Winter Wheat Canopy Height Extraction from UAV-Based Point Cloud Data with a Moving Cuboid Filter


Abstract
:
1. Introduction
2. Materials and Methods
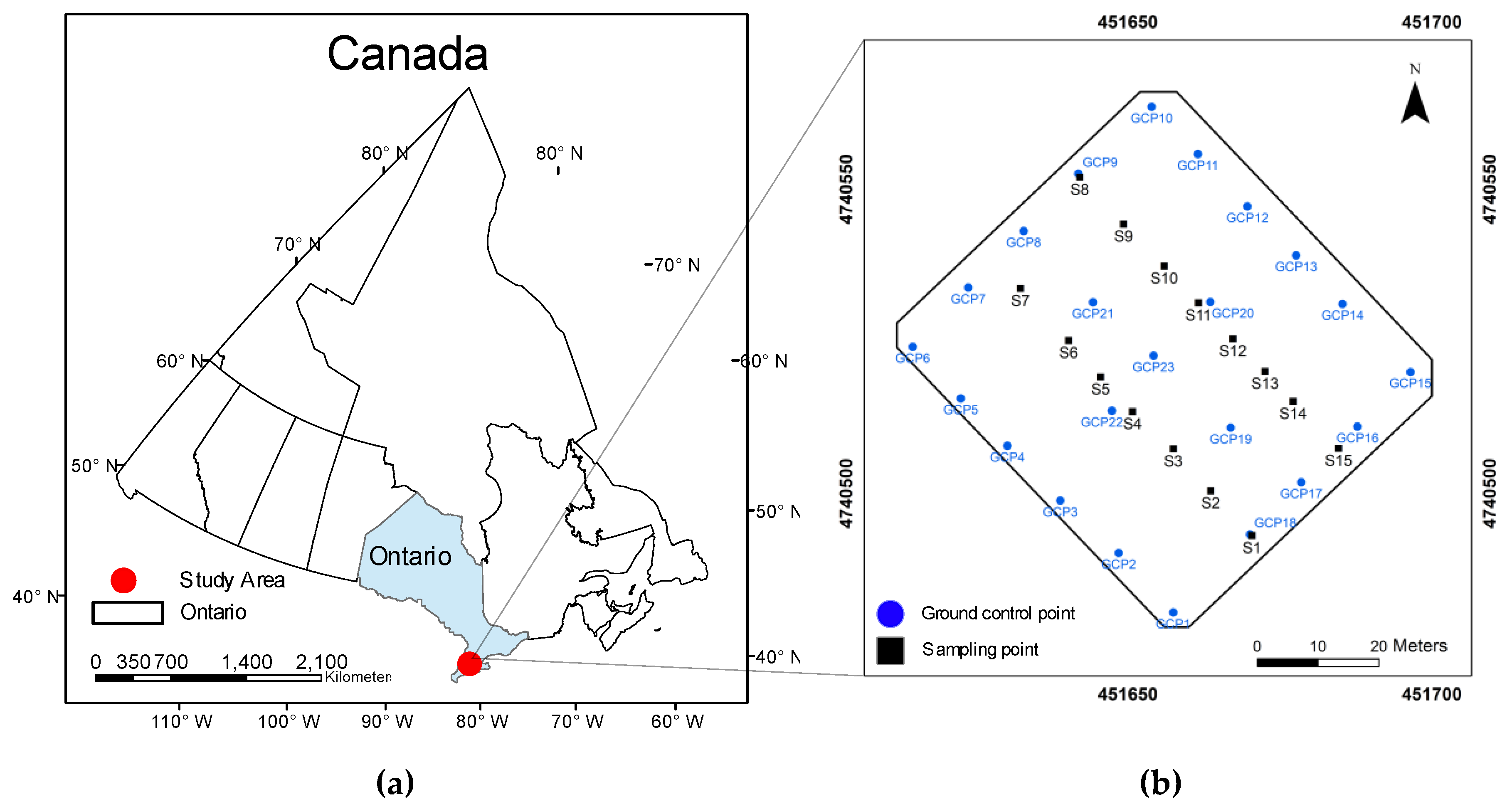
2.1. Site Description and Ground-Based Data Collection
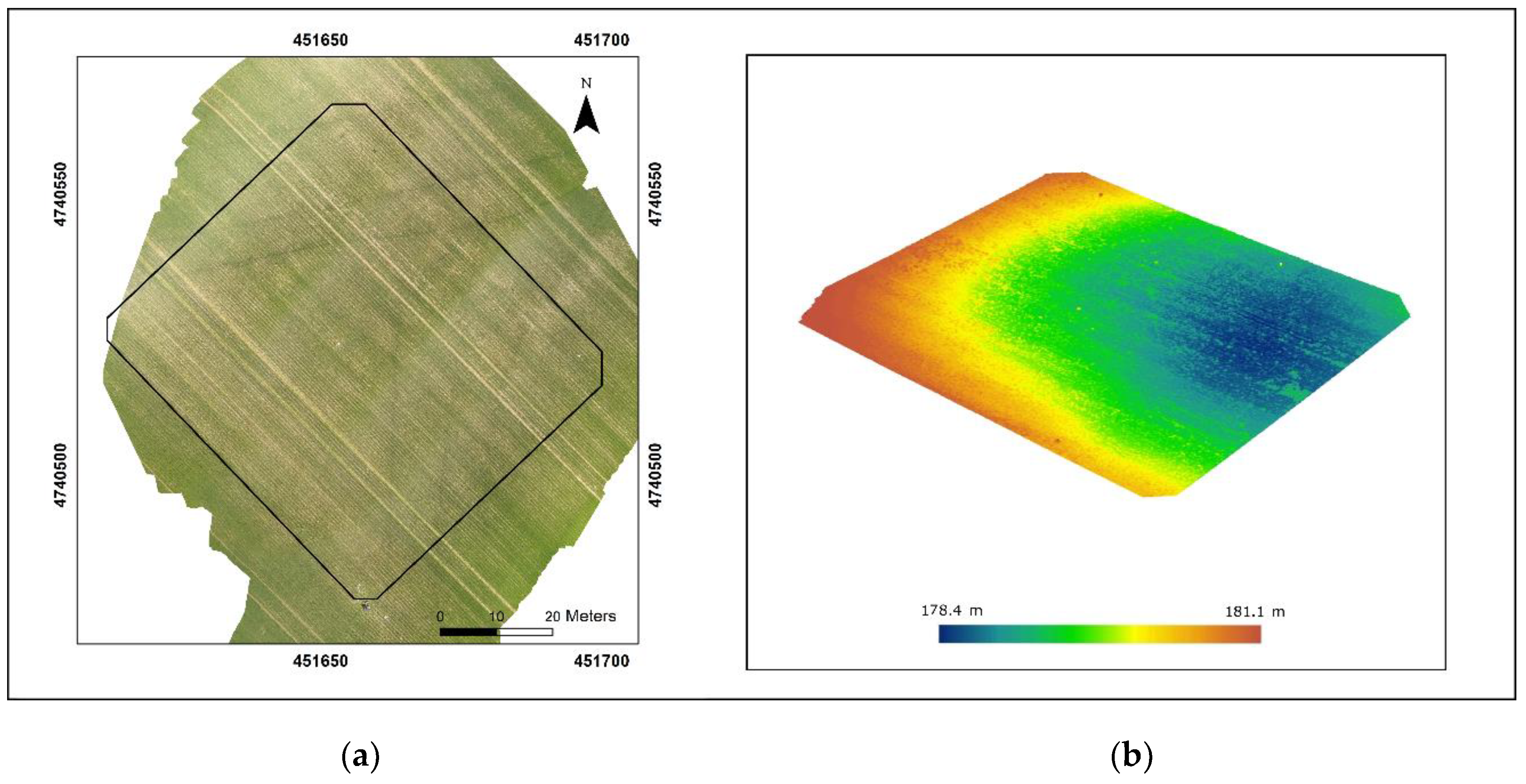
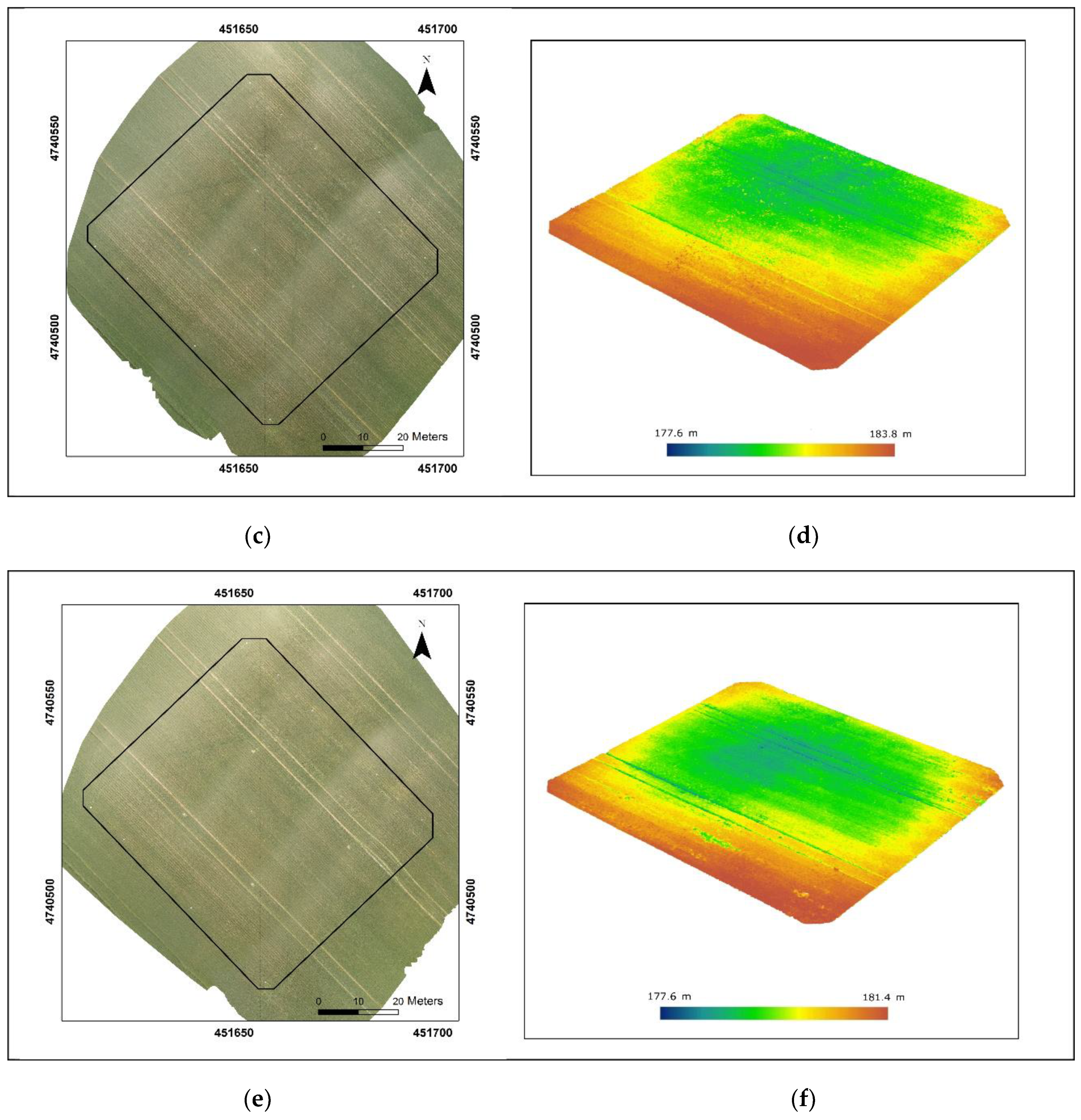
2.2. Remote Sensing Data Acquisition and Preprocessing
2.3. Data Analysis
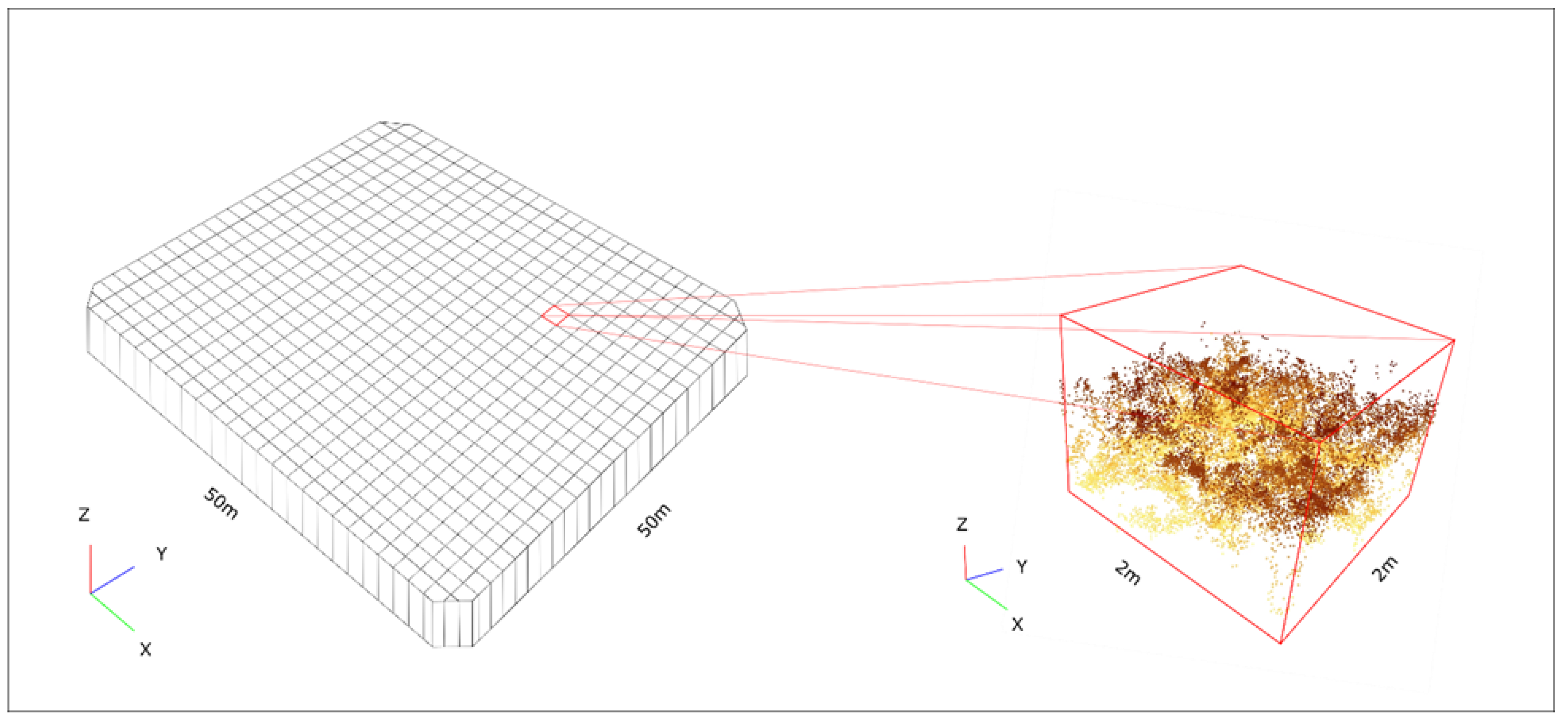
