Evaluation of Ground Surface Models Derived from Unmanned Aerial Systems with Digital Aerial Photogrammetry in a Disturbed Conifer Forest



Abstract
:
1. Introduction
2. Materials and Methods
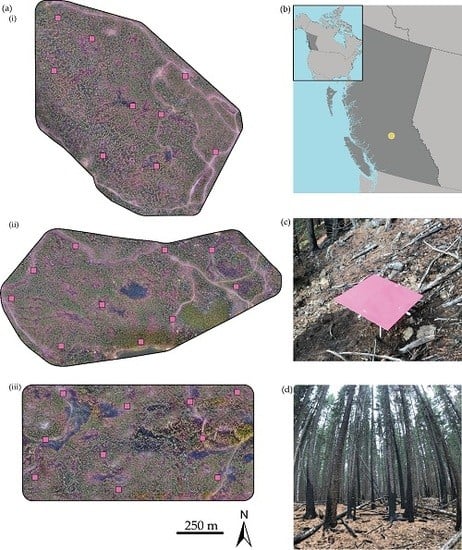
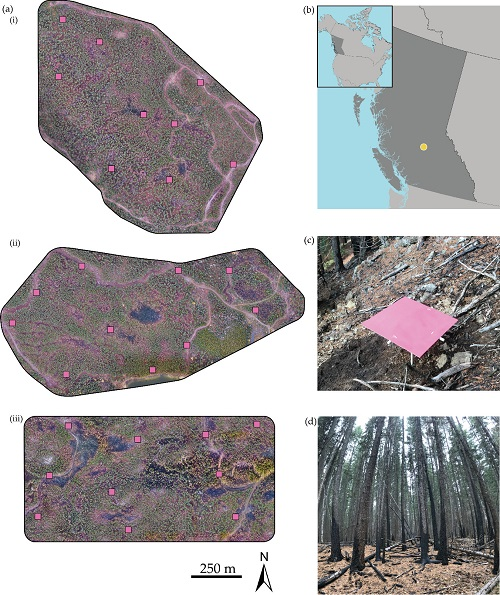
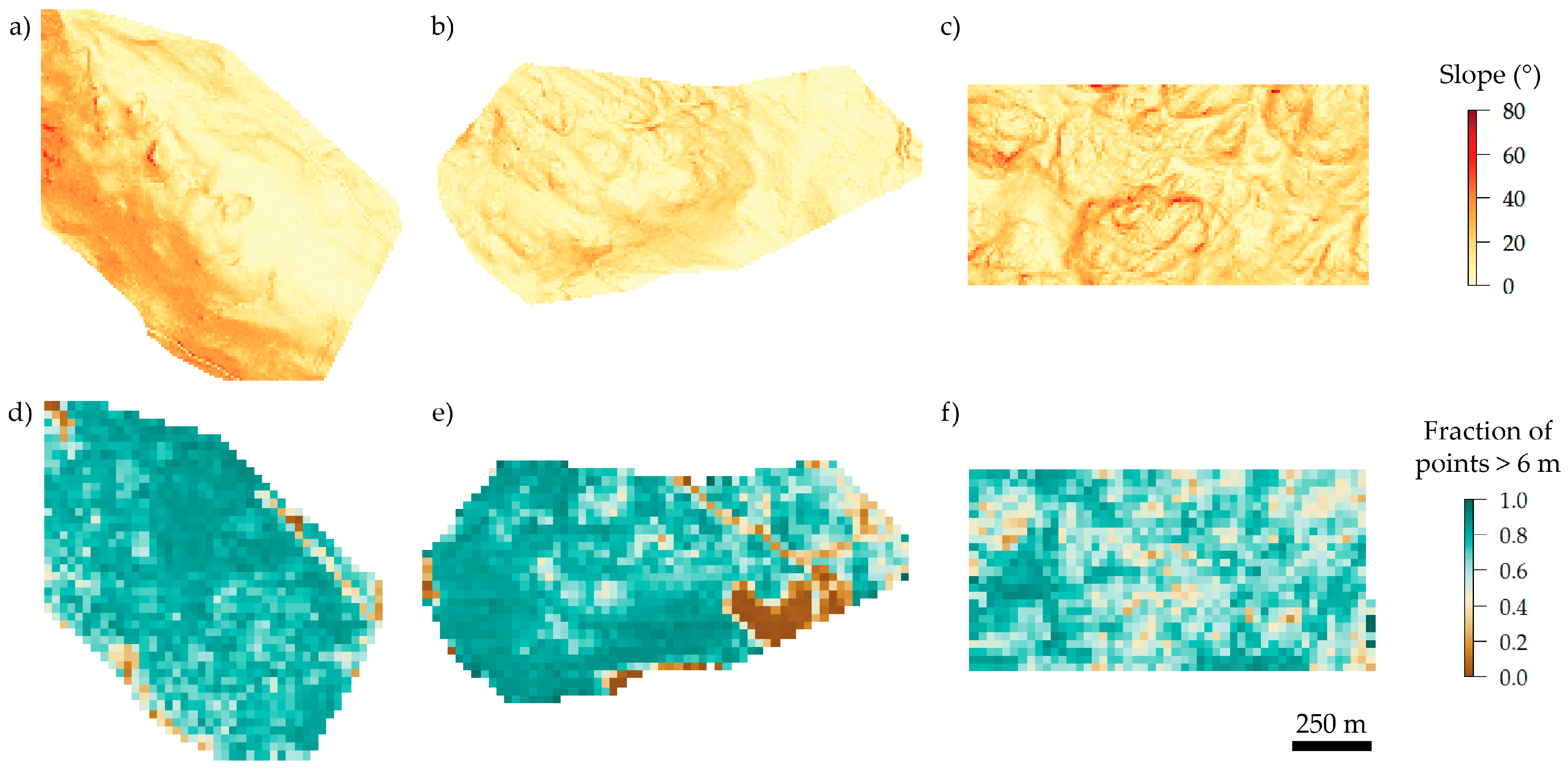
2.1. Study Area
2.2. Image Acquisition
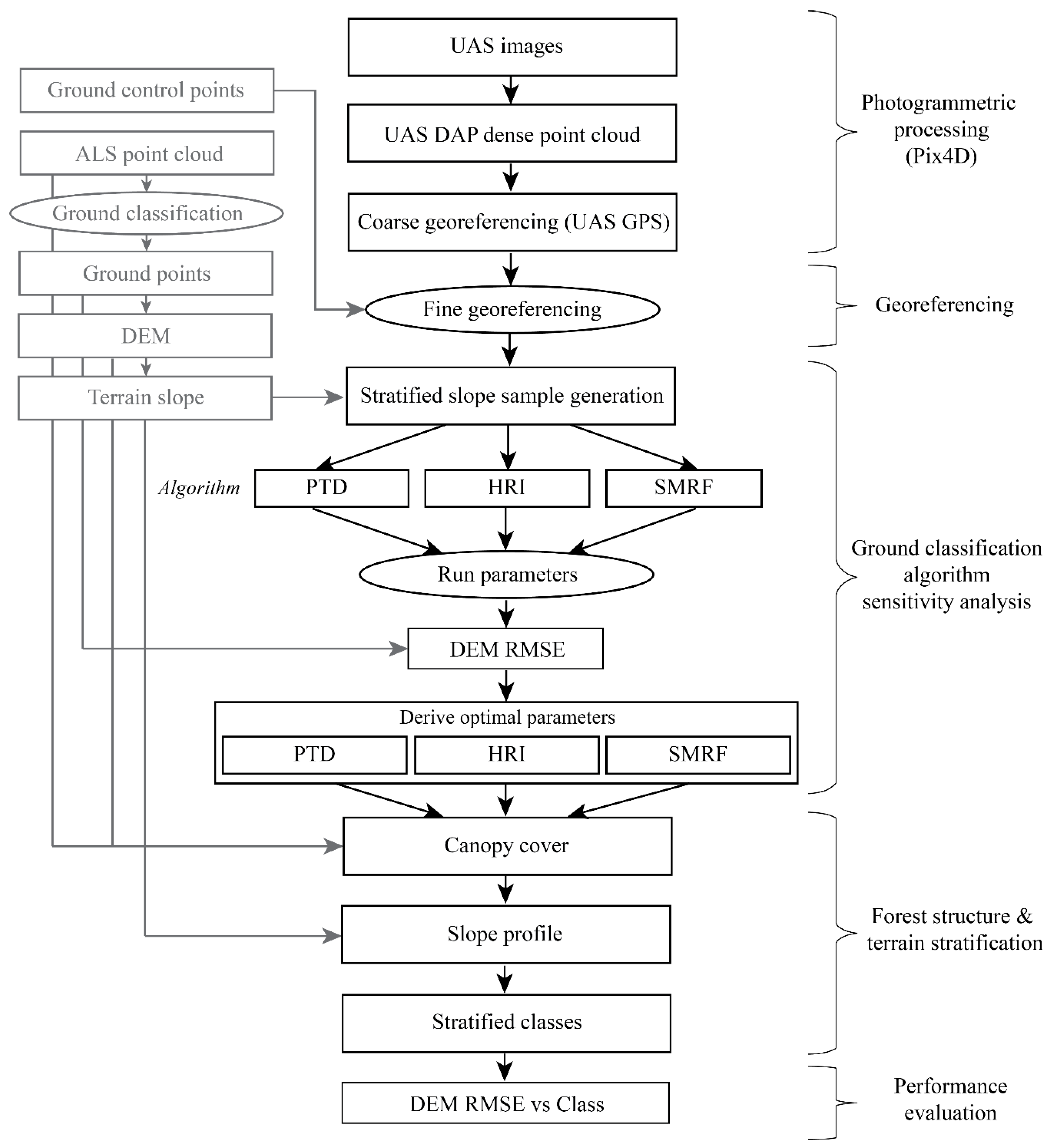
2.3. Georeferencing
2.4. Structure-from-Motion Point Cloud Processing
2.5. ALS Acquisition and Ground-Point Classification
2.6. UAS DAP Ground-Point Classification
2.7. DEM Generation
2.8. Ground Classification Algorithm Sensitivity Analysis
2.9. Ground-Point Classification Algorithm Accuracy
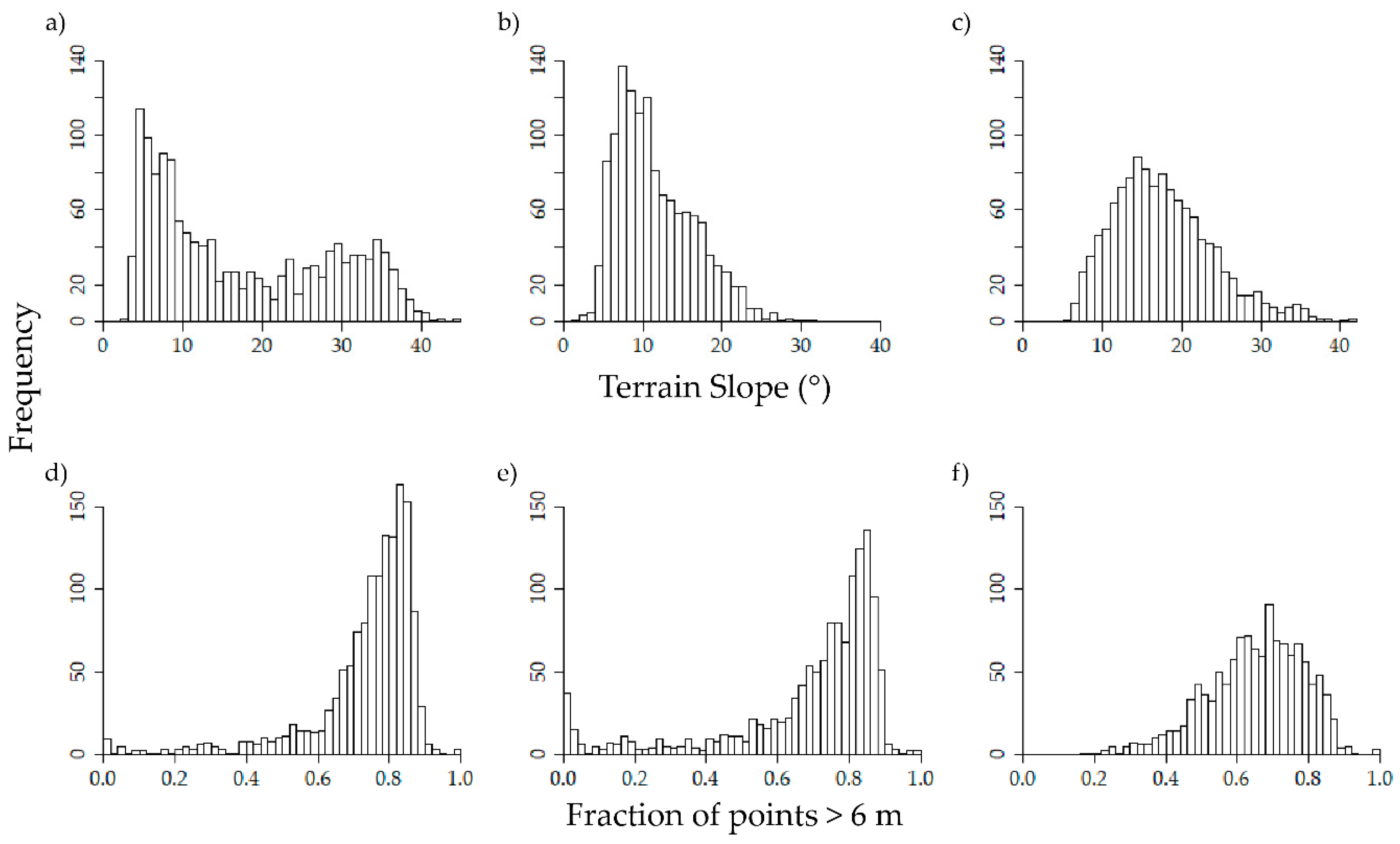
2.10. DEM Accuracy under Various Forest Cover and Terrain Slope
2.11. Software
3. Results
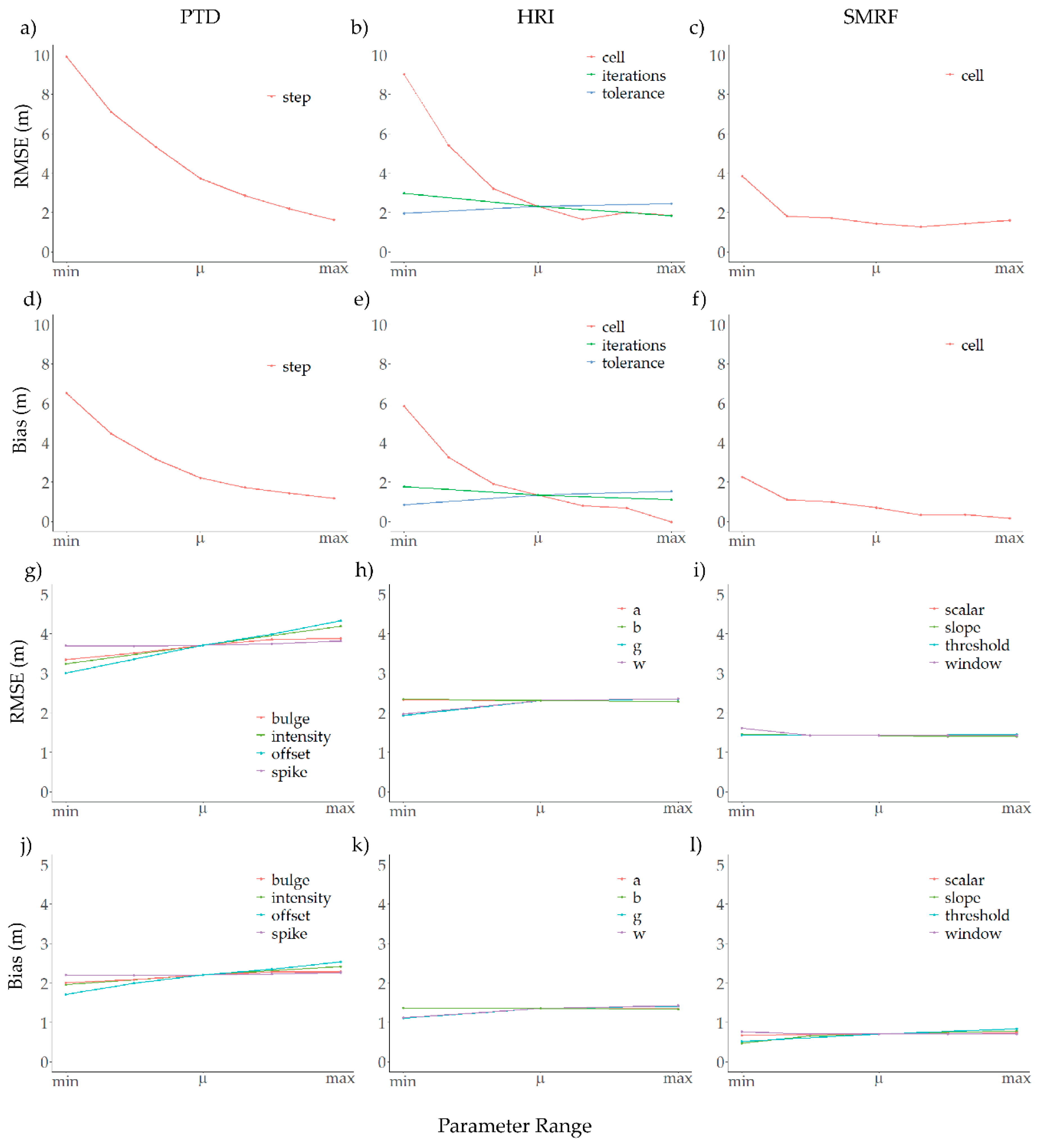
3.1. Ground-Classification Algorithm Sensitivity Analysis
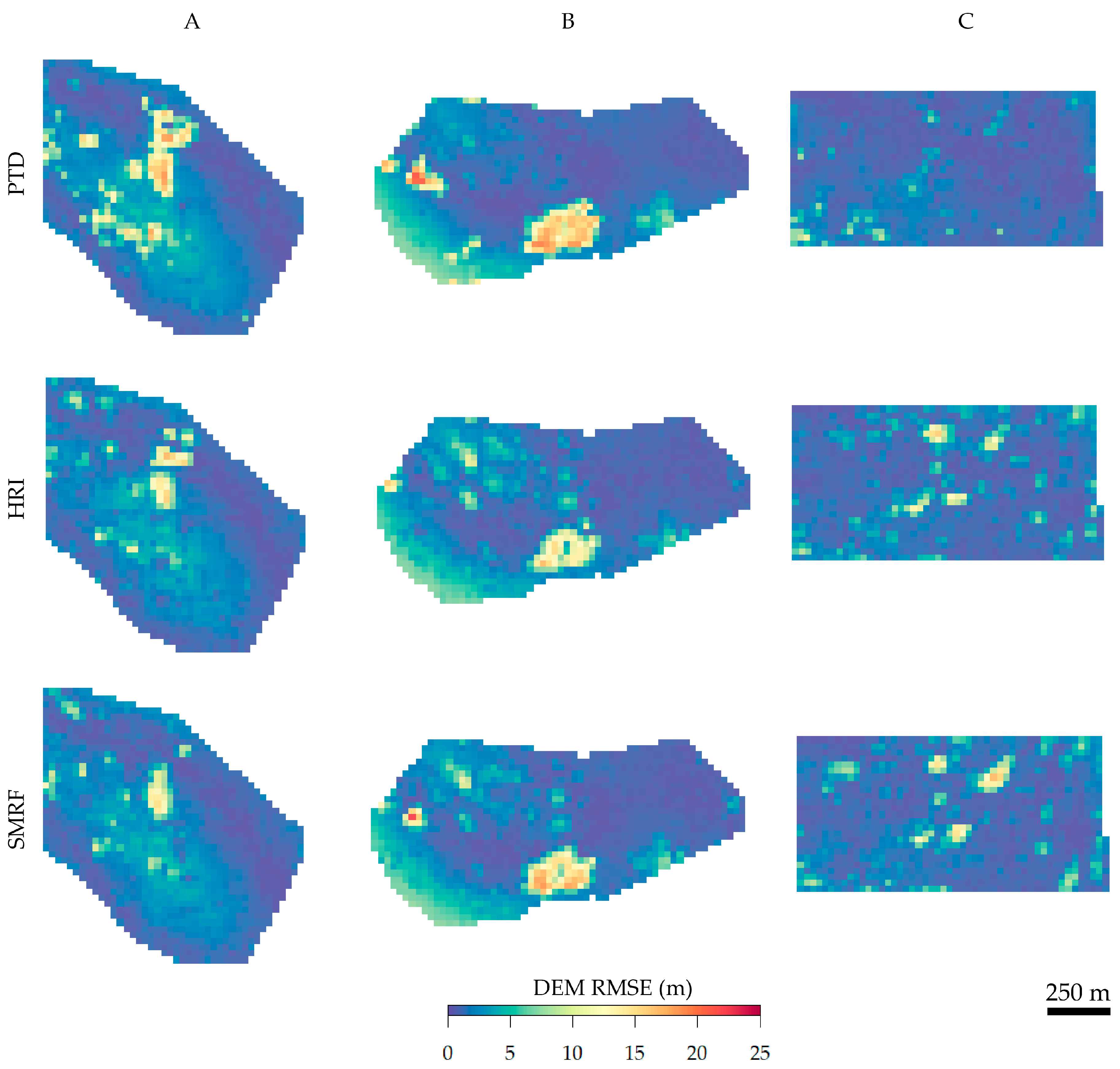
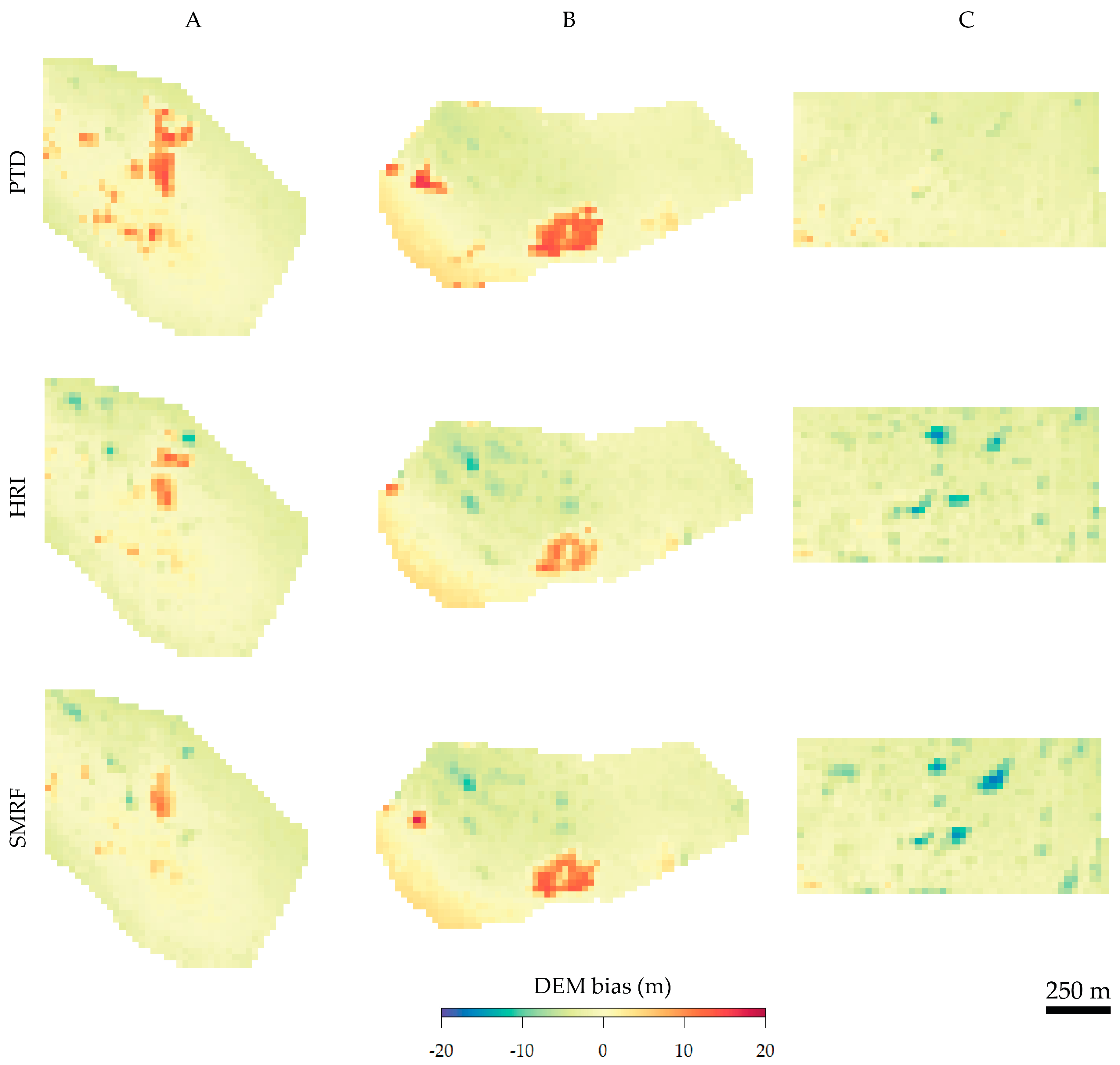
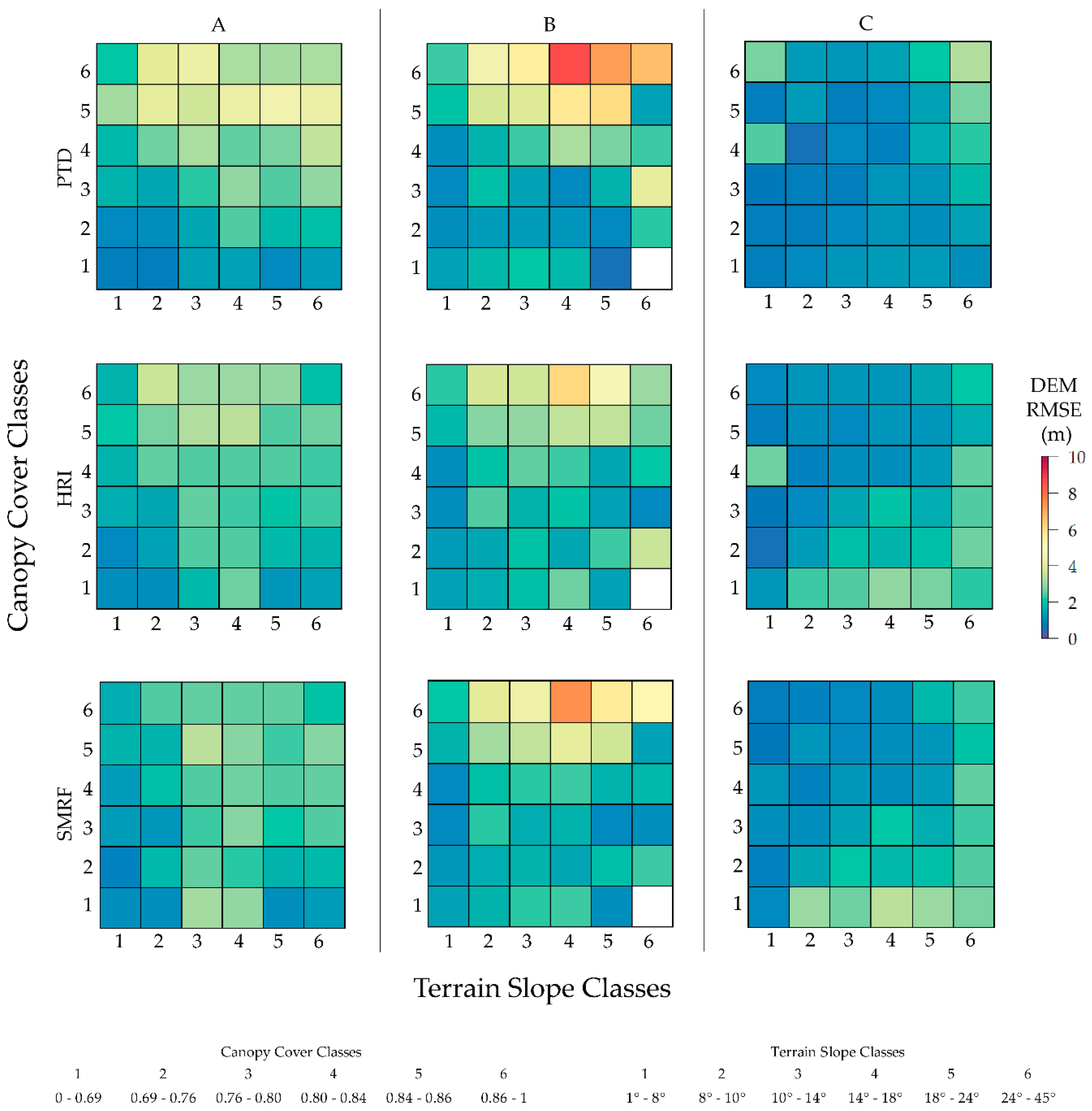
3.2. DEM Accuracy under Various Forest Cover and Terrain Slopes
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Korpela, I. Individual Tree Measurements by Means of Digital Aerial Photogrammetry; Silva Fennica: Helsinki, Finland, 2004; ISBN 0037-5330. [Google Scholar]
- Takahashi, T.; Yamamoto, K.; Senda, Y.; Tsuzuku, M. Estimating individual tree heights of sugi (Cryptomeria japonica D. Don) plantations in mountainous areas using small-footprint airborne LiDAR. J. Res. 2005, 10, 135–142. [Google Scholar] [CrossRef]
- Wang, Y.; Weinacker, H.; Koch, B. A Lidar Point Cloud Based Procedure for Vertical Canopy Structure Analysis And 3D Single Tree Modelling in Forest. Sensors 2008, 8, 3938–3951. [Google Scholar] [CrossRef] [PubMed]
- Mohan, M.; Silva, C.; Klauberg, C.; Jat, P.; Catts, G.; Cardil, A.; Hudak, A.; Dia, M. Individual Tree Detection from Unmanned Aerial Vehicle (UAV) Derived Canopy Height Model in an Open Canopy Mixed Conifer Forest. Forests 2017, 8, 340. [Google Scholar] [CrossRef]
