Retrieval of Chlorophyll a from Sentinel-2 MSI Data for the European Union Water Framework Directive Reporting Purposes



Abstract
:1. Introduction
2. Materials and Methods
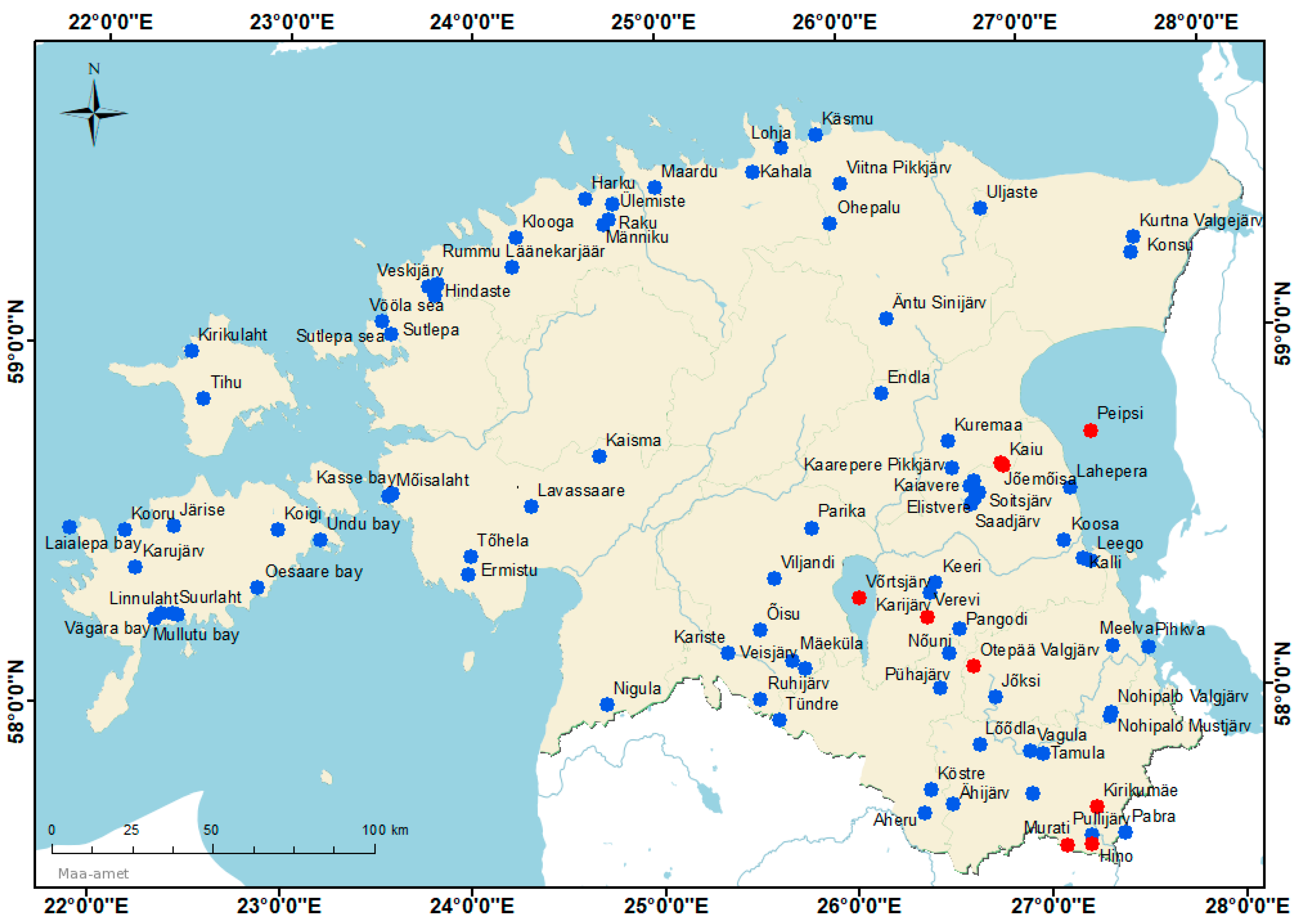
2.1. In Situ Data
2.2. S2 MSI Data
2.2.1. ACOLITE
2.2.2. C2RCC
2.2.3. POLYMER
2.2.4. Sen2Cor
2.2.5. Statistical Analysis
3. Results and Discussion
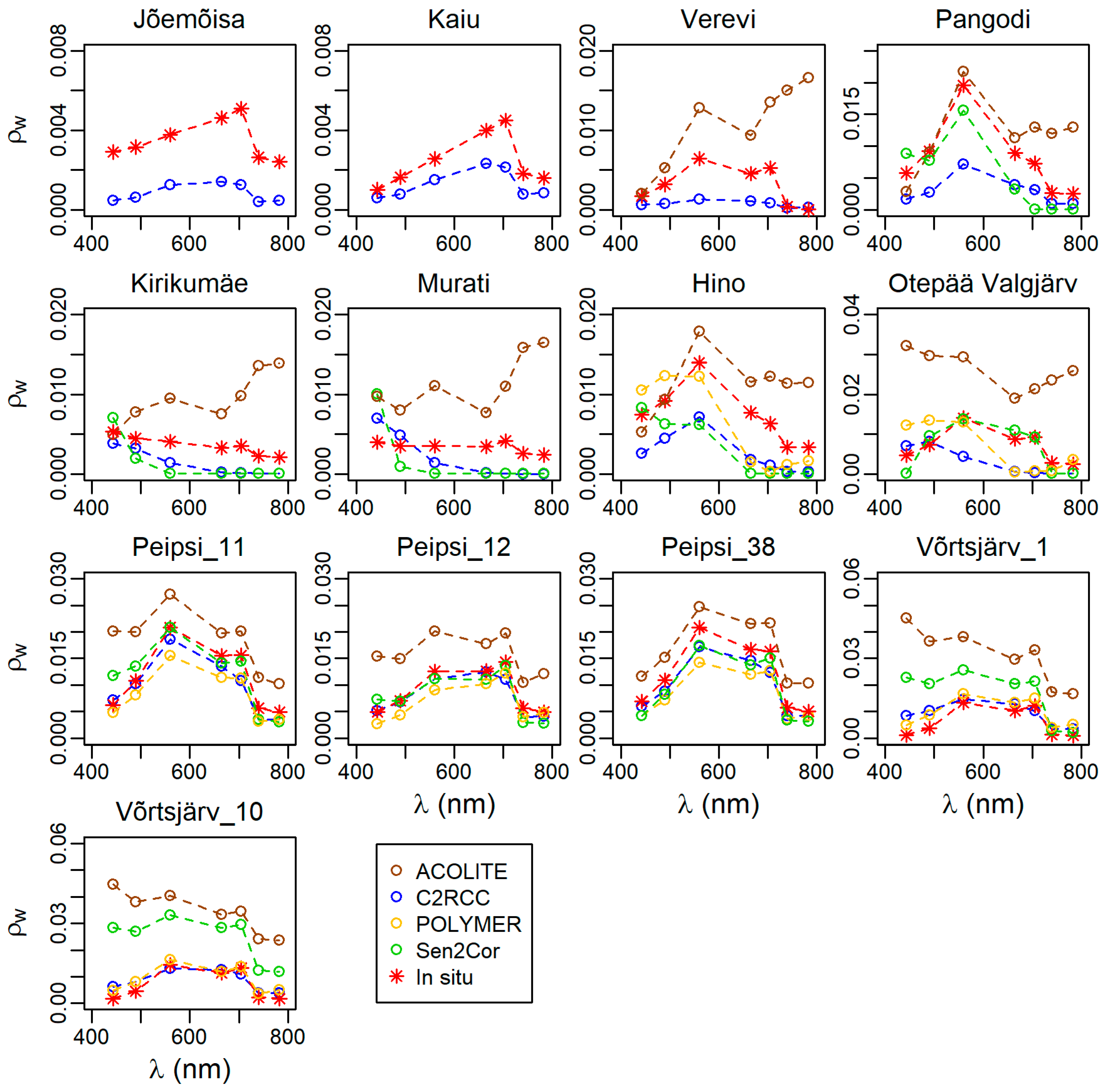
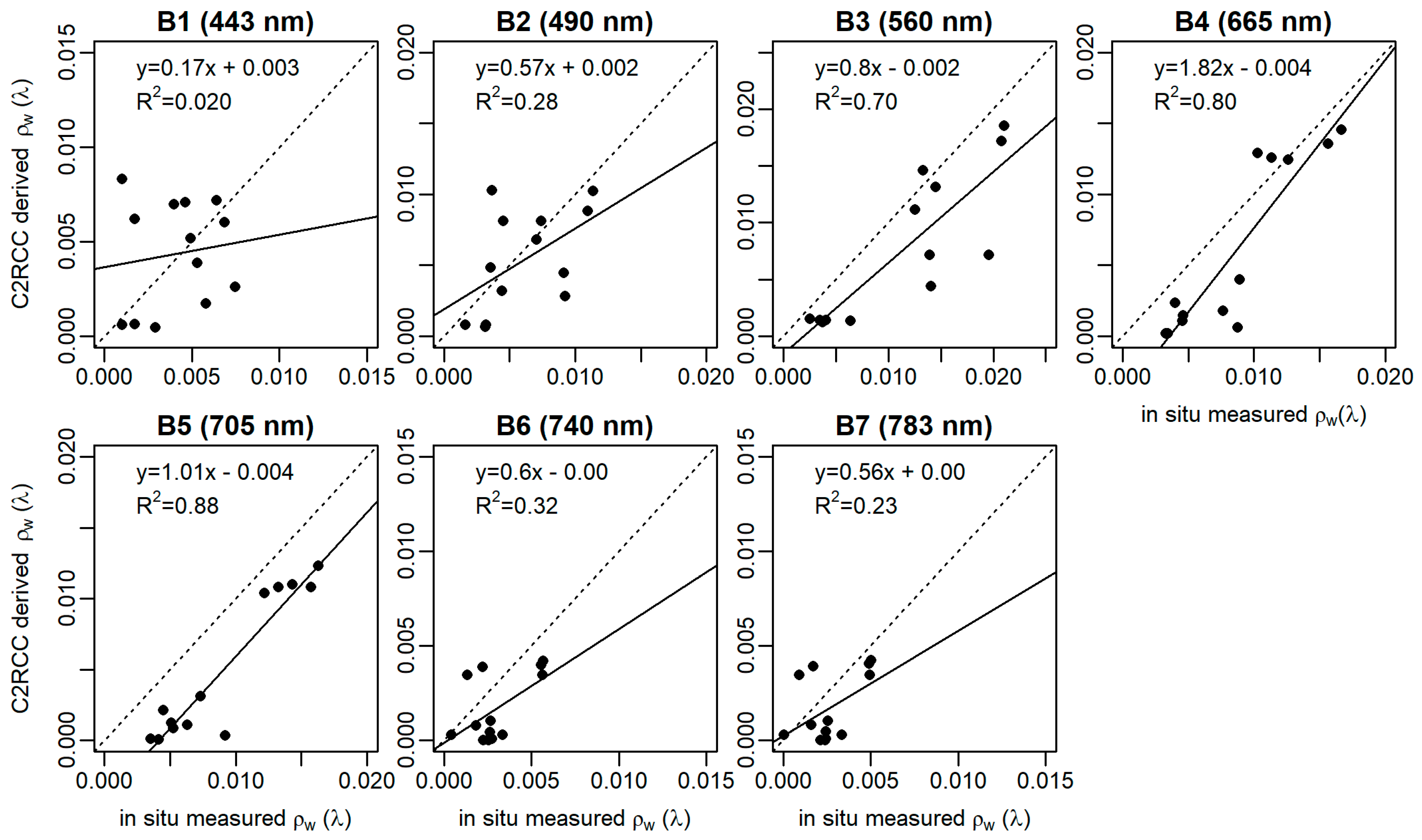
3.1. Validation of Water-Leaving Reflectance
3.1.1. Jõemõisa, Kaiu, Verevi and Pangodi
3.1.2. Kirikumäe, Murati and Hino
3.1.3. Otepää Valgjärv
3.1.4. Peipsi
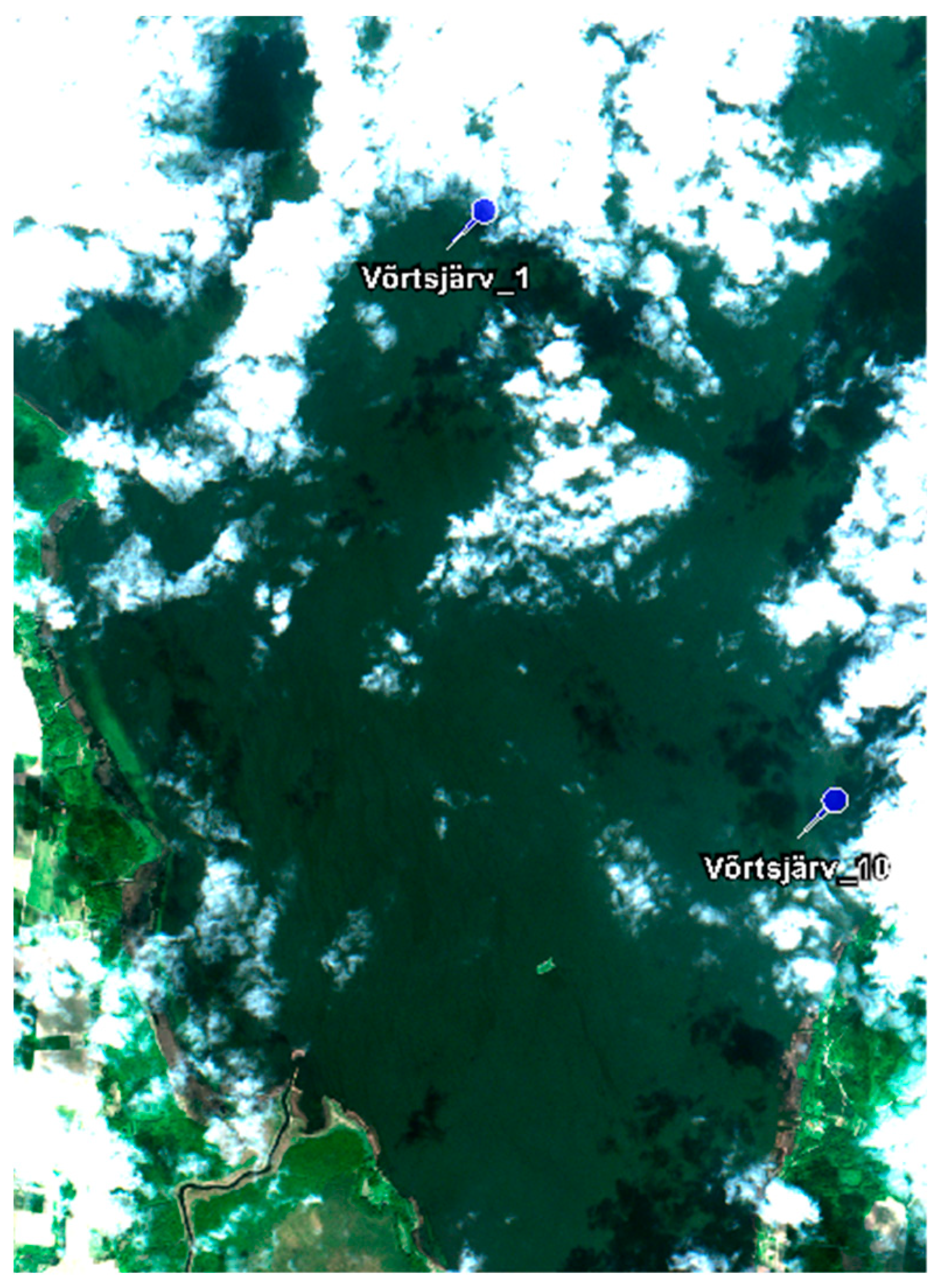
3.1.5. Võrtsjärv
3.1.6. Comparison of AC processors
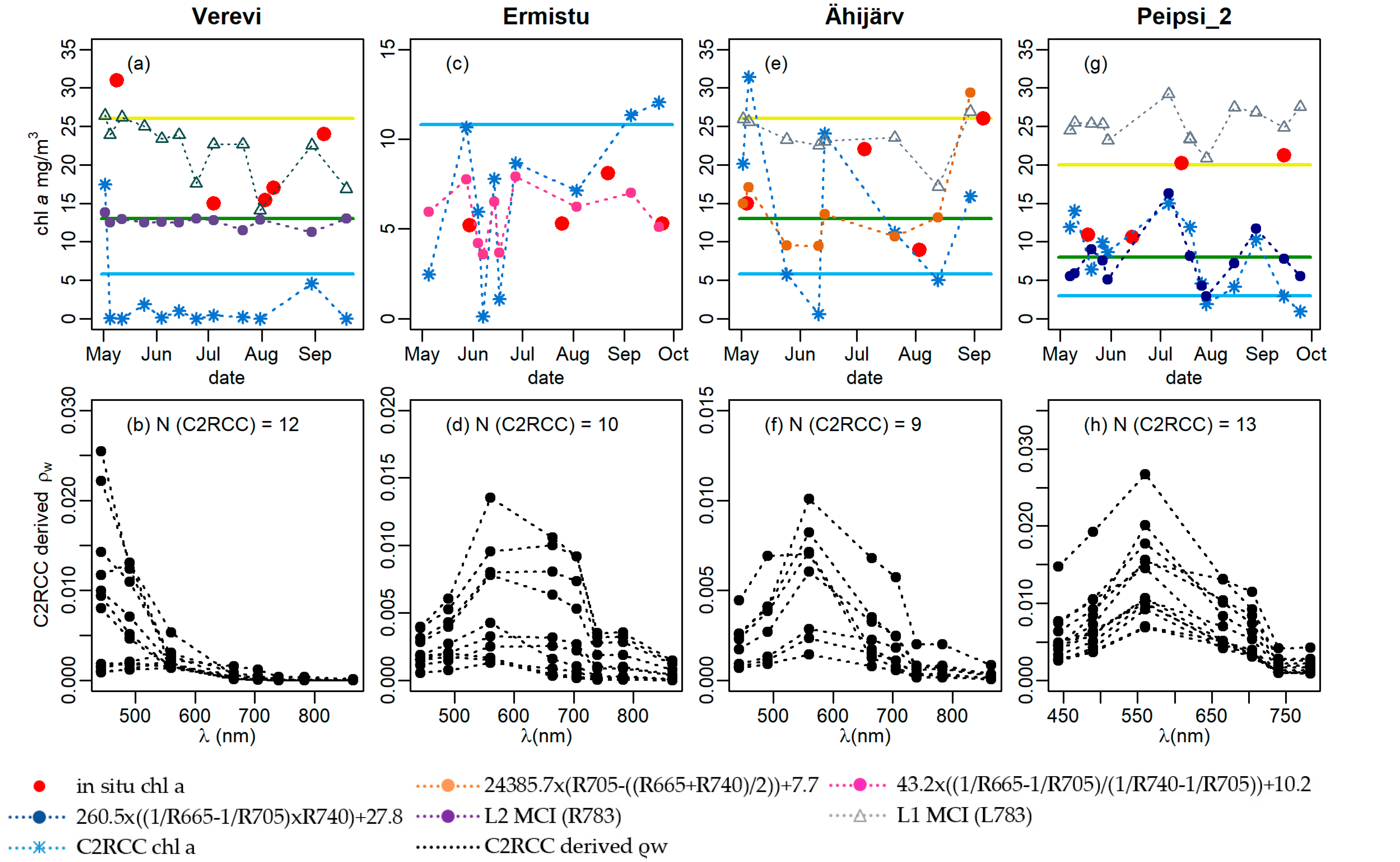