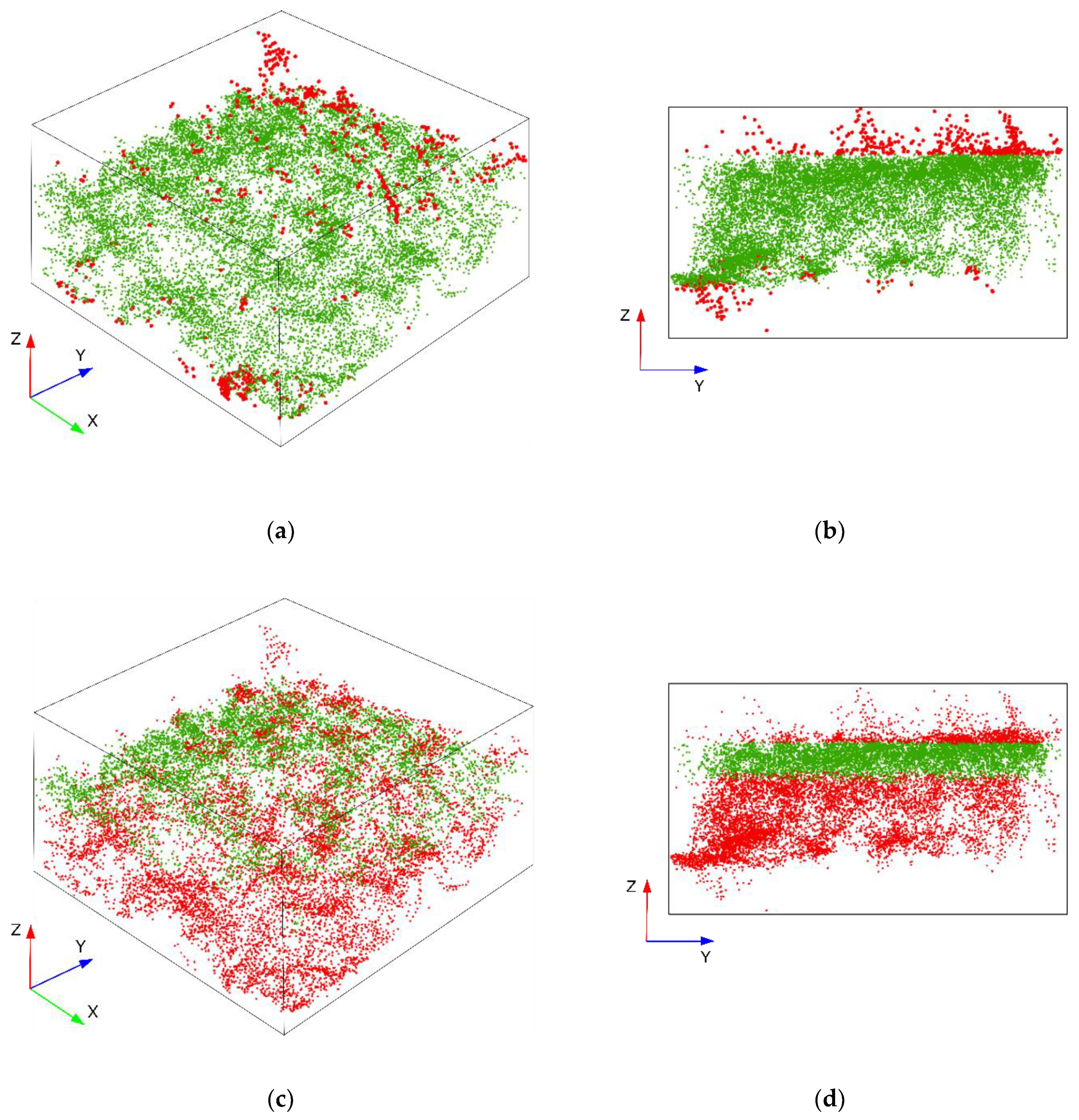
2.3.1. UAV-Based Point Cloud Distribution over Crop Fields
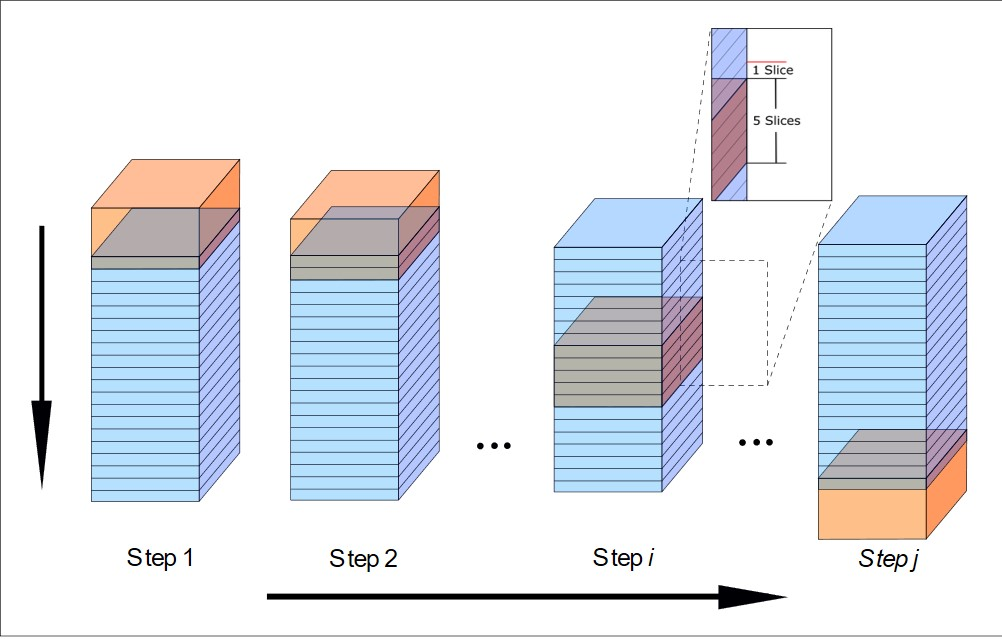
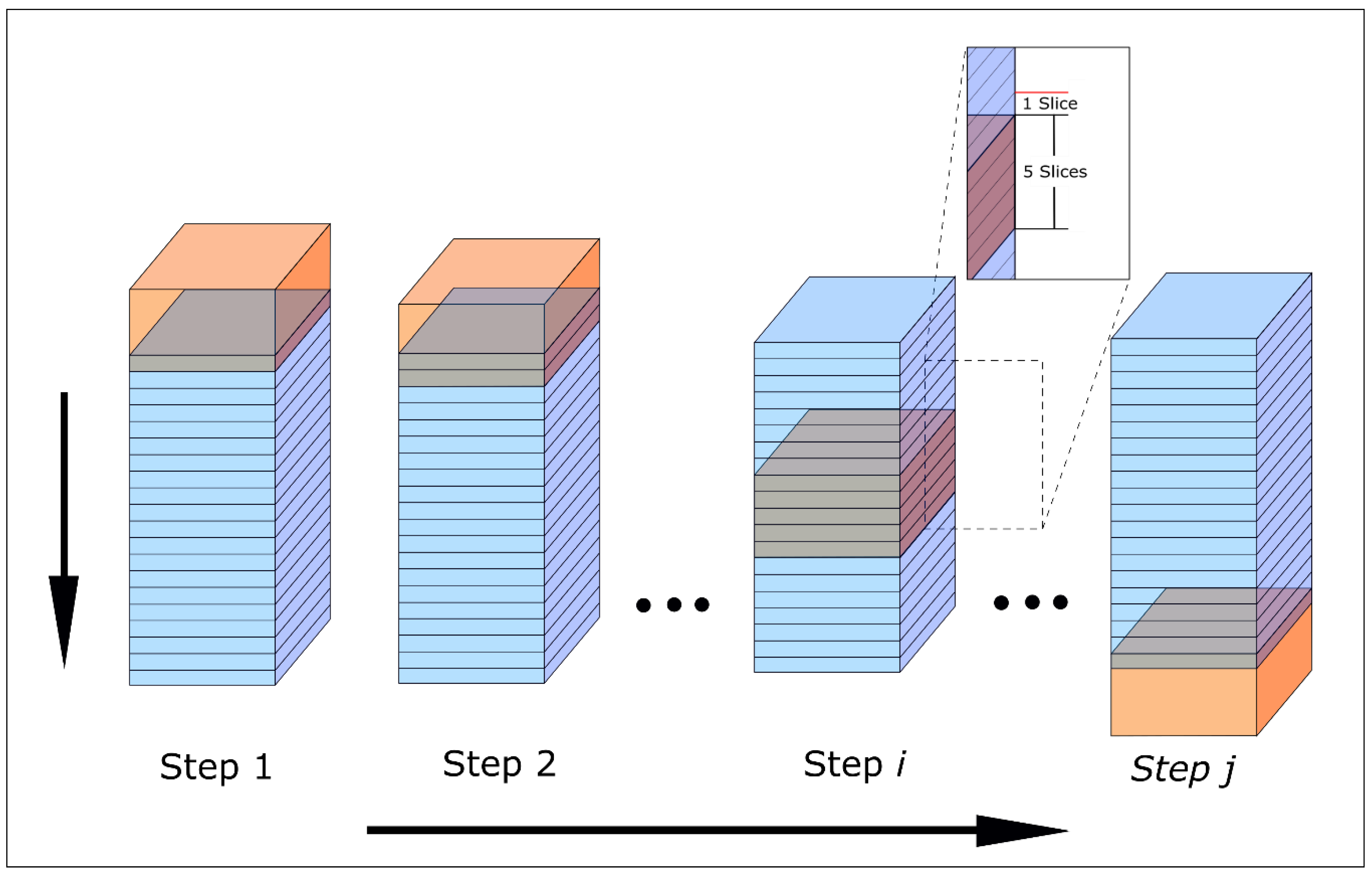
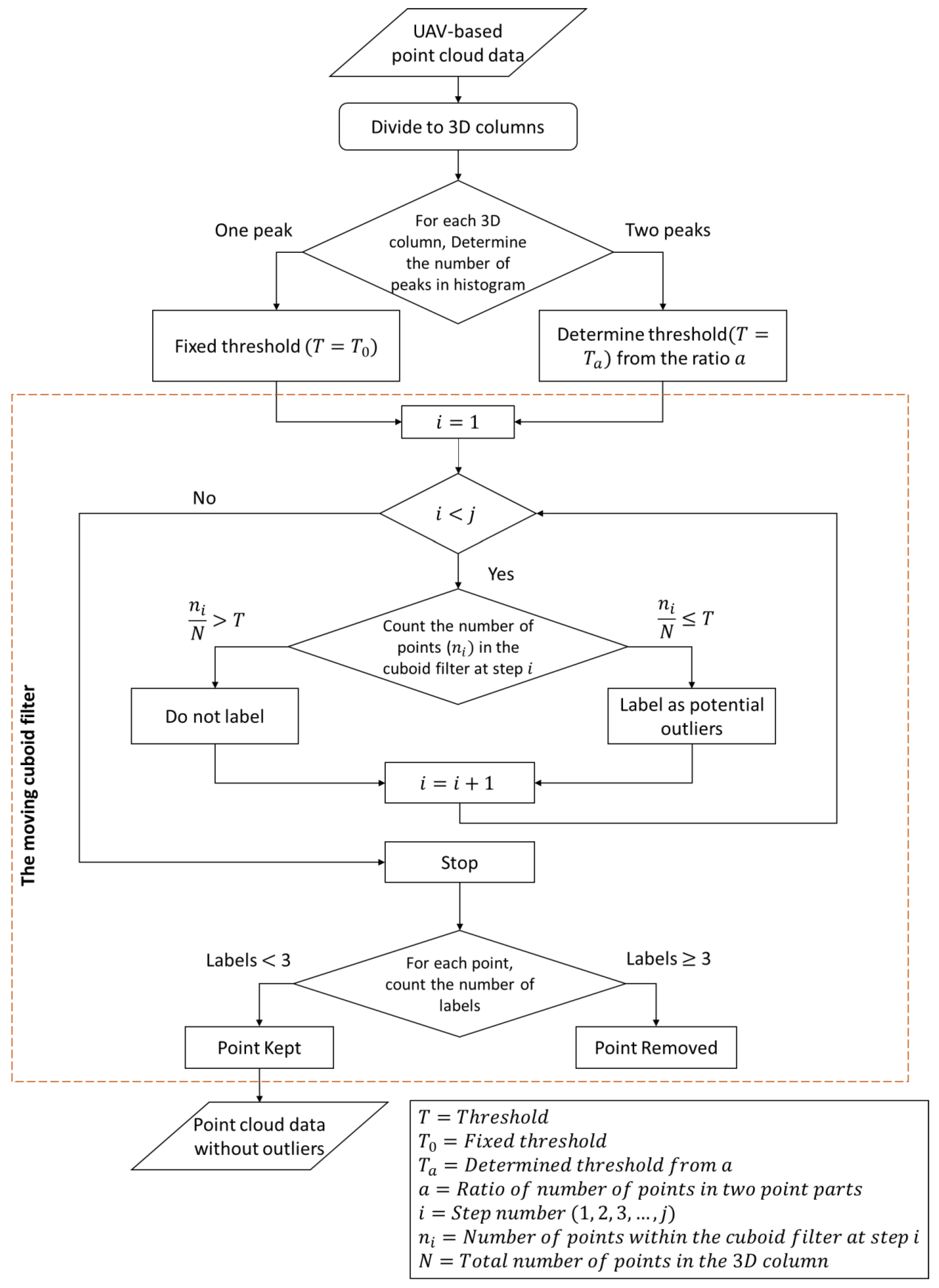
2.3.2. The Moving Cuboid Filter
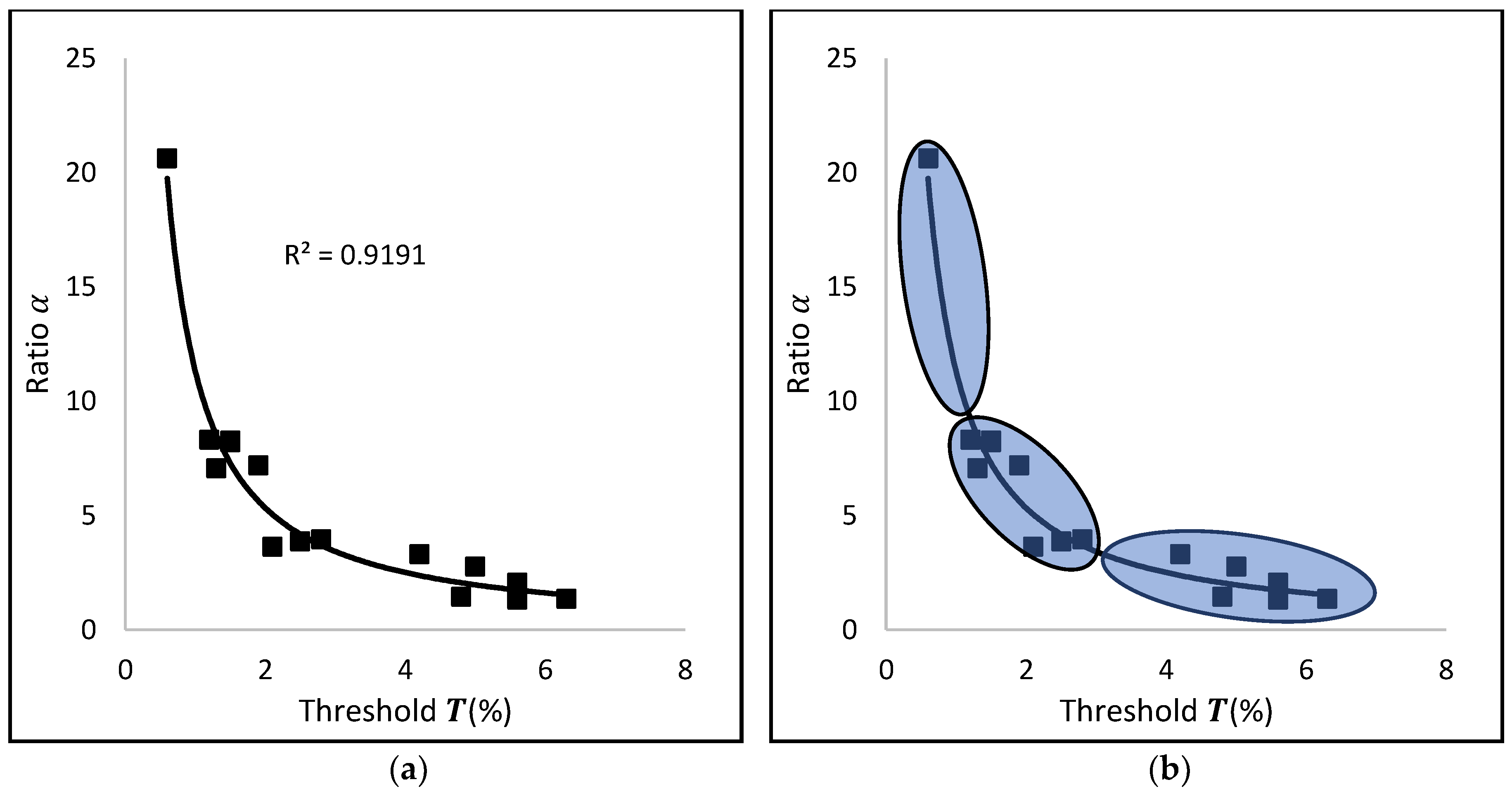
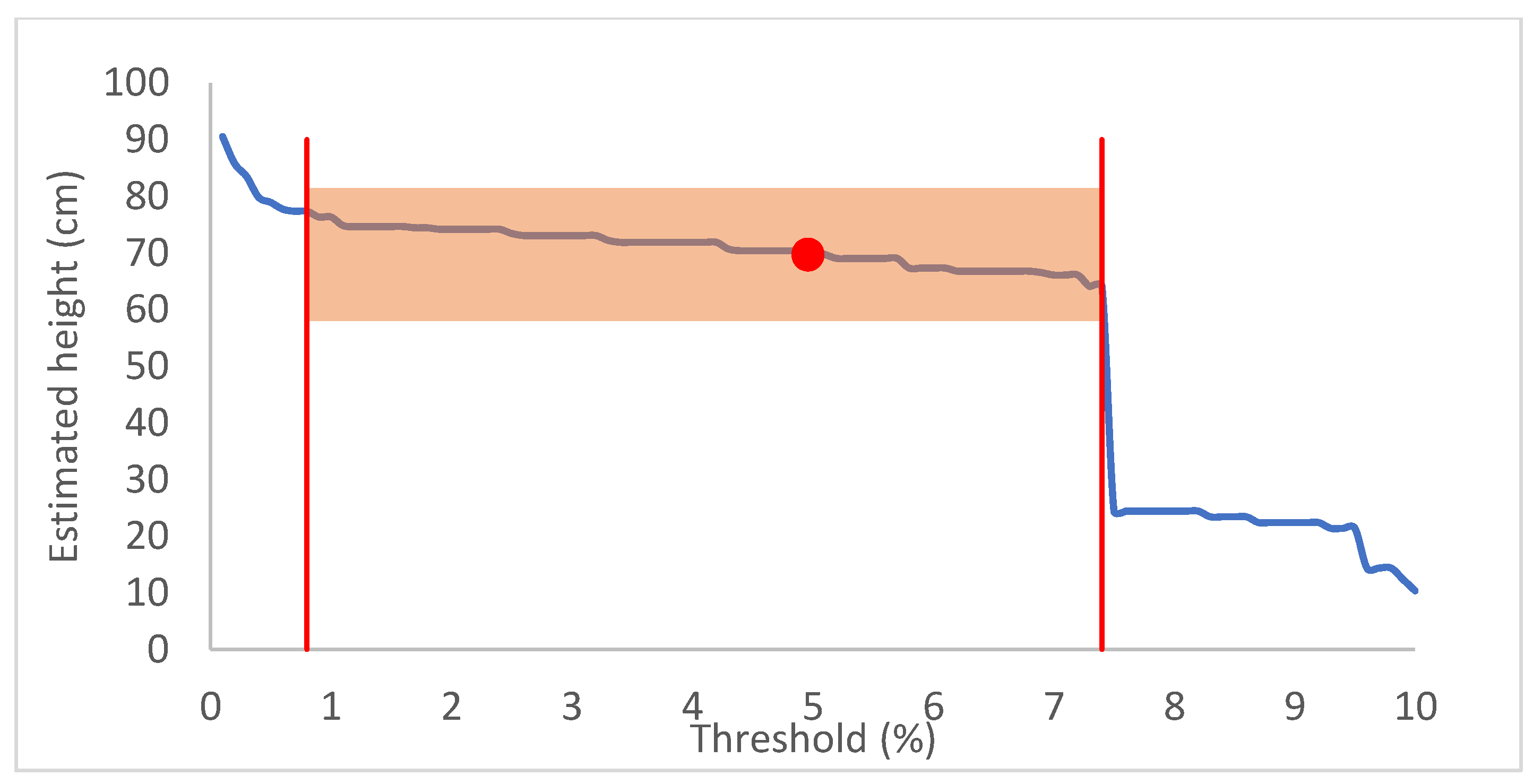
2.3.3. Threshold Determination
2.3.4. Method Assessment
3. Results
3.1. Threshold T and Range of α for Winter Wheat