- Gatziolis, D.; Lienard, J.F.; Vogs, A.; Strigul, N.S. 3D Tree Dimensionality Assessment Using Photogrammetry and Small Unmanned Aerial Vehicles. PLoS ONE 2015, 10, e0137765. [Google Scholar] [CrossRef] [PubMed]
- White, J.C.; Wulder, M.A.; Varhola, A.; Vastaranta, M.; Coops, N.C.; Cook, B.D.; Pitt, D.; Woods, M. A best practices guide for generating forest inventory attributes from airborne laser scanning data using an area-based approach. For. Chron. 2013, 89, 722–723. [Google Scholar] [CrossRef] [Green Version]
- Corona, P.; Fattorini, L. Area-based lidar-assisted estimation of forest standing volume. Can. J. For. Res. 2008, 38, 2911–2916. [Google Scholar] [CrossRef] [Green Version]
- Turner, W.; Spector, S.; Gardiner, N.; Fladeland, M.; Sterling, E.; Steininger, M. Remote sensing for biodiversity science and conservation. Trends Ecol. Evol. 2003, 18, 306–314. [Google Scholar] [CrossRef]
- Vierling, K.T.; Vierling, L.A.; Gould, W.A.; Martinuzzi, S.; Clawges, R.M. Lidar: Shedding new light on habitat characterization and modeling. Front. Ecol. Environ. 2008, 6, 90–98. [Google Scholar] [CrossRef]
- Clarke, R.; Moses, L.B. The regulation of civilian drones’ impacts on public safety. Comput. Law Secur. Rev. 2014, 30, 263–285. [Google Scholar] [CrossRef]
- Saha, B.; Koshimoto, E.; Quach, C.C.; Hogge, E.F.; Strom, T.H.; Hill, B.L.; Vazquez, S.L.; Goebel, K. Battery health management system for electric UAVs. IEEE Aerosp. Conf. Proc. 2011, 1–9. [Google Scholar] [CrossRef]
- Amilton, J.A.D.H. Drones: A Rising Market. Appl. Econ. 2009, 91, 1257–1258. [Google Scholar] [CrossRef]
- Malaek, S.M.; Kosari, A.R. Novel minimum time trajectory planning in terrain following flights. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 2–12. [Google Scholar] [CrossRef]
