Rapid Mosaicking of Unmanned Aerial Vehicle (UAV) Images for Crop Growth Monitoring Using the SIFT Algorithm

 ,
, 
 and
and
Abstract
:
1. Introduction
2. Methodology
2.1. Image Mosaicking Method Based on the Standard SIFT Algorithm
2.1.1. Extraction of Feature Points from Images
2.1.2. Removal of Mismatched Points
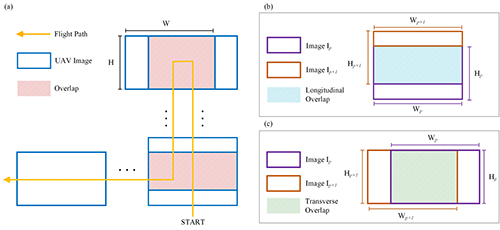
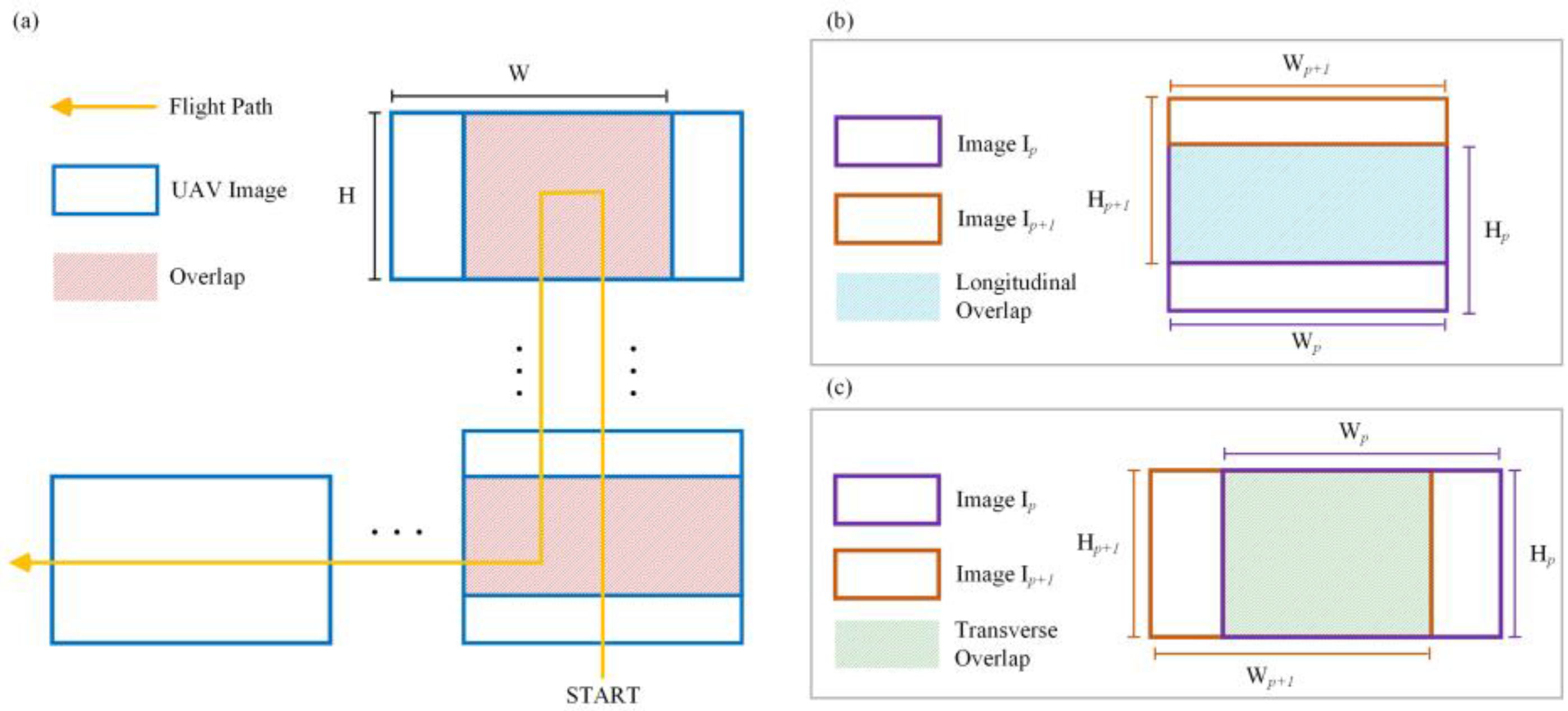
2.2. Proposed Mosaicking Method Based on SIFT and RANSAC
| Algorithm 1 The procedure for the proposed algorithm. |
| Input: A Set of UAV Images I Output: Mosaic Result U |
| 1 Construct contrasts of image for set by Equation (4); 2 Compute average contrast of image by Equation (5); 3 if I are obtained by visible-light or near-infrared cameras then 4 Compute Dinit by Equation (6); 5 end if 6 if I are obtained by thermal infrared cameras then 7 Compute Dinit by Equation (7); 8 end if 9 Construct corresponding feature point sets F using Dinit; 10 Initialize k1= 1.1, k2 = 1/1.1, Pmin, Pmax, F; 11 repeat 12 Step: 13 Update Dnew by Equation (8); 14 until F satisfies; 15 Update F by Equations (9) and (10); 16 Initialize Prow, Pcol; 17 if Ip and Ip+1 have longitudinal overlap then 18 Update F using Prow by Equations (11) and (12); 19 end if 20 if Ip and Ip+1 have transverse overlap then 21 Update F using Pcol by Equations (13) and (14); 22 end if 23 U are acquired by F. |
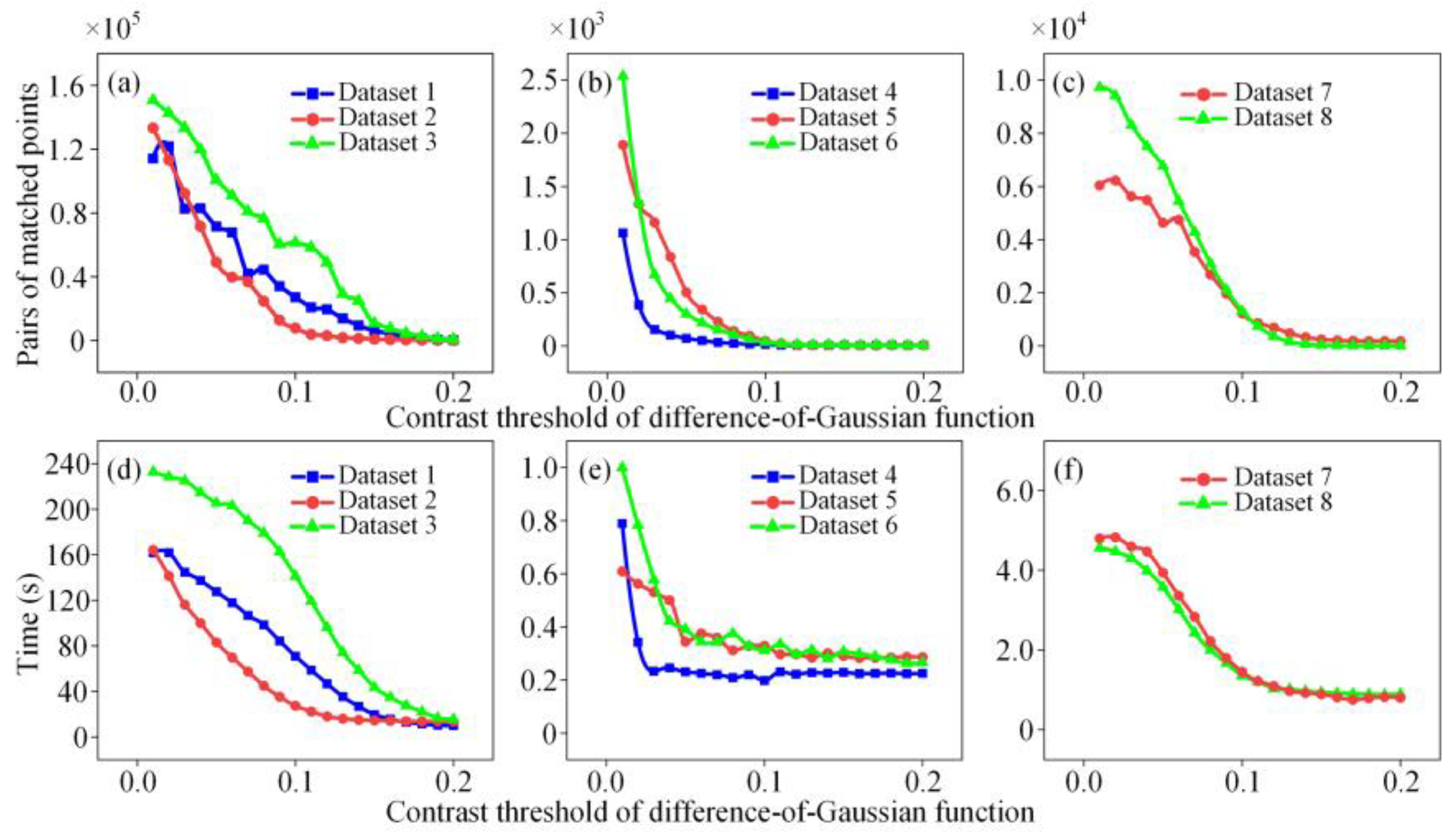
2.2.1. Determination of the Dynamic Contrast Threshold
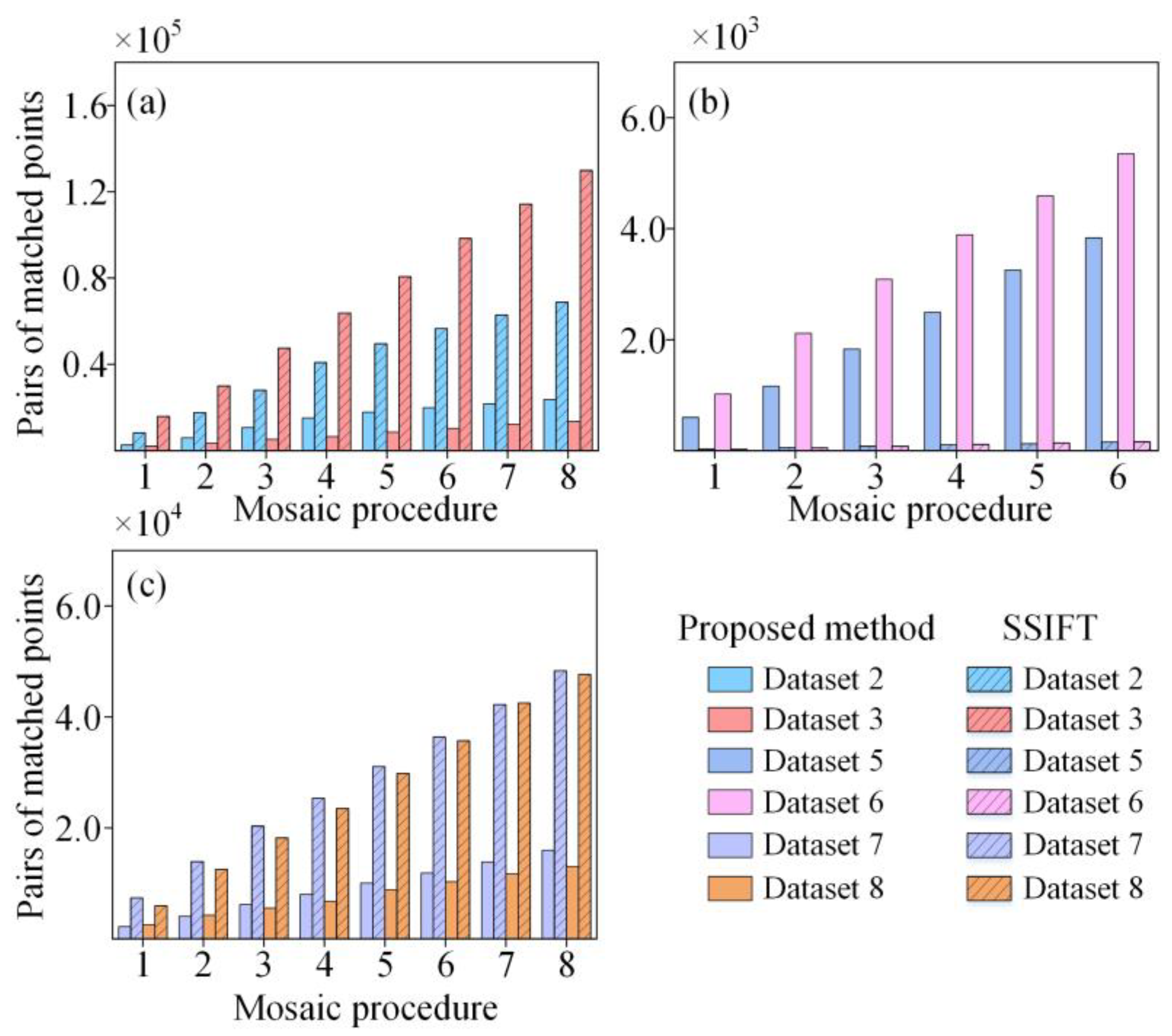
2.2.2. Improved Removal of Mismatched Points
3. Experiment
3.1. Experiment Design
3.2. Comparison Method
4. Results and Discussion
4.1. Dynamic Setting for the Contrast Threshold
4.2. Removal of Mismatched Point Pairs
4.3. Applicability of Algorithm to Images from Different Sources
4.4. Applicability of Algorithm to Images from Different Growing Periods
4.5. The Use of Mosaics or Orthomosaics in Crop Growth Monitoring
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Colomina, I.; Molina, P. Unmanned Aerial Systems for Photogrammetry and Remote Sensing: A Review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Lelong, C.; Burger, P.; Jubelin, G.; Roux, B.; Labbé, S.; Baret, F.; Lelong, C.C.D.; Burger, P.; Jubelin, G.; Roux, B.; et al. Assessment of Unmanned Aerial Vehicles Imagery for Quantitative Monitoring of Wheat Crop in Small Plots. Sensors 2008, 8, 3557–3585. [Google Scholar] [CrossRef] [PubMed]