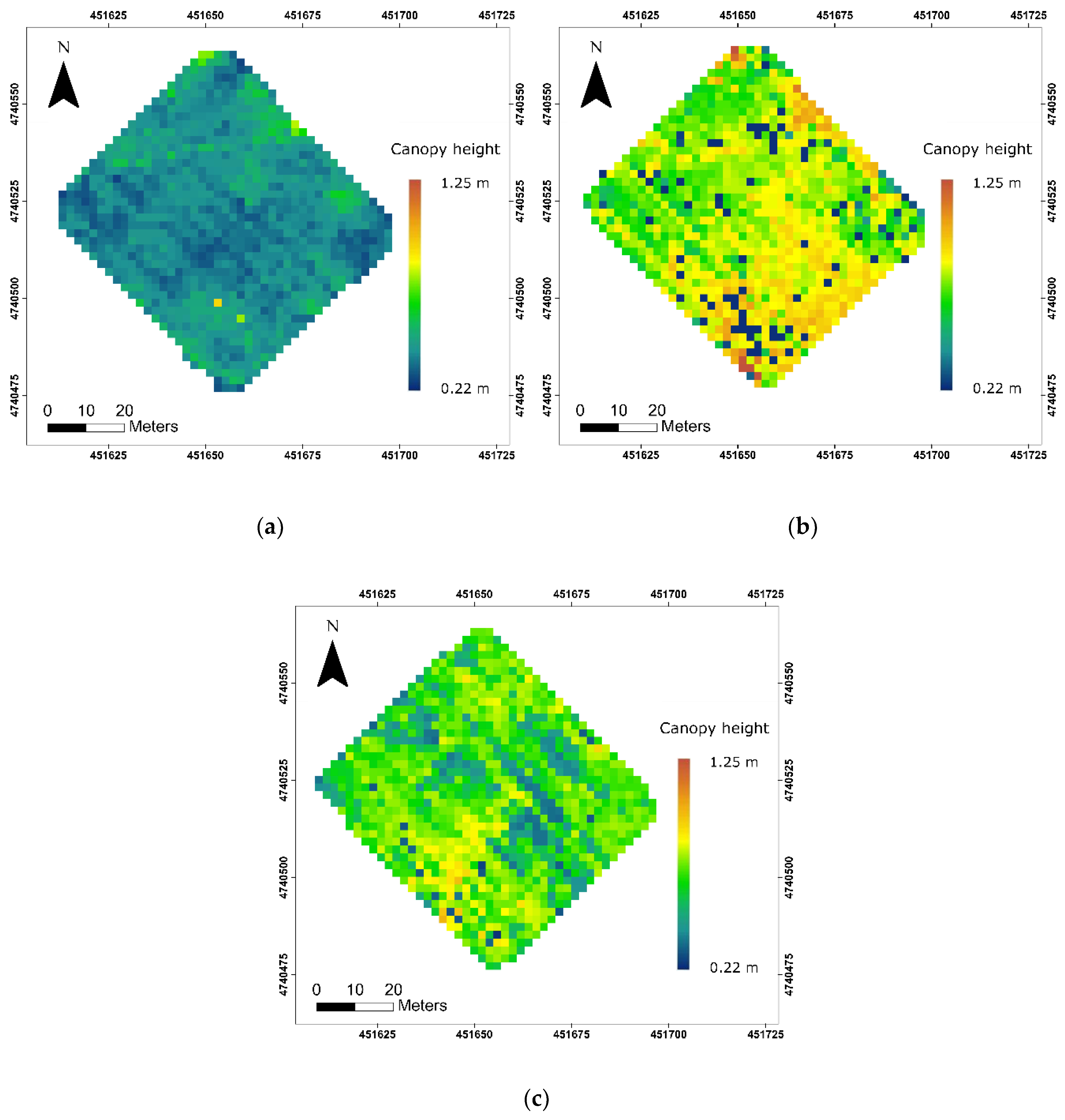
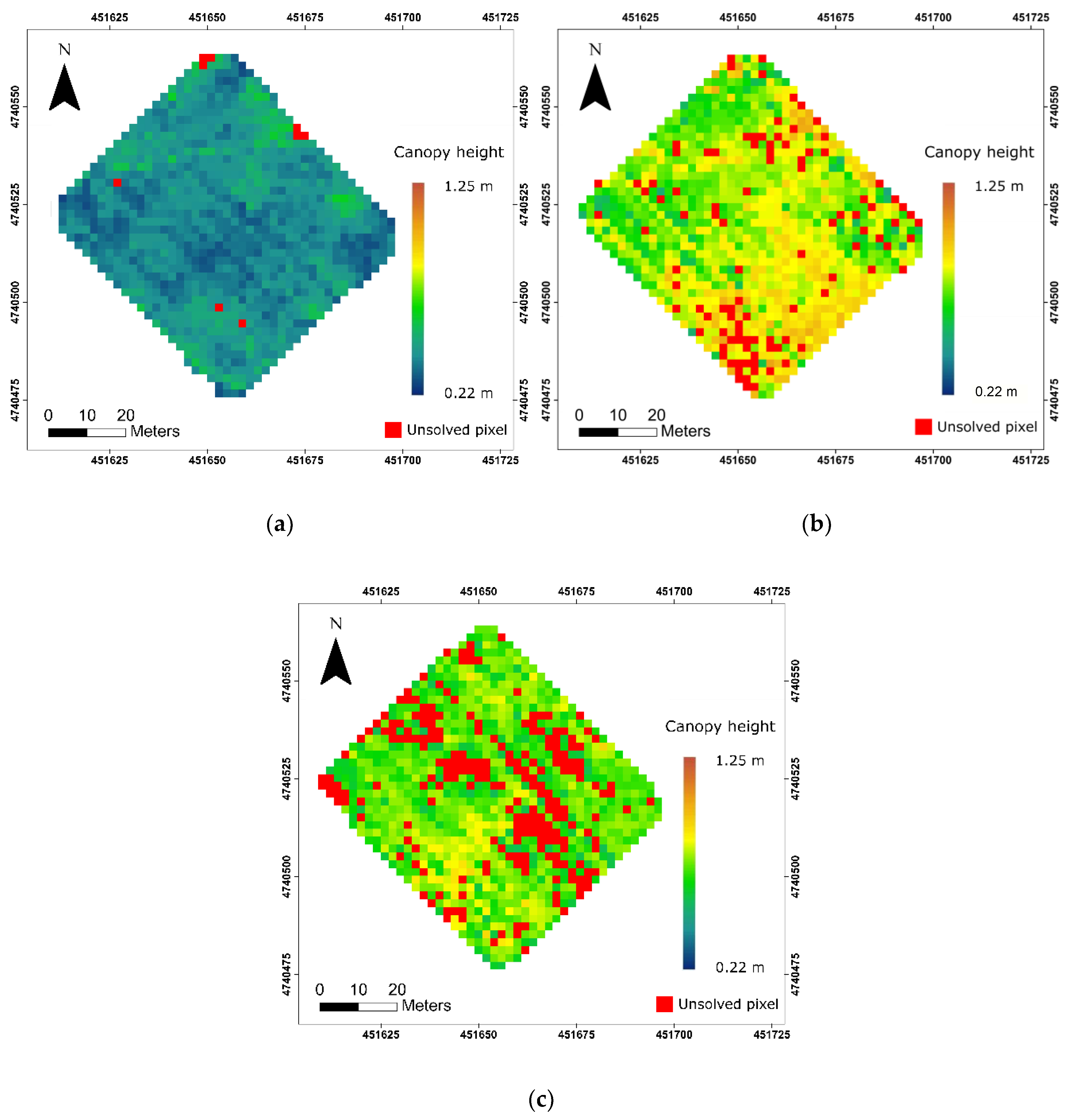
3.2. Canopy Height Estimation at Different Growth Stages Using the Moving Cuboid Filter
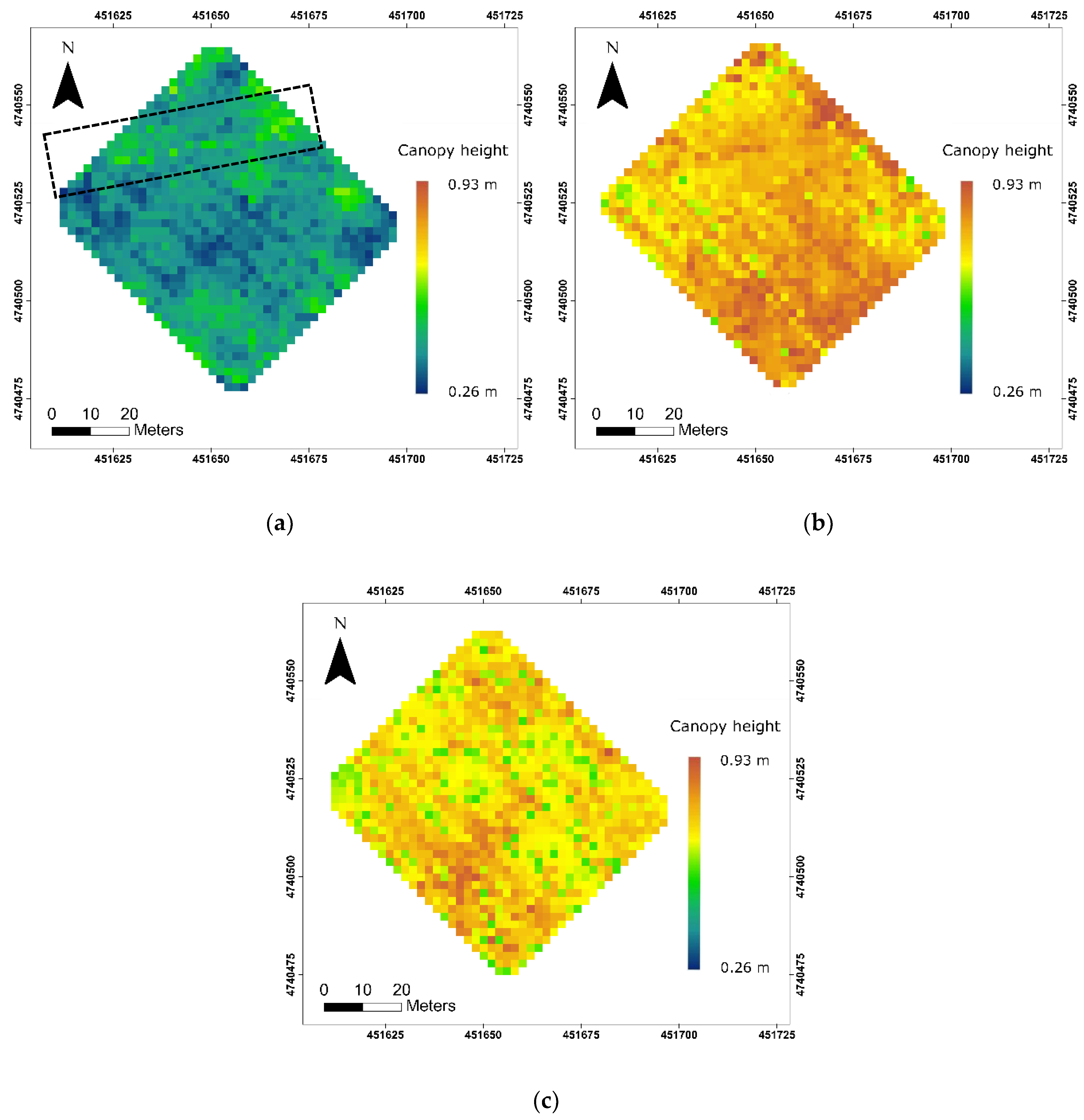
3.3. Canopy Height Maps after Interpolating for Unsolved Pixels
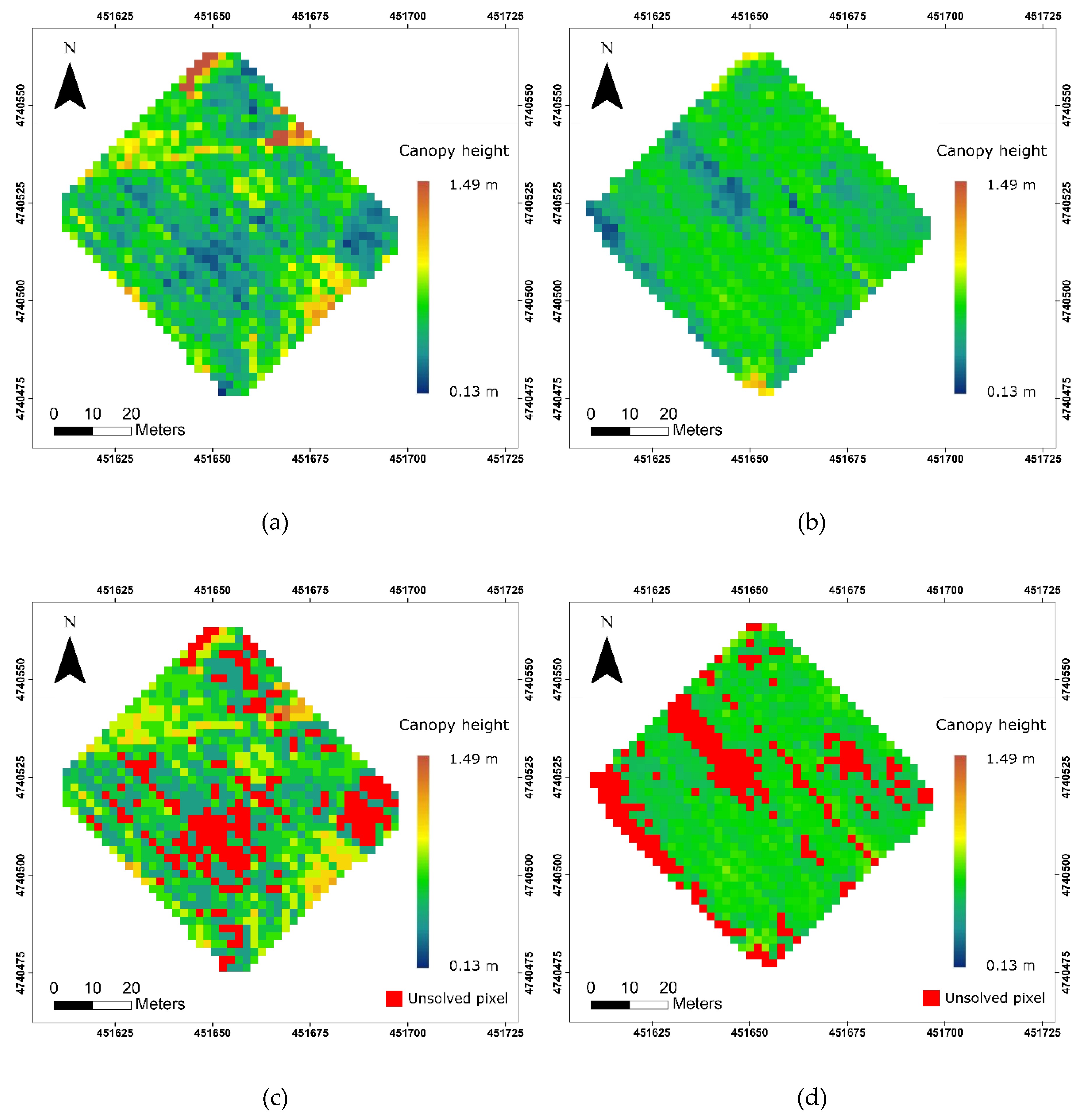
3.4. Canopy Height Results Using the Point Statistical Method Developed by Khanna
4. Discussion