- Shi, Y.; Thomasson, J.A.; Murray, S.C.; Pugh, N.A.; Rooney, W.L.; Shafian, S. Unmanned Aerial Vehicles for High-Throughput Phenotyping and Agronomic Research. PLoS ONE 2016, 11, e0159781. [Google Scholar] [CrossRef] [PubMed]
- Scaioni, M.; Barazzetti, L.; Brumana, R.; Cuca, B.; Fassi, F.; Prandi, F. RC-Heli and structure & motion techniques for the 3-D reconstruction of a Milan Dome spire. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2009, 38, 8. [Google Scholar]
- Turner, D.; Lucieer, A.; Watson, C. An automated technique for generating georectified mosaics from ultra-high resolution Unmanned Aerial Vehicle (UAV) imagery, based on Structure from Motion (SFM) point clouds. Remote Sens. 2012, 4, 1392–1410. [Google Scholar] [CrossRef]
- Baltsavias, E.P. A comparison between photogrammetry and laser scanning. ISPRS J. Photogramm. Remote Sens. 1999, 54, 83–94. [Google Scholar] [CrossRef]
- Means, J.; Acker, S.; Fitt, B.; Renslow, M.; Emerson, L.; Hendrix, C. Predicting forest stand characteristics with airborne scanning lidar. Photogramm. Eng. Remote Sens. 2000, 66, 1367–1371. [Google Scholar] [CrossRef]
- Neitzel, F.; Klonowski, J. Mobile 3D mapping with a low-cost UAV system. Int. Arch. Photogramm. Remote Sens. Inf. Sci. 2011, 38, 1–6. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using Unmanned Aerial Vehicles (UAV) for High-Resolution Reconstruction of Topography: The Structure from Motion Approach on Coastal Environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef] [Green Version]
- Mathews, A.; Jensen, J.L.R. Visualizing and Quantifying Vineyard Canopy LAI Using an Unmanned Aerial Vehicle (UAV) Collected High Density Structure from Motion Point Cloud. Remote Sens. 2013, 5, 2164–2183. [Google Scholar] [CrossRef] [Green Version]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of Forest Structure Using Two UAV Techniques: A Comparison of Airborne Laser Scanning and Structure from Motion (SfM) Point Clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. “Structure-from-Motion” photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Woodcock, W.E. Aerial Reconnaissance and Photogrammetry with Small Cameras. Photogramm. Eng. Remote Sens. 1976, 42, 503–511. [Google Scholar]
