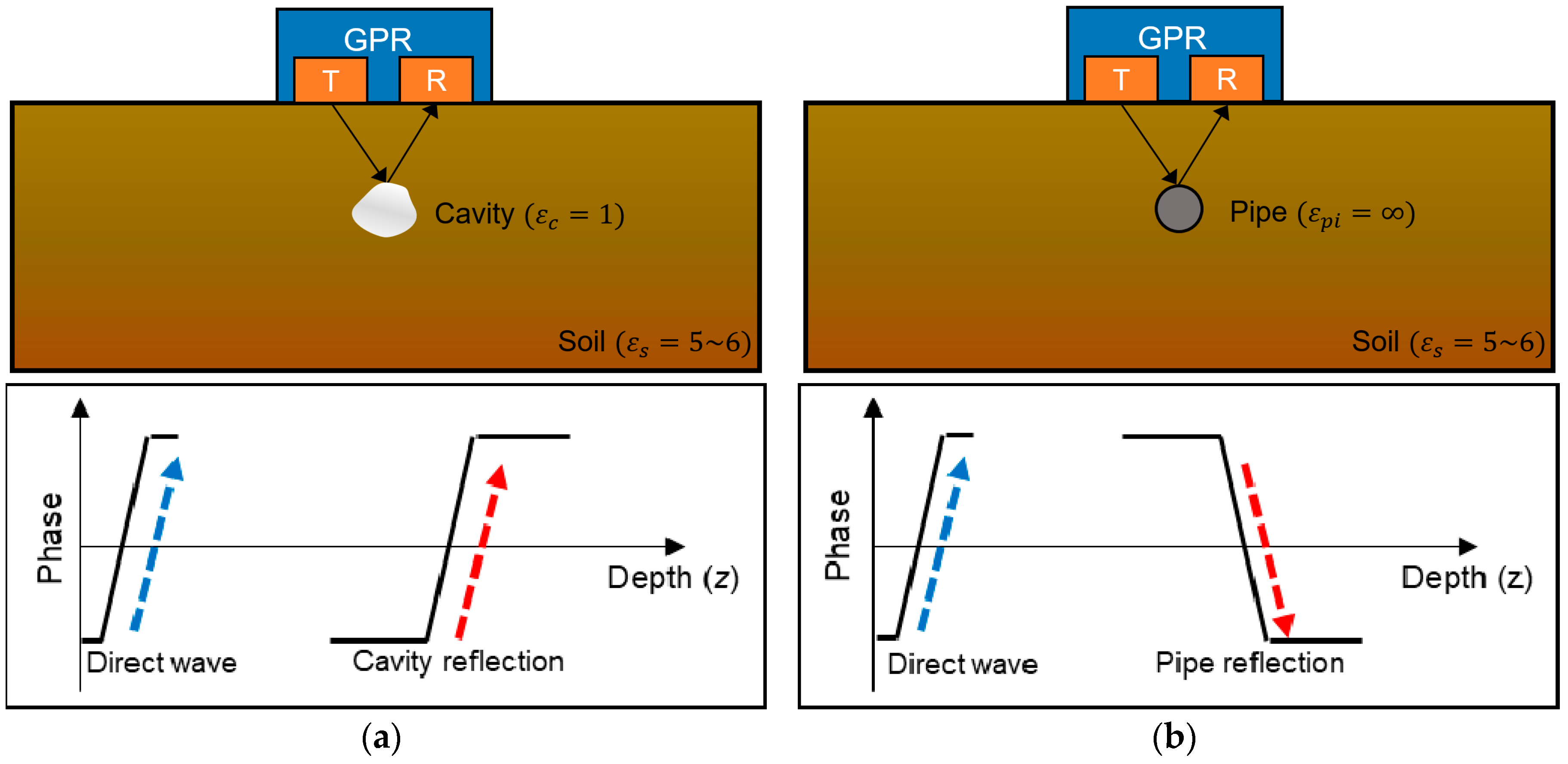
2.1. Working Principles of GPR
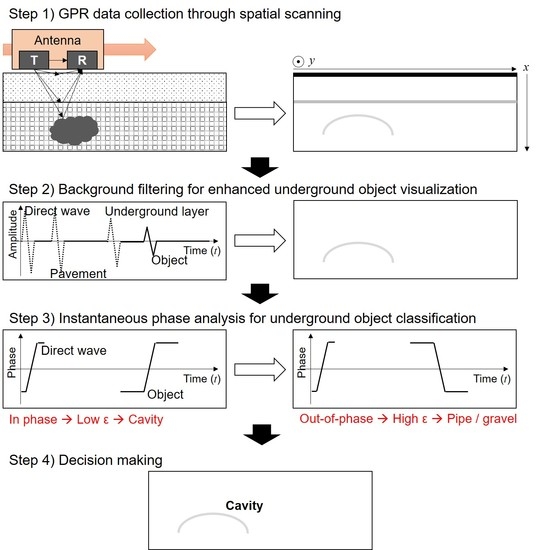
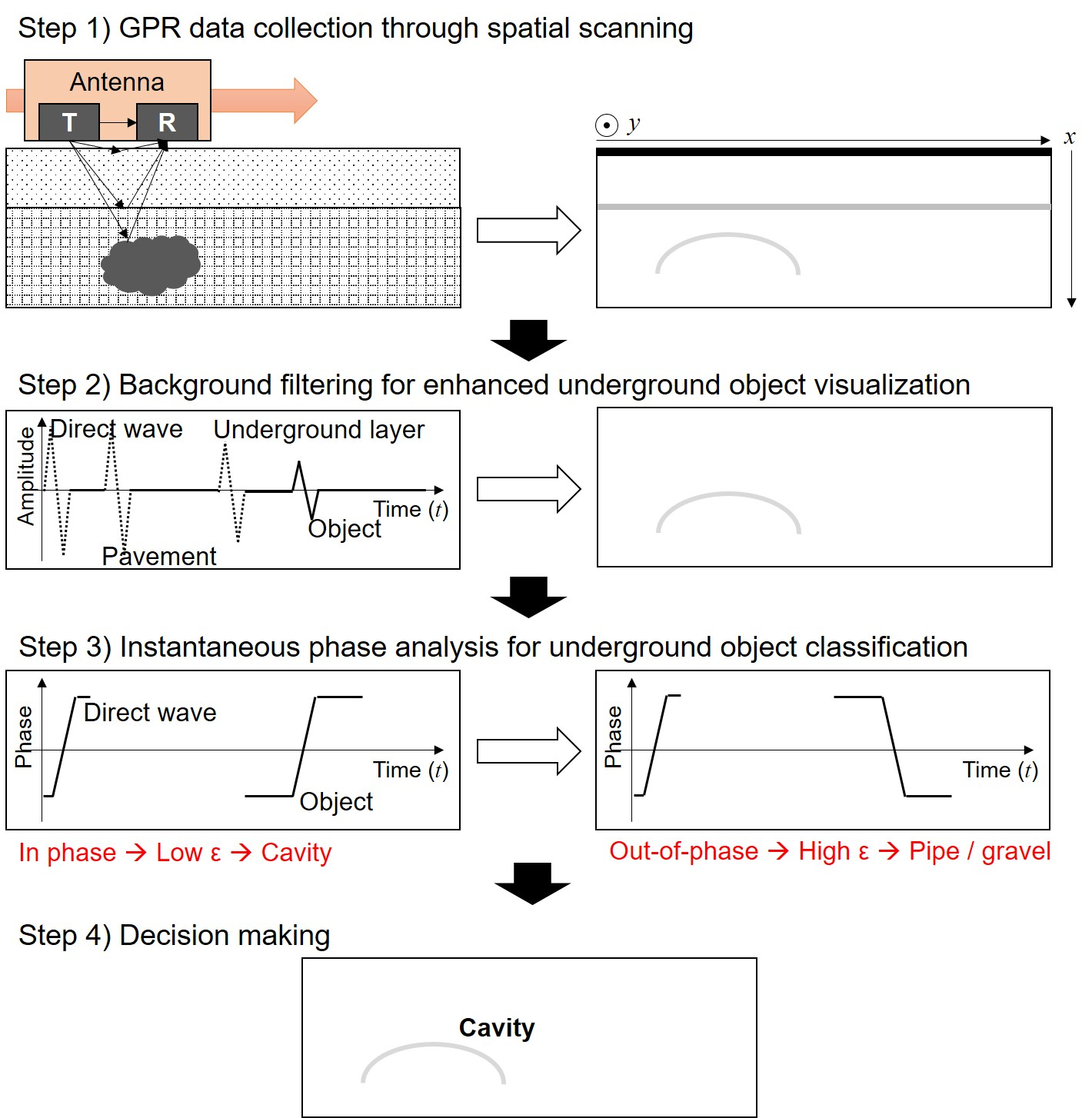
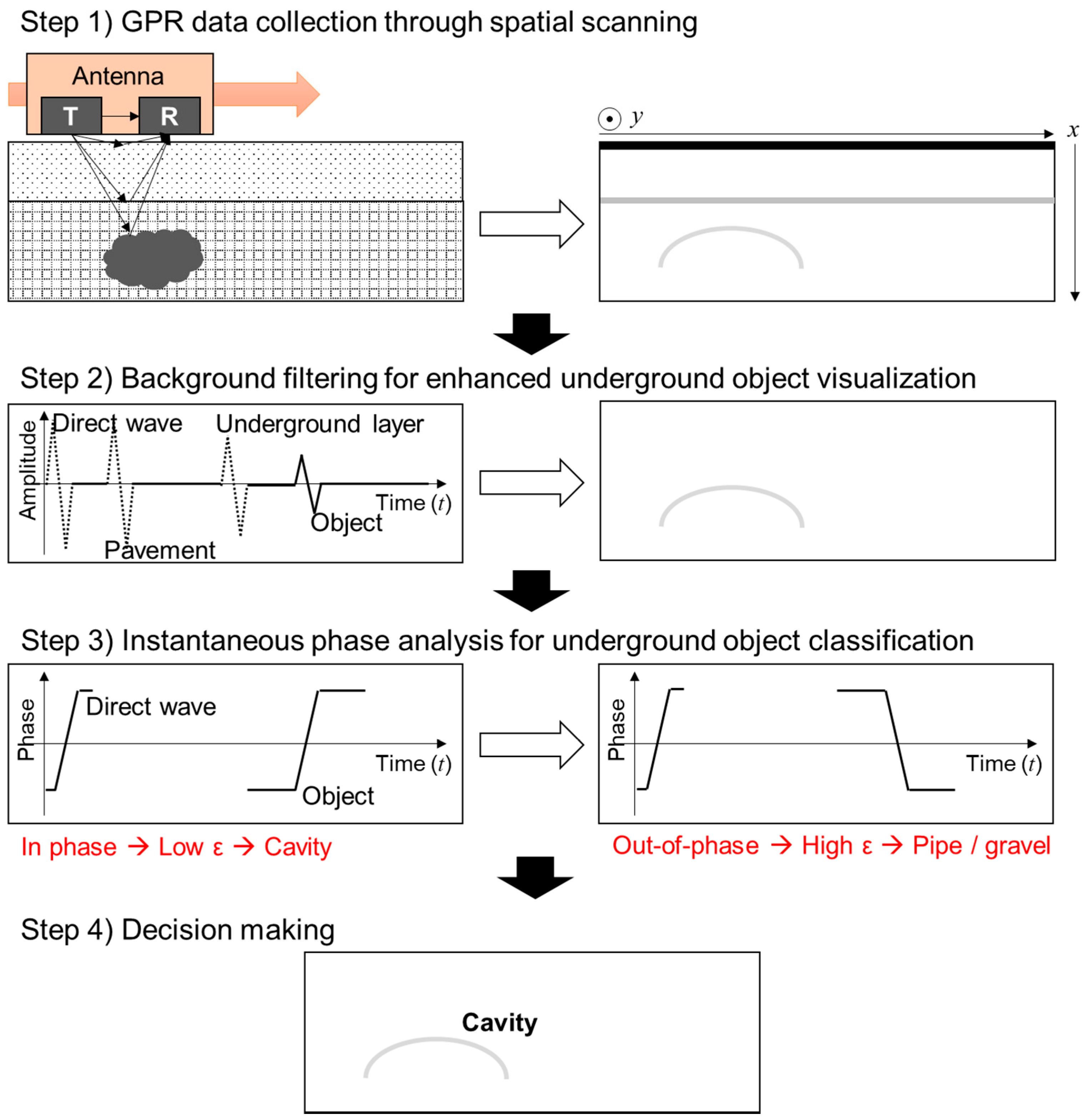
2.2. GPR Signal Analysis for Underground Object Classification
2.2.1. GPR Data Collection