3.2. Comparing and Developing chl a Algorithms for S2 MSI
3.2.1. Spatial Analysis of C2RCC Derived ρw Product over Mesotrophic and Eutrophic Lakes
3.2.2. Ecological Status of Water in Lakes Based on chl a
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A









References
- The European Parliament, the Council of the European Union. WFD Directive 2000/60/EC of the European Parliament and of the Council of 23 October 2000 establishing a framework for Community action in the field of water policy. Off. J. Eur. Parliam. 2000, 327, 1–73. [Google Scholar] [CrossRef]
- EU Water Directors. Common Implementation Strategy for the Water Framework Directive and the Floods Directive, WFD Reporting Guidance 2016; EU: Brussels, Belgium, 2016. [Google Scholar]
- Ferreira, J.G.; Vale, C.; Soares, C.V.; Salas, F.; Stacey, P.E.; Bricker, S.B.; Silva, M.C.; Marques, J.C. Monitoring of coastal and transitional waters under the E.U. water framework directive. Environ. Monit. Assess. 2007, 135, 195–216. [Google Scholar] [CrossRef] [PubMed]
- Ministry of Environment Pinnaveekogumite Moodustamise Kord ja Nende Pinnaveekogumite Nimestik, Mille Seisundiklass Tuleb Määrata, Pinnaveekogumite Seisundiklassid ja Seisundiklassidele Vastavad Kvaliteedinäitajate Väärtused Ning Seisundiklasside Määramise kord-RT I, 25.11.2010. Available online: https://www.riigiteataja.ee/akt/125112010015 (accessed on 3 September 2018).
