Road Information Extraction from High-Resolution Remote Sensing Images Based on Road Reconstruction

Abstract
:1. Introduction
2. Methodology
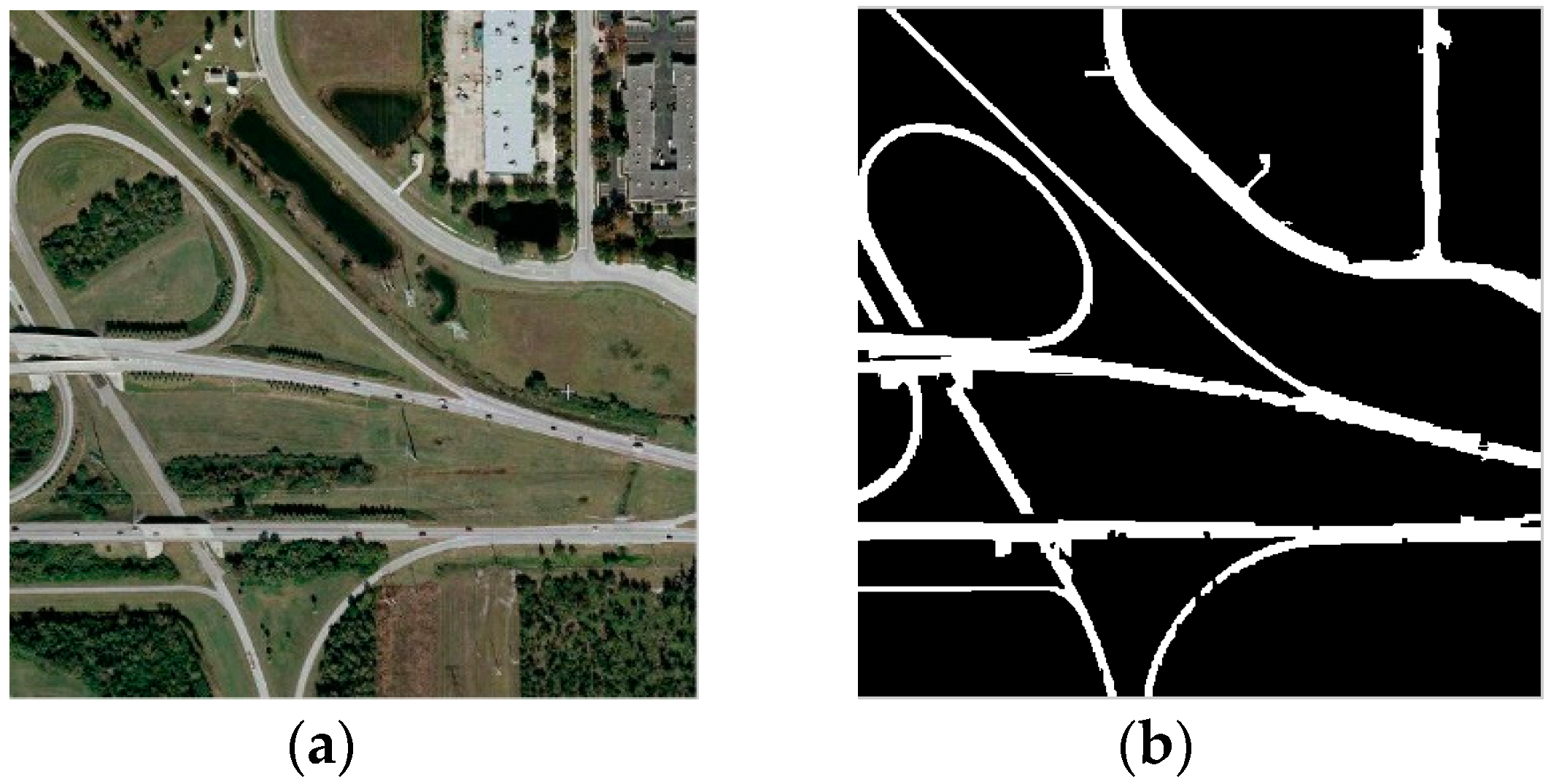
2.1. Multiscale Segmentation and Feature Extraction
2.2. The Extraction of Centerline
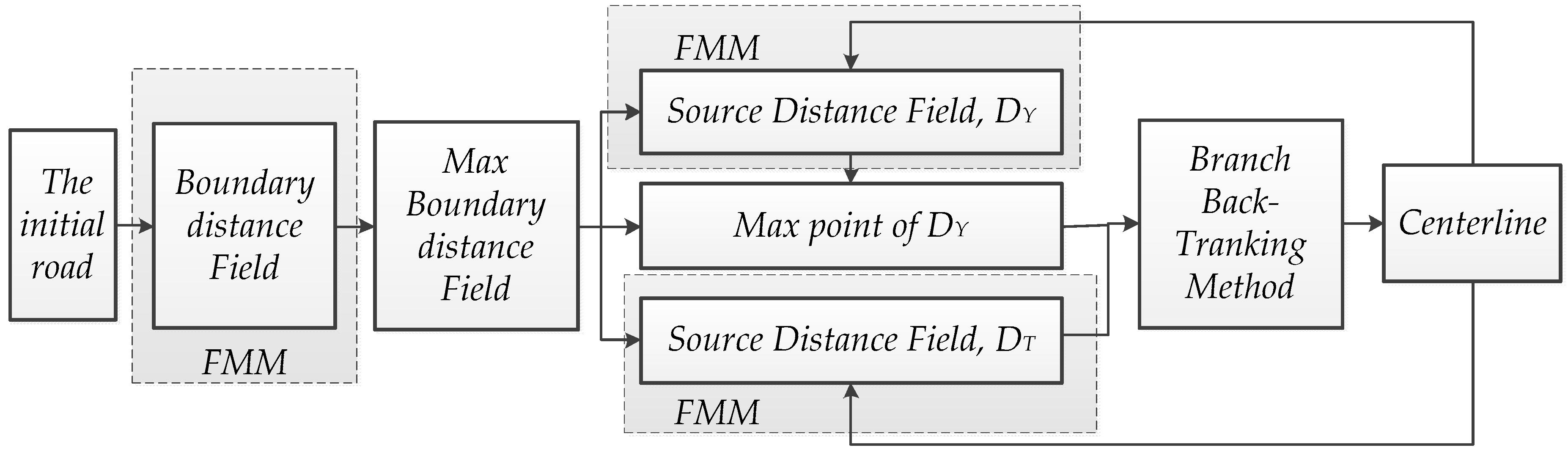
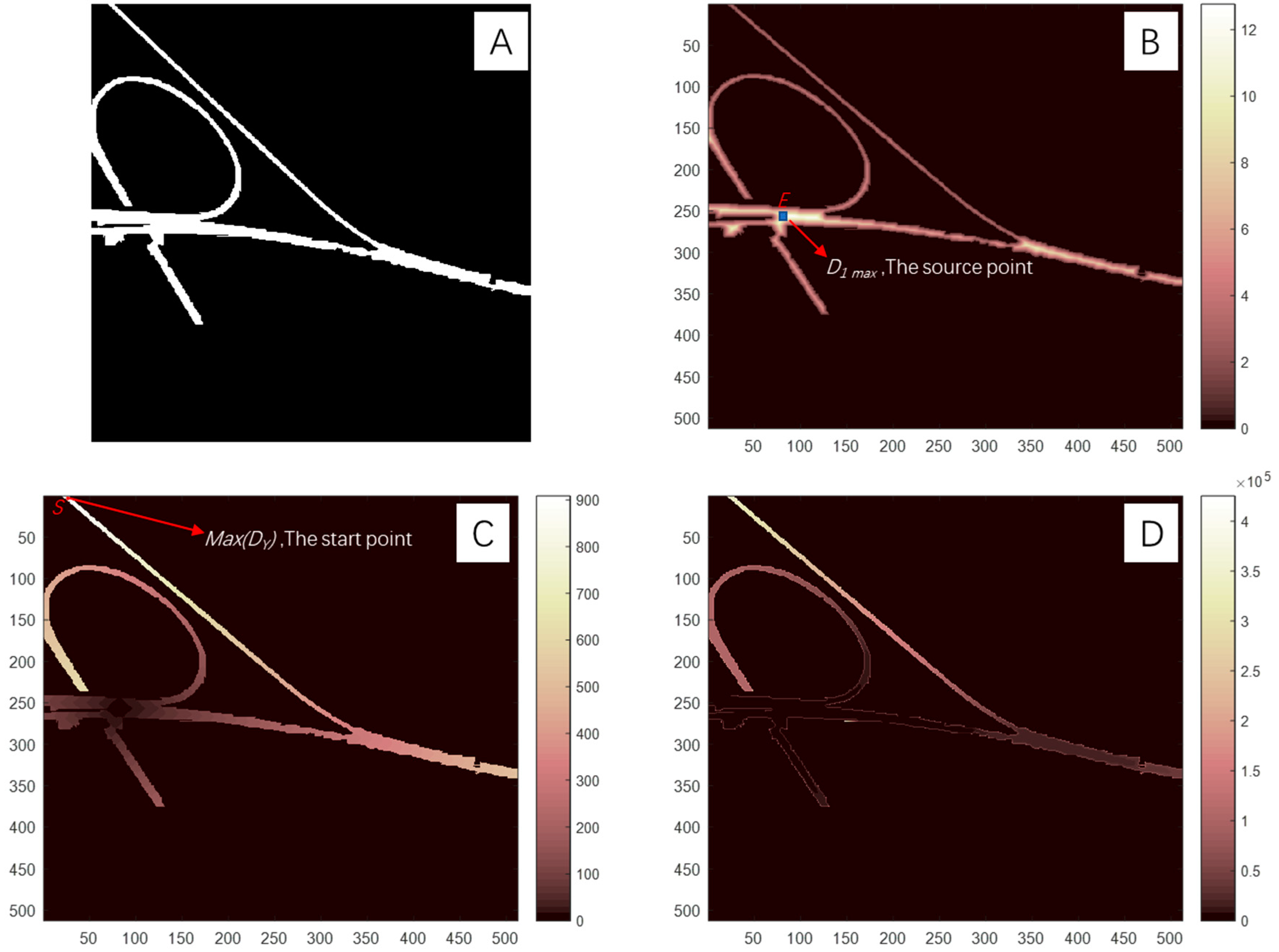
2.2.1. Obtaining Distance Field Using FMM Algorithm
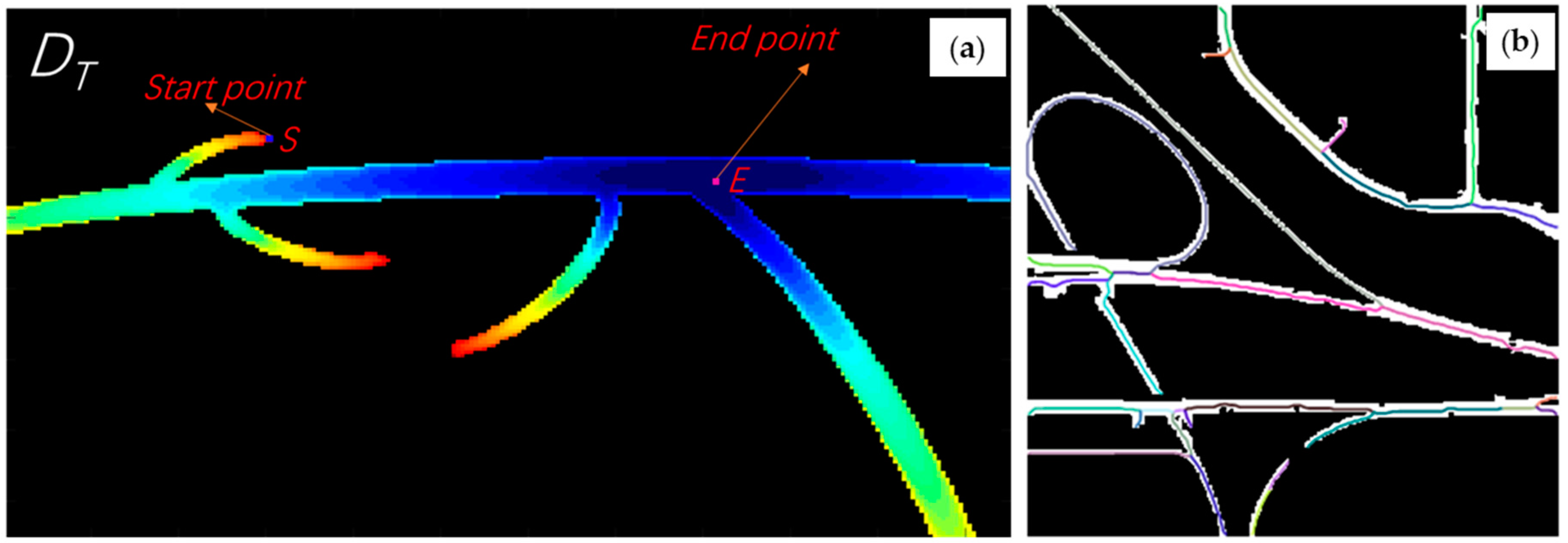
