Comparison of Computational Intelligence Methods Based on Fuzzy Sets and Game Theory in the Synthesis of Safe Ship Control Based on Information from a Radar ARPA System



Abstract
:1. Introduction
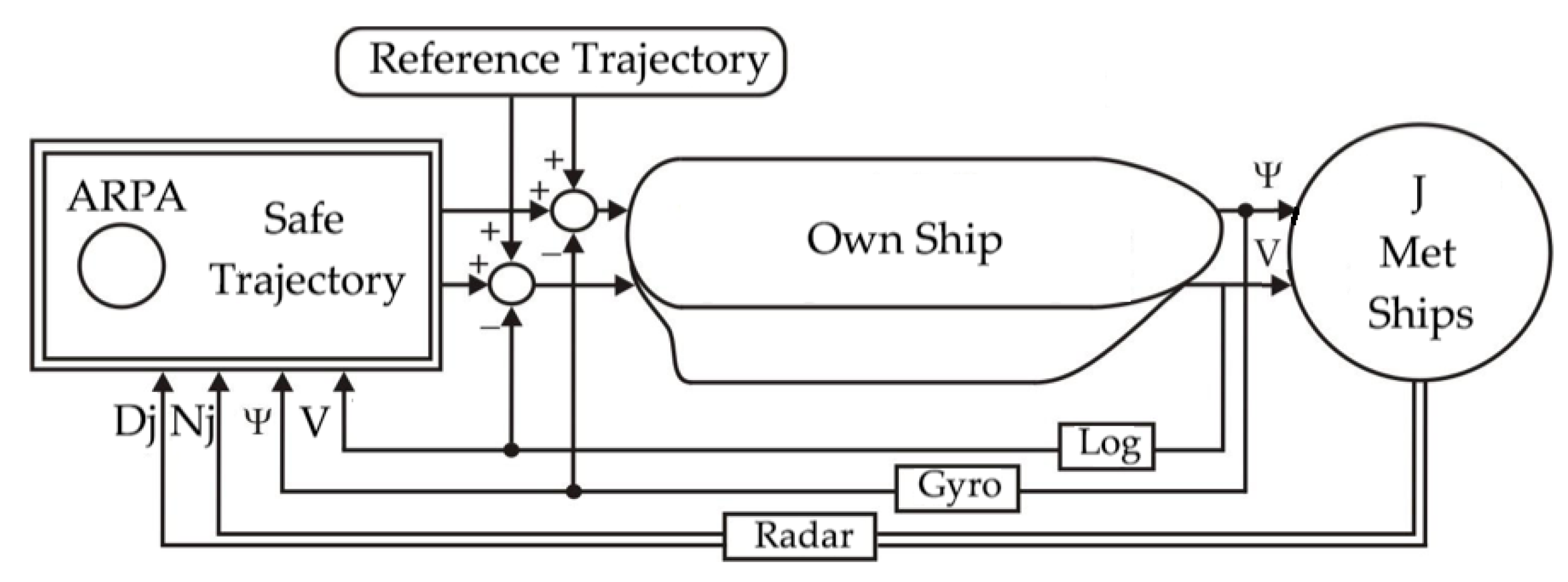
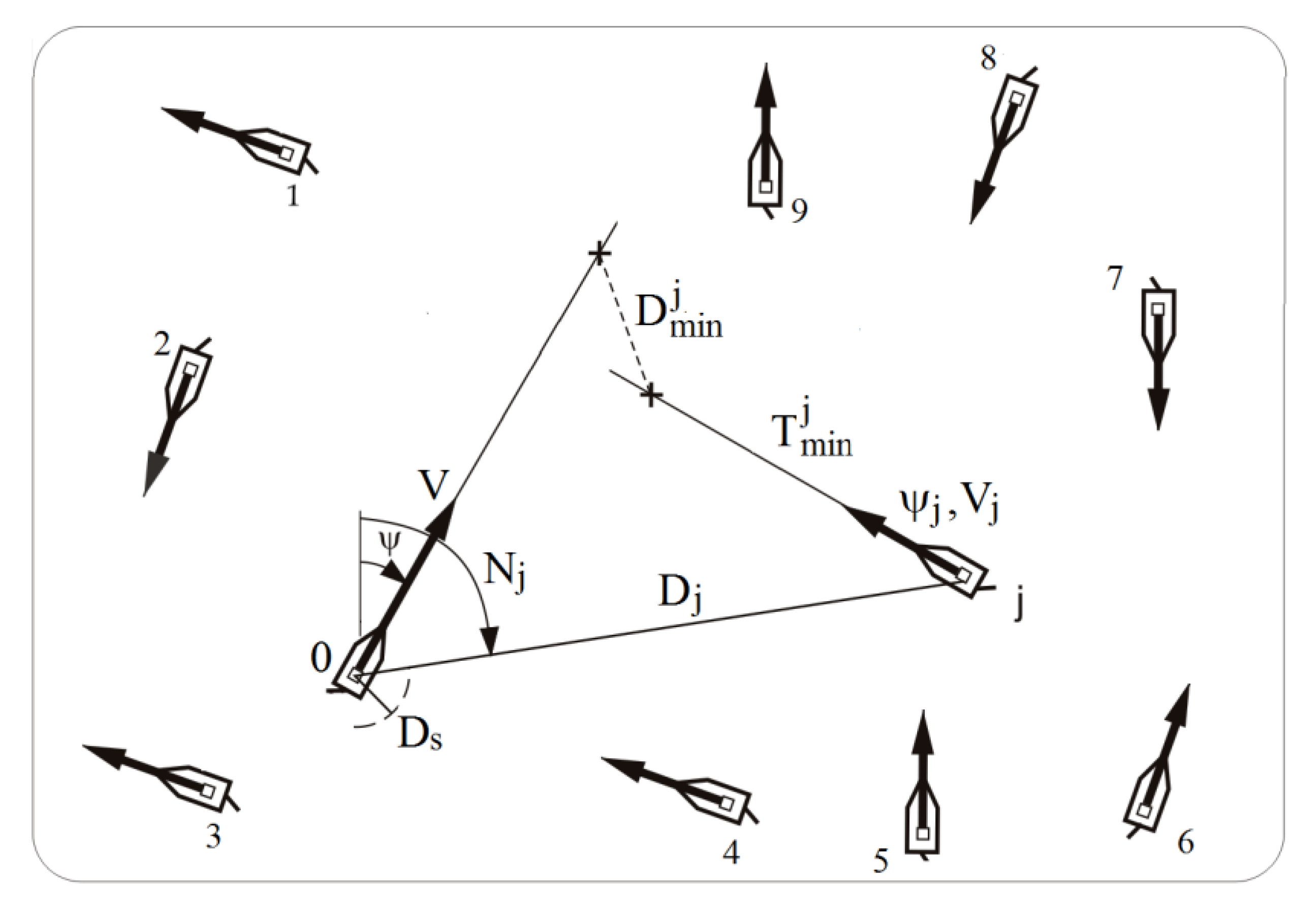
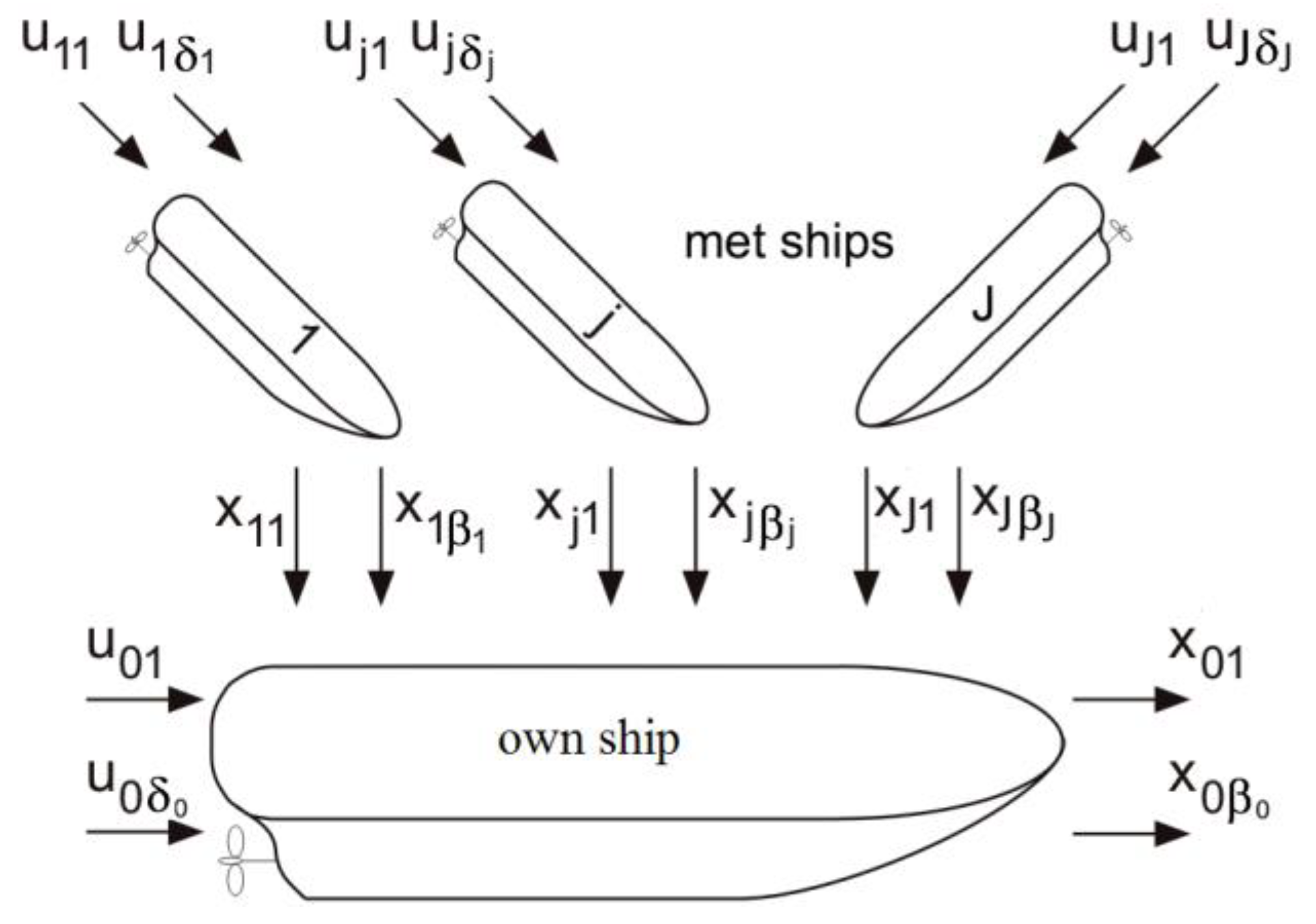
2. Kinematic Model of the Ship
- speed Vj,
- course ψj,
- distance of the closest point of approach DCPAj = Djmin,