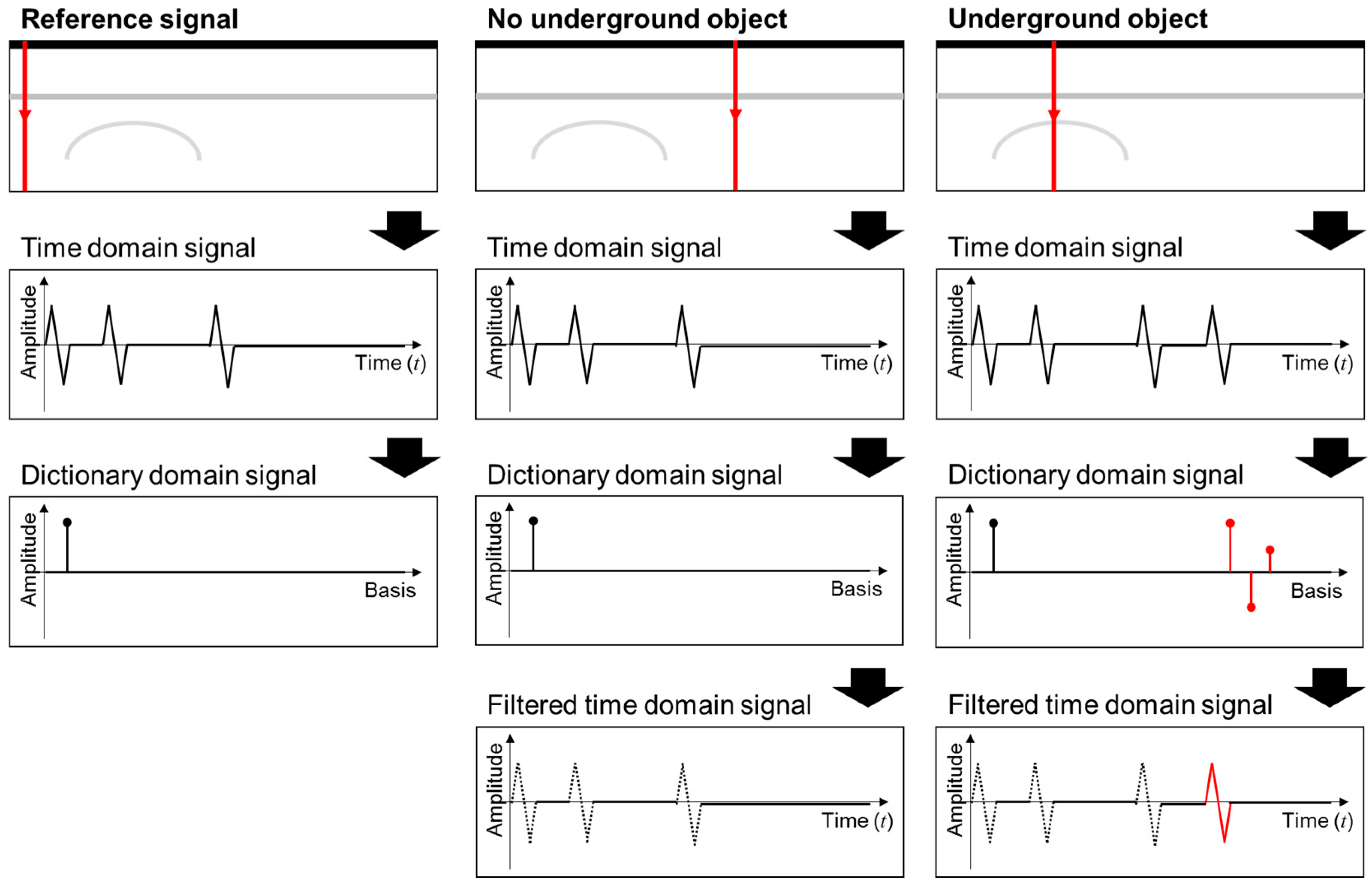
2.2.2. Background Filtering to Enhance Underground Object Visualization
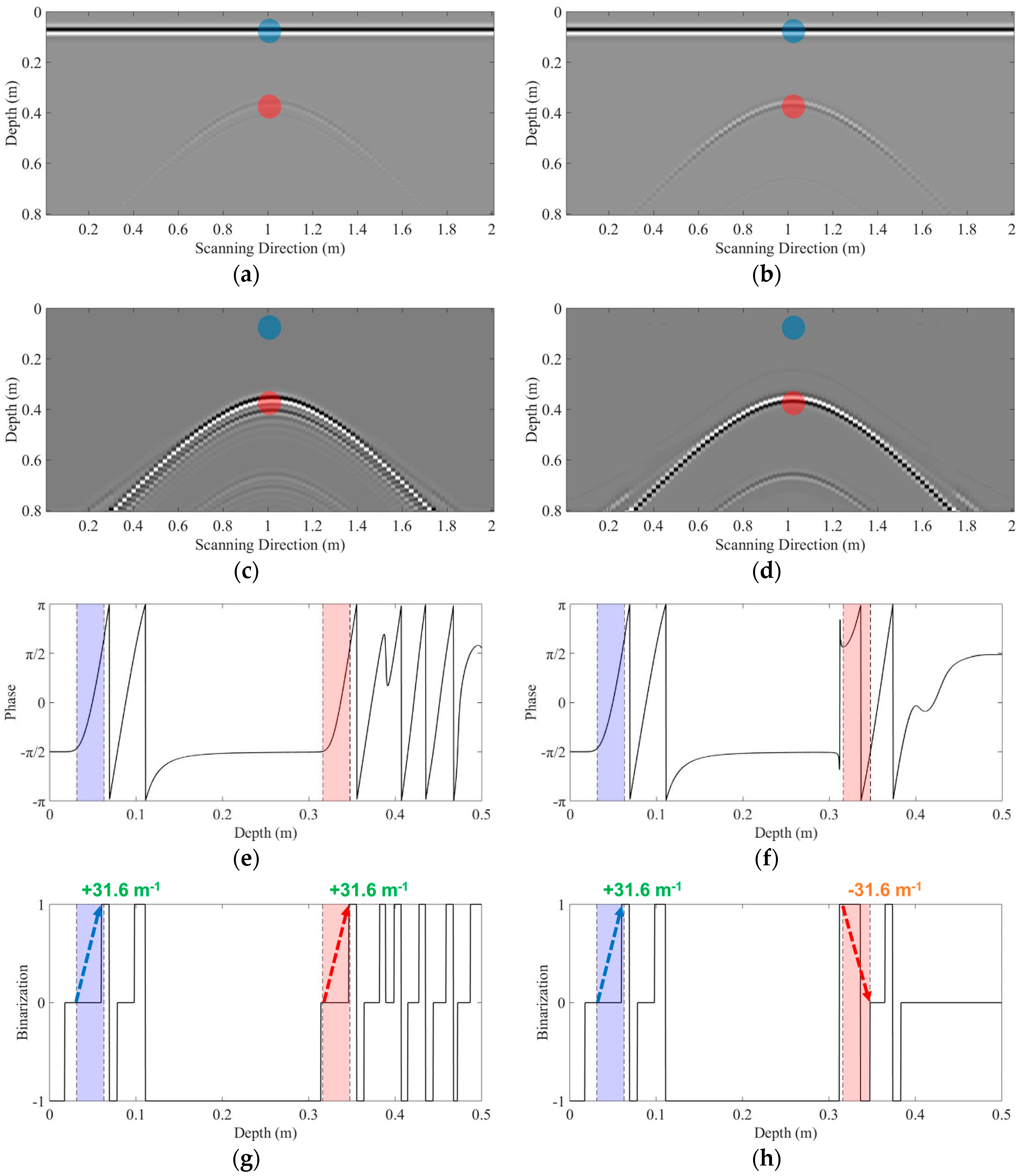
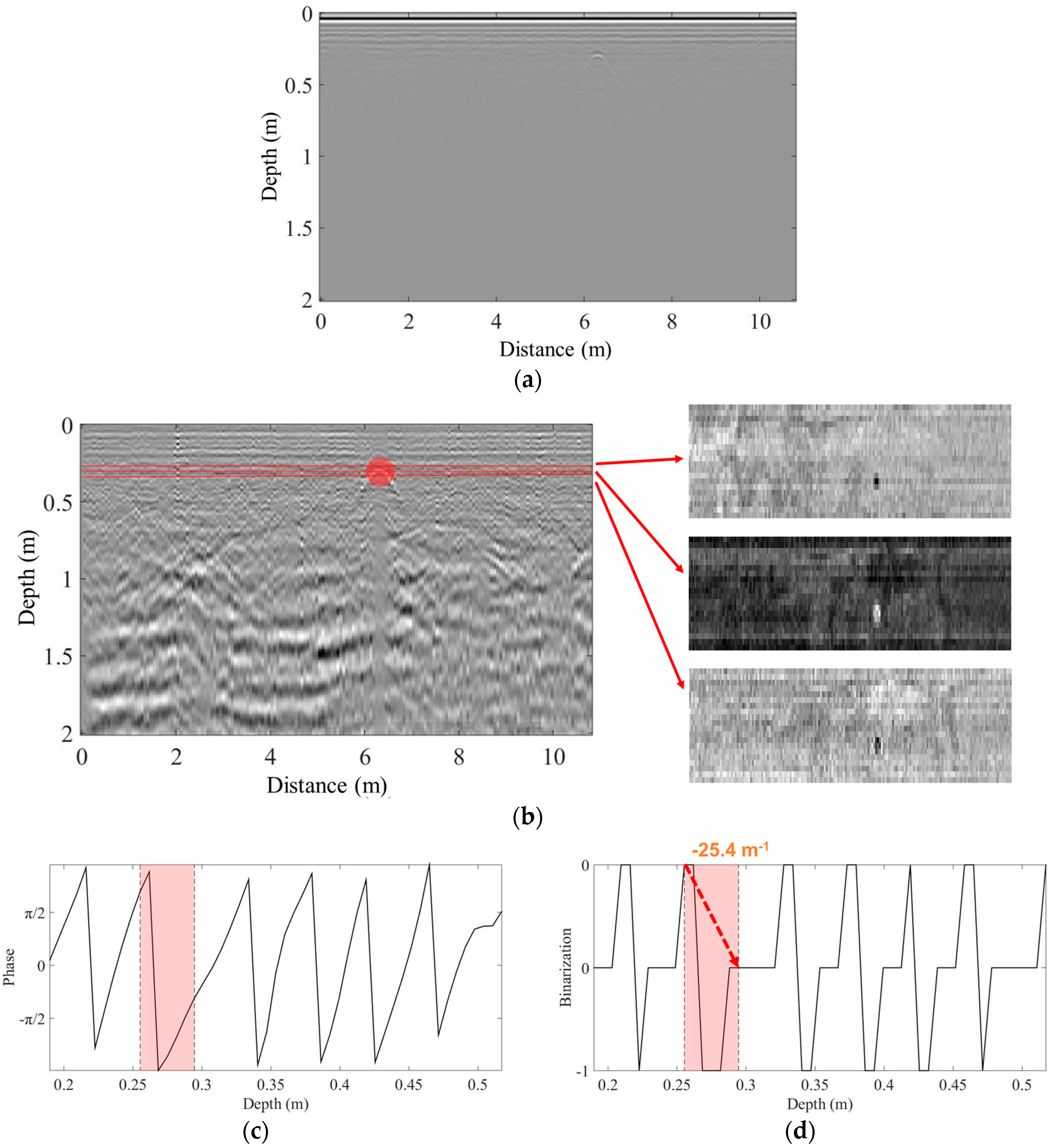
2.2.3. Instantaneous Phase Analysis for Underground Object Classification
2.2.4. Decision Making