2.2.2. Centerline Extraction Based on Branch Backing-Tracking Method
2.3. Road Width Extraction
2.4. Obtaining the Tensor Field
- (1)
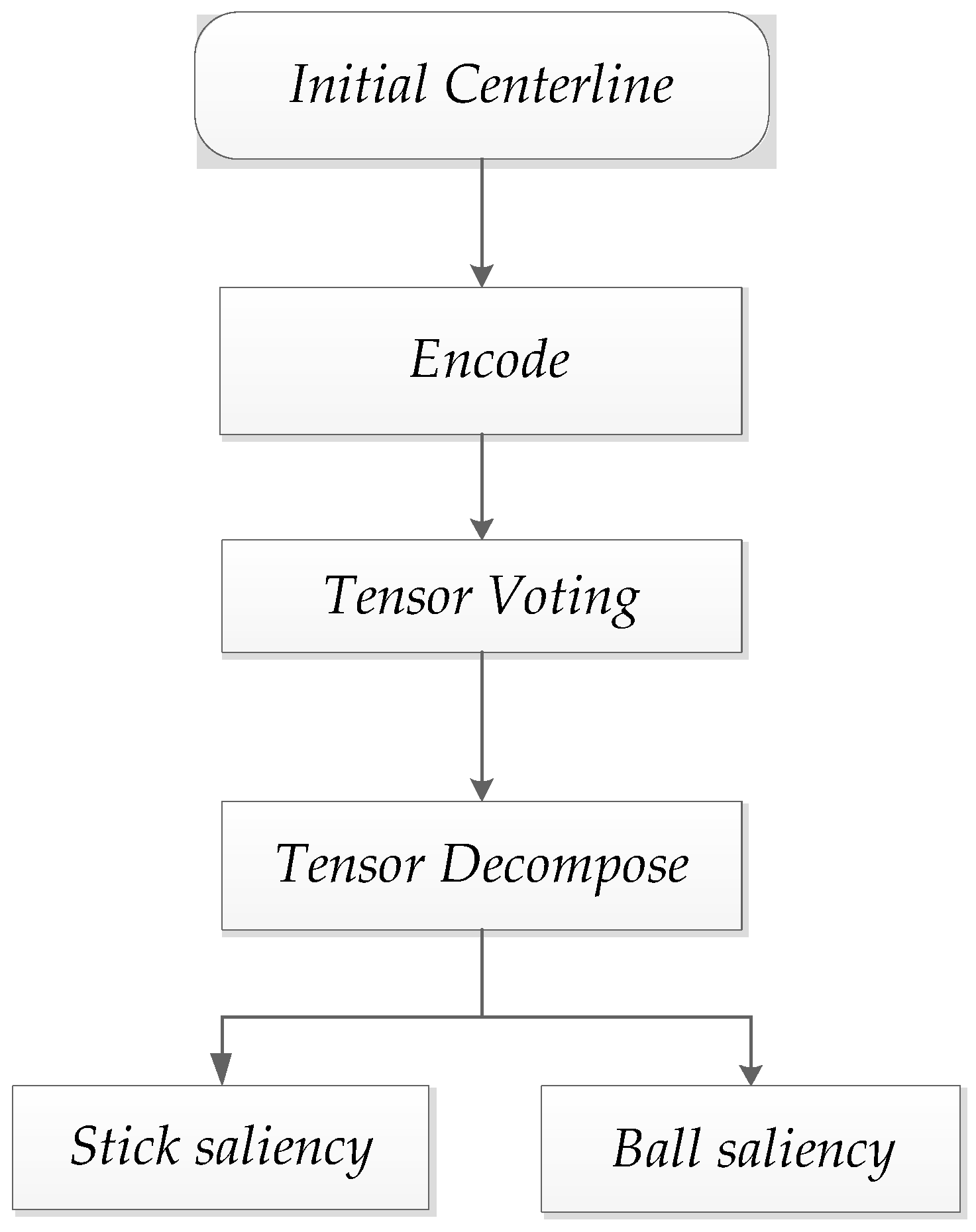
- In the tensor encoding phase, the location information of the initialization centerline C1 is encoded as the initialization tensor T. For the initial centerline of the input (binary image): if the input pixel is a single pixel point, then the eigenvalues are l1 = l2 = 1, ; if the input pixel is a point on the curve and the normal vector of the point is , its eigenvalues are l1 = 1, l2 = 0, . According to the definition of matrix theory, any one second-order semidefinite tensor can be decomposed into two eigenvalues and two eigenvectors. The tensor T can be decomposed as follows:where e1 and e2 are eigenvectors, l1 and l2 are eigenvalues, , is the stick tensor, (l1 − l2) is the saliency of stick tensor; is the ball tensor; and l2 is the saliency of ball tensor.