- Hunt, E.R.; Hively, W.D.; Fujikawa, S.J.; Linden, D.S.; Daughtry, C.S.T.; Mccarty, G.W. Acquisition of NIR-Green-Blue Digital Photographs from Unmanned Aircraft for Crop Monitoring. Remote Sens. 2010, 2, 290–305. [Google Scholar] [CrossRef] [Green Version]
- Yue, J.; Lei, T.; Li, C.; Zhu, J. The Application of Unmanned Aerial Vehicle Remote Sensing in Quickly Monitoring Crop Pests. Intell. Autom. Soft Comput. 2012, 18, 1043–1052. [Google Scholar] [CrossRef]
- Lottes, P.; Khanna, R.; Pfeifer, J.; Siegwart, R.; Stachniss, C. UAV-Based Crop and Weed Classification for Smart Farming. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, Singapore, 29 May–3 June 2017; pp. 3024–3031. [Google Scholar] [CrossRef]
- Rokhmana, C.A. The Potential of UAV-Based Remote Sensing for Supporting Precision Agriculture in Indonesia. Procedia Environ. Sci. 2015, 24, 245–253. [Google Scholar] [CrossRef]
- Adão, T.; Hruška, J.; Pádua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J.J. Hyperspectral Imaging: A Review on UAV-Based Sensors, Data Processing and Applications for Agriculture and Forestry. Remote Sens. 2017, 9, 1110. [Google Scholar] [CrossRef]
- Piras, M.; Taddia, G.; Forno, M.G.; Gattiglio, M.; Aicardi, I.; Dabove, P.; Russo, S.L.; Lingua, A. Detailed Geological Mapping in Mountain Areas Using an Unmanned Aerial Vehicle: Application to the Rodoretto Valley, NW Italian Alps. Geomat. Nat. Hazards Risk 2017, 8, 137–149. [Google Scholar] [CrossRef]
- Remondino, F.; Barazzetti, L.; Nex, F.; Scaioni, M.; Sarazzi, D. UAV Photogrammetry for Mapping and 3d Modeling–Current Status and Future Perspectives. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 38, C22. [Google Scholar] [CrossRef]
- Eisenbeiss, H.; Sauerbier, M. Investigation of Uav Systems and Flight Modes for Photogrammetric Applications. Photogramm. Rec. 2011, 26, 400–421. [Google Scholar] [CrossRef]
- Ren, X.; Sun, M.; Zhang, X.; Liu, L. A Simplified Method for UAV Multispectral Images Mosaicking. Remote Sens. 2017, 9, 962. [Google Scholar] [CrossRef]
- Ghosh, D.; Kaabouch, N. A Survey on Image Mosaicing Techniques. J. Vis. Commun. Image Represent. 2016, 34, 1–11. [Google Scholar] [CrossRef]