- Helava, U.V. Digital correlation in photogrammetric instruments. Photogrammetria 1978, 34, 19–41. [Google Scholar] [CrossRef]
- Lane, S.N.; James, T.D.; Crowell, M.D. Application of digital photogrammetry to complex topography for geomorphological research. Photogramm. Rec. 2000, 16, 793–821. [Google Scholar] [CrossRef]
- Smith, M.W.; Carrivick, J.L.; Quincey, D.J. Structure from motion photogrammetry in physical geography. Prog. Phys. Geogr. 2015, 40, 247–275. [Google Scholar] [CrossRef] [Green Version]
- Tompalski, P.; Coops, N.C.; Marshall, P.L.; White, J.C.; Wulder, M.A.; Bailey, T. Combining multi-date airborne laser scanning and digital aerial photogrammetric data for forest growth and yield modelling. Remote Sens. 2018, 10, 347. [Google Scholar] [CrossRef]
- Goodbody, T.R.H.; Coops, N.C.; Hermosilla, T.; Tompalski, P.; Pelletier, G. Vegetation Phenology Driving Error Variation in Digital Aerial Photogrammetrically Derived Terrain Models. Remote Sens. 2018, 10, 1554. [Google Scholar] [CrossRef]
- Iizuka, K.; Yonehara, T.; Itoh, M.; Kosugi, Y. Estimating Tree Height and Diameter at Breast Height (DBH) from Digital surface models and orthophotos obtained with an unmanned aerial system for a Japanese Cypress (Chamaecyparis obtusa) Forest. Remote Sens. 2018, 10, 13. [Google Scholar] [CrossRef]
- Guerra-Hernández, J.; González-Ferreiro, E.; Monleón, V.; Faias, S.; Tomé, M.; Díaz-Varela, R. Use of Multi-Temporal UAV-Derived Imagery for Estimating Individual Tree Growth in Pinus pinea Stands. Forests 2017, 8, 300. [Google Scholar] [CrossRef]