- time to the closest point of approach TCPAj = Tjmin.
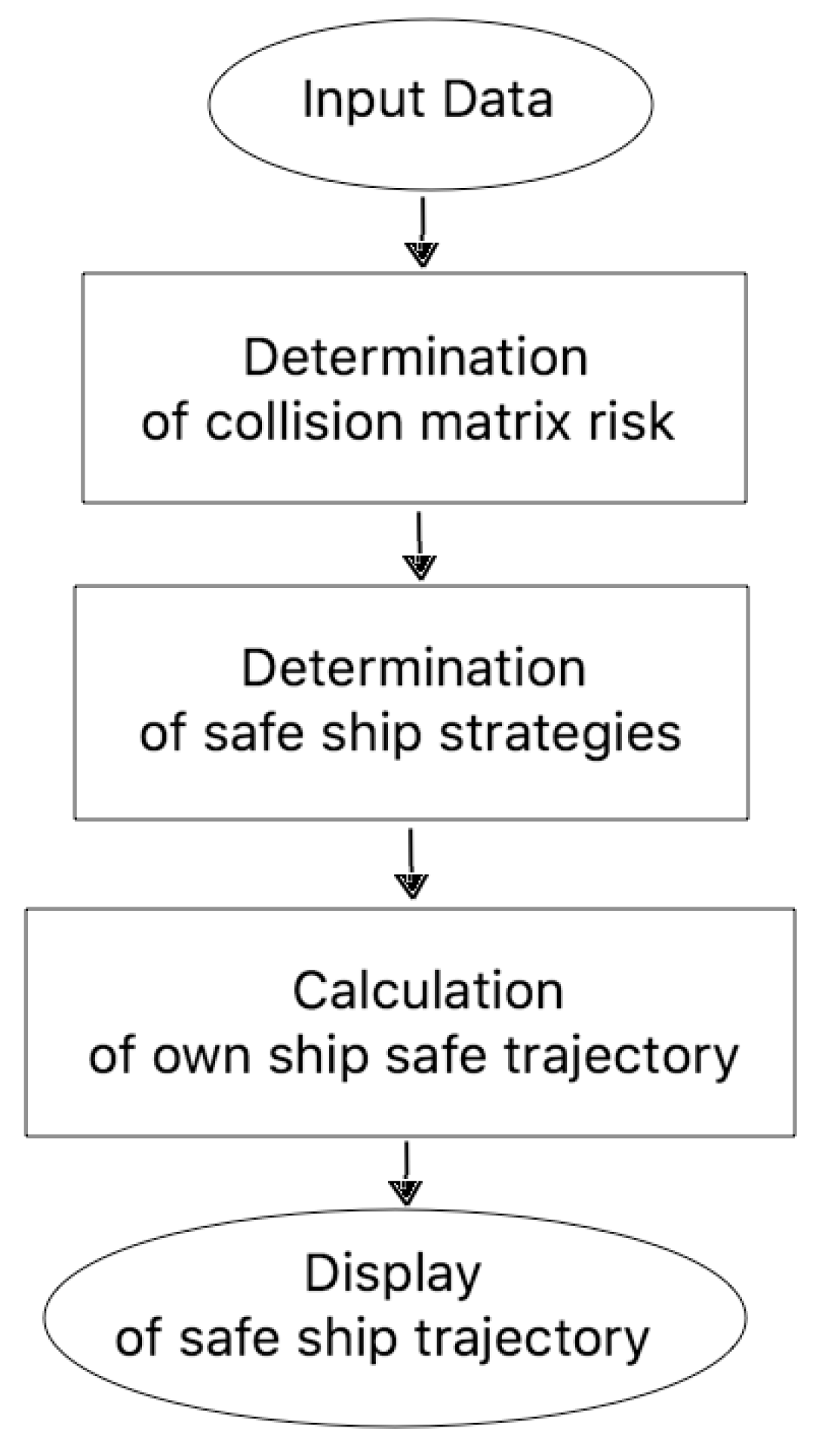
3. Fuzzy Control Model of the Process
3.1. Membership Function of Fuzzy Goal