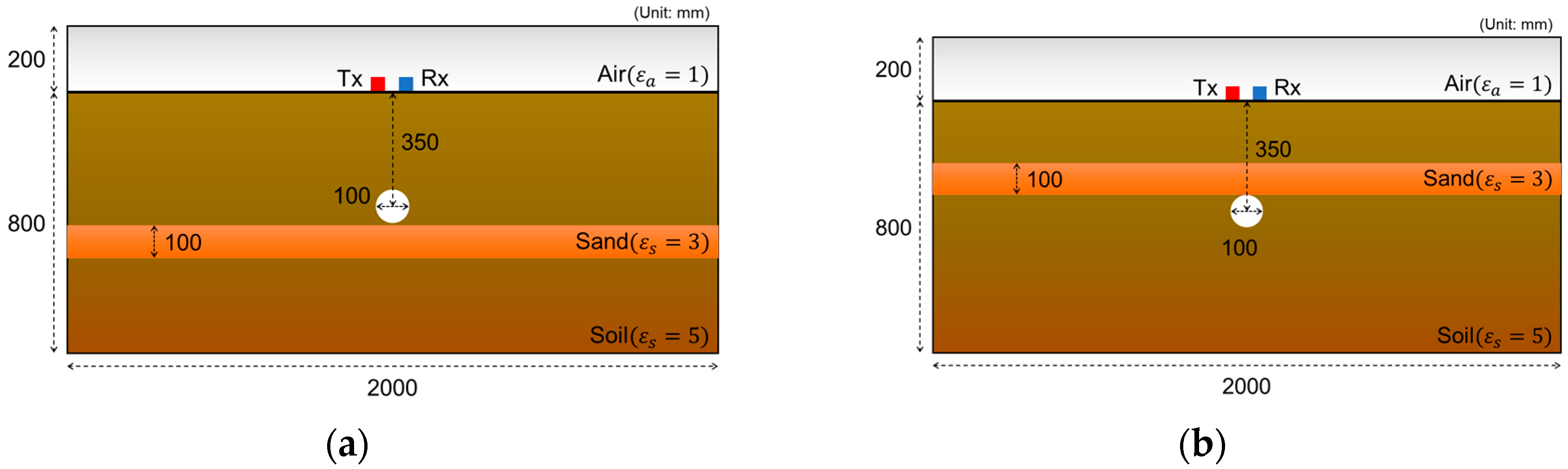
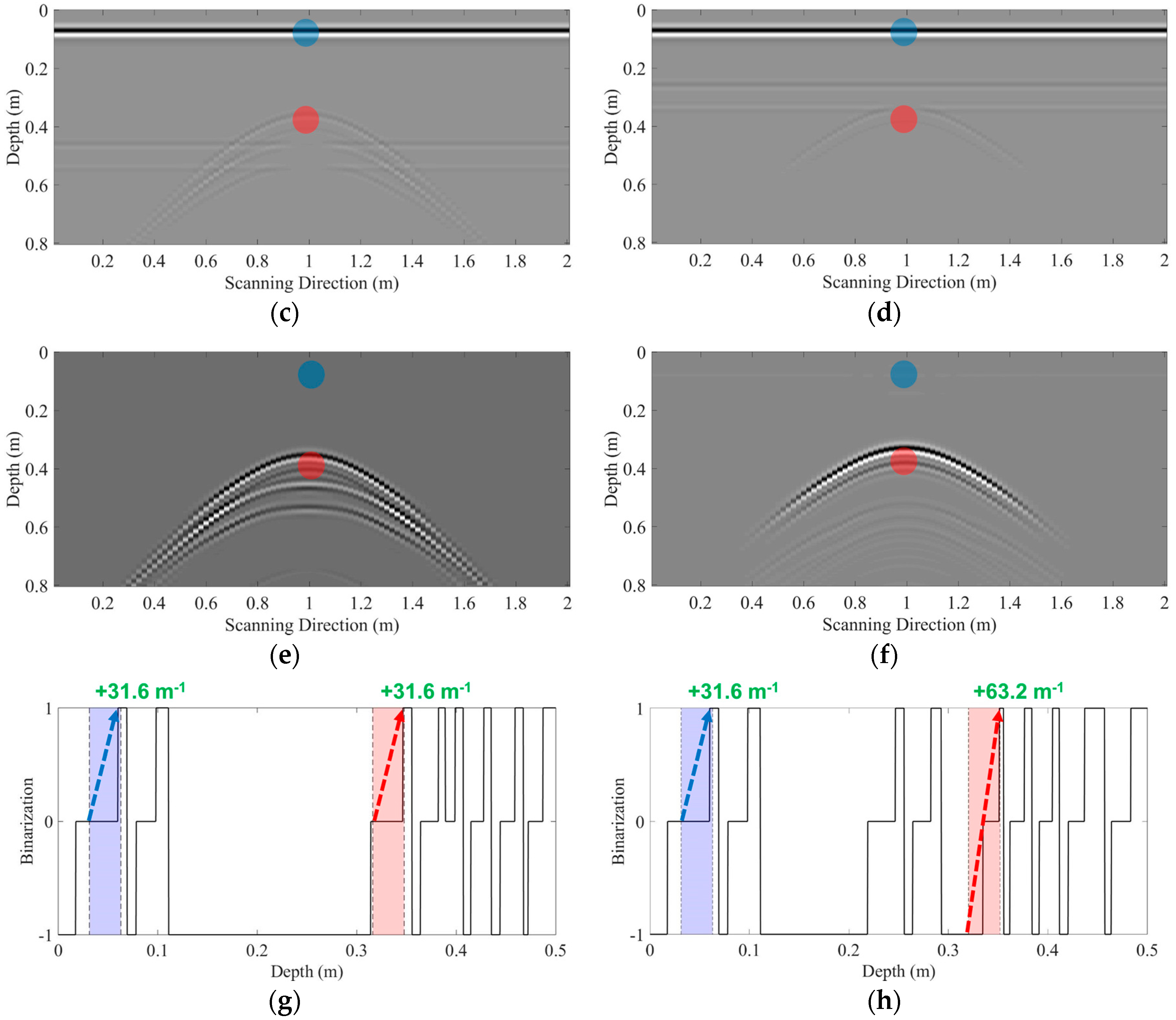
3. Simulation Result: Numerical Validation Using GPR Simulation Data
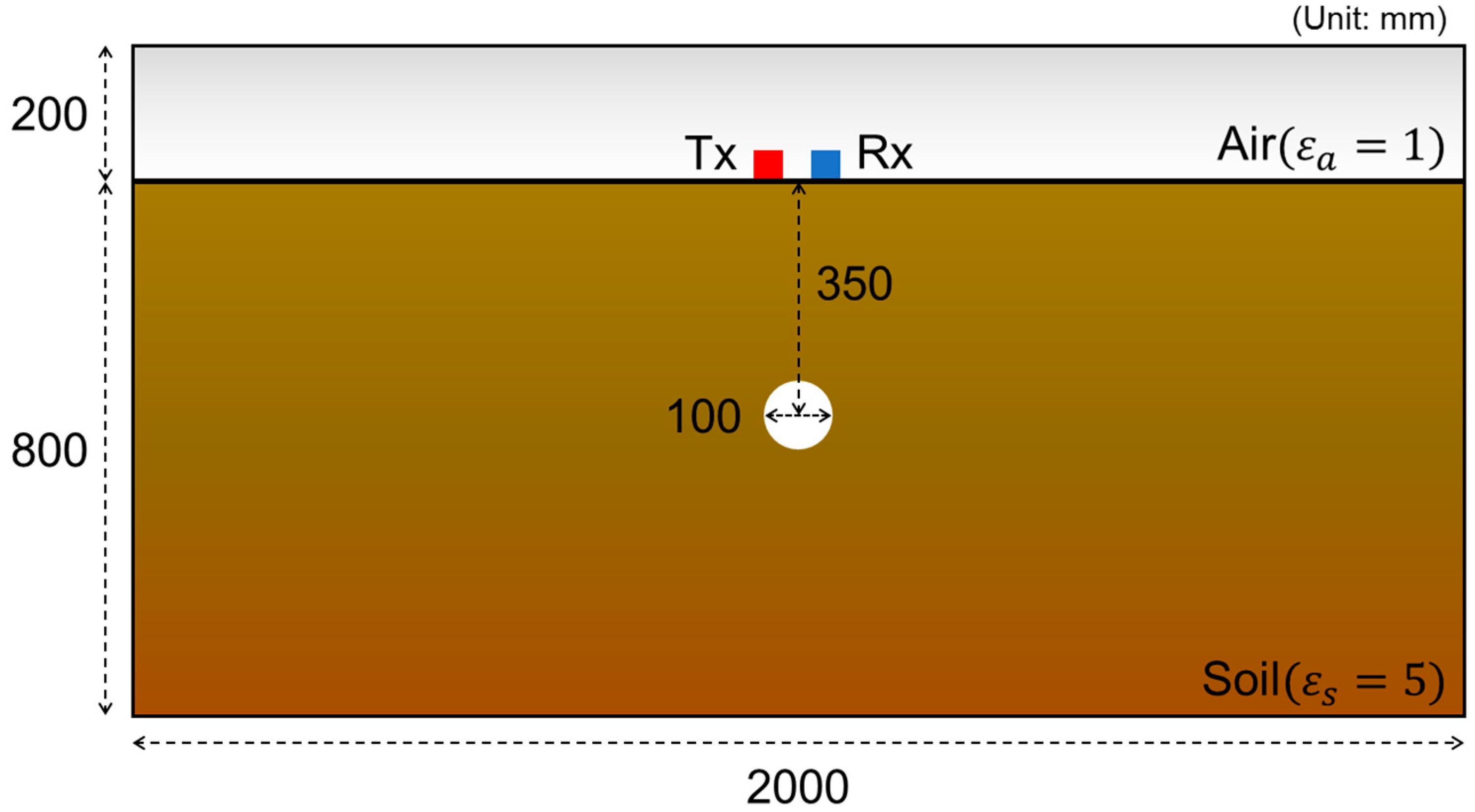
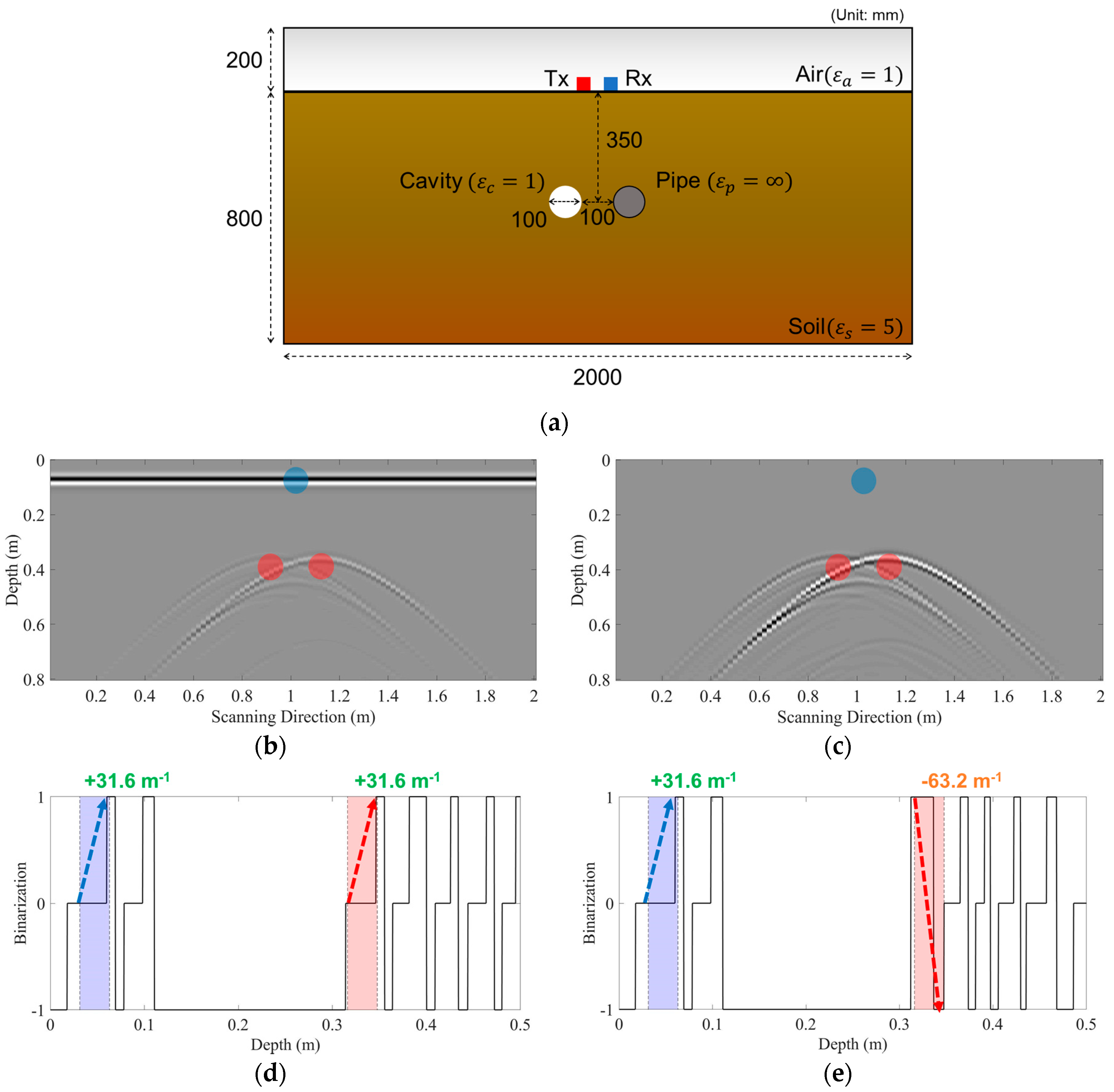
3.1. Simulation Setup
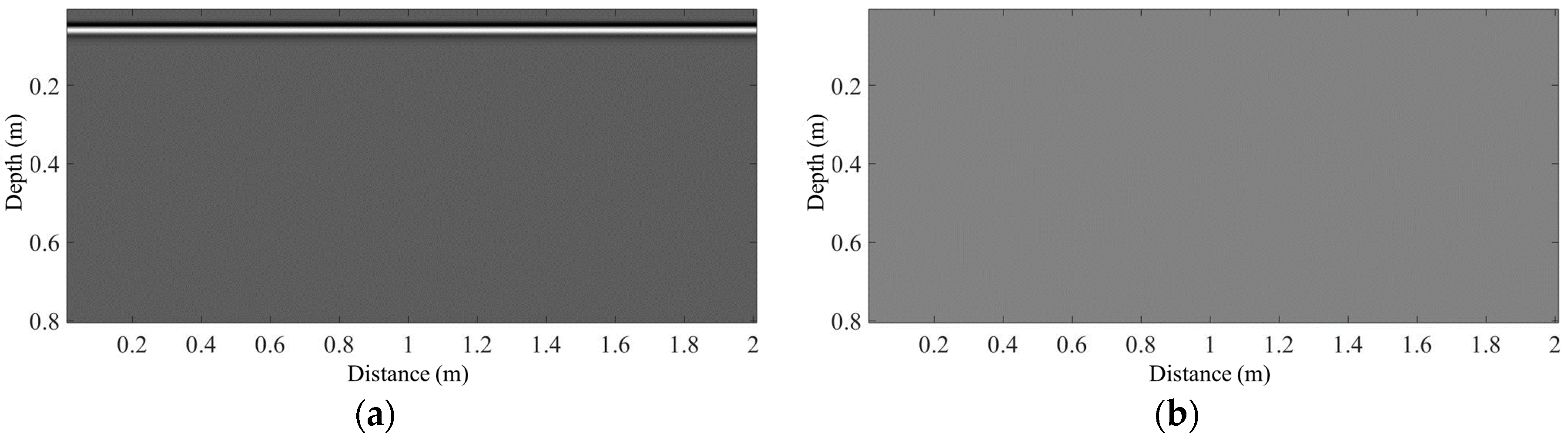