4.1. Advantages of the Moving Cuboid Filter
4.2. Limitations and Uncertainties of the Moving Cuboid Filter
4.3. Applications of the Moving Cuboid Filter
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Freeman, P.K.; Freeland, R.S. Agricultural UAVs in the U.S.: Potential, policy, and hype. Remote Sens. Appl. Soc. Environ. 2015, 2, 35–43. [Google Scholar] [CrossRef]
- Primicerio, J.; Di Gennaro, S.F.; Fiorillo, E.; Genesio, L.; Lugato, E.; Matese, A.; Vaccari, F.P. A flexible unmanned aerial vehicle for precision agriculture. Precis. Agric. 2012, 13, 517–523. [Google Scholar] [CrossRef]
- Park, S.; Ryu, D.; Fuentes, S.; Chung, H.; Hern, E.; Connell, M.O. Adaptive Estimation of Crop Water Stress in Nectarine and Peach Orchards Using High-Resolution Imagery from an Unmanned Aerial Vehicle (UAV). Remote Sens. 2017, 9, 828. [Google Scholar] [CrossRef]
- Swain, K.C.; Thomson, S.J.; Jayasurya, H.P.W. Adoption of an unmanned helicopter for low-altitude remote sensing to estimate yield and total biomass of a rice crop. Trans. ASAE 2010, 53, 21–27. [Google Scholar] [CrossRef]
- Lottes, P.; Khanna, R.; Pfeifer, J.; Siegwart, R.; Stachniss, C. UAV-Based Crop and Weed Classification for Smart Farming. Available online: http://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/lottes17icra.pdf (accessed on 24 May 2019).