- (2)
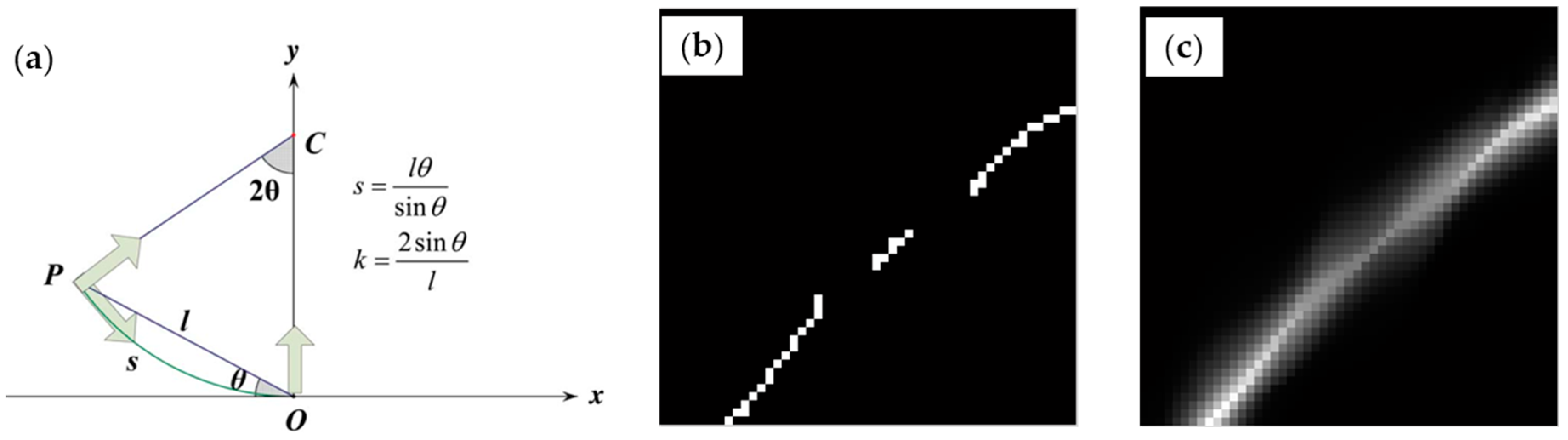
- Tensor voting is carried out on the initial tensor after encoding, and tensors communicate their information with each other in a neighborhood. A tensor vote is first made on the initialization tensor obtained from 1).The tensor field is expressed by the attenuation function DF. As shown in Figure 9a, we assume that O and P are two points in T, where O is the voting point and P is the receiving point, then, the voting intensity DF of P received from O point is as shown in Equation (9).where s is the osculating circle arc length of the voting center point to the voting point; k is the curvature of the osculating circle; is the size of the voting window; and c is a constant. The value of the voting window is determined by the size of the centerline fracture, and, if the fracture is large, then takes a relatively large value; here, it takes a value of 18.25. Where c is the constant associated with σ, the equation is .
- (3)
- Each point in the encoded initial centerline C1 votes to the point neighborhood within its tensor field, and accepts other points to vote for itself, getting a new tensor field TS.
- (4)
- After the voting, each point on the centerline has a new tensor field, and Equation (10) is used to decompose the tensor field TS. After decomposition, we can get the stick tensor saliency map and the ball tensor saliency map . Here, a stick tensor saliency map is used as boundary distance field in the centerline extraction process, and the new boundary distance field is called D3. In consideration of the fact that D3 is decaying without boundary, here, we set the value of the positions in D3 less than 0.3 to 0, and the value of about 0.3 indicates that the tensor field of the point is very small and negligible. The effect of tensor voting is shown in Figure 9c.