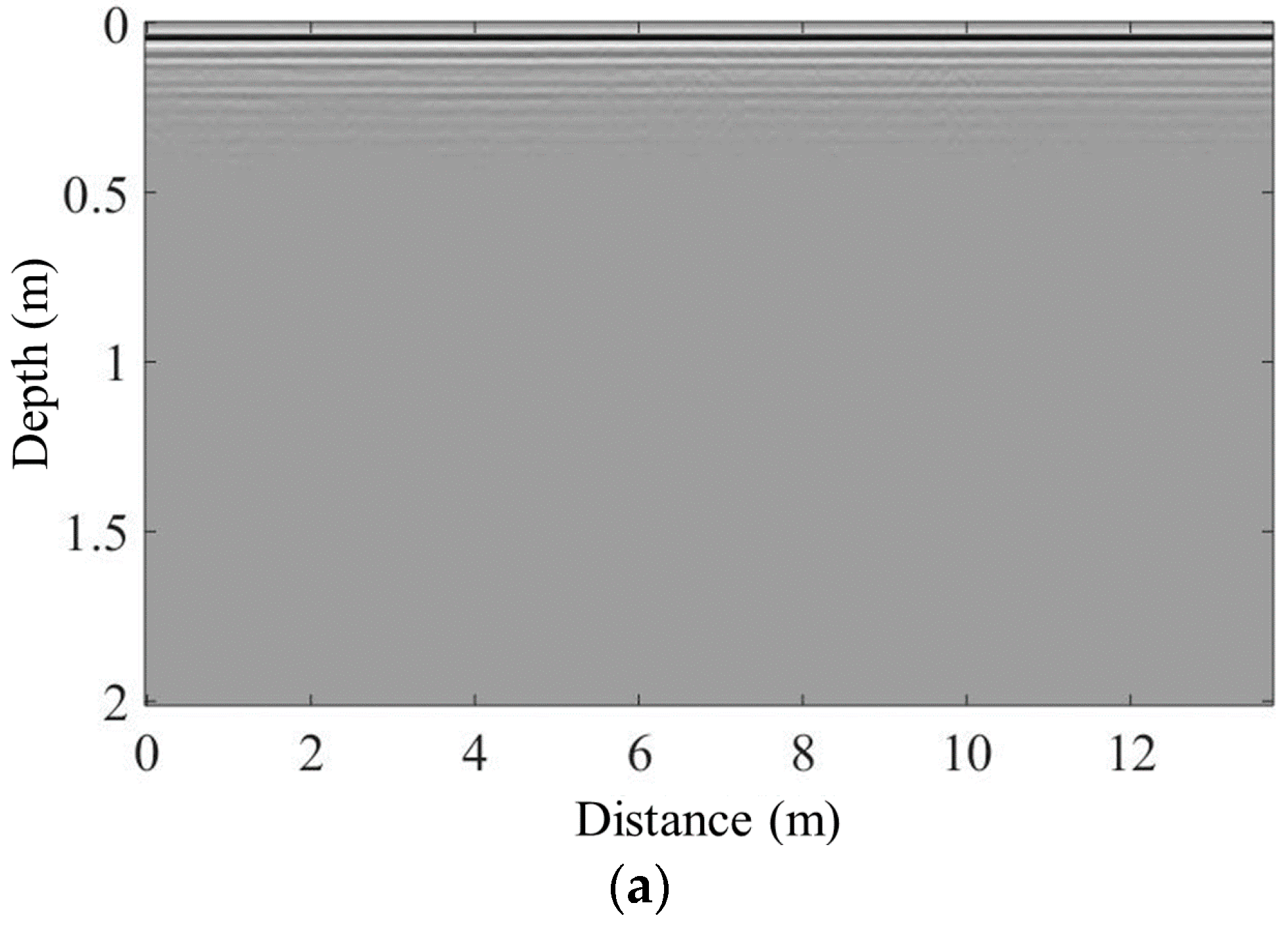
3.2. Classification Results for the Pristine Model
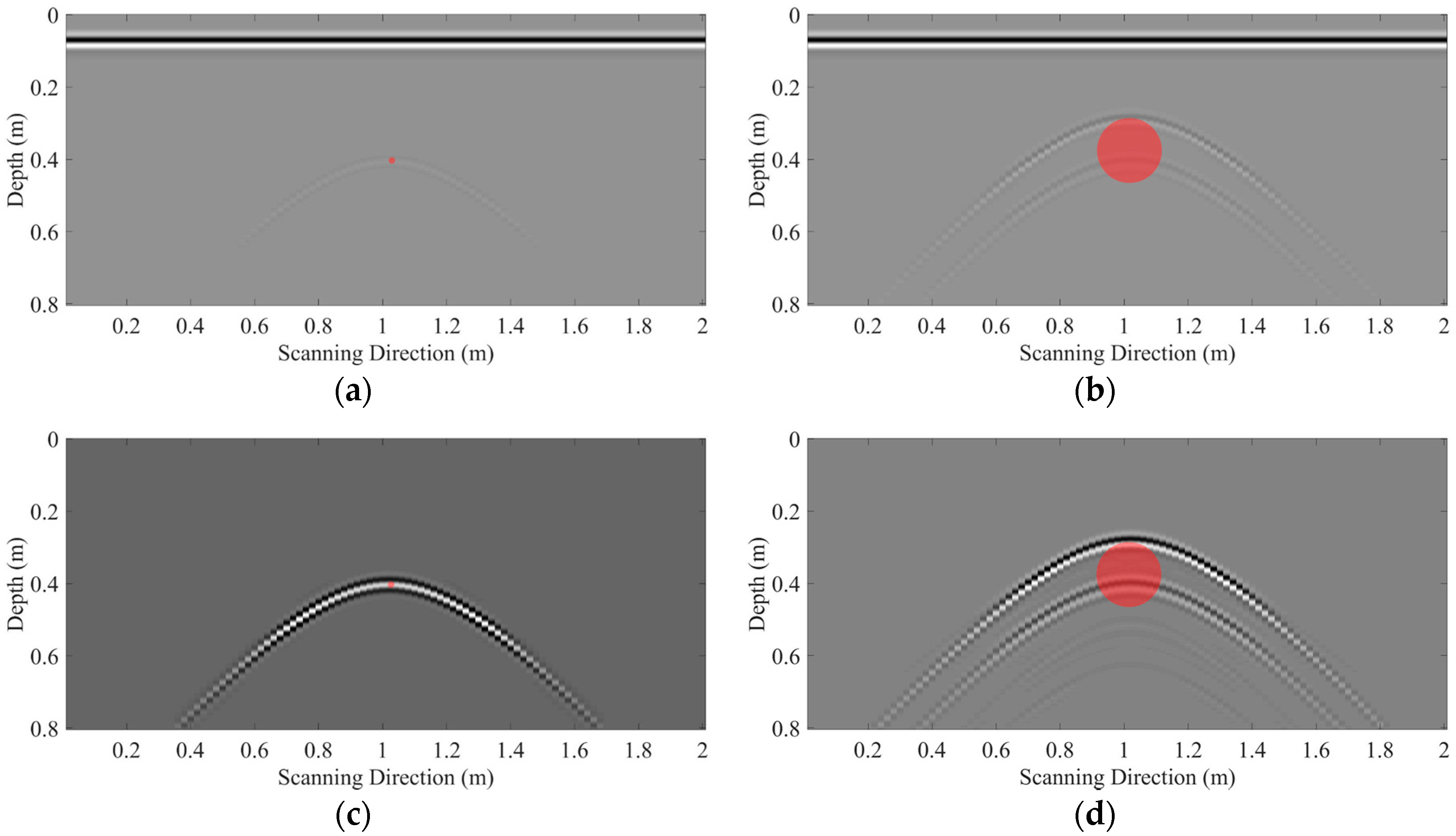
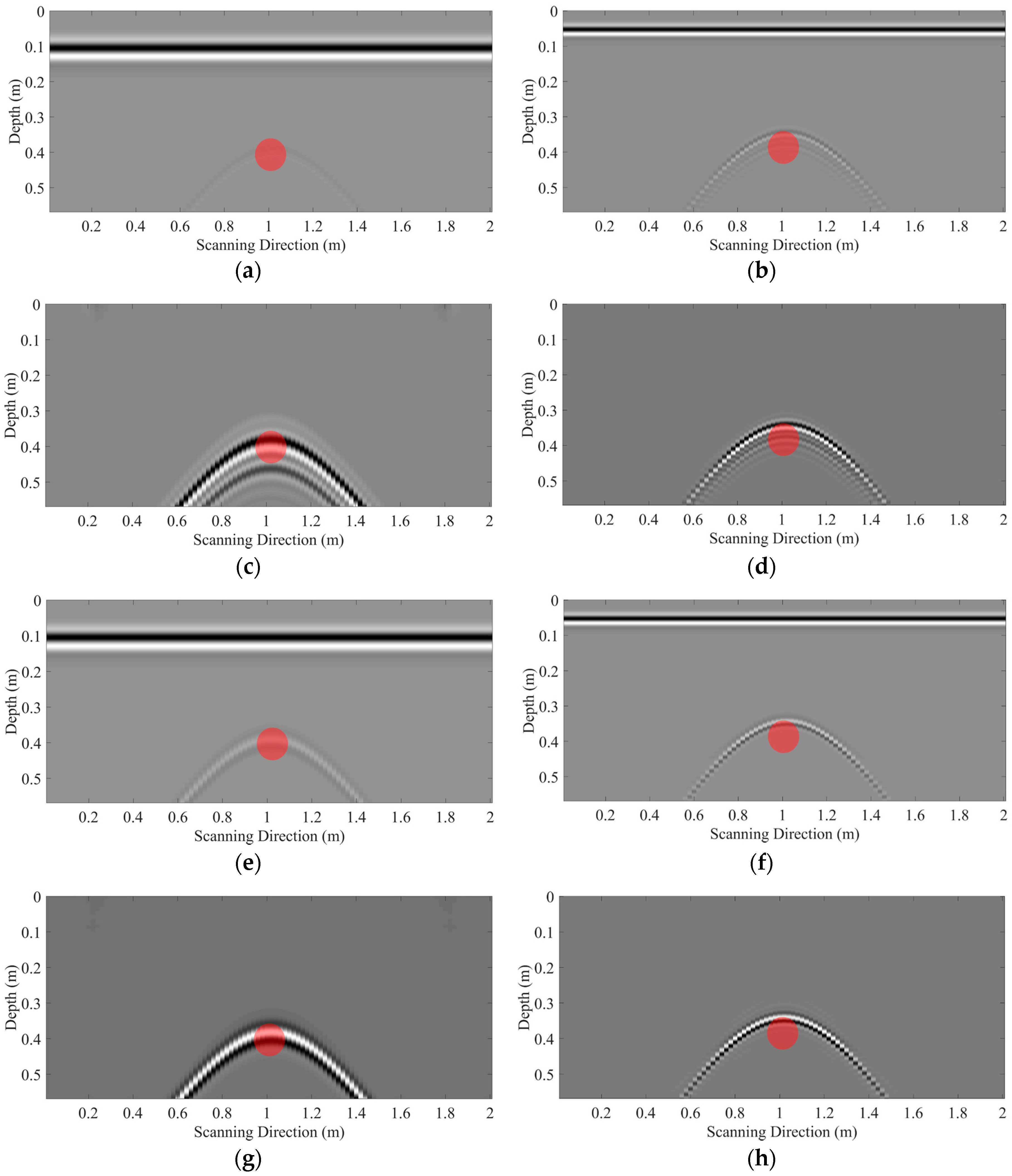
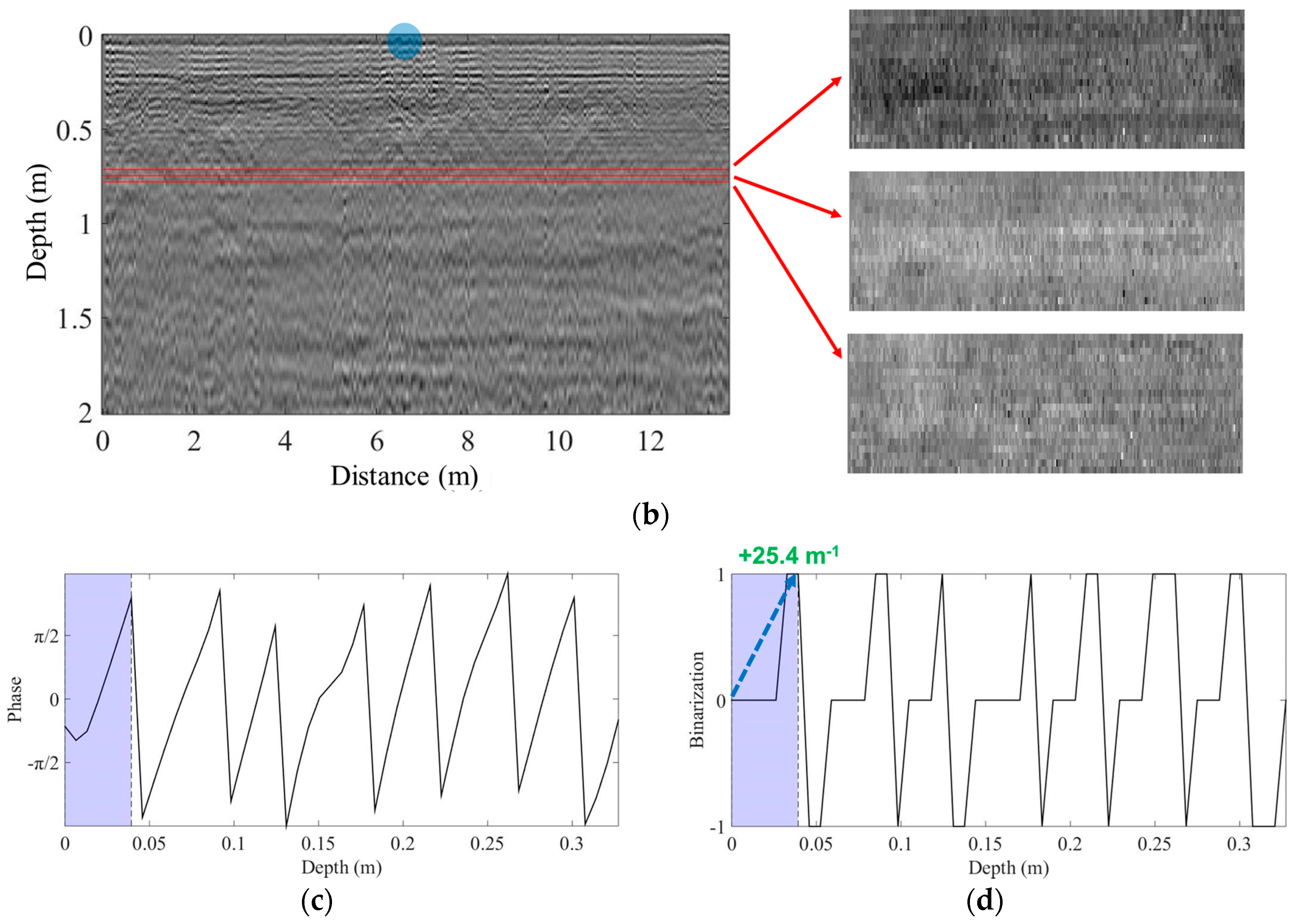
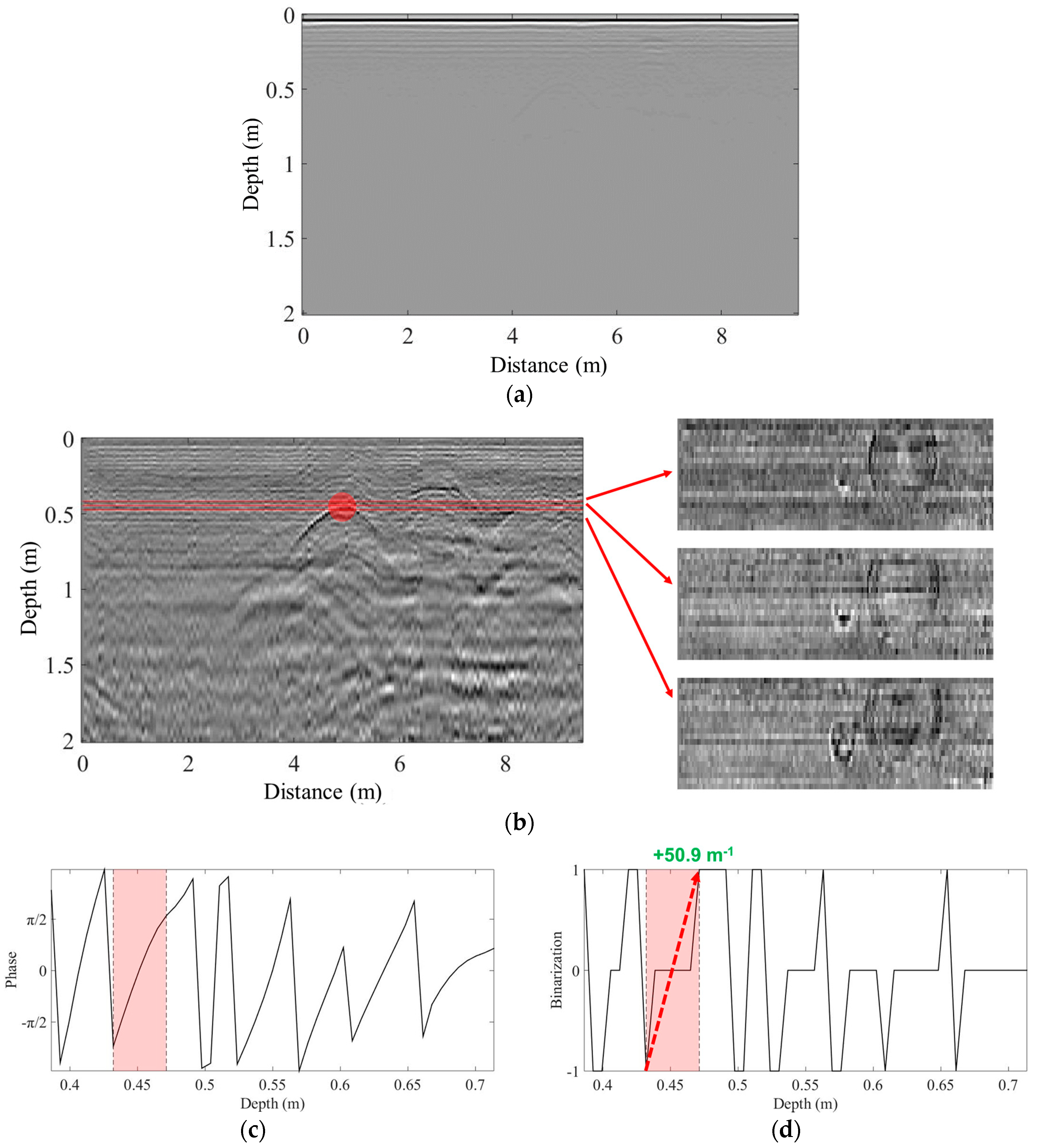
3.3. Classification Results for Models with Underground Objects