- Saari, H.; Pellikka, I.; Pesonen, L.; Tuominen, S.; Heikkilä, J.; Holmlund, C.; Mäkynen, J.; Ojala, K.; Antila, T. Unmanned Aerial Vehicle (UAV) Operated Spectral Camera System for Forest and Agriculture Applications. Remote Sens. Agric. Ecosyst. Hydrol. XIII 2011, 8174, 81740H. [Google Scholar] [CrossRef]
- Yaroslavsky, L.P. Digital Picture Processing: An Introduction; Springer-Verlag: Berlin, Germany, 2013; Volume 6. [Google Scholar]
- Zitová, B.; Flusser, J. Image Registration Methods: A Survey. Image Vis. Comput. 2003, 21, 977–1000. [Google Scholar] [CrossRef]
- Bouchafa, S.; Zavidovique, B. Efficient Cumulative Matching for Image Registration. Image Vis. Comput. 2006, 24, 70–79. [Google Scholar] [CrossRef]
- Ma, J.; Zhou, H.; Zhao, J.; Gao, Y.; Jiang, J.; Tian, J. Robust Feature Matching for Remote Sensing Image Registration Via Locally Linear Transforming. IEEE Trans. Geosci. Remote Sens. 2015, 53, 6469–6481. [Google Scholar] [CrossRef]
- Lowe, D.G. Object Recognition from Local Scale-Invariant Features. In Proceedings of the 7th IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999; Volume 2, pp. 1150–1157. [Google Scholar] [CrossRef]
- Lowe, D. Distinctive Image Features from. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Xing, C.; Huang, J. An Improved Mosaic Method Based on SIFT Algorithm for UAV Sequence Images. In Proceedings of the 2010 International Conference On Computer Design and Applications, Qinhuangdao, China, 25–27 June 2010; Volume 1, pp. 414–417. [Google Scholar] [CrossRef]
- Olgun, M.; Onarcan, A.O.; Özkan, K.; Işik, Ş.; Sezer, O.; Özgişi, K.; Ayter, N.G.; Başçiftçi, Z.B.; Ardiç, M.; Koyuncu, O. Wheat Grain Classification by Using Dense SIFT Features with SVM Classifier. Comput. Electron. Agric. 2016, 122, 185–190. [Google Scholar] [CrossRef]
- Solis-Sánchez, L.O.; Castañeda-Miranda, R.; García-Escalante, J.J.; Torres-Pacheco, I.; Guevara-González, R.G.; Castañeda-Miranda, C.L.; Alaniz-Lumbreras, P.D. Scale Invariant Feature Approach for Insect Monitoring. Comput. Electron. Agric. 2011, 75, 92–99. [Google Scholar] [CrossRef]
- Yan, K.; Sukthankar, R. PCA-SIFT: A More Distinctive Representation for Local Image Descriptors. In Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2004. CVPR 2004, Washington, DC, USA, 27 June–2 July 2004; Volome 2, pp. 506–513. [Google Scholar] [CrossRef]
- Ye, M.; Androutsos, D. Robust Affine Invariant Region-Based Shape Descriptors: The ICA Zernike Moment Shape Descriptor and the Whitening Zernike Moment Shape Descriptor. IEEE Signal Process. Lett. 2009, 16, 877–880. [Google Scholar] [CrossRef]