2.5. Final Centerline Extraction and Road Reconstruction
3. Results
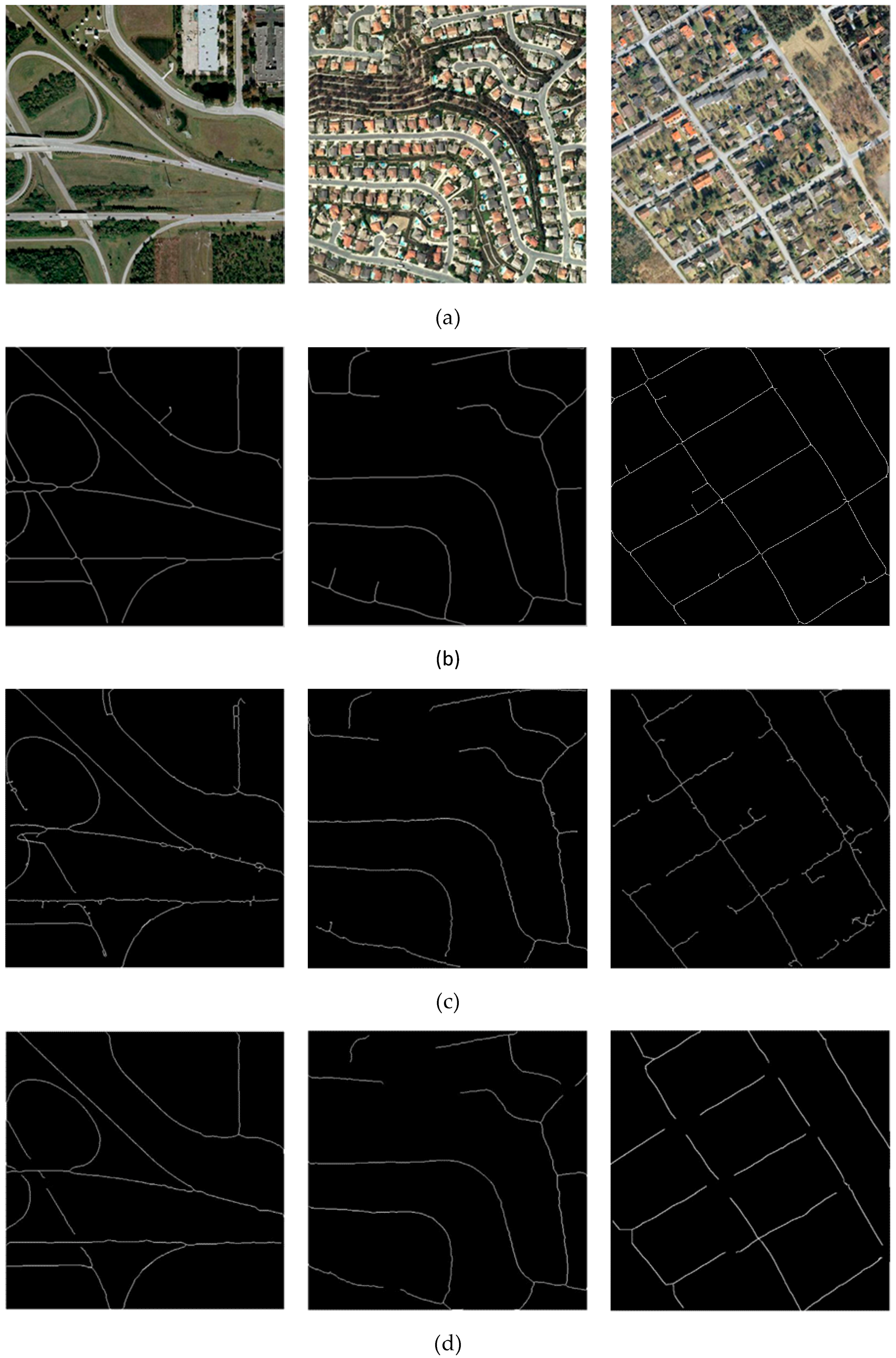
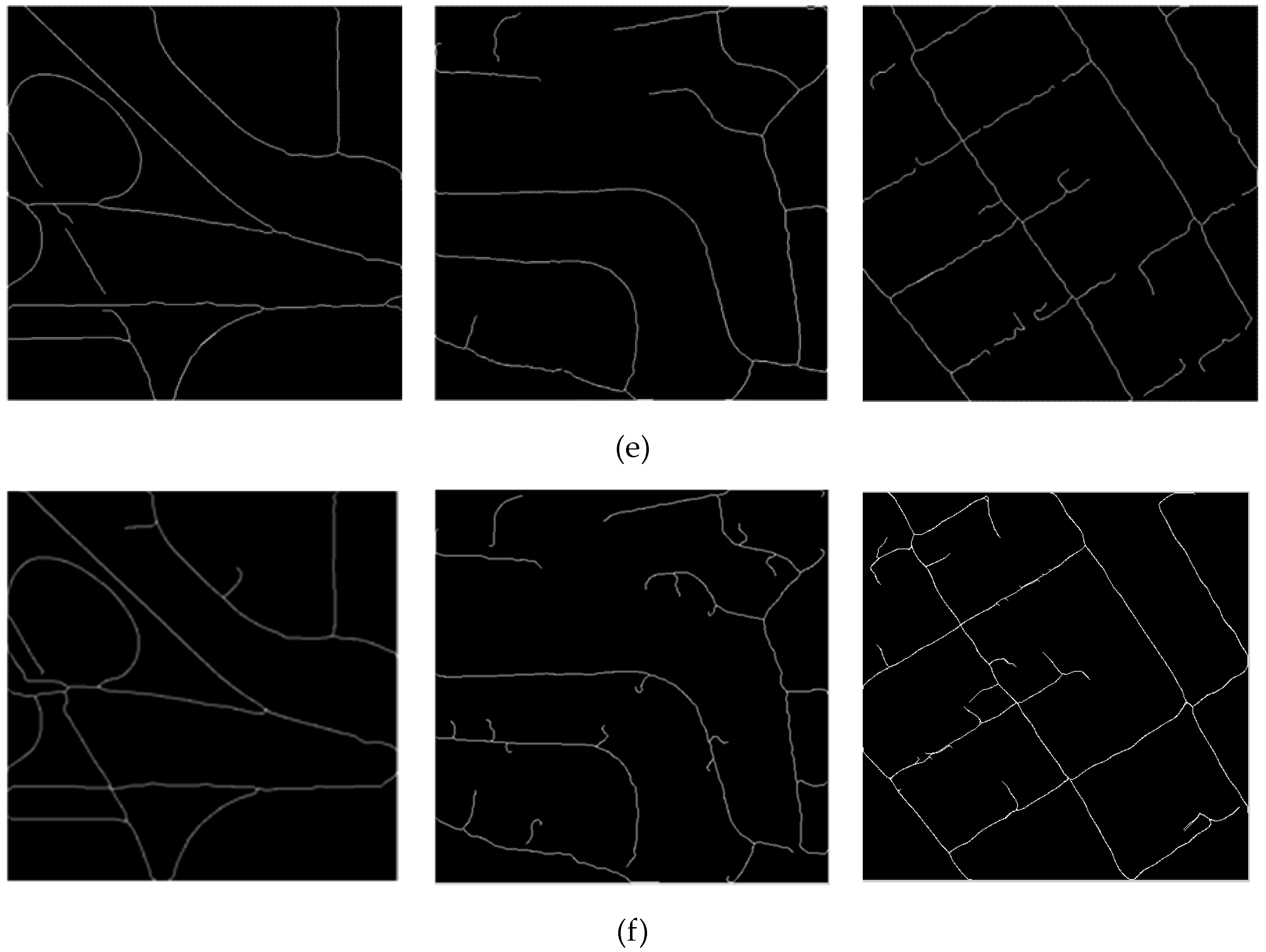
3.1. Experiment
3.1.1. Experiment on Image 1
3.1.2. Experiment on Image 2
3.1.3. Experiment on Image 3
3.2. Analysis of Centerline Extraction Results
3.3. Analysis of Road Width Extraction Results
4. Discussion
4.1. Significance of Road Extraction Based on Remote Sensing Image
- Economic Density: Economic density is the city product [41] divided by the city’s area, its definition is as follows: , Where city square kilometer includes: residential and non-residential buildings, major roads, railways, and sport facilities. Here, the proposed road extraction method can be used to calculate the area of the road within square kilometers effectively.