- Rahlf, J.; Breidenbach, J.; Solberg, S.; Naesset, E.; Astrup, R. Digital aerial photogrammetry can efficiently support large-area forest inventories in Norway. For. Int. J. For. Res. For. 2017, 90, 710–718. [Google Scholar] [CrossRef]
- Goodbody, T.R.H.; Coops, N.C.; Tompalski, P.; Crawford, P.; Day, K.J.K. Updating residual stem volume estimates using ALS-and UAV-acquired stereo-photogrammetric point clouds Updating residual stem volume estimates using ALS-and UAV-acquired stereo-photogrammetric point clouds. Int. J. Remote Sens. 2016, 38, 2938–2953. [Google Scholar] [CrossRef]
- Clapuyt, F.; Vanacker, V.; Van Oost, K. Reproducibility of UAV-based earth topography reconstructions based on Structure-from-Motion algorithms. Geomorphology 2016, 260, 4–15. [Google Scholar] [CrossRef]
- Jensen, J.L.R.; Mathews, A.J. Assessment of image-based point cloud products to generate a bare earth surface and estimate canopy heights in a woodland ecosystem. Remote Sens. 2016, 8, 50. [Google Scholar] [CrossRef]
- Ota, T.; Ogawa, M.; Shimizu, K.; Kajisa, T.; Mizoue, N.; Yoshida, S.; Takao, G.; Hirata, Y.; Furuya, N.; Sano, T.; et al. Aboveground biomass estimation using structure from motion approach with aerial photographs in a seasonal tropical forest. Forests 2015, 6, 3882–3898. [Google Scholar] [CrossRef]
- Lucieer, A.; de Jong, S.M.; Turner, D. Mapping landslide displacements using Structure from Motion (SfM) and image correlation of multi-temporal UAV photography. Prog. Phys. Geogr. 2014, 38, 97–116. [Google Scholar] [CrossRef]
- Fonstad, M.A.; Dietrich, J.T.; Courville, B.C.; Jensen, J.L.; Carbonneau, P.E. Topographic structure from motion: A new development in photogrammetric measurement. Earth Surf. Process. Landf. 2013, 38, 421–430. [Google Scholar] [CrossRef]
- Harwin, S.; Lucieer, A. Assessing the accuracy of georeferenced point clouds produced via multi-view stereopsis from Unmanned Aerial Vehicle (UAV) imagery. Remote Sens. 2012, 4, 1573–1599. [Google Scholar] [CrossRef]