- Mikolajczyk, K.; Schmid, C. A Performance Evaluation of Local Descriptors. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 1615–1630. [Google Scholar] [CrossRef]
- Sedaghat, A.; Mokhtarzade, M.; Ebadi, H. Uniform Robust Scale-Invariant Feature Matching for Optical Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4516–4527. [Google Scholar] [CrossRef]
- Song, Z.; Li, S.; George, T.F. Remote Sensing Image Registration Approach Based on a Retrofitted SIFT Algorithm and Lissajous-Curve Trajectories. Opt. Express 2010, 18, 513. [Google Scholar] [CrossRef] [PubMed]
- Azad, P.; Asfour, T.; Dillmann, R. Combining Harris Interest Points and the SIFT Descriptor for Fast Scale-Invariant Object Recognition. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 4275–4280. [Google Scholar] [CrossRef]
- Du, M.; Noguchi, N. Monitoring of Wheat Growth Status and Mapping of Wheat Yield’s Within-Field Spatial Variations Using Color Images Acquired from UAV-Camera System. Remote Sens. 2017, 9, 289. [Google Scholar] [CrossRef]
- Gómez-Candón, D.; De Castro, A.I.; López-Granados, F. Assessing the Accuracy of Mosaics from Unmanned Aerial Vehicle (UAV) Imagery for Precision Agriculture Purposes in Wheat. Precis. Agric. 2014, 15, 44–56. [Google Scholar] [CrossRef]
- Aicardi, I.; Nex, F.C.; Gerke, M.; Lingua, A.M. An Image-Based Approach for the Co-Registration of Multi-Temporal UAV Image Datasets. Remote Sens. 2016, 8, 779. [Google Scholar] [CrossRef]
- Liu, L.; Wei, Z.; Liu, X.; Yang, Z. Research of Registration Approaches of Thermal Infrared Images and Intensity Images of Point Cloud. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 809–815. [Google Scholar] [CrossRef]
- Zhai, Y.; Zeng, L. A SIFT Matching Algorithm Based on Adaptive Contrast Threshold. In Proceedings of the 2011 International Conference on Consumer Electronics, Communications and Networks (CECNet), XianNing, China, 16–18 April 2011; pp. 1934–1937. [Google Scholar] [CrossRef]
- Wang, W.; Hong, J.; Tang, Y.P. Image Matching for Geomorphic Measurement Based on SIFT and RANSAC Methods. In Proceedings of the 2008 International Conference on Computer Science and Software Engineering, Hubei, China, 12–14 December 2008; pp. 317–320. [Google Scholar] [CrossRef]