- Chen, Q.; Zhang, Y.; Hallikainen, M. Water quality monitoring using remote sensing in support of the EU water framework directive (WFD): A case study in the Gulf of Finland. Environ. Monit. Assess. 2007, 124, 157–166. [Google Scholar] [CrossRef] [PubMed]
- Matthews, M.W. A current review of empirical procedures of remote sensing in Inland and near-coastal transitional waters. Int. J. Remote Sens. 2011, 32, 6855–6899. [Google Scholar] [CrossRef]
- Salem, S.I.; Strand, M.H.; Higa, H.; Kim, H.; Kazuhiro, K.; Oki, K.; Oki, T. Evaluation of meris chlorophyll-a retrieval processors in a complex turbid lake kasumigaura over a 10-year mission. Remote Sens. 2017, 9, 1022. [Google Scholar] [CrossRef]
- Chen, Q.; Zhang, Y.; Ekroos, A.; Hallikainen, M. The role of remote sensing technology in the EU water framework directive (WFD). Environ. Sci. Polic. 2004, 7, 267–276. [Google Scholar] [CrossRef]
- Salem, S.I.; Higa, H.; Kim, H.; Kobayashi, H.; Oki, K.; Oki, T. Assessment of chlorophyll-a algorithms considering different trophic statuses and optimal bands. Sensors (Switzerland) 2017, 17, 1746. [Google Scholar] [CrossRef] [PubMed]
- Lins, R.C.; Martinez, J.M.; Marques, D.D.; Cirilo, J.A.; Fragoso, C.R. Assessment of chlorophyll-a remote sensing algorithms in a productive tropical estuarine-lagoon system. Remote Sens. 2017, 9, 516. [Google Scholar] [CrossRef]
- Werdell, P.J.; McKinna, L.I.W.; Boss, E.; Ackleson, S.G.; Craig, S.E.; Gregg, W.W.; Lee, Z.; Maritorena, S.; Roesler, C.S.; Rousseaux, C.S.; et al. An overview of approaches and challenges for retrieving marine inherent optical properties from ocean color remote sensing. Prog. Oceanogr. 2018, 160, 186–212. [Google Scholar] [CrossRef]
- Duan, H.; Zhang, Y.; Zhang, B.; Song, K.; Wang, Z. Assessment of chlorophyll-a concentration and trophic state for lake chagan using landsat TM and field spectral data. Environ. Monit. Assess. 2007, 129, 295–308. [Google Scholar] [CrossRef]
- Moses, W.J.; Gitelson, A.A.; Berdnikov, S.; Povazhnyy, V. Estimation of chlorophyll-a concentration in case II waters using MODIS and MERIS data—Successes and challenges. Environ. Res. Lett. 2009, 4. [Google Scholar] [CrossRef]
- Wozniak, M.; Bradtke, K.M.; Krezel, A. Comparison of satellite chlorophyll a algorithms for the Baltic Sea. J. Appl. Remote Sens. 2014, 8. [Google Scholar] [CrossRef]
- Zhang, Y.; Ma, R.; Duan, H.; Loiselle, S.; Xu, J. A spectral decomposition algorithm for estimating chlorophyll-a concentrations in Lake Taihu, China. Remote Sens. 2014, 6, 5090–5106. [Google Scholar] [CrossRef]
- Carstensen, J.; Klais, R.; Cloern, J.E. Phytoplankton blooms in estuarine and coastal waters: Seasonal patterns and key species. Estuar. Coast. Shelf Sci. 2015, 162, 98–109. [Google Scholar] [CrossRef] [Green Version]
- Zhang, F.; Li, J.; Shen, Q.; Zhang, B.; Wu, C.; Wu, Y.; Wang, G.; Wang, S.; Lu, Z. Algorithms and schemes for chlorophyll a estimation by remote sensing and optical classification for turbid lake Taihu, China. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 350–364. [Google Scholar] [CrossRef]
- Giardino, C.; Bresciani, M.; Stroppiana, D.; Oggioni, A.; Morabito, G. Optical remote sensing of lakes: An overview on Lake Maggiore. J. Limnol. 2014, 73, 201–214. [Google Scholar] [CrossRef]
- Gohin, F.; Saulquin, B.; Oger-Jeanneret, H.; Lozac’h, L.; Lampert, L.; Lefebvre, A.; Riou, P.; Bruchon, F. Towards a better assessment of the ecological status of coastal waters using satellite-derived chlorophyll-a concentrations. Remote Sens. Environ. 2008, 112, 3329–3340. [Google Scholar] [CrossRef]
- Bresciani, M.; Stroppiana, D.; Odermatt, D.; Morabito, G.; Giardino, C. Assessing remotely sensed chlorophyll-a for the implementation of the Water Framework Directive in European perialpine lakes. Sci. Total Environ. 2011, 409, 3083–3091. [Google Scholar] [CrossRef] [Green Version]
- Alikas, K.; Kangro, K.; Randoja, R.; Philipson, P.; Asuküll, E.; Pisek, J.; Reinart, A. Satellite-based products for monitoring optically complex inland waters in support of EU Water Framework Directive. Int. J. Remote Sens. 2015, 36, 4446–4468. [Google Scholar] [CrossRef]
- Philipson, P.; Eriksso, K.; Stelzer, K. MERIS data for monitoring of small and medium sized humic Swedish lakes. In Proceedings of the Measuring and Modeling of Multi-Scale Interactions in the Marine Environment—IEEE/OES Baltic International Symposium 2014, BALTIC 2014, Tallinn, Estonia, 27–29 May 2014. [Google Scholar]
- Attila, J.; Kauppila, P.; Kallio, K.Y.; Alasalmi, H.; Keto, V.; Bruun, E.; Koponen, S. Applicability of Earth Observation chlorophyll-a data in assessment of water status via MERIS—With implications for the use of OLCI sensors. Remote Sens. Environ. 2018, 212, 273–287. [Google Scholar] [CrossRef]
- Bresciani, M.; Cazzaniga, I.; Austoni, M.; Sforzi, T.; Buzzi, F.; Morabito, G.; Giardino, C. Mapping phytoplankton blooms in deep subalpine lakes from Sentinel-2A and Landsat-8. Hydrobiologia 2018, 824, 197–214. [Google Scholar] [CrossRef] [Green Version]
- Grendaitė, D.; Stonevičius, E. Chlorophyll-a concentration retrieval in eutrophic lakes in Lithuania from Sentinel-2 data. Geol. Geogr. 2018, 4, 15–28. [Google Scholar] [CrossRef]
- Klein, T.; Nilsson, M.; Persson, A.; Håkansson, B. From Open Data to Open Analyses—New Opportunities for Environmental Applications? Environments 2017, 4, 32. [Google Scholar] [CrossRef]