- Niethammer, U.; James, M.R.; Rothmund, S.; Travelletti, J.; Joswig, M. UAV-based remote sensing of the Super-Sauze landslide: Evaluation and results. Eng. Geol. 2012, 128, 2–11. [Google Scholar] [CrossRef]
- St-Onge, B.; Vega, C.; Fournier, R.A.; Hu, Y. Mapping canopy height using a combination of digital stereo-photogrammetry and lidar. Int. J. Remote Sens. 2008, 29, 3343–3364. [Google Scholar] [CrossRef]
- Korpela, I.; Anttila, P. Appraisal of the Mean Height of Trees by Means of Image Matching of Digitised Aerial Photographs. Photogramm. J. Finl. 2004, 19, 23–36. [Google Scholar]
- Meng, X.; Currit, N.; Zhao, K. Ground Filtering Algorithms for Airborne LiDAR Data: A Review of Critical Issues. Remote Sens. 2010, 2, 833–860. [Google Scholar] [CrossRef] [Green Version]
- Yan, L.; Liu, H.; Tan, J.; Li, Z.; Chen, C. A Multi-Constraint Combined Method for Ground Surface Point Filtering from Mobile LiDAR Point Clouds. Remote Sens. 2017, 9, 958. [Google Scholar] [CrossRef]
- Barnard, S.T.; Fischler, M.A. Computational Stereo. ACM Comput. Surv. (CSUR) 1982, 14, 553–572. [Google Scholar] [CrossRef]
- Kachamba, D.J.; Ørka, H.O.; Næsset, E.; Eid, T.; Gobakken, T. Influence of plot size on efficiency of biomass estimates in inventories of dry tropical forests assisted by photogrammetric data from an unmanned aircraft system. Remote Sens. 2017, 9, 610. [Google Scholar] [CrossRef]
- Guerra-Hernández, J.; Cosenza, D.N.; Carlos, L.; Rodriguez, E.; Silva, M.; Tomé, M.; Díaz-Varela, R.A.; González-Ferreiro, E.; González, E.; Carlos Estraviz Rodriguez, L. Eucalyptus plantations. Int. J. Remote Sens. 2018, 39, 5211–5235. [Google Scholar] [CrossRef]
- Day, K. History of the UBC Alex Fraser Research Forest (1987–2007)—Excerpts from Management and Working Plan # 3; University of British Columbia Alex Fraser Research Forest: Williams Lake, BC, Canada, 2007; Available online: http://afrf-forestry.sites.olt.ubc.ca/files/2012/03/MWP3WebQuality.pdf (accessed on 12 November 2018).