- Zhang, Y.H.; Jin, X.; Wang, Z.J. A New Modified Panoramic UAV Image Stitching Model Based on the GA-SIFT and Adaptive Threshold Method. Memetic Comput. 2017, 9, 231–244. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Sattler, T.; Leibe, B.; Kobbelt, L. SCRAMSAC: Improving RANSAC’s Efficiency with a Spatial Consistency Filter. In Proceedings of the 2009 IEEE 12th International Conference on Computer Vision (ICCV), Kyoto, Japan, 29 September–2 October 2009; pp. 2090–2097. [Google Scholar] [CrossRef]
- Bhattacharya, P.; Gavrilova, M. Improving RANSAC Feature Matching with Local Topological Information. In Proceedings of the 2012 Ninth International Symposium on Voronoi Diagrams in Science and Engineering (ISVD 2012), New Brunswick, NJ, USA, 27–29 June 2012; pp. 17–23. [Google Scholar] [CrossRef]
- Sebastian, B. Grey Level Co-Occurrence Matrices: Generalisation and Some New Features. Int. J. Comput. Sci. Eng. Inf. Technol. 2012, 2, 151–157. [Google Scholar] [CrossRef]
- Barrero, O.; Perdomo, S.A. RGB and Multispectral UAV Image Fusion for Gramineae Weed Detection in Rice Fields. Precis. Agric. 2018, 19, 809–822. [Google Scholar] [CrossRef]
- Yahyanejad, S.; Rinner, B. A Fast and Mobile System for Registration of Low-Altitude Visual and Thermal Aerial Images Using Multiple Small-Scale UAVs. ISPRS J. Photogramm. Remote Sens. 2015, 104, 189–202. [Google Scholar] [CrossRef]
- Yang, K.W.; Chen, T.H.; Xing, S.X.; Li, J.X. Infrared and Visible Image Registration Base on SIFT Features. Key Eng. Mater. 2012, 500, 383–389. [Google Scholar] [CrossRef]
- Rottensteiner, F.; Sohn, G.; Gerke, M.; Wegner, J.D. ISPRS Test Project on Urban Classification and 3D Building Reconstruction. Comm. III-Photogramm. Comput. Vis. Image Anal. Working Group III/4-3D Scene Anal. 2013, 1–17. [Google Scholar] [CrossRef]
- Verhoeven, G. Taking Computer Vision Aloft—Archaeological Three—Dimensional Reconstructions from Aerial Photographs with Photoscan. Archaeol. Prospect. 2011, 18, 67–73. [Google Scholar] [CrossRef]
- Lin, Y.; Medioni, G. Map-Enhanced UAV Image Sequence Registration and Synchronization of Multiple Image Sequences. In Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition, Minneapolis, MN, USA, 17–22 June 2007; pp. 1–7. [Google Scholar] [CrossRef]