- Population Density [42]. High-density neighborhoods tend to decrease the costs of public services. So, a reasonable urban planning of high population density is the key to determine urban sustainable development, which includes: police and emergency response, school transport, roads, water and sewage, etc.
- Street Intersection Density. It means number of street intersections per one square kilometer of urban area. In order to calculate this index, we need to: Obtain the street network map of the urban area; Verify the topology: each street segment must be properly connected to other segments; Obtain the start and end point of each segment; Collect events from start and end points; Exclude points with less than 3 events; Count the remaining points and divide by the urban area in km2. For the above information, the method of getting road network is the key technique. Using the proposed road extraction, can efficiently obtain the urban road network information and road details, to provide data support for the street intersection density.
- Street Density. Number of kilometers of urban streets per square kilometer of land which is defined as: . The proposed algorithm can obtain the high precision road centerline, we can obtain the city street length through computing centerline length. In this way, the street density can be obtained effectively.
- Land Allocated to Streets. Land allocated to streets means total area of urban surface allocated to streets. It was defined as: . Here, we propose a road extraction algorithm that can directly carry out Road area statistics and get total surface of urban streets.
- Update the GPS system information timely. Road is one of the most important information of GPS, the use of road extraction from high-resolution remote sensing image can update GPS information timely.
- Conduct traffic situation assessment. According to the distribution of road and vehicle to figure out the congestion of road, not only to provide owners with the best travel program but also greatly improve the efficiency of traffic management.
- Prepare statistics for urban road distribution and land consumption rates, so as to facilitate urban planning. Road and building are the two most important components of urban. Recently, the global population is growing rapidly, taking up more and more resources on the earth, and remote sensing image road extraction can be used in statistics for the distribution of urban roads, and contribute to the rational planning and sustainable development of cities.
- Evaluate the urban population density and urban economic growth based on road development. The intensity of road network is positively correlated with the degree of urban population and economic development. The use of road statistics can establish population density and economic development models, used to assess the comprehensive strength of urban development.
- Implement urban change monitoring. Remote sensing images keep the historical data of the city well, analyze the road information obtained from remote sensing images at different times, and can analyze the changing trends of urban development effectively.
4.2. Comparison of the Methods for Centerline Extraction
4.3. Assessment of Road Width Extraction
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wang, W.; Yang, N.; Zhang, Y.; Wang, F.; Cao, T.; Eklund, P. A review of road extraction from remote sensing images. J. Traffic Transp. Eng. Engl. Ed. 2016, 3, 271–282. [Google Scholar] [CrossRef] [Green Version]
- Steger, C.; Glock, C.; Eckstein, W.; Mayer, H.; Rading, B. Model-based road extraction from images. In Automatic Extraction of Man-Made Objects from Aerial and Space Images; Springer: Berlin/Heidelberg, Germany, 1995; pp. 275–284. [Google Scholar]
- Koutaki, G.; Uchimura, K. Automatic road extraction based on cross detection in suburb. In Proceedings of the Computational Imaging II, Anaheim, CA, USA, 9–10 April 2017; pp. 337–345. [Google Scholar]
- Zhang, C.; Baltsavias, E.P.; Gruen, A. Knowledge-Based Image Analysis for 3D Road Reconstruction; ETH Zurich Institute of Geodesy and Photogrammetry: ETH Hönggerberg, Switzerland, 2001; pp. 3–14. [Google Scholar] [CrossRef]
- Zhang, C.; Murai, S.; Baltsavias, E.P. Road network detection by mathematical morphology. In Proceedings of the ISPRS Workshop 3D Geospatial Data Production: Meeting Application Requirements, Paris, France, 7–9 April 1999. [Google Scholar]
- Baumgartner, A.; Steger, C.T.; Mayer, H.; Eckstein, W. Semantic objects and context for finding roads. In Proceedings of the Integrating Photogrammetric Techniques with Scene Analysis and Machine Vision III, Orlando, FL, USA, 21–23 April 1997; pp. 98–110. [Google Scholar]
- Vosselman, G.; De Knecht, J. Road tracing by profile matching and Kaiman filtering. In Automatic Extraction of Man-Made Objects from Aerial and Space Images; Springer: Berlin/Heidelberg, Germany, 1995; pp. 265–274. [Google Scholar]
- Changqing, Z.; Yun, Y.; Fang, Z.; Qisheng, W. Total rectangle matching approach to road extraction from high resolution remote sensing images. J. Huazhong Univ. Sci. Technol. Nat. Sci. Ed. 2008, 36, 74–77. [Google Scholar] [CrossRef]
- Park, S.-R.; Kim, T. Semi-automatic road extraction algorithm from IKONOS images using template matching. In Proceedings of the 22nd Asian Conference on Remote Sensing, Singapore, 5–9 November 2001; p. 9. [Google Scholar]
- Chaudhuri, D.; Kushwaha, N.; Samal, A. Semi-automated road detection from high resolution satellite images by directional morphological enhancement and segmentation techniques. IEEE J. Sel. Top. Appl. Eearth Obs. Remote Sen. 2012, 5, 1538–1544. [Google Scholar] [CrossRef]