- Morel, A.; Prieur, L. Analysis of variations in ocean color. Limnol. Oceanogr. 1977, 22, 709–722. [Google Scholar] [CrossRef]
- Odermatt, D.; Gitelson, A.; Brando, V.E.; Schaepman, M. Review of constituent retrieval in optically deep and complex waters from satellite imagery. Remote Sens. Environ. 2012, 118, 116–126. [Google Scholar] [CrossRef] [Green Version]
- Hieronymi, M.; Krasemann, H.; Müller, D.; Brockmann, C.; Ruescas, A.; Stelzer, K.; Nechad, B.; Ruddick, K.; Simis, S.; Tilstone, G.; et al. Ocean colour remote sensing of extreme case-2 waters. In Proceedings of the conference held Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016. [Google Scholar]
- Shanmugam, P. CAAS: An atmospheric correction algorithm for the remote sensing of complex waters. Ann. Geophys. 2012, 30, 203–220. [Google Scholar] [CrossRef]
- Moore, G.F.; Aiken, J.; Lavender, S.J. The atmospheric correction of water colour and the quantitative retrieval of suspended particulate matter in Case II waters: Application to MERIS. Int. J. Remote Sens. 1999, 20, 1713–1733. [Google Scholar] [CrossRef]
- IOCCG. Remote Sensing of Ocean Colour in Coastal, and Other Optically-Complex, Waters; Sathyendranath, S., Ed.; Reports of the International Ocean-Colour Coordinating Group, No. 3; IOCCG: Dartmouth, MA, Canada, 2000. [Google Scholar]
- Candiani, G.; Giardino, C.; Brando, V.E. Adjacency effects and bio-optical model regionalisation: Meris data to assess lake water quality in the subalpine ecoregion. In Proceedings of the Envisat Symposium, Montreux, Switzerland, 23–27 April 2007. [Google Scholar]
- Sterckx, S.; Knaeps, E.; Ruddick, K. Detection and correction of adjacency effects in hyperspectral airborne data of coastal and inland waters: The use of the near infrared similarity spectrum. Int. J. Remote Sens. 2011, 32, 6479–6505. [Google Scholar] [CrossRef]
- Fell, F.; Fischer, E.; Schaale, M.; Schroder, T. Retrieval of chlorophyll concentration from MERIS measurements in the spectral range of the sun-induced chlorophyll fluorescence. Proc. SPIE 2003, 4892, 116–123. [Google Scholar] [CrossRef]
- Gitelson, A.A. The peak near 700 nm on radiance spectra of algae and water: Relationships of its magnitude and position with chlorophyll. Int. J. Remote Sens. 1992, 13, 3367–3373. [Google Scholar] [CrossRef]
- Matthews, M.W.; Bernard, S.; Winter, K. Remote sensing of cyanobacteria-dominant algal blooms and water quality parameters in Zeekoevlei, a small hypertrophic lake, using MERIS. Remote Sens. Environ. 2010, 114, 2070–2087. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Gritz, Y.; Merzlyak, M.N. Relationships between leaf chlorophyll content and spectral reflectance and algorithms for non-destructive chlorophyll assessment in higher plant leaves. J. Plant Physiol. 2003. [Google Scholar] [CrossRef] [PubMed]
- Zimba, P.V.; Gitelson, A. Remote estimation of chlorophyll concentration in hyper-eutrophic aquatic systems: Model tuning and accuracy optimization. Aquaculture 2006, 256, 272–286. [Google Scholar] [CrossRef]
- Le, C.; Li, Y.; Zha, Y.; Sun, D.; Huang, C.; Lu, H. A four-band semi-analytical model for estimating chlorophyll a in highly turbid lakes: The case of Taihu Lake, China. Remote Sens. Environ. 2009, 113, 1175–1182. [Google Scholar] [CrossRef]
- Gower, J.; King, S.; Borstad, G.; Brown, L. Detection of intense plankton blooms using the 709 nm band of the MERIS imaging spectrometer. Int. J. Remote Sens. 2005, 26, 2005–2012. [Google Scholar] [CrossRef]
- Gower, J.F.R.; Doerffer, R.; Borstad, G.A. Interpretation of the 685nm peak in water-leaving radiance spectra in terms of fluorescence, absorption and scattering, and its observation by MERIS. Int. J. Remote Sens. 1999, 20, 1771–1786. [Google Scholar] [CrossRef]
- Riiklik Keskkonnaseire programm, pinnavee seire allprogramm; Keskkonnaagentuur: Tallinn, Estonia, 2018.
- Maa-amet Web Map Server. Available online: https://geoportaal.maaamet.ee/eng/ (accessed on 13 September 2018).
- Mandanici, E.; Bitelli, G. Preliminary comparison of sentinel-2 and landsat 8 imagery for a combined use. Remote Sens. 2016, 8, 1014. [Google Scholar] [CrossRef]
- European Space Agency Sentinel-2 Web Page. Available online: https://sentinel.esa.int/web/sentinel/missions/sentinel-2 (accessed on 6 December 2018).
- Pahlevan, N.; Sarkar, S.; Franz, B.A.; Balasubramanian, S.V.; He, J. Sentinel-2 MultiSpectral Instrument (MSI) data processing for aquatic science applications: Demonstrations and validations. Remote Sens. Environ. 2017, 201, 47–56. [Google Scholar] [CrossRef]
- Ruddick, K.G.; De Cauwer, V.; Park, Y.J.; Moore, G. Seaborne measurements of near infrared water-leaving reflectance: The similarity spectrum for turbid waters. Limnol. Oceanogr. 2006, 51, 1167–1179. [Google Scholar] [CrossRef] [Green Version]
- Tilstone, G.H.; Moore, G.F.; Doerffer, R.; Røttgers, R.; Ruddick, K.G.; Pasterkamp, R.; Jørgensen, P.V. Regional Validation of MERIS Chlorophyll products in North Sea REVAMP Protocols Regional Validation of MERIS Chlorophyll products. In Proceedings of the Working meeting on MERIS and AATSR Calibration and Geophysical Validation (ENVISAT MAVT-2003), Frascati, Italy, 20–24 October 2003; pp. 1–77. [Google Scholar]
- GLaSS Deliverable 3.4, 2014. Global Lakes Sentinel Services, D3.4: Adapted Water Quality Algorithms. TO, WI, SYKE, EOMAP, VU/VUmc, BC, CNR. Available online: www.glass-project.eu/downloads (accessed on 12 December 2018).