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Nebiker, S.; Annen, A.; Scherrer, M.; Oesch, D. A light-weight multispectral sensor for micro uav–opportunities for very high resolution airborne remote sensing. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, XXXVII, 1193–1200. [Google Scholar]
- Huang, J.; Wang, X.; Li, X.; Tian, H.; Pan, Z. Remotely Sensed Rice Yield Prediction Using Multi-Temporal NDVI Data Derived from NOAA’s-AVHRR. PLoS ONE 2013, 8, 1–13. [Google Scholar] [CrossRef] [PubMed]
- D’Oleire-Oltmanns, S.; Marzolff, I.; Peter, K.D.; Ries, J.B. Unmanned Aerial Vehicle (UAV) for Monitoring Soil Erosion in Morocco. Remote Sens. 2012, 4, 3390–3416. [Google Scholar] [CrossRef] [Green Version]
- Hunt, E.R.; Dean Hively, W.; Fujikawa, S.J.; Linden, D.S.; Daughtry, C.S.T.; McCarty, G.W. Acquisition of NIR-green-blue digital photographs from unmanned aircraft for crop monitoring. Remote Sens. 2010, 2, 290–305. [Google Scholar] [CrossRef]
- Kalisperakis, I.; Stentoumis, C.; Grammatikopoulos, L.; Karantzalos, K. Leaf Area Index Estimation in Vineyards From Uav Hyperspectral Data, 2D Image Mosaics and 3D Canopy Surface Models. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-1/W4, 299–303. [Google Scholar] [CrossRef]
- Hoffmann, H.; Jensen, R.; Thomsen, A.; Nieto, H.; Rasmussen, J.; Friborg, T. Crop water stress maps for entire growing seasons from visible and thermal UAV imagery. Biogeosciences 2016, 1–30. [Google Scholar] [CrossRef]
- Schirrmann, M.; Hamdorf, A.; Garz, A.; Ustyuzhanin, A.; Dammer, K. Estimating wheat biomass by combining image clustering with crop height. Comput. Electron. Agric. 2016, 121, 374–384. [Google Scholar] [CrossRef]
- Agüera, F.; Carvajal, F.; Pérez, M. Measuring Sunflower Nitrogen Status From an Unmanned Aerial Vehicle-Based System and an on the Ground Device. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXVIII-1/C22, 33–37. [Google Scholar] [CrossRef]
- Kolejka, J.; Plánka, L. Technical Report: The Development and Experience with UAV Research Applications in Former Czechoslovakia (1960s–1990s). Pure Appl. Geophys. 2018. [Google Scholar] [CrossRef]
- Yin, X.; Mcclure, M.A.; Jaja, N.; Tyler, D.D.; Hayes, R.M. In-Season Prediction of Corn Yield Using Plant Height under Major Production Systems. Agron. J. 2011, 103, 923–929. [Google Scholar] [CrossRef]
- Shaker, I.F.; Abd-Elrahman, A.; Abdel-Gawad, A.K.; Sherief, M.A. Building extraction from high resolution space images in high density residential areas in the Great Cairo region. Remote Sens. 2011, 3, 781–791. [Google Scholar] [CrossRef]
- Lagomasino, D.; Fatoyinbo, T.; Lee, S.K.; Simard, M. High-resolution forest canopy height estimation in an African blue carbon ecosystem. Remote Sens. Ecol. Conserv. 2015, 1, 51–60. [Google Scholar] [CrossRef]
- Li, W.; Niu, Z.; Chen, H.; Li, D.; Wu, M.; Zhao, W. Remote estimation of canopy height and aboveground biomass of maize using high-resolution stereo images from a low-cost unmanned aerial vehicle system. Ecol. Indic. 2016, 67, 637–648. [Google Scholar] [CrossRef]
- Zhang, L.; Grift, T.E. A LIDAR-based crop height measurement system for Miscanthus giganteus. Comput. Electron. Agric. 2012, 85, 70–76. [Google Scholar] [CrossRef]
- Hoffmeister, D.; Waldhoff, G.; Korres, W.; Curdt, C.; Bareth, G. Crop height variability detection in a single field by multi-temporal terrestrial laser scanning. Precis. Agric. 2016, 17, 296–312. [Google Scholar] [CrossRef]
- Hämmerle, M.; Höfle, B. Direct derivation of maize plant and crop height from low-cost time-of-flight camera measurements. Plant Methods 2016, 1–13. [Google Scholar] [CrossRef]
- Dal Mutto, C.; Zanuttigh, P.; Cortelazzo, G.M. Time-of-Flight Cameras and Microsoft KinectTM; Springer Briefs in Electrical and Computer Engineering; Springer: Boston, MA, USA, 2012; ISBN 978-1-4614-3806-9. [Google Scholar]
- Ryan, J.C.; Hubbard, A.L.; Box, J.E.; Todd, J.; Christoffersen, P.; Carr, J.R.; Holt, T.O.; Snooke, N. UAV photogrammetry and structure from motion to assess calving dynamics at Store Glacier, a large outlet draining the Greenland ice sheet. Cryosphere 2015, 9, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Smith, M.W.; Carrivick, J.L.; Quincey, D.J. Structure from motion photogrammetry in physical geography. Prog. Phys. Geogr. 2015, 40, 247–275. [Google Scholar] [CrossRef]
- Carrivick, J.L.; Smith, M.W.; Quincey, D.J. Structure from Motion in the Geosciences; John Wiley & Sons, Ltd.: Chichester, UK, 2016; ISBN 1118895827. [Google Scholar]
- Mlambo, R.; Woodhouse, I.H.; Gerard, F.; Anderson, K. Structure from motion (SfM) photogrammetry with drone data: A low cost method for monitoring greenhouse gas emissions from forests in developing countries. Forests 2017, 8, 68. [Google Scholar] [CrossRef]
- Harwin, S.; Lucieer, A. An Accuracy Assessment of Georeferenced Point Clouds Produced Via Multi-View Stereo Techniques Applied To Imagery Acquired Via Unmanned Aerial Vehicle. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXIX-B7, 475–480. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications Introduction. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Khanna, R.; Martin, M.; Pfeifer, J.; Liebisch, F.; Walter, A.; Siegwart, R. Beyond Point Clouds—3D Mapping and Field Parameter Measurements using UAVs. In Proceedings of the IEEE 20th Conference on Emerging Technologies & Factory Automation, Luxembourg City, Luxembourg, 8–11 September 2015; pp. 5–8. [Google Scholar]
- Grenzdörffer, G.J. Crop height determination with UAS point clouds. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS Archives, Denver, CO, USA, 17–20 November 2014; pp. 135–140. [Google Scholar]
- Anthony, D.; Elbaum, S.; Lorenz, A.; Detweiler, C. On crop height estimation with UAVs. IEEE Int. Conf. Intell. Robot. Syst. 2014, 4805–4812. [Google Scholar] [CrossRef] [Green Version]
- Bendig, J.; Bolten, A.; Bennertz, S.; Broscheit, J.; Eichfuss, S.; Bareth, G. Estimating biomass of barley using crop surface models (CSMs) derived from UAV-based RGB imaging. Remote Sens. 2014, 6, 10395–10412. [Google Scholar] [CrossRef]
- Brocks, S.; Bendig, J.; Bareth, G. Toward an automated low-cost three-dimensional crop surface monitoring system using oblique stereo imagery from consumer-grade smart cameras. J. Appl. Remote Sens. 2016, 10, 046021. [Google Scholar] [CrossRef] [Green Version]