- Chiabrando, F.; Donadio, E.; Rinaudo, F. SfM for Orthophoto to Generation: A Winning Approach for Cultural Heritage Knowledge. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 91–98. [Google Scholar] [CrossRef]
- Khan, M.M.; Hafiz, R.; Cho, Y.; Qureshi, H.S.; Cha, J. Quantitative Quality Assessment of Stitched Panoramic Images. IET Image Process. 2012, 6, 1348–1358. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image Quality Assessment: From Error Visibility to Structural Similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, Z.; Bovik, A.C.; Simoncelli, E.P. Structural Approaches to Image Quality Assessment. In Handbook of Image and Video Processing; Elsevier Inc.: Amsterdam, The Netherlands, 2005; pp. 961–974. [Google Scholar] [Green Version]
- Aniruddha Acharya, K.; Venkatesh Babu, R. Speeding up SIFT Using GPU. In Proceedings of the 2013 Fourth National Conference on Computer Vision, Pattern Recognition, Image Processing and Graphics (NCVPRIPG), Jodhpur, India, 18–21 December 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Mohammadi, M.S.; Rezaeian, M. Towards Affordable Computing: SiftCU a Simple but Elegant GPU-based Implementation of SIFT. Int. J. Comput. Appl. 2014, 90, 30–37. [Google Scholar] [CrossRef] [Green Version]
- Lv, G.; Wei, S.; Lu, G. Enhancing SIFT-Based Image Registration Performance by Building and Selecting Highly Discriminating Descriptors. Pattern Recognit. Lett. 2016, 84, 156–162. [Google Scholar] [CrossRef]
- Chen, Y.; Shang, L. Optik Improved SIFT Image Registration Algorithm on Characteristic Statistical Distributions and Consistency Constraint. Optik 2016, 127, 900–911. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, X.; Yuan, X.; Wang, S. An Improved SIFT Algorithm in the Application of Close-Range Stereo Image Matching. IOP Conf. Ser. Earth Environ. Sci. 2016, 46, 012009. [Google Scholar] [CrossRef]
- Saleem, S.; Bais, A.; Sablatnig, R. Towards Feature Points Based Image Matching between Satellite Imagery and Aerial Photographs of Agriculture Land. Comput. Electron. Agric. 2016, 126, 12–20. [Google Scholar] [CrossRef]
- Huang, Q.Q.; Yang, J.; Wang, C.Y.; Chen, J.B.; Meng, Y. Improved Registration Method for Infrared and Visible Remote Sensing Image Using NSCT and SIFT. In Proceedings of the Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012; Volume 2, pp. 2360–2363. [Google Scholar] [CrossRef]