- Klinka, K. Site Identification Tools, Field Site Maps, and Polygon Summaries for the UBC Alex Fraser Research Forest; UBC Alex Fraser Research Forest: Williams Lake, BC, Canada, 2004. [Google Scholar]
- Soverel, N.O.; Perrakis, D.D.B.; Coops, N.C. Estimating burn severity from Landsat dNBR and RdNBR indices across western Canada. Remote Sens. Environ. 2010, 114, 1896–1909. [Google Scholar] [CrossRef]
- Pix4Dmapper Pro Version 4.1. Available online: https://www.pix4d.com/ (accessed on 10 Decemeber 2018).
- Coops, N.C.; Duffe, J.; Koot, C. Assessing the utility of lidar remote sensing technology to identify mule deer winter habitat. Can. J. Remote Sens. 2010, 36, 81–88. [Google Scholar] [CrossRef]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An easy-to-use airborne LiDAR data filtering method based on cloth simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Asghar, U. Landslide Mapping from Analysis of UAV-SFM Point Clouds. Ph.D. Thesis, University of British Columbia, Vancouver, BC, Canada, 2017. [Google Scholar]
- Jat, P.; Serre, M.L. Bayesian Maximum Entropy space/time estimation of surface water chloride in Maryland using river distances. Environ. Pollut. 2016, 219, 1148–1155. [Google Scholar] [CrossRef]
- Jat, P.; Serre, M.L. A novel geostatistical approach combining Euclidean and gradual-flow covariance models to estimate fecal coliform along the Haw and Deep rivers in North Carolina. Stoch. Environ. Res. Risk Assess. 2018, 32. [Google Scholar] [CrossRef]
- Sithole, G.; Vosselman, G. Experimental comparison of filter algorithms for bare-Earth extraction from airborne laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2004, 59, 85–101. [Google Scholar] [CrossRef]
- Axelsson, P. Processing of laser scanner data—Algorithms and applications. ISPRS J. Photogramm. Remote Sens. 1999, 54, 138–147. [Google Scholar] [CrossRef]
- Axelsson, P. DEM Generation from Laser Scanner Data Using adaptive TIN Models. Int. Arch. Photogramm. Remote Sens. 2000, 33, 110–117. [Google Scholar] [CrossRef]
- Kraus, K.; Pfeifer, N. Determination of terrain models in wooded areas with airborne laser scanner data. ISPRS J. Photogramm. Remote Sens. 1998, 53, 193–203. [Google Scholar] [CrossRef]
- Pingel, T.J.; Clarke, K.C.; Mcbride, W.A. An improved simple morphological filter for the terrain classification of airborne LIDAR data. ISPRS J. Photogramm. Remote Sens. 2013, 77, 21–30. [Google Scholar] [CrossRef]
- Kilian, J.; Haala, N.; Markus, E. Capture and evaluation of airborne laser scanner data. Int. Arch. Photogramm. Remote Sens. 1996, 31, 383–388. [Google Scholar]
- Zhang, K.; Chen, S.C.; Whitman, D.; Shyu, M.L.; Yan, J.; Zhang, C. A progressive morphological filter for removing nonground measurements from airborne LIDAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 872–882. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Lin, X. Filtering airborne LiDAR data by embedding smoothness-constrained segmentation in progressive TIN densification. ISPRS J. Photogramm. Remote Sens. 2013, 81, 44–59. [Google Scholar] [CrossRef]
- Montealegre, A.L.; Lamelas, M.T.; De La Riva, J. A Comparison of Open—Source LiDAR Filtering Algorithms in a Mediterranean Forest Environment. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 4072–4085. [Google Scholar] [CrossRef]
- Isenburg, M.; Liu, Y.; Shewchuk, J.; Snoeyink, J.; Thirion, T. Generating Raster DEM from Mass Points via TIN Streaming. In International Conference on Geographic Information Science; Springer: Berlin/Heidelberg, Germany, 2006; pp. 186–198. [Google Scholar]
- Hodgson, M.E.; Jensen, J.; Raber, G.; Tullis, J.; Davis, B.A.; Thompson, G.; Schuckman, K. An Evaluation of Lidar-derived Elevation and Terrain Slope in Leaf-off Conditions. Photogramm. Eng. Remote Sens. 2005, 71, 817–823. [Google Scholar] [CrossRef]
- Korhonen, L.; Korpela, I.; Heiskanen, J.; Maltamo, M. Airborne discrete-return LIDAR data in the estimation of vertical canopy cover, angular canopy closure and leaf area index. Remote Sens. Environ. 2011, 115, 1065–1080. [Google Scholar] [CrossRef]
- Nilsson, M. Estimation of tree heights and stand volume using an airborne lidar system. Remote Sens. Environ. 1996, 56, 1–7. [Google Scholar] [CrossRef]
- Isenburg, M. LAStools. Available online: http://lastools.org (accessed on 10 August 2018).
- Roussel, J.-R.; Auty, D. lidR: Airborne LiDAR Data Manipulation and Visualization for Forestry Applications. R Package Version 1.4.1. 2018. Available online: https://CRAN.R-project.org/package=lidR (accessed on 10 August 2018).
- Deckert, C.; Bolstad, P. V Forest canopy, terrain, and distance effects on global positioning system point accuracy. Photogramm. Eng. Remote Sens. 1996, 62, 317–321. [Google Scholar]
- Næsset, E. Point accuracy of combined pseudorange and carrier phase differential GPS under forest canopy. Can. J. For. Res. 1999, 29, 547–553. [Google Scholar] [CrossRef]
- Reutebuch, S.E.; McGaughey, R.J.; Andersen, H.-E.; Carson, W.W. Accuracy of a high-resolution lidar terrain model under a conifer forest canopy. Can. J. Remote Sens. 2003, 29, 527–535. [Google Scholar] [CrossRef] [Green Version]
- Tomaštík, J.; Mokroš, M.; Saloň, Š.; Chudý, F.; Tunák, D. Accuracy of Photogrammetric UAV-Based Point Clouds under Conditions of Partially-Open Forest Canopy. Forests 2017, 8, 151. [Google Scholar] [CrossRef]
- Simpson, J.; Smith, T.; Wooster, M. Assessment of Errors Caused by Forest Vegetation Structure in Airborne LiDAR-Derived DTMs. Remote Sens. 2017, 9, 1101. [Google Scholar] [CrossRef]
- British Columbia—Ministry of Forest, Lands, Natural Resource Operations and Rural Development. Biogeoclimatic Ecosystem Classification (BEC) Map; British Columbia—Ministry of Forest, Lands, Natural Resource Operations and Rural Development: Victoria, BC, Canada, 2018.