3.2. Membership Function of Fuzzy Constraints
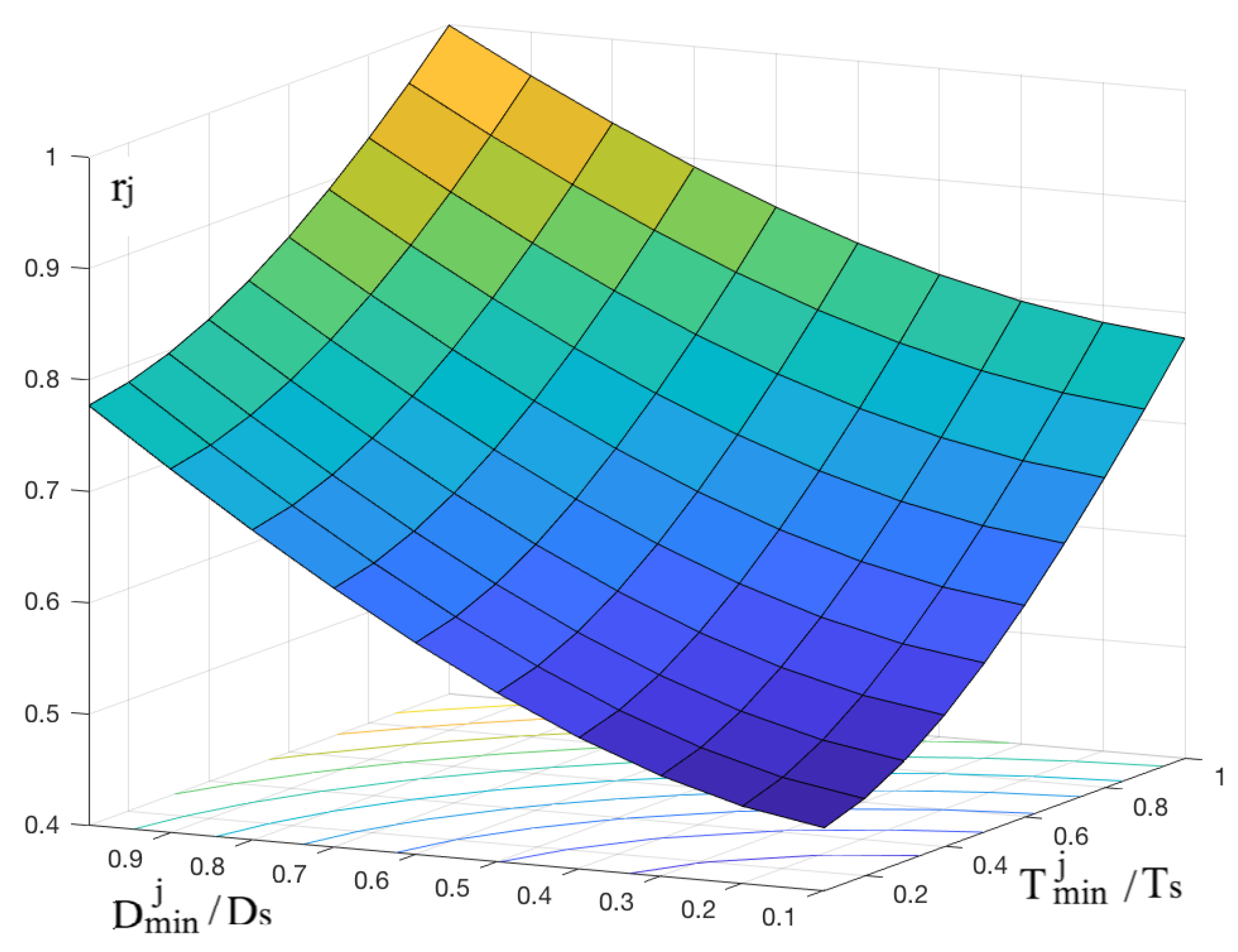
3.3. Membership Function of Fuzzy Collision Risk
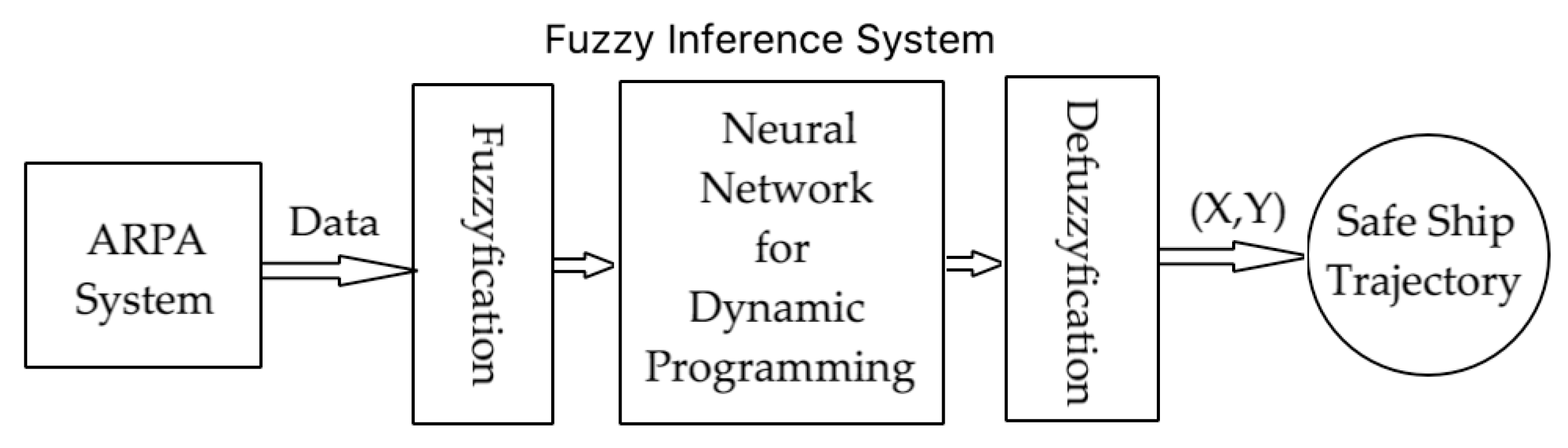
3.4. Fuzzy Neural Anticollision (FNAC) Algorithm
3.4.1. Neural Network
Maximum-Type Neuron
Minimum-Type Neuron
3.4.2. Structure of Neural Networks in Relation to Multistage Control
- Mik—max neuron at stage k,
- mik—min neuron at stage k.
