DCN-Based Spatial Features for Improving Parcel-Based Crop Classification Using High-Resolution Optical Images and Multi-Temporal SAR Data



Abstract
:1. Introduction
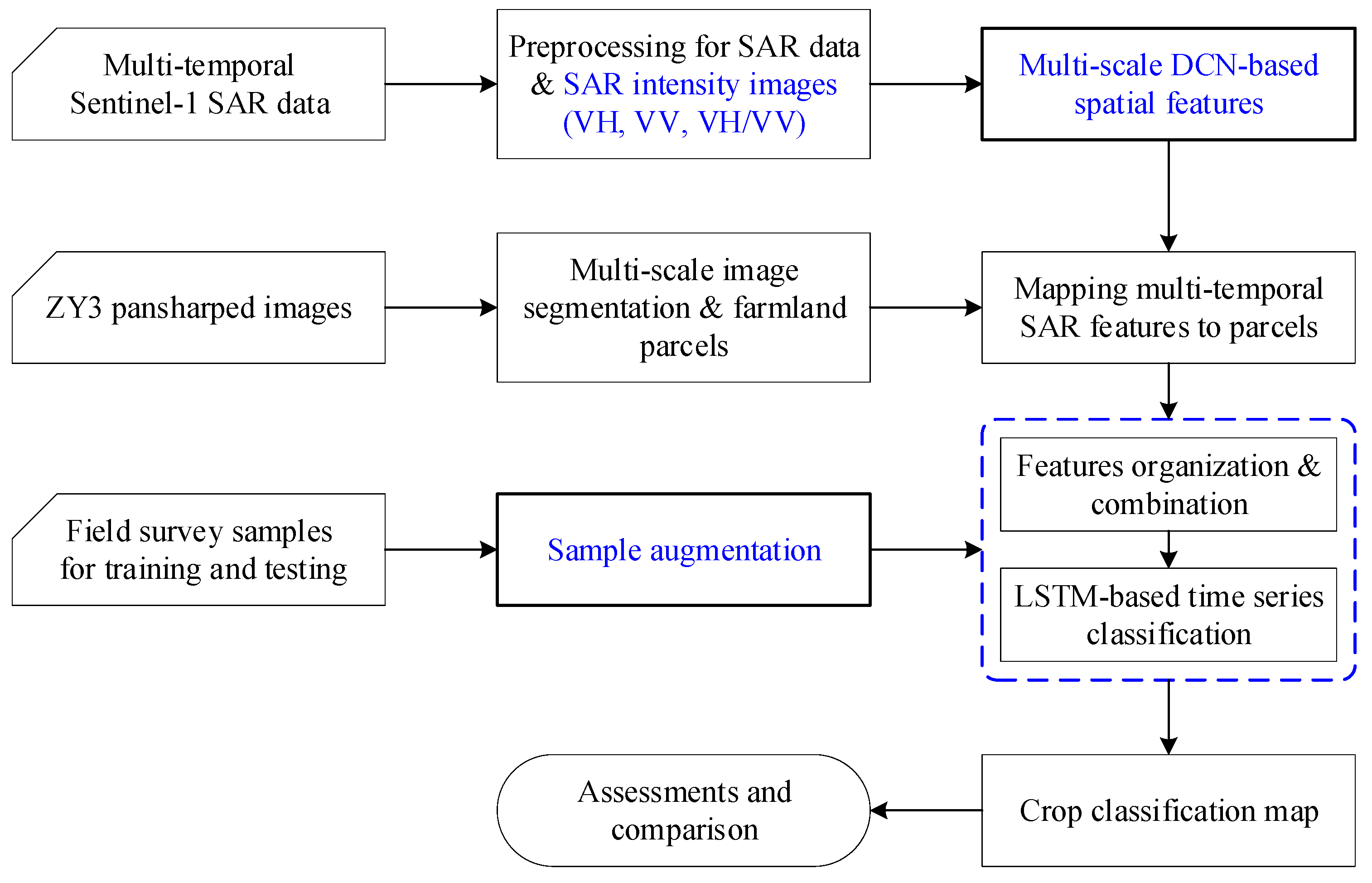
2. Methods
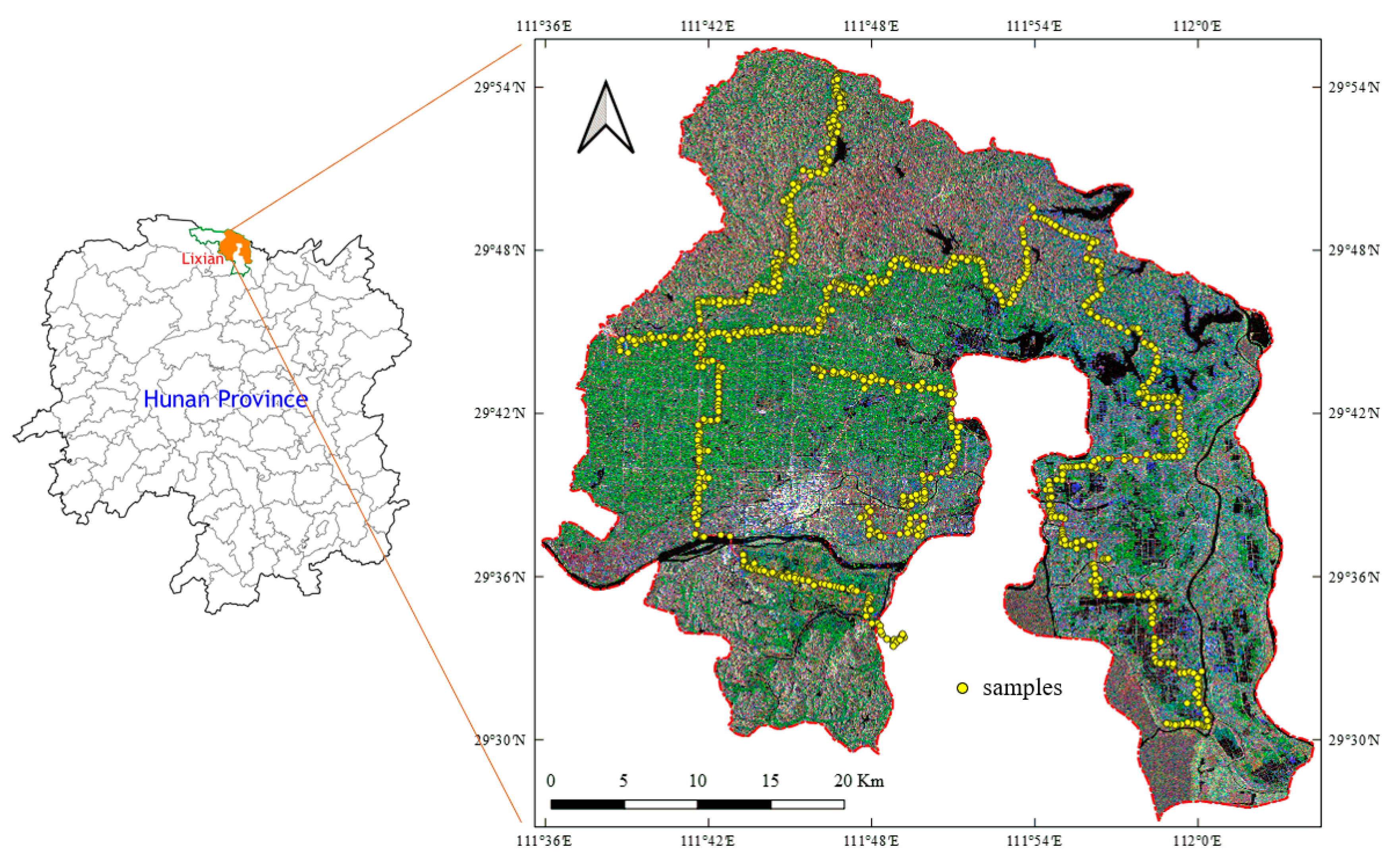
2.1. Study Area and Dataset