- Ota, T.; Ogawa, M.; Shimizu, K.; Kajisa, T.; Mizoue, N.; Yoshida, S.; Takao, G.; Hirata, Y.; Furuya, N.; Sano, T.; et al. Aboveground Biomass Estimation Using Structure from Motion Approach with Aerial Photographs in a Seasonal Tropical Forest. Forests 2015, 6, 3882–3898. [Google Scholar] [CrossRef] [Green Version]
- Gil-Docampo, M.L.; Arza-García, M.; Ortiz-Sanz, J.; Martínez-Rodríguez, S.; Marcos-Robles, J.L.; Sánchez-Sastre, L.F. Above-ground biomass estimation of arable crops using UAV-based SfM photogrammetry. Geocarto. Int. 2019, 0, 1–13. [Google Scholar] [CrossRef]
- Chang, A.; Jung, J.; Maeda, M.M.; Landivar, J. Crop height monitoring with digital imagery from Unmanned Aerial System (UAS). Comput. Electron. Agric. 2017, 141, 232–237. [Google Scholar] [CrossRef]
- Chu, T.; Starek, M.J.; Brewer, M.J.; Murray, S.C.; Pruter, L.S. Characterizing canopy height with UAS structure-from-motion photogrammetry—Results analysis of a maize field trial with respect to multiple factors. Remote Sens. Lett. 2018, 9, 753–762. [Google Scholar] [CrossRef]
- Birdal, A.C.; Avdan, U.; Türk, T. Estimating tree heights with images from an unmanned aerial vehicle. Geomat. Nat. Hazards Risk 2017, 8, 1144–1156. [Google Scholar] [CrossRef] [Green Version]
- Wolff, K.; Kim, C.; Zimmer, H.; Schroers, C.; Botsch, M.; Sorkine-Hornung, O.; Sorkine-Hornung, A. Point Cloud Noise and Outlier Removal for Image-Based 3D Reconstruction. In Proceedings of the 2016 Fourth International Conference on 3D Vision (3DV), Stanford, CA, USA, 25–28 October 2016; pp. 118–127. [Google Scholar]
- Yilmaz, C.S.; Yilmaz, V.; Gungor, O. Ground Filtering of a UAV-based Point cloud with the Cloth Simulation Filtering Algorithm. In Proceedings of the International Conference on Advances and Innovations in Engineering (ICAIE), Elazig, Turkey, 10–12 May 2017; pp. 627–630. [Google Scholar]
- Chen, S.; Truong-hong, L.; Keeffe, E.O.; Laefer, D.F.; Mangina, E. Outlier Detection of Point Clouds Generating from Low Cost UAVs for Bridge Inspection. Available online: https://www.researchgate.net/publication/328769516_Outlier_detection_of_point_clouds_generating_from_low-cost_UAVs_for_bridge_inspection (accessed on 24 May 2019).
- Zeybek, M.; Şanlıoğlu, İ. Point cloud filtering on UAV based point cloud. Meas. J. Int. Meas. Confed. 2019, 133, 99–111. [Google Scholar] [CrossRef]
- Christian Rose, J.; Paulus, S.; Kuhlmann, H. Accuracy analysis of a multi-view stereo approach for phenotyping of tomato plants at the organ level. Sensors 2015, 15, 9651–9665. [Google Scholar] [CrossRef]
- Zainuddin, K.; Jaffri, M.H.; Zainal, M.Z.; Ghazali, N.; Samad, A.M. Verification test on ability to use low-cost UAV for quantifying tree height. In Proceedings of the 2016 IEEE 12th Int Colloq Signal Process its Appl CSPA Melaka, Malacca City, Malaysia, 4–6 March 2016; pp. 317–321. [Google Scholar]
- Fraser, R.H.; Olthof, I.; Lantz, T.C.; Schmitt, C. UAV photogrammetry for mapping vegetation in the low-Arctic. Arct. Sci. 2016, 2, 79–102. [Google Scholar] [CrossRef] [Green Version]
- Shin, P.; Sankey, T.; Moore, M.M.; Thode, A.E. Evaluating unmanned aerial vehicle images for estimating forest canopy fuels in a ponderosa pine stand. Remote Sens. 2018, 10, 1266. [Google Scholar] [CrossRef]
- Pix4D Drone Mapping Software. Swiss Fed Inst Technol Lausanne, Route Cantonale, Switz 2014. Available online: http://pix4d.com (accessed on 25 April 2019).
- Meier, U. Growth Stages of Mono- and Dicotyledonous Plants: BBCH-Monograph. 2001. Available online: http://www.politicheagricole.it/flex/AppData/WebLive/Agrometeo/MIEPFY800/BBCHengl2001.pdf (accessed on 5 May 2019).
- Nobuyuki, O. A Threshold Selection Method from Gray-Level Histograms. IEEE Trans. Syst. Man. Cybern. 1979, SMC-9, 62–66. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flight Date | Number of Images | Points in the Dataset | Point Density | Measured Average Height of Winter Wheat | Growth Stage |
|---|---|---|---|---|---|
| 16-May-2016 | 171 | 25,443,758 | 5933 pts/m2 | 42.3 cm | Stem Extension (BBCH 31) |
| 31-May-2016 | 235 | 19,543,425 | 4557 pts/m2 | 73.7 cm | Heading (BBCH 65) |
| 9-June-2016 | 226 | 14,935,952 | 3483 pts/m2 | 74.9 cm | Ripening (BBCH 83) |
| Sample ID | Ratio (α) | Acceptable Range of Threshold (%) | Mean Threshold (T)(%) |
|---|---|---|---|
| 1 | 3.31325 | 4.5–5.2 | 4.85 |
| 2 | 1.35944 | 4.6–10 | 7.30 |
| 3 | 8.21014 | 1.2–2.1 | 1.65 |
| 4 | 20.6328 | 0.4–0.7 | 0.55 |
| 5 | 8.31921 | 0.8–1.9 | 1.35 |
| 6 | 3.62604 | 0.2–4.0 | 2.10 |
| 7 | 3.96090 | 1.2–3.5 | 2.35 |
| 8 | 2.76710 | 0.8–7.3 | 4.05 |
| 9 | 2.06070 | 2.0–9.8 | 5.90 |
| 10 | 1.45030 | 3.6–5.9 | 4.75 |
| 11 | 8.28516 | 0.2–2.8 | 1.50 |
| 12 | 7.07155 | 0.1–2.5 | 1.30 |
| 13 | 1.32538 | 0.1–1.1 | 5.60 |
| 14 | 3.86219 | 0.3–4.9 | 2.60 |
| 15 | 7.20453 | 0.9–2.9 | 1.90 |
| Date | Average Height | Standard Deviation | Root Mean Square Error (RMSE) | Mean Absolute Error (MAE) | Unsolved Pixel Rate | |
|---|---|---|---|---|---|---|
| Moving cuboid filter | 16-May | 40.10 cm | 0.06 cm | 6.50 cm | 5.10 cm | 0.80% |
| 31-May | 76.70 cm | 0.07 cm | 4.50 cm | 3.80 cm | 8.30% | |
| Khanna’s method | 16-May | 26.00 cm | 11.33 cm | 17.03 cm | 15.50 cm | 19.40% |
| 31-May | 60.25 cm | 12.26 cm | 9.03 cm | 7.51 cm | 21.10% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, Y.; Wang, J. Winter Wheat Canopy Height Extraction from UAV-Based Point Cloud Data with a Moving Cuboid Filter. Remote Sens. 2019, 11, 1239. https://doi.org/10.3390/rs11101239
Song Y, Wang J. Winter Wheat Canopy Height Extraction from UAV-Based Point Cloud Data with a Moving Cuboid Filter. Remote Sensing. 2019; 11(10):1239. https://doi.org/10.3390/rs11101239
Chicago/Turabian StyleSong, Yang, and Jinfei Wang. 2019. "Winter Wheat Canopy Height Extraction from UAV-Based Point Cloud Data with a Moving Cuboid Filter" Remote Sensing 11, no. 10: 1239. https://doi.org/10.3390/rs11101239
APA StyleSong, Y., & Wang, J. (2019). Winter Wheat Canopy Height Extraction from UAV-Based Point Cloud Data with a Moving Cuboid Filter. Remote Sensing, 11(10), 1239. https://doi.org/10.3390/rs11101239