- Nevatia, R.; Babu, K.R. Linear feature extraction and description. Comput. Graph. Image Process. 1980, 13, 257–269. [Google Scholar] [CrossRef]
- Fua, P.; Leclerc, Y.G. Model driven edge detection. Mach. Vis. Appl. 1990, 3, 45–56. [Google Scholar] [CrossRef] [Green Version]
- Neuenschwander, W.M.; Fua, P.; Iverson, L.; Székely, G.; Kübler, O. Ziplock snakes. Int. J. Comput. Vis. 1997, 25, 191–201. [Google Scholar] [CrossRef]
- Marikhu, R.; Dailey, M.N.; Makhanov, S.; Honda, K. A family of quadratic snakes for road extraction. In Proceedings of the Asian Conference on Computer Vision, Tokyo, Japan, 18–22 November 2007; pp. 85–94. [Google Scholar]
- Miao, Z.; Wang, B.; Shi, W.; Zhang, H. A semi-automatic method for road centerline extraction from VHR images. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1856–1860. [Google Scholar] [CrossRef]
- Miao, Z.; Wang, B.; Shi, W.; Wu, H.; Wan, Y. Use of GMM and SCMS for accurate road centerline extraction from the classified image. J. Sens. 2015, 2015, 1–13. [Google Scholar] [CrossRef]
- Liu, R.; Miao, Q.; Huang, B.; Song, J.; Debayle, J. Improved road centerlines extraction in high-resolution remote sensing images using shear transform, directional morphological filtering and enhanced broken lines connection. J. Vis. Commun. Image Represent. 2016, 40, 300–311. [Google Scholar] [CrossRef]
- Van Uitert, R.; Bitter, I. Subvoxel precise skeletons of volumetric data based on fast marching methods. Med. Phys. 2007, 34, 627–638. [Google Scholar] [CrossRef]
- Huang, X.; Zhang, L. Road centreline extraction from high-resolution imagery based on multiscale structural features and support vector machines. Int. J. Remote Sens. 2009, 30, 1977–1987. [Google Scholar] [CrossRef]
- Cheng, G.; Zhu, F.; Xiang, S.; Wang, Y.; Pan, C. Accurate urban road centerline extraction from VHR imagery via multiscale segmentation and tensor voting. Neurocomputing 2016, 205, 407–420. [Google Scholar] [CrossRef] [Green Version]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Bezdek, J.C.; Ehrlich, R.; Full, W. FCM: The fuzzy c-means clustering algorithm. Comput. Geosci. 1984, 10, 191–203. [Google Scholar] [CrossRef]
- Wagstaff, K.; Cardie, C.; Rogers, S.; Schrödl, S. Constrained k-means clustering with background knowledge. In Proceedings of the ICML, Williamstown, MA, USA, 28 June–1 July 2001; pp. 577–584. [Google Scholar]
- Bieniek, A.; Moga, A. An efficient watershed algorithm based on connected components. Pattern Eecognit. 2000, 33, 907–916. [Google Scholar] [CrossRef]
- Gao, L.; Shi, W.; Miao, Z.; Lv, Z. Method based on edge constraint and fast marching for road centerline extraction from very high-resolution remote sensing images. Remote Sens. 2018, 10, 900. [Google Scholar] [CrossRef]
- Osher, S.; Sethian, J.A. Fronts propagating with curvature-dependent speed: algorithms based on Hamilton-Jacobi formulations. J. Comput. Phys. 1988, 79, 12–49. [Google Scholar] [CrossRef]
- Sethian, J.A. A fast marching level set method for monotonically advancing fronts. Proc. Natl. Acad. Sci. USA 1996, 93, 1591–1595. [Google Scholar] [CrossRef] [PubMed]
- Malladi, R.; Sethian, J.A. An O (N log N) algorithm for shape modeling. Proc. Natl. Acad. Sci. USA 1996, 93, 9389–9392. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Zhang, J.; Li, T.; Sun, K. Road extraction and intersection detection based on tensor voting. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 1587–1590. [Google Scholar]
- Shi, W.; Miao, Z.; Debayle, J. An integrated method for urban main-road centerline extraction from optical remotely sensed imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 3359–3372. [Google Scholar] [CrossRef]
- Nock, R.; Nielsen, F. Statistical region merging. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 1452–1458. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, T.-P.; Yeung, S.-K.; Jia, J.; Tang, C.-K.; Medioni, G. A Closed-Form Solution to Tensor Voting: Theory and Applications. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 38, 1482–1495. [Google Scholar]
- Sethian, J.A. Fast marching methods. Siam Rev. 1999, 41, 199–235. [Google Scholar] [CrossRef]
- Hassouna, M.S.; Farag, A.A. Multistencils fast marching methods: A highly accurate solution to the eikonal equation on cartesian domains. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 1563–1574. [Google Scholar] [CrossRef] [PubMed]
- Christodoulidis, A.; Hurtut, T.; Tahar, H.B.; Cheriet, F. A multi-scale tensor voting approach for small retinal vessel segmentation in high resolution fundus images. Comput. Med. Imaging Graph. 2016, 52, 28–43. [Google Scholar] [CrossRef] [PubMed]
- Wiedemann, C.; Heipke, C.; Mayer, H.; Jamet, O. Empirical evaluation of automatically extracted road axes. In Empirical Evaluation Techniques in Computer Vision; Wiley-IEEE Computer Society Press: Washington, DC, USA, 1998; pp. 172–187. [Google Scholar]
- Marans, R.W. Quality of urban life & environmental sustainability studies: Future linkage opportunities. Habitat Int. 2015, 45, 47–52. [Google Scholar]
- Yigitcanlar, T.; Dur, F.; Dizdaroglu, D. Towards prosperous sustainable cities: A multiscalar urban sustainability assessment approach. Habitat Int. 2015, 45, 36–46. [Google Scholar] [CrossRef] [Green Version]
- Arbab, P. City Prosperity Initiative Index: Using AHP Method to Recalculate the Weights of Dimensions and Sub-Dimensions in Reference to Tehran Metropolis. Eur. J. Sustain. Dev. 2017, 6, 289–301. [Google Scholar] [CrossRef]
- MEASUREMENT OF CITY PROSPERITY: Methodology and Metadata. Available online: http://cpi.unhabitat.org/sites/default/files/resources/CPI%20METADATA.2016.pdf (accessed on 13 December 2018).