3.4.3. Generating Interconnections between Max and Min Neurons at the Same Layer
3.4.4. Generating Interconnections between Max Neurons and Min Neurons at the Given Layer
4. Game Control Model of the Process
4.1. Base-Differential Game Model
4.2. Approximate Matrix Game Model
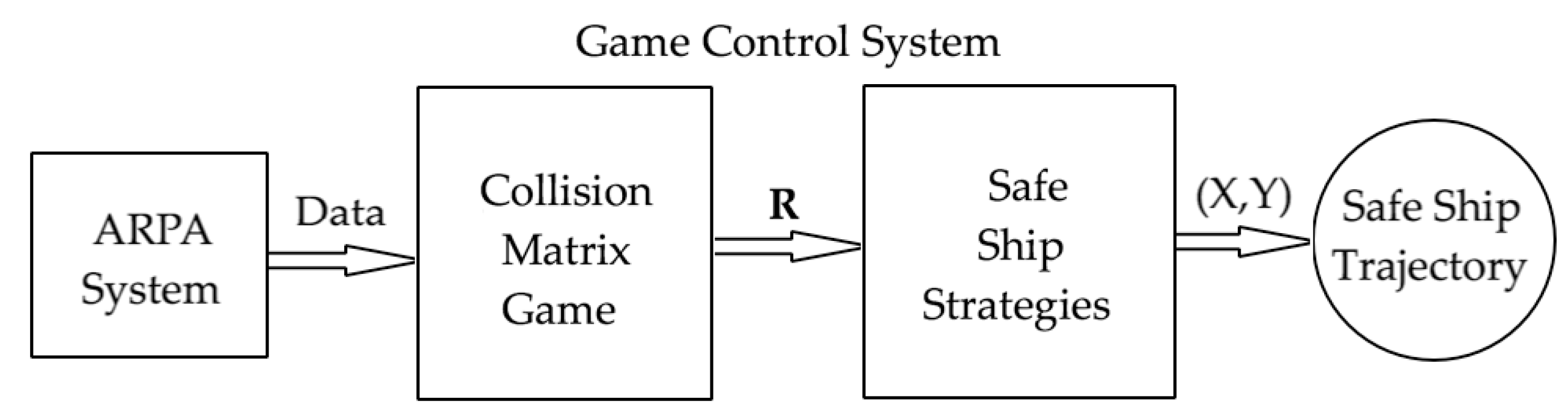
4.3. Matrix Game Anticollision (MGAC) Algorithm
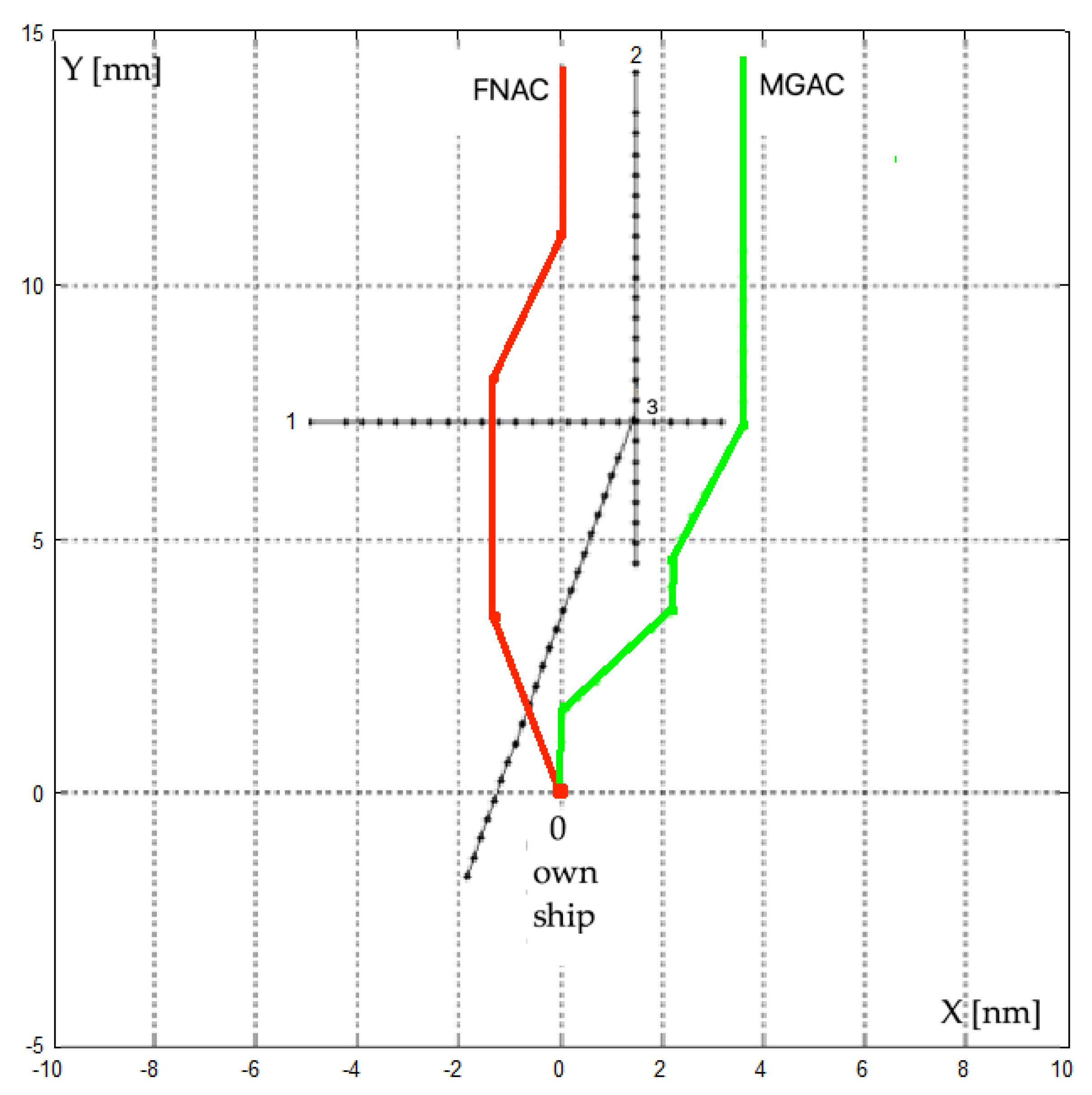
5. Research Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Ap | axonic activation |
| C | fuzzy-set goal |
| D | fuzzy-set decision |
| Ds | safe distance of approach |
| Dj | distance between own-ship and the j-th met ship |
| DCPA | distance to closest point of approach |
| G | fuzzy-set contraints |
| P | probability distribution |
| R | collision-risk matrix |
| rj | value of the collision-risk |
| ut | controls |
| TCPA | time to closest point of approach |
| Ts | safe time of approach |
| U | control-set |
| uk(t) | postsynaptic activation at stage t |
| V | ship speed |
| Vopt | optimal ship speed |
| W | set of final states |
| Xt+1, Xt | ship position co-ordinates |
| X | set of real ship position co-ordinates |
| αt | axonic threshold at stage t |
| μR | membership function of fuzzy-set collision-risk |
| μRsafe | value of μR at which the process is assumed safe |
| λc, λd, λrd, λrt | navigator’s subjective parameters |
| ψ | ship course |
| ψopt | optimal ship course |
| ∧ | minimum operator |
References
- Bist, D.S. Safety and Security at Sea; Butterworth Heinemann: Oxford, UK; New Delhi, India, 2000; ISBN 0-75064-774-4. [Google Scholar]
- Kazimierski, W.; Stateczny, A. Fusion of Data from AIS and Tracking Radar for the Needs of ECDIS. In Proceedings of the Signal Processing Symposium, Jachranka, Poland, 5–7 June 2013. [Google Scholar]
- Borkowski, P. Inference engine in an intelligent ship course-keeping system. Comput. Intell. Neurosci. 2017, 2017, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Tomera, M. Nonlinear observers design for multivariable ship motion control. Pol. Marit. Res. 2012, 19, 50–56. [Google Scholar] [CrossRef]
- Lebkowski, A. Design of an autonomous transport system for coastal areas. TransNav Int. J. Mar. Navig. Saf. Sea 2018, 12, 117–124. [Google Scholar] [CrossRef]
- Kazimierski, W.; Lubczonek, J. Verification of Marine Multiple Model Neural Tracking Filter for the Needs of Shore Radar Stations. In Proceedings of the 13 International Radar Symposium, Warsaw, Poland, 23–25 May 2012; pp. 534–539. [Google Scholar]