3.4. Robustness of the Proposed Technique to Complicated Underground Features
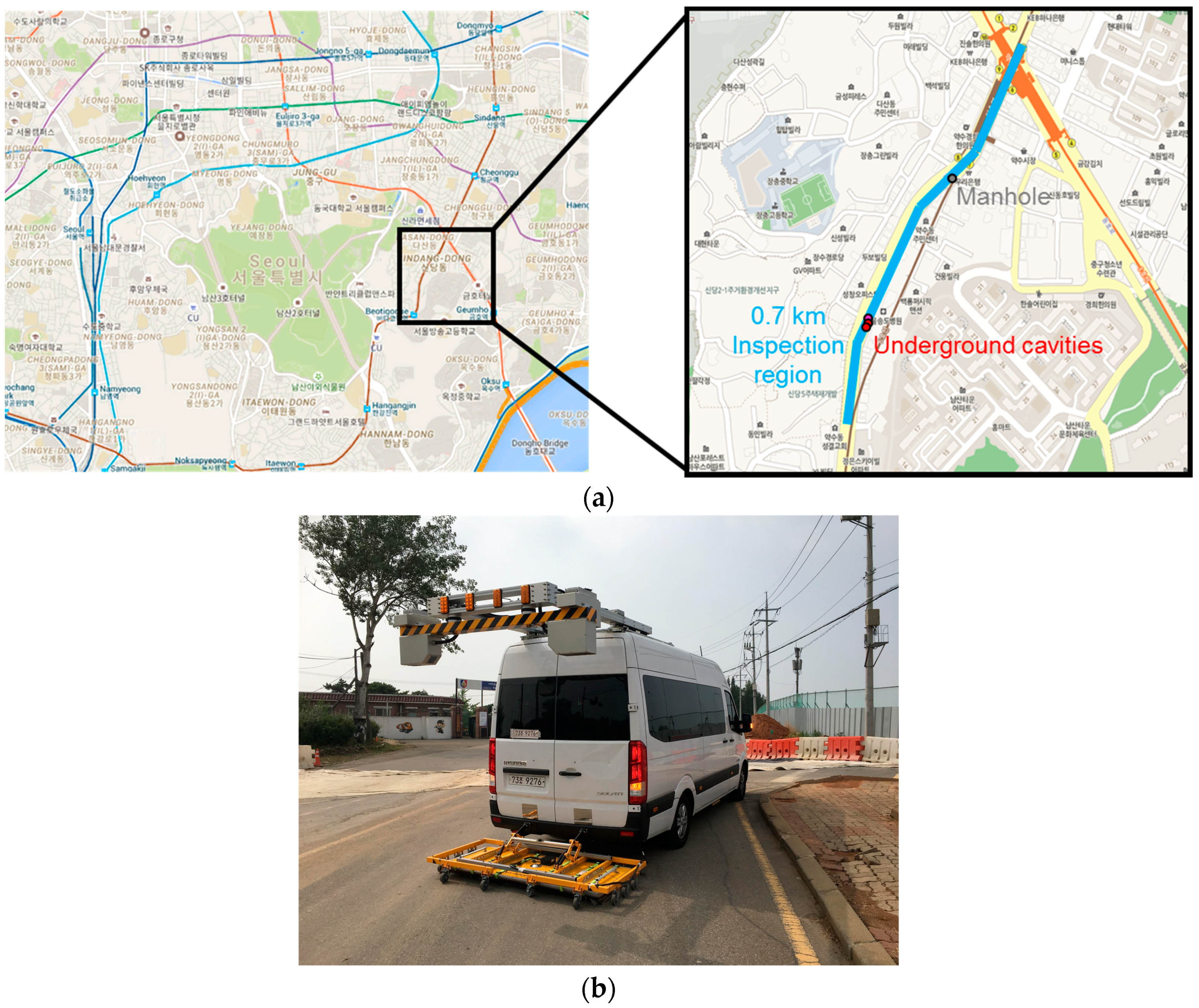
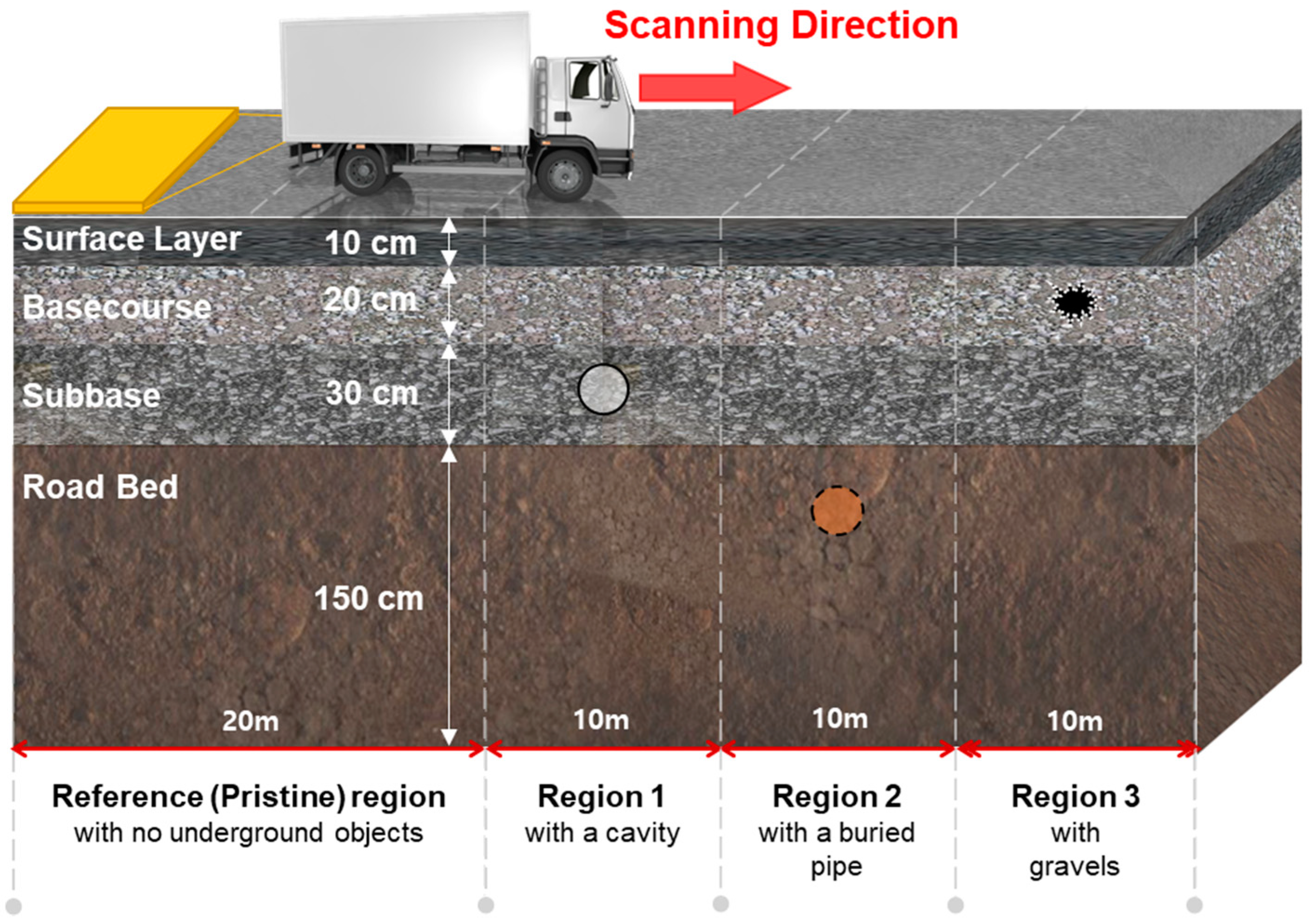
4. Experimental Result: Field Validation Tests Using 3D GPR Data
4.1. Experimental Setup