- Ciccone, A.; Hall, R.E. Productivity and the density of economic activity. Natl. Bureau Econ. Res. 1993, 86, 54–70. [Google Scholar] [CrossRef]
- Habitat, U. A New Strategy of Sustainable Neighbourhood Planning: Five Principles. United Nations Human Settlements Programme: Nairobi, Kenya, 2014. Available online: https://unhabitat.org/a-new-strategy-of-sustainable-neighbourhood-planning-five-principles/ (accessed on 13 December 2018).




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment 1 | Experiment 2 | Experiment 3 | ||||||
|---|---|---|---|---|---|---|---|---|
| TP | FP | FN | TP | FP | FN | TP | FP | FN |
| 3354 | 30 | 22 | 2868 | 175 | 17 | 2975 | 290 | 154 |
| Experiment 1 | Experiment 2 | Experiment 3 | |
|---|---|---|---|
| Com (%) | 99.11 | 94.2 | 91.11 |
| Cor (%) | 99.35 | 98.05 | 95.08 |
| Q (%) | 98.47 | 92.51 | 87.01 |
| Samples | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| The statistics of road width (pixels) | ||||||||||
| Reference 1 | 15.32 | 5.83 | 11.28 | 12.58 | 13.70 | 2.93 | 10.90 | 7.85 | 7.55 | 4.80 |
| Reference 2 | 15.65 | 4.77 | 10.53 | 11.62 | 13.77 | 3.95 | 9.61 | 8.71 | 6.67 | 5.80 |
| Reference 3 | 15.43 | 4.70 | 10.97 | 12.72 | 13.54 | 3.99 | 9.33 | 7.86 | 6.63 | 6.98 |
| Reference width | 15.47 | 5.10 | 10.93 | 12.31 | 13.67 | 3.62 | 9.94 | 8.14 | 6.95 | 5.86 |
| Extraction width | 14.81 | 5.69 | 10.86 | 11.18 | 13.69 | 4.14 | 9.98 | 8.37 | 6.85 | 5.88 |
| The accuracy of road width (%) | ||||||||||
| Absolute error | 4.46 | 10.37 | 0.65 | 10.10 | 0.15 | 12.56 | 0.40 | 2.75 | 1.46 | 0.34 |
| Absolute accuracy | 95.54 | 89.63 | 99.35 | 89.9 | 99.85 | 87.44 | 99.6 | 97.25 | 98.54 | 99.66 |
| Method | Experiment 1 | Experiment 2 | Experiment 3 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Com (%) | Cor (%) | Q (%) | Com (%) | Cor (%) | Q (%) | Com (%) | Cor (%) | Q (%) | |
| Chaudhuri | 88.7 | 70.5 | 64.6 | 91.6 | 63.0 | 66.2 | 61.7 | 62.4 | 31.0 |
| Shi | 90.4 | 72.8 | 67.6 | 88.3 | 79.8 | 72.2 | 55.4 | 68.3 | 44.1 |
| Ruyi Liu | 89.4 | 73.1 | 67.3 | 92.1 | 76.2 | 71.6 | 62.3 | 64.5 | 46.4 |
| Our method | 99.11 | 99.35 | 98.47 | 94.2 | 98.05 | 92.51 | 91.11 | 95.08 | 87.01 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, T.; Sun, C.; Fu, H. Road Information Extraction from High-Resolution Remote Sensing Images Based on Road Reconstruction. Remote Sens. 2019, 11, 79. https://doi.org/10.3390/rs11010079
Zhou T, Sun C, Fu H. Road Information Extraction from High-Resolution Remote Sensing Images Based on Road Reconstruction. Remote Sensing. 2019; 11(1):79. https://doi.org/10.3390/rs11010079
Chicago/Turabian StyleZhou, Tingting, Chenglin Sun, and Haoyang Fu. 2019. "Road Information Extraction from High-Resolution Remote Sensing Images Based on Road Reconstruction" Remote Sensing 11, no. 1: 79. https://doi.org/10.3390/rs11010079
APA StyleZhou, T., Sun, C., & Fu, H. (2019). Road Information Extraction from High-Resolution Remote Sensing Images Based on Road Reconstruction. Remote Sensing, 11(1), 79. https://doi.org/10.3390/rs11010079