- Jeffrey, S.W.; Humphrey, G.F. New spectrophotometric equations for determining chlorophylls a, b, c1 and c2 in higher plants, algae and natural phytoplankton. Biochem. Und Physiol. Pflanz. 1975, 167, 191–194. [Google Scholar] [CrossRef]
- Vanhellemont, Q.; Ruddick, K. Atmospheric correction of metre-scale optical satellite data for inland and coastal water applications. Remote Sens. Environ. 2018, 216, 586–597. [Google Scholar] [CrossRef]
- Vanhellemont, Q.; Ruddick, K. Acolite for Sentinel-2: Aquatic applications of MSI imagery. In Proceedings of the Conference Held Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016. [Google Scholar]
- RBINS. Acolite Python User Manual; RBINS: Brussels, Belgium, 2018. [Google Scholar]
- Brockmann, C.; Doerffer, R.; Marco, P.; Stelzer, K.; Embacher, S.; Ruescas, A. Evolution Of The C2RCC Neural Network For Sentinel 2 and 3 For The Retrieval of Ocean. In Proceedings of the conference held Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016. [Google Scholar]
- Plymouth Marine Laboratory Ocean Colour Climate Change Initiative (OC-CCI); Phase One: Copenhagen, Denmark, 2012.
- Steinmetz, F.; Deschamps, P.-Y.; Ramon, D. Atmospheric correction in presence of sun glint: Application to MERIS. Opt. Express 2011, 19, 9783. [Google Scholar] [CrossRef] [PubMed]
- Uwe, M.-W.; Jerome, L.; Rudolf, R.; Ferran, G.; Marc, N. Sentinel-2 Level 2a Prototype Processor: Architecture, Algorithms and First Results. In Proceedings of the conference held on ESA Living Planet Symposium, Edinburgh, UK, 9–13 September 2013; pp. 3–10. [Google Scholar]
- Qin, P.; Simis, S.G.H.; Tilstone, G.H. Radiometric validation of atmospheric correction for MERIS in the Baltic Sea based on continuous observations from ships and AERONET-OC. Remote Sens. Environ. 2017, 200, 263–280. [Google Scholar] [CrossRef] [Green Version]
- Keskkonnaagentuur EELIS (Eesti Looduse Infosüsteem—Keskonnaregister). Available online: http://loodus.keskkonnainfo.ee/eelis/ (accessed on 6 June 2018).
- Mäemets, A. Eesti NSV Järved ja Nende Kaitse; Valgus: Tallinn, Estonia, 1977. [Google Scholar]
- Kutser, T.; Paavel, B.; Verpoorter, C.; Ligi, M.; Soomets, T.; Toming, K.; Casal, G. Remote sensing of black lakes and using 810 nm reflectance peak for retrieving water quality parameters of optically complex waters. Remote Sens. 2016, 8, 497. [Google Scholar] [CrossRef]
- Caballero, I.; Steinmetz, F.; Navarro, G. Evaluation of the first year of operational Sentinel-2A data for retrieval of suspended solids in medium to high-turbiditywaters. Remote Sens. 2018, 10, 982. [Google Scholar] [CrossRef]
- Dörnhöfer, K.; Göritz, A.; Gege, P.; Pflug, B.; Oppelt, N. Water constituents andwater depth retrieval from Sentinel-2A-A first evaluation in an oligotrophic lake. Remote Sens. 2016, 8, 941. [Google Scholar] [CrossRef]
- Chavula, G.; Brezonik, P.; Thenkabail, P.; Johnson, T.; Bauer, M. Estimating chlorophyll concentration in Lake Malawi from MODIS satellite imagery. Phys. Chem. Earth 2009, 34, 755–760. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Gurlin, D.; Moses, W.J.; Barrow, T. A bio-optical algorithm for the remote estimation of the chlorophyll-a concentration in case 2 waters. Environ. Res. Lett. 2009, 4. [Google Scholar] [CrossRef]
- O’Reilly, J.E.; Maritorena, S.; Mitchell, B.G.; Siegel, D.A.; Carder, K.L.; Garver, S.A.; Kahru, M.; McClain, C.R. Ocean color chlorophyll algorighms for SeaWiFS. J. Geophys. Res. 1998, 103, 24937–24953. [Google Scholar] [CrossRef]
- Kahru, M.; Mitchell, B.G. Spectral reflectance and absorption of a massive red tide off southern California. J. Geophys. Res. Ocean. 1998, 103, 21601–21609. [Google Scholar] [CrossRef] [Green Version]
- Toming, K.; Kutser, T.; Laas, A.; Sepp, M.; Paavel, B.; Nõges, T. First experiences in mapping lakewater quality parameters with sentinel-2 MSI imagery. Remote Sens. 2016, 8, 640. [Google Scholar] [CrossRef]
- Koponen, S.; Attila, J.; Pulliainen, J.; Kallio, K.; Pyhälahti, T.; Lindfors, A.; Rasmus, K.; Hallikainen, M. A case study of airborne and satellite remote sensing of a spring bloom event in the Gulf of Finland. Cont. Shelf Res. 2007, 27, 228–244. [Google Scholar] [CrossRef]
- Zhang, D.; Lavender, S.; Muller, J.P.; Walton, D.; Karlson, B.; Kronsell, J. Determination of phytoplankton abundances (Chlorophyll-a) in the optically complex inland water—The Baltic Sea. Sci. Total Environ. 2017, 601–602, 1060–1074. [Google Scholar] [CrossRef] [PubMed]