4.2. Underground Object Classification in the Pristine Region
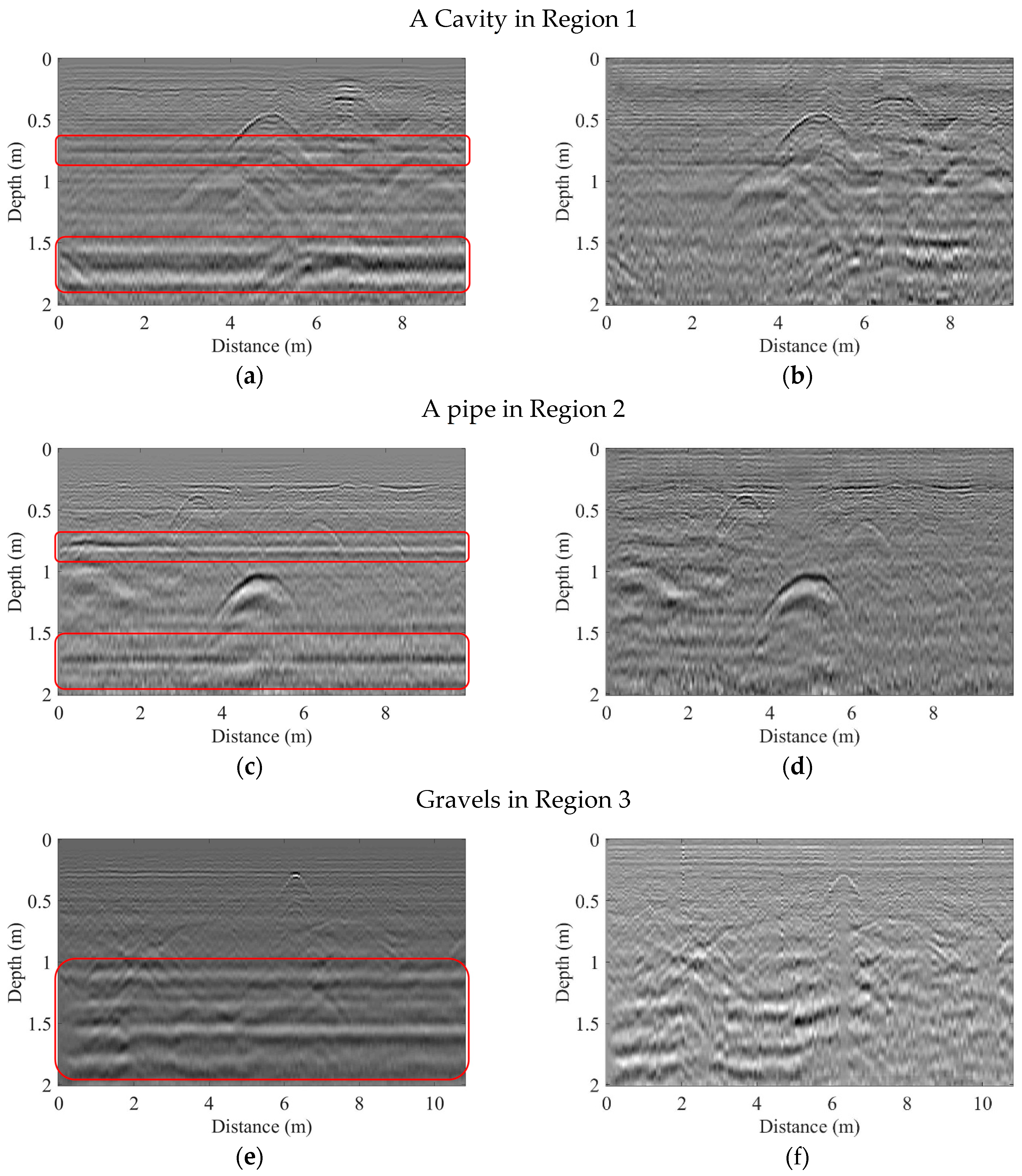
4.3. Underground Object Classification in the Regions with Underground Objects
5. Discussion
5.1. Underground Object Classification Compared with the Conventional Subtraction Method
5.2. Underground Object Classification Using a Phase Change Ratio
5.3. Limitations of the Proposed Technique
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Independent. Available online: http://www.independent.co.uk/news/world/asia/huge-sinkhole-opens-at-busy-chinese-intersection-a7000321.html (accessed on 21 July 2018).