- Hung, C.; Xu, Z.; Sukkarieh, S. Feature Learning Based Approach for Weed Classification Using High Resolution Aerial Images from a Digital Camera Mounted on a UAV. Remote Sens. 2014, 6, 12037–12054. [Google Scholar] [CrossRef] [Green Version]
- Dufournaud, Y.; Schmid, C.; Horaud, R. Image Matching with Scale Adjustment. Comput. Vis. Image Underst. 2004, 93, 175–194. [Google Scholar] [CrossRef]
- Li, X.; Aouf, N. SIFT and SURF Feature Analysis in Visible and Infrared Imaging for UAVs. In Proceedings of the 2012 IEEE 11th International Conference on Cybernetic Intelligent Systems (CIS), Limerick, Ireland, 23–24 August 2012; pp. 46–51. [Google Scholar] [CrossRef]
- Su, J.; Ai, M. Unmanned Airship Based Multiple Spectrum Image Mosaic with SIFT Feature Matching. In Proceedings of the 2011 International Workshop on Multi-Platform/Multi-Sensor Remote Sensing and Mapping, Xiamen, China, 10–12 January 2011; pp. 1–5. [Google Scholar] [CrossRef]
- Gómez-Candón, D.; Virlet, N.; Labbé, S.; Jolivot, A.; Regnard, J.L. Field Phenotyping of Water Stress at Tree Scale by UAV-Sensed Imagery: New Insights for Thermal Acquisition and Calibration. Precis. Agric. 2016, 17, 786–800. [Google Scholar] [CrossRef]
- Aulakh, M.S.; Wassmann, R.; Bueno, C.; Kreuzwieser, J.; Rennenberg, H. Characterization of Root Exudates at Different Growth Stages of Ten Rice (Oryza Sativa L.) Cultivars. Plant Biol. 2001, 3, 139–148. [Google Scholar] [CrossRef]
- Xu, J.P.; Peng, S.Z.; Zheng, W. Characteristics of Rice Leaf Photosynthetic Light Response Curve with Different Water and Nitrogen Regulation. Trans. Chin. Soc. Agric. Eng. 2012, 28, 72–76. [Google Scholar] [CrossRef]
- Shi, Y.; Thomasson, J.A.; Murray, S.C. Unmanned Aerial Vehicles for High-Throughput Phenotyping and Agronomic Research. PLoS ONE 2016, 11, 1–26. [Google Scholar] [CrossRef]
- Rojas, J.; Martinez, C.; Mondragon, I.; Colorado, J. Towards Image Mosaicking with Aerial Images for Monitoring Rice Crops. Adv. Autom. Robot. Res. Lat. Am. 2017, 13, 279–296. [Google Scholar] [CrossRef]
- Moussa, A.; Stitching, I.; Mosaicing, I.; Triangulation, C.D. A Fast Approach for Stitching of Aerial Images. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B3, 769–774. [Google Scholar] [CrossRef]
- Photo Stitching Vs. Orthomosaic Generation. Available online: https://support.pix4d.com/hc/en-us/articles/202558869-Photo-stitching-vs-orthomosaic-generation (accessed on 30 March 2019).