- Crowther, T.W.; Glick, H.B.; Covey, K.R.; Bettigole, C.; Maynard, D.S.; Thomas, S.M.; Smith, J.R.; Hintler, G.; Duguid, M.C.; Amatulli, G.; et al. Mapping tree density at a global scale. Nature 2015, 525, 201–205. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Publication | Year | Aerial Platform | Location | Landcover Type | Forest Structure | Ground Detection |
|---|---|---|---|---|---|---|
| [28] | 2018 | MA * | Northern Alberta, Canada | Mixedwood, Boreal and Temperate | √ | |
| [29] | 2018 | UAS | Edmundston, New Brunswick, Canada | Hardwood dominated | √ | |
| [30] | 2017 | UAS | Otsu City, Shiga Prefecture, Japan | Evergreen coniferous | √ | √ |
| [31] | 2017 | UAS | Alcochete, Central Portugal | Pinus pinea plantation | √ | √ |
| [32] | 2017 | MA | Central Norway | Temperate, coniferous | √ | |
| [33] | 2016 | UAS | Central British Columbia, Canada | Young coniferous (<15 years since clearcut) | √ | |
| [34] | 2016 | UAS | Central Belgium | Pasture, arable fields without crops | √ | |
| [35] | 2016 | UAS | Edwards Plateau, Central Texas, USA | Savannah, undulating hills, evergreen | √ | √ |
| [36] | 2015 | MA | Central Cambodia | Evergreen, deciduous, | √ | |
| [37] | 2014 | UAS | Southern Tasmania, Australia | Landslide zone, exposed soil, short grass | √ | |
| [38] | 2013 | Helium Blimp | Central Texas, USA | Bedrock | √ | |
| [39] | 2012 | UAS | Southeast Tasmania, Australia | Scattered shrubs, Coastal marsh, erosion scarp | √ | |
| [40] | 2012 | UAS | Southern Alps, France | Landslide zone, bedrock, exposed soil | √ | |
| [41] | 2008 | MA | New Brunswick, Canada | Boreal forest | √ | |
| [42] | 2004 | MA | Southern Finland | Temperate, coniferous | √ |
| System Specifications | |
|---|---|
| Aircraft | |
| Max Flight Time | 28 min |
| Navigation | GPS & GLONASS |
| GPS Positional Accuracy | 0.5 m (z), 1.5 m (x,y) |
| Transmission Range | 5 km |
| Camera | |
| Sensor | 1/2.3” CMOS |
| ISO Range | 100–1600 (photo) |
| Electronic Shutter Speed | 1/8000s |
| FOV | 94° |
| Aperture | f/2.8 |
| Image Size | 4000 × 3000 |
| Acquisition Parameters | |
| Altitude | ~100 m (AGL) |
| Terrain Following | 30 m SRTM * |
| Image Overlap | >75% Forward, >75% Lateral |
| Image Capture Interval | 2.5 s |
| Write to Disk Speed | 10 Mb/s |
| UAS Flight Area | GPS | GCP Image Identification Accuracy | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Site | Size (ha) | Mean GSD (cm) | # of GCP | Mean HRMS (m) | Mean VRMS (m) | # of Marked Images | RMS Error X (m) | RMS Error Y (m) | RMS Error Z (m) |
| A | 131 | 4.69 | 9 | 1.382 | 1.964 | 204 | 0.088 | 0.082 | 0.114 |
| B | 116 | 4.88 | 10 | 1.662 | 2.874 | 101 | 0.483 | 0.724 | 2.507 |
| C | 123 | 4.97 | 10 | 0.617 | 0.882 | 105 | 1.026 | 2.309 | 3.320 |
| Publication | Class | Key Method | Tested Parameters | Software Implementation |
|---|---|---|---|---|
| [58,59] | Surface | PTD | step-size, initial search intensity, bulge, spike, ground offset | LAStools |
| [60] | Surface | HRI | cell-size, tolerance distance, a, b, g, w, iterations | FUSION |
| [61] | Morphological | SMRF | cell-size, cut-net size, elevation scalar, slope, elevation threshold, max window size | Point Data Abstraction Library (PDAL) |
| Method | Parameter | Description | Values |
|---|---|---|---|
| PTD | step | initial grid resolution for assigning TIN seed points (m) | 1, 5, 9, 13, 17, 21, 25 * |
| intensity | initial ground point search intensity | coarse, fine, hyper-fine | |
| bulge | positive height coarse TIN surface can bulge during refinement (m) | 0.1, 0.6, 1.1, 1.6, 2.1 | |
| spike | height threshold to remove localized positive vertical spikes (m) | 0.1, 0.6, 1.1, 1.6, 2.1 | |
| offset | positive vertical offset from ground estimate to include points (m) | 0.1, 0.6, 1.1, 0.6, 2.1 | |
| HRI | cell | cell-size used for intermediate surface models (m) | 1, 5, 9, 13, 17, 21, 25 |
| g | see Equation (1). | −2.2, −2.0 *, −1.8 | |
| w | 2.25, 2.5 *, 2.75 | ||
| a | 0.9, 1.0 *, 1.1 | ||
| b | 3.6, 4.0 *, 4.4 | ||
| tolerance | vertical tolerance for final classification of ground points | 0.1, 1.1, 2.1 | |
| iterations | number of iterations for classification logic | 3, 5 *, 7 | |
| SMRF | cell | grid cell resolution of ground point search (m) | 1, 5, 9, 13, 17, 21, 25 |
| slope | slope threshold to exclude adjacent ground points (%) | 0.05, 0.10, 0.15 *, 0.20, 0.25 | |
| scalar | scaling value to be multiplied by slope of provisional DEM | 0.75, 1.00, 1.25 *, 1.50, 1.75 | |
| threshold | vertical distance from provisional DEM to include points (m) | 0.1, 0.5 *, 0.9 | |
| window | max search radius for including points in the provisional DEM (m) | 10, 14, 18 *, 22, 26 | |
| cut | spacing of minimum values used for removing large objects (m) | 0 * |
| Method | Parameter | Optimal Value |
|---|---|---|
| PTD | step | 21 |
| intensity | coarse | |
| bulge | 0.1 | |
| spike | 0.1 | |
| offset | 0.1 | |
| HRI | cell | 17 |
| g | −2.2 | |
| w | 2.25 | |
| a | 1.1 | |
| b | 4.4 | |
| tolerance | 0.1 | |
| iterations | 7 | |
| SMRF | cell | 21 |
| slope | 0.05 | |
| scalar | 0.75 | |
| threshold | 0.1 | |
| window | 22 | |
| cut | 0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Graham, A.; Coops, N.C.; Wilcox, M.; Plowright, A. Evaluation of Ground Surface Models Derived from Unmanned Aerial Systems with Digital Aerial Photogrammetry in a Disturbed Conifer Forest. Remote Sens. 2019, 11, 84. https://doi.org/10.3390/rs11010084
Graham A, Coops NC, Wilcox M, Plowright A. Evaluation of Ground Surface Models Derived from Unmanned Aerial Systems with Digital Aerial Photogrammetry in a Disturbed Conifer Forest. Remote Sensing. 2019; 11(1):84. https://doi.org/10.3390/rs11010084
Chicago/Turabian StyleGraham, Alexander, Nicholas C. Coops, Michael Wilcox, and Andrew Plowright. 2019. "Evaluation of Ground Surface Models Derived from Unmanned Aerial Systems with Digital Aerial Photogrammetry in a Disturbed Conifer Forest" Remote Sensing 11, no. 1: 84. https://doi.org/10.3390/rs11010084
APA StyleGraham, A., Coops, N. C., Wilcox, M., & Plowright, A. (2019). Evaluation of Ground Surface Models Derived from Unmanned Aerial Systems with Digital Aerial Photogrammetry in a Disturbed Conifer Forest. Remote Sensing, 11(1), 84. https://doi.org/10.3390/rs11010084