- Bellman, R.E.; Zadeh, L.A. Decision making in a fuzzy environment. Manag. Sci. 1970, 17, 12–19. [Google Scholar] [CrossRef]
- Isaacs, R. Differential Games; John Wiley and Sons: New York, NY, USA; London, UK, 1965; ISBN 0-48640-682-2. [Google Scholar]
- Szlapczynski, R.; Szlapczynska, J. An analysis of domain-based ship collision risk parameters. Ocean Eng. 2016, 126, 47–56. [Google Scholar] [CrossRef]
- Lisowski, J. Game control methods in avoidance of ships collision. Pol. Marit. Res. 2012, 19, 3–10. [Google Scholar] [CrossRef]
- Mohamed-Seghir, M. The branch-and-bound method, genetic algorithm, and dynamic programming to determine a safe ship trajectory in fuzzy, knowledge-based and intelligent information and engineering systems. Procedia Comput. Sci. 2014, 35, 348–357. [Google Scholar]
- Modarres, M. Risk Analysis in Engineering; Taylor and Francis Group: Boca Raton, FL, USA, 2006; ISBN 1-57444-794-7. [Google Scholar]
- Francelin, R.; Kacprzyk, J.; Gomide, F. Neural network based algorithm for dynamic system optimization. Asian J. Contr. 2001, 3, 131–142. [Google Scholar] [CrossRef]
- Lyu, H.; Yin, Y. Fast path planning for autonomous ships in restricted waters. Appl. Sci. 2018, 12, 2592. [Google Scholar] [CrossRef]
- Deng, W.; Gan, L.; Zhou, C.; Zheng, Y.; Liu, M.; Zhang, L. Study on Path Planning of Ship Collision Avoidance in Restricted Water base on AFS Algorithm. In Proceedings of the 27th International Ocean and Polar Engineering Conference, San Francisco, CA, USA, 25–30 June 2017; pp. 1–7. [Google Scholar]
- Gia, H.D.; Nam-Kyun, I. Study on the construction of stage discrimination model and consecutive waypoints generation method for ship’s automatic avoiding action. Int. J. Fuzzy Log. Intell. Syst. 2017, 17, 294–306. [Google Scholar]
- Lyu, H.; Yin, Y. COLREGS-constrained real-time path planning for autonomous ships using modified artificial potential fields. J. Navig. 2018, 1–21. [Google Scholar] [CrossRef]
- Lazarowska, A. A new deterministic approach in a decision support system for ship’s trajectory planning. Expert Syst. Appl. 2017, 71, 469–478. [Google Scholar] [CrossRef]
- Rocha, A.F. Neural Nets—A Theory of Brain an Machines; Springer: Berlin, Germany; New York, NY, USA, 1992; ISBN 0-8493-2643-5. [Google Scholar]
- Kacprzyk, J.; Romeo, R.A.; Gomide, F.A.C. Involving objective and subjective aspects in multistage decision making and control under fuzziness: dynamic programming and neural network. Int. J. Intell. Syst. 1999, 14, 79–104. [Google Scholar] [CrossRef]