- Cai, J.; Kumar, P.; Chopin, J.; Miklavcic, S.J. Land-Based Crop Phenotyping by Image Analysis: Accurate Estimation of Canopy Height Distributions Using Stereo Images. PLoS ONE 2018, 13, e0196671. [Google Scholar] [CrossRef] [PubMed]
- Sankaran, S.; Khot, L.R.; Espinoza, C.Z.; Jarolmasjed, S.; Sathuvalli, V.R.; Vandemark, G.J.; Miklas, P.N.; Carter, A.H.; Pumphrey, M.O.; Knowles, N.R.; et al. Low-Altitude, High-Resolution Aerial Imaging Systems for Row and Field Crop Phenotyping: A Review. Eur. J. Agron. 2015, 70, 112–123. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Category | Sensor | Resolution (pixels) | Phenology | Region | Area (ha) | Crop |
|---|---|---|---|---|---|---|---|
| 1 | VI | ZENMUSE X4S | 4864 × 3078 | Jointing | I | 0.36 | Wheat |
| 2 | VI | ZENMUSE X4S | 4864 × 3078 | Jointing | II | 0.38 | Rice |
| 3 | VI | ZENMUSE X4S | 4864 × 3078 | Maturity | II | 0.38 | Rice |
| 4 | TIR | ZENMUSE XT | 640 × 512 | Jointing | I | 0.36 | Wheat |
| 5 | TIR | ZENMUSE XT | 640 × 512 | Jointing | II | 0.38 | Rice |
| 6 | TIR | ZENMUSE XT | 640 × 512 | Maturity | II | 0.38 | Rice |
| 7 | NIR | RedEdge M | 1280 × 960 | Jointing | II | 0.38 | Rice |
| 8 | NIR | RedEdge M | 1280 × 960 | Maturity | II | 0.38 | Rice |
| Dataset | Category | Method | Number of Images | T (s) | SSIM |
|---|---|---|---|---|---|
| 1 | VI | SSIFT | 8 | 2629 | 0.889 |
| Proposed method | 8 | 1719 | 0.913 | ||
| PS | 8 | 2060 | 0.873 | ||
| 2 | VI | SSIFT | 9 | 3146 | 0.909 |
| Proposed method | 9 | 1952 | 0.921 | ||
| PS | 9 | 2200 | 0.902 | ||
| 3 | VI | SSIFT | 9 | 3897 | 0.906 |
| Proposed method | 9 | 2060 | 0.915 | ||
| PS | 9 | 2330 | 0.901 | ||
| 4 | TIR | SSIFT | 12 | -* | - |
| Proposed method | 12 | 35 | 0.896 | ||
| PS | 12 | - | - | ||
| 5 | TIR | SSIFT | 10 | - | - |
| Proposed method | 10 | 19 | 0.898 | ||
| PS | 10 | - | - | ||
| 6 | TIR | SSIFT | 10 | - | - |
| Proposed method | 10 | 17 | 0.907 | ||
| PS | 10 | - | - | ||
| 7 | NIR | SSIFT | 9 | 64.92 | 0.834 |
| Proposed method | 9 | 45.18 | 0.887 | ||
| PS | 9 | 60 | 0.782 | ||
| 8 | NIR | SSIFT | 9 | 73.23 | 0.830 |
| Proposed method | 9 | 56.18 | 0.889 | ||
| PS | 9 | 63 | 0.812 |
| Dataset | Number of Images | Number of Tie Points | Number of Extracted Points | Ground Resolution (cm/pixel) |
|---|---|---|---|---|
| 1 | 8 | 11,596 | 12,793 | 1.4 |
| 2 | 9 | 11,830 | 12,291 | 1.4 |
| 3 | 9 | 14,879 | 15,189 | 1.4 |
| 4 | 12 | 1402 | 1690 | 18.1 |
| 5 | 10 | 1377 | 1622 | 18.1 |
| 6 | 10 | 1763 | 1891 | 18.1 |
| 7 | 9 | 5457 | 6562 | 3.4 |
| 8 | 9 | 9556 | 10,261 | 3.4 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Zhang, X.; Gao, C.; Qiu, X.; Tian, Y.; Zhu, Y.; Cao, W. Rapid Mosaicking of Unmanned Aerial Vehicle (UAV) Images for Crop Growth Monitoring Using the SIFT Algorithm. Remote Sens. 2019, 11, 1226. https://doi.org/10.3390/rs11101226
Zhao J, Zhang X, Gao C, Qiu X, Tian Y, Zhu Y, Cao W. Rapid Mosaicking of Unmanned Aerial Vehicle (UAV) Images for Crop Growth Monitoring Using the SIFT Algorithm. Remote Sensing. 2019; 11(10):1226. https://doi.org/10.3390/rs11101226
Chicago/Turabian StyleZhao, Jianqing, Xiaohu Zhang, Chenxi Gao, Xiaolei Qiu, Yongchao Tian, Yan Zhu, and Weixing Cao. 2019. "Rapid Mosaicking of Unmanned Aerial Vehicle (UAV) Images for Crop Growth Monitoring Using the SIFT Algorithm" Remote Sensing 11, no. 10: 1226. https://doi.org/10.3390/rs11101226
APA StyleZhao, J., Zhang, X., Gao, C., Qiu, X., Tian, Y., Zhu, Y., & Cao, W. (2019). Rapid Mosaicking of Unmanned Aerial Vehicle (UAV) Images for Crop Growth Monitoring Using the SIFT Algorithm. Remote Sensing, 11(10), 1226. https://doi.org/10.3390/rs11101226