2.2. Data Processing
2.3. Spatial Features from SAR Data
2.3.1. GLCM-Based Features
2.3.2. DCN-Based Features
2.4. Plot-Based Time Series Construction
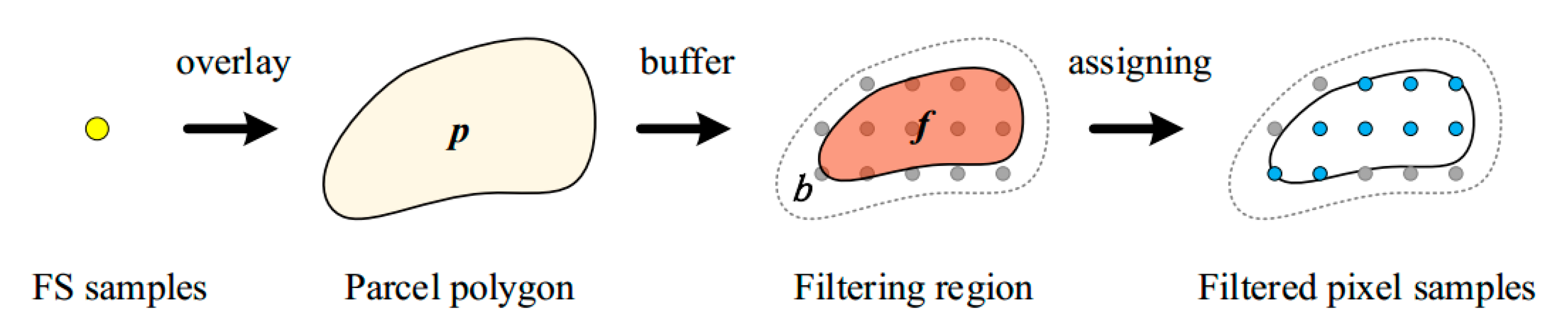
2.4.1. Farmland Parcels Extraction
2.4.2. Feature Mapping from SAR Data to Parcels