- Martins, V.S.; Barbosa, C.C.; de Carvalho, L.A.; Jorge, D.S.; Lobo, F.D.; Novo, E.M. Assessment of atmospheric correction methods for sentinel-2 MSI images applied to Amazon floodplain lakes. Remote Sens. 2017, 9, 322. [Google Scholar] [CrossRef]
- Alikas, K.; Kangro, K.; Reinart, A. Detecting cyanobacterial blooms in large North European lakes using the maximum chlorophyll index. Oceanologia 2010, 52, 237–257. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Lake | Water Surface Area | Stratification | Water Color | Amount of Chloride | pH | Number of Lakes |
|---|---|---|---|---|---|---|
| 1 | <10 km2 | Non-stratified | Dark/light | Low | Hard | 1 |
| 2 | <10 km2 | Non-stratified | Dark/light | Low | Moderate | 33 |
| 3 | <10 km2 | Stratified | Dark/light | Low | Moderate | 21 |
| 4 | <10 km2 | Non-stratified | Dark | Low | Soft | 10 |
| 5 | <10 km2 | Non-stratified | Light | Low | Soft | 8 |
| 6 (Võrtsjärv) | 100–300 km2 | Non-stratified | Light | Low | Moderate | 1 |
| 7 (Peipsi and Lämmijärv) | >1000 km2 | Non-stratified | Light | Low | Moderate | 2 |
| 8 | Coastal lakes | Non-stratified/stratified | Dark/light | High | Hard/Moderate/Soft | 13 |
| Type of Lake | Very Good | Good | Moderate | Bad | Very Bad |
|---|---|---|---|---|---|
| 1 | <1 | 1–2 | >2–3 | >3–5 | >5 |
| 2 | <10.8 | 10.8–28 | >28–52 | >52–215 | >215 |
| 3 | <5.8 | >5.8–13 | >13–26 | >26–104 | >104 |
| 4 | <10 | 10–20 | >20–30 | >30 | >30 |
| 5 | <5.4 | 5.4–13 | >13–26 | >26–103 | >103 |
| 6 | ≤24 | >24–38 | >38–45 | >45–51 | >51 |
| 7 | ≤3 (Peipsi), ≤6 (Lämmi-järv) | >3–8 (Peipsi), >6–13 (Lämmi-järv) | >8–20 (Peipsi), >13–37 (Lämmi-järv) | >20–38 (Peipsi), >37–75 (Lämmi-järv) | >38 (Peipsi), >75 (Lämmi-järv) |
| 8 | <5 | 5–15 | >15–25 | >25 | > 25 |
| Surface Area (km2) | Avg. Depth (Deepest) (m) | Length (km) | Width (km) | chl a (mg/m3) | TSM (mg/m3) | acdom (442) (m−1) | Secchi Depth (m) | Base-line | |
|---|---|---|---|---|---|---|---|---|---|
| Jõemõisa | 0.7 | 2.6 (3.2) | 1.8 | 0.7 | 27.3 | 4.3 | 10.1 | 0.8 | 2.05 |
| Kaiu | 1.3 | 2.6 (3) | 1.7 | 1.3 | 21.2 | 5.0 | 14.0 | 0.8 | |
| Verevi | 0.1 | 3.6 (11) | 0.95 | 0.3 | 31.0 | 5.3 | 3.4 | 1.4 | |
| Pangodi | 0.9 | 3.9 (11.1) | 2.1 | 0.7 | 15.2 | 4.2 | 1.3 | 1.7 | |
| Hino | 2.1 | 3.1 (10.4) | 2.9 | 1.2 | 5.3 | 10.7 | 0.7 | - | |
| Kirikumäe | 0.6 | 2.8 (3.5) | 1.0 | 0.95 | 20.7 | 6.0 | 7.7 | 1.2 | |
| Murati | 0.7 | 3.6 (4.3) | 1.8 | 0.7 | 23.8 | 3.7 | 13.3 | 1.0 | |
| Otepää Valgjärv | 0.7 | 3.2 (5.5) | 1.4 | 0.8 | 27.1 | 25.5 | 1.7 | 1.3 | 2.04 |
| Peipsi_11 | 3543.1 | 8 (17.5) | 143.0 | 48.0 | 25.5 | 10.5 | 1.6 | 0.9 | |
| Peipsi_12 | 34.3 | 12.0 | 4.8 | 0.7 | |||||
| Peipsi_38 | 24.8 | 12.5 | 1.9 | 0.8 | |||||
| Võrts-järv_1 | 270.0 | 2.8 (6) | 38.4 | 14.4 | 34.7 | 10.8 | 2.5 | 0.7 | 2.02 |
| Võrts-järv_10 | 34.8 | 10.8 | 2.4 | 0.7 |
| 443 | 490 | 560 | 665 | 705 | 740 | 783 | N | ||
|---|---|---|---|---|---|---|---|---|---|
| R2 | ACOLITE | 0.32 | 0.01 | 0.34 | 0.43 | 0.48 | 0.29 | 0.32 | 11 |
| C2RCC | 0.02 | 0.27 | 0.70 | 0.80 | 0.88 | 0.32 | 0.23 | 13 | |
| POLYMER | 0.07 | 0.00 | 0.12 | 0.47 | 0.67 | 0.04 | 0.06 | 7 | |
| Sen2Cor | 0.57 | 0.02 | 0.40 | 0.39 | 0.61 | 0.00 | 0.00 | 10 | |
| ψ | ACOLITE | 740.6 | 221.6 | 97.7 | 93.5 | 112.3 | 739.2 | 740.6 | 11 |
| C2RCC | 113.8 | 53.2 | 42.6 | 51.2 | 58.0 | 72.9 | 117.0 | 13 | |
| POLYMER | 122.5 | 60.6 | 20.5 | 40.6 | 40.0 | 72.2 | 110.9 | 7 | |
| Sen2Cor | 419.0 | 118.8 | 50.1 | 60.6 | 51.4 | 105.8 | 121.2 | 10 | |
| Δ | ACOLITE | 0.02 | 0.02 | 0.01 | 0.01 | 0.01 | 0.01 | 0.02 | 11 |
| C2RCC | 0.00 | 0.00 | 0.01 | 0.00 | 0.00 | 0.00 | 0.00 | 13 | |
| POLYMER | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 7 | |
| Sen2Cor | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 | 0.00 | 0.00 | 10 | |
| δ | ACOLITE | 7.25 | 2.21 | 0.98 | 0.93 | 1.12 | 7.39 | 7.25 | 11 |
| C2RCC | 0.58 | −0.07 | −0.41 | −0.46 | −0.58 | −0.37 | 0.19 | 13 | |
| POLYMER | 0.92 | 0.32 | −0.10 | −0.31 | −0.32 | 0.00 | 0.83 | 7 | |
| Sen2Cor | 3.92 | 0.81 | −0.06 | −0.06 | −0.11 | 0.03 | 0.20 | 10 | |
| S | ACOLITE | −4.16 | −0.46 | 0.97 | 1.25 | 1.25 | −1.49 | −1.77 | 11 |
| C2RCC | 0.17 | 0.57 | 0.80 | 1.18 | 1.01 | 0.60 | 0.56 | 13 | |
| POLYMER | 0.37 | 0.05 | 0.27 | 1.10 | 1.42 | 0.14 | −0.18 | 7 | |