- Pedrycz, W.; Gomide, E. Fuzzy Systems Engineering Toward Human Centric Computing; Wiley: Hoboken, NJ, USA, 2007; ISBN 978-0-471-78857-7. [Google Scholar]
- Osborne, M.J. An Introduction to Game Theory; Oxford University Press: New York, NY, USA, 2004; ISBN 978-0-19-512895-6. [Google Scholar]
- Lisowski, J. Optimization-supported decision-making in the marine game environment. Solid State Phenom. 2014, 210, 215–222. [Google Scholar] [CrossRef]
- Basar, T.; Olsder, G.J. Dynamic Non-Cooperative Game Theory; SIAM: Philadelphia, PA, USA, 2013; ISBN 978-0-89871-429-6. [Google Scholar]
- Nisan, N.; Roughgarden, T.; Tardos, E.; Vazirani, V.V. Algorithmic Game Theory; Cambridge University Press: New York, NY, USA, 2007; ISBN 978-0-521-87282-9. [Google Scholar]
- Millington, I.; Funge, J. Artificial Intelligence for Games; Elsevier: Amsterdam, The Netherlands; Tokyo, Japan, 2009; ISBN 978-0-12-374731-0. [Google Scholar]
- Engwerda, J.C. LQ Dynamic Optimization and Differential Games; John Wiley and Sons: West Sussex, UK, 2005; ISBN 978-0-470-01524-7. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bearing Nj (°) | Distance Dj (nm) | Speed Vj (kn) | Course ψj (°) | |
|---|---|---|---|---|
| Own-ship | - | - | 20 | 0 |
| Ship 1 | 326 | 8.8 | 13.5 | 90 |
| Ship 2 | 6 | 14.3 | 16.2 | 180 |
| Ship 3 | 11 | 7.5 | 16.0 | 200 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lisowski, J.; Mohamed-Seghir, M. Comparison of Computational Intelligence Methods Based on Fuzzy Sets and Game Theory in the Synthesis of Safe Ship Control Based on Information from a Radar ARPA System. Remote Sens. 2019, 11, 82. https://doi.org/10.3390/rs11010082
Lisowski J, Mohamed-Seghir M. Comparison of Computational Intelligence Methods Based on Fuzzy Sets and Game Theory in the Synthesis of Safe Ship Control Based on Information from a Radar ARPA System. Remote Sensing. 2019; 11(1):82. https://doi.org/10.3390/rs11010082
Chicago/Turabian StyleLisowski, Józef, and Mostefa Mohamed-Seghir. 2019. "Comparison of Computational Intelligence Methods Based on Fuzzy Sets and Game Theory in the Synthesis of Safe Ship Control Based on Information from a Radar ARPA System" Remote Sensing 11, no. 1: 82. https://doi.org/10.3390/rs11010082
APA StyleLisowski, J., & Mohamed-Seghir, M. (2019). Comparison of Computational Intelligence Methods Based on Fuzzy Sets and Game Theory in the Synthesis of Safe Ship Control Based on Information from a Radar ARPA System. Remote Sensing, 11(1), 82. https://doi.org/10.3390/rs11010082