- BBC. Available online: http://www.bbc.com/news/world-asia-37906065# (accessed on 21 July 2018).
- CBS Philly. Available online: http://philadelphia.cbslocal.com/2017/01/25/massive-sinkhole-opens-up-in-cheltenham-twp/ (accessed on 21 July 2018).
- Gutierrez, F.; Parise, M.; Waele, J.D.; Jourde, D. A review on natural and human-induced geohazards and impacts in karst. Earth-Sci. Rev. 2014, 138, 61–88. [Google Scholar] [CrossRef]
- Perlow, M. An overview of recent sinkhole problems in the Lehigh valley. In Proceedings of the Ninth Multidisciplinary Conference on Sinkholes and the Engineering and Environmental Impacts of Karst, Huntsville, AL, USA, 6–10 September 2003. [Google Scholar]
- Daniels, D.J. Ground Penetrating Radar, 2nd ed.; The Intuition of Electrical Engineering: London, UK, 2004; ISBN 9780863413605. [Google Scholar]
- Nuzzo, L.; Leucci, G.; Negri, S.; Carrozzo, T.; Quarta, T. Application of 3D visualization techniques in the analysis of GPR data for archaeology. Ann. Geophys. 2002, 45, 321–337. [Google Scholar] [CrossRef]
- Conyers, L.B. Ground-Penetrating Radar for Archaeology, 3rd ed.; AltaMira Press: Plymouth, UK, 2013; ISBN 9780759123502. [Google Scholar]
- Barone, P.M. Understanding Buried Anomalies: A practical Guide to GPR; Lambert Academic Publishing: Saarbrücken, Germany, 2016; ISBN 9783659935794. [Google Scholar]
- Persico, R. Introduction to Ground Penetrating Radar: Inverse Scattering and Data Processing; Wiley-IEEE Press: Hoboken, NJ, USA, 2014; ISBN 9781118305003. [Google Scholar]
- Soldovieri, F.; Lopera, O.; Lambot, S. Combination of advanced inversion techniques for an accurate target localization via GPR for demining application. IEEE Trans. Geosci. Remote Sens. 2010, 49, 451–461. [Google Scholar] [CrossRef]
- Singh, N.K. Ground penetrating radar (GPR) ‘Mineral base profiling and orebody optimization’. In Proceedings of the 6th International Heavy Minerals Conference, Hluhluwe, South Africa, 9–14 September 2007. [Google Scholar]
- Cardarelli, E.; Marrone, C.; Orlando, L. Evaluation of tunnel stability using integrated geophysical methods. J. Appl. Geophys. 2003, 52, 93–102. [Google Scholar] [CrossRef]
- Hammon, W.S., III; Mcmechan, G.A.; Zeng, X. Forensic GPR: Finite-difference simulations of responses from buried human remains. J. Appl. Geophys. 2000, 45, 171–186. [Google Scholar] [CrossRef]
- Batayneh, A.T.; Abdelruhman, A.A.; Moumani, K.A. Use of ground-penetrating radar for assessment of potential sinkhole conditions: An example from Ghor al Haditha area, Jordan. Environ. Geol. 2002, 41, 977–983. [Google Scholar] [CrossRef]
- Pueyo-Anchuela, O.; Pocovi Juan, A.; Soriano, M.A.; Casas-Sainz, A.M. Characterization of karst hazards from the perspective of the doline triangle using GPR-Examples from central Ebro Basin (Spain). Eng. Geol. 2009, 108, 225–236. [Google Scholar] [CrossRef]
- Rodriguez, V.; Gutierrez, F.; Green, A.G.; Carbonel, D.; Horstmeyer, H.; Schmelzbach, C. Characterizing sagging and collapse sinkholes in a mantled karst by means of ground penetrating radar (GPR). Environ. Eng. Geosci. 2014, 20, 109–132. [Google Scholar] [CrossRef]
- Benedetto, A.; Tosti, F.; Ciampoli, L.; Amico, F.D. An overview of ground-penetrating radar signal processing techniques for road inspections. Sig. Proc. 2017, 132, 201–209. [Google Scholar] [CrossRef] [Green Version]
- Annan, A.P. Practical Processing of GPR Data; Sensors and Software Inc.: Mississauga, ON, Canada, 1999. [Google Scholar]
- Horstmeyer, H.; Gurtner, M.; Buker, F.; Green, A.G. Processing 2-D and 3-D georadar data: Some special requirements. In Proceedings of the 2nd Meeting Environmental and Engineering Geophysics Society (EEGS-ES), Nantes, France, 2–5 September 1996. [Google Scholar]
- Takahashi, K.; Igel, J.; Preetz, H.; Kuroda, S. Basics and application of ground-penetrating radar as a tool for monitoring irrigation process. In Problmes, Perspectives and Challenges of Agricultural Water Management; Kumar, M., Ed.; InTech Europe: Rijeka, Croatia, 2012; ISBN 9789535101178. [Google Scholar]
- Griffiths, D. Introduction to Electrodynamics, 4th ed.; Cambridge University Press: New York, NY, USA, 2017; ISBN 9781108420419. [Google Scholar]
- Jol, H.M. Ground Penetrating Radar Theory and Applications; Elsevier Science: Oxford, UK, 2009; ISBN 9780444533487. [Google Scholar]
- Sadiku, M. Elements of Electromagnetics, 6th ed.; Oxford University Press: Oxford, UK, 2014; ISBN 9780199321384. [Google Scholar]
- Anton, H.; Busby, R.C. Contemporary Linear Algebra; Wiley: New York, NY, USA, 2003; ISBN 9780471163626. [Google Scholar]
- Park, B.; Sohn, H. Accelerated damage visualization using binary search with fixed pitch-catch distance laser ultrasonic scanning. Smart Mater. Struct. 2017, 26, 1. [Google Scholar] [CrossRef]
- Gribonval, R.; Nielsen, M. Sparse representations in unions of bases. IEEE Trans. Inform. Theory 2003, 49, 3320–3325. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Donoho, D. Basis pursuit. In Proceedings of the 28th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 31 October–2 November 1994. [Google Scholar]
- L1-MAGIC. Available online: https://statweb.stanford.edu/~candes/l1magic/ (accessed on 6 September 2018).
- Warren, C.; Giannopoulos, A.; Giannakis, I. gprMax: Open source software to simulate electromagnetic wave propagation for ground penetrating radar. Comp. Phys. Commun. 2016, 209, 163–170. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Region | Underground Object | Phase Change Ratio | Comparison with the Reference |
|---|---|---|---|
| Reference | - | +25.4 m−1 | - |
| 1 | Cavity | +50.9 m−1 | In-phase |
| 2 | Pipe | −43.7 m−1 | Out-of-phase |
| 3 | Gravels | −25.4 m−1 | Out-of-phase |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, B.; Kim, J.; Lee, J.; Kang, M.-S.; An, Y.-K. Underground Object Classification for Urban Roads Using Instantaneous Phase Analysis of Ground-Penetrating Radar (GPR) Data. Remote Sens. 2018, 10, 1417. https://doi.org/10.3390/rs10091417
Park B, Kim J, Lee J, Kang M-S, An Y-K. Underground Object Classification for Urban Roads Using Instantaneous Phase Analysis of Ground-Penetrating Radar (GPR) Data. Remote Sensing. 2018; 10(9):1417. https://doi.org/10.3390/rs10091417
Chicago/Turabian StylePark, Byeongjin, Jeongguk Kim, Jaesun Lee, Man-Sung Kang, and Yun-Kyu An. 2018. "Underground Object Classification for Urban Roads Using Instantaneous Phase Analysis of Ground-Penetrating Radar (GPR) Data" Remote Sensing 10, no. 9: 1417. https://doi.org/10.3390/rs10091417
APA StylePark, B., Kim, J., Lee, J., Kang, M. -S., & An, Y. -K. (2018). Underground Object Classification for Urban Roads Using Instantaneous Phase Analysis of Ground-Penetrating Radar (GPR) Data. Remote Sensing, 10(9), 1417. https://doi.org/10.3390/rs10091417