| Sen2Cor | −3.06 | −0.42 | 1.11 | 1.33 | 1.71 | 0.05 | −0.16 | 10 | |
| I | ACOLITE | 0.04 | 0.02 | 0.01 | 0.01 | 0.01 | 0.02 | 0.02 | 11 |
| C2RCC | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 13 | |
| POLYMER | 0.00 | 0.01 | 0.01 | 0.00 | −0.01 | 0.00 | 0.00 | 7 | |
| Sen2Cor | 0.03 | 0.01 | 0.00 | 0.00 | −0.01 | 0.00 | 0.00 | 10 |
| Investigated Empirical Algorithms | Reference | Investigated Empirical Algorithms | Reference |
|---|---|---|---|
| R443/R560 | [65] | R665−1 × R705 | [13] |
| R490/R443 | [9] | R665−1 − R705−1 | [66] |
| R490/R560 | [67] | (R665−1 − R705−1) × R740 | [15,66] |
| log(R443/R560) | (R665−1 − R705−1) × R783 | ||
| log(R490/R560) | (R665−1 − R705−1)/(R740−1 − R705−1) | [15] | |
| ln(R490/R560) | [68] | R705 − ((R665 + R740)/2) | [69] |
| ln(R443/R560) | R705/R665 | [13,66] | |
| (R490 − R665)/(R560 − R665) | [14] | R740 × ((R665−1) − R705−1)) | [39] |
| (R490 − R443)/(R490 + R443) | [9] | R705/(R560 + R665) | [70] |
| (R443−1 − R490−1) × R560 | (R705−1 − R665−1)/(R705−1 + R665−1) | [15] | |
| (R740/R705) − (R740/R665) | [39] | R740/R665 | [66] |
| R665/R560 | [37] | SPP | [71] |
| R665−1 × R783 | [13] | MCI | [41] |
| R665−1 × R740 | FLH | [42] |
| chl a (mg/m3) | TSM (mg/m3) | acdom (442) (m−1) | Secchi Depth (m) | N | R2 | Algorithm | Empirical chl a Algorithm | |
|---|---|---|---|---|---|---|---|---|
| Input S2 MSI L1C data | ||||||||
| Estonian lakes | 15.2−34.8 (26.7) | 3.7–25.5 (9.2) | 1.3–14 (5.2) | 0.7–1.7 (1.0) | 12 | 0.26 | MCI (R783) | y = 1116.3x + 25.8 |
| 0.25 | MCI (R740) | y = 871.4x + 25.2 | ||||||
| 0.25 | SNAP S2 MCI processor | y = 870.8x + 25.3 | ||||||
| Input R from GLaSS dataset | ||||||||
| Peipsi | 2.7–14.3 (7.5) | 1.9–11.7 (6.3) | 1.7–4.1 (2.3) | 0.8–2.65 (1.4) | 23 | 0.44 | R665−1 − R705−1 | y = 0.1x + 9.8 |
| 0.40 | (R665−1 − R705−1) × 740 | y = 65.0x + 10.2 | ||||||
| 0.40 | (R665−1 − R705−1)/(R740−1 − R705−1) | Figure = 43.2x + 10.2 | ||||||
| Võrts-järv | 24.6–45.3 (35.8) | 10.0–18.7 (15.7) | 2.2–4.2 (2.6) | 0.45–0.7 (0.6) | 11 | 0.93 | (R665−1 − R705−1) × R783 | y = 286.1x + 27.7 |
| 0.92 | (R705−1 − R665−1)/(R705−1 + R665−1) | y = −165.0x + 27.9 | ||||||
| 0.92 | (R665−1 − R705−1) × R740 | y = 260.5x + 27.8 | ||||||
| Betuwe | 12.1–150.2 (23.5) | 1.4–28.2 (4.6) | N/A (N/A) | N/A (N/A) | 16 | 0.83 | MCI (R783) | y = 27639.6x + 13.7 |
| 0.77 | R705 − ((R665 + R740)/2) | y = 24385.4x + 7.7 | ||||||
| 0.76 | MCI (R740) | y = 23733.3x + 6.7 | ||||||
| Finnish boreal lakes | 1.6–8.2 (3.2) | 0.7–2.1 (1.9) | 0.8–10.3 (1.4) | 1.3–5.0 (3.5) | 9 | 0.87 | MCI (R783) | y = 20821.5x + 1.7 |
| 0.64 | R705 − ((R665 + R740)/2) | y = 12065.5x + 1.4 | ||||||
| 0.60 | MCI (R740) | y = 10424.5x + 1.5 | ||||||
| Vesijärvi | 1.7–11.0 (4.6) | 1.2–3.4 (2.5) | 0.5–0.9 (0.8) | 2.4–4.6 (2.9) | 7 | 0.97 | R705/R665 | y = 29.4x − 15.8 |
| 0.95 | (R705−1 − R665−1)/(R705−1 + R665−1) | y = −43.8x + 12.6 | ||||||
| 0.94 | (R490 − R665)/(R560 − R665) | y = −23.8x + 11.1 | ||||||
| Garda | 0.2–9.2 (1.3) | 0.2–14.7 (1.4) | 0.0–1.2 (0.1) | 0.8–8.5 (4.5) | 46 | 0.25 | (R490 − R665)/(R560 − R665) | y = −2.7x + 3.9 |
| 0.21 | (R705−1 − R665−1)/(R705−1 + R665−1) | y = −4.1x + 2.5 | ||||||
| 0.20 | R705/R665 | y = 2.2x + 0.1 | ||||||
| Mag-giore | 0.2–3.8 (1.6) | 0.1–2.8 (0.6) | 0.1–0.6 (0.2) | 4.9–10.5 (8.5) | 57 | 0.31 | R490/R443 | y = 6.5x − 7.7 |
| 0.30 | ln(R443/R490) | y = −9.3x − 1.7 | ||||||
| 0.30 | (R490 − R443)/(R490 + R443) | y = 19.1x − 1.8 | ||||||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ansper, A.; Alikas, K. Retrieval of Chlorophyll a from Sentinel-2 MSI Data for the European Union Water Framework Directive Reporting Purposes. Remote Sens. 2019, 11, 64. https://doi.org/10.3390/rs11010064
Ansper A, Alikas K. Retrieval of Chlorophyll a from Sentinel-2 MSI Data for the European Union Water Framework Directive Reporting Purposes. Remote Sensing. 2019; 11(1):64. https://doi.org/10.3390/rs11010064
Chicago/Turabian StyleAnsper, Ave, and Krista Alikas. 2019. "Retrieval of Chlorophyll a from Sentinel-2 MSI Data for the European Union Water Framework Directive Reporting Purposes" Remote Sensing 11, no. 1: 64. https://doi.org/10.3390/rs11010064
APA StyleAnsper, A., & Alikas, K. (2019). Retrieval of Chlorophyll a from Sentinel-2 MSI Data for the European Union Water Framework Directive Reporting Purposes. Remote Sensing, 11(1), 64. https://doi.org/10.3390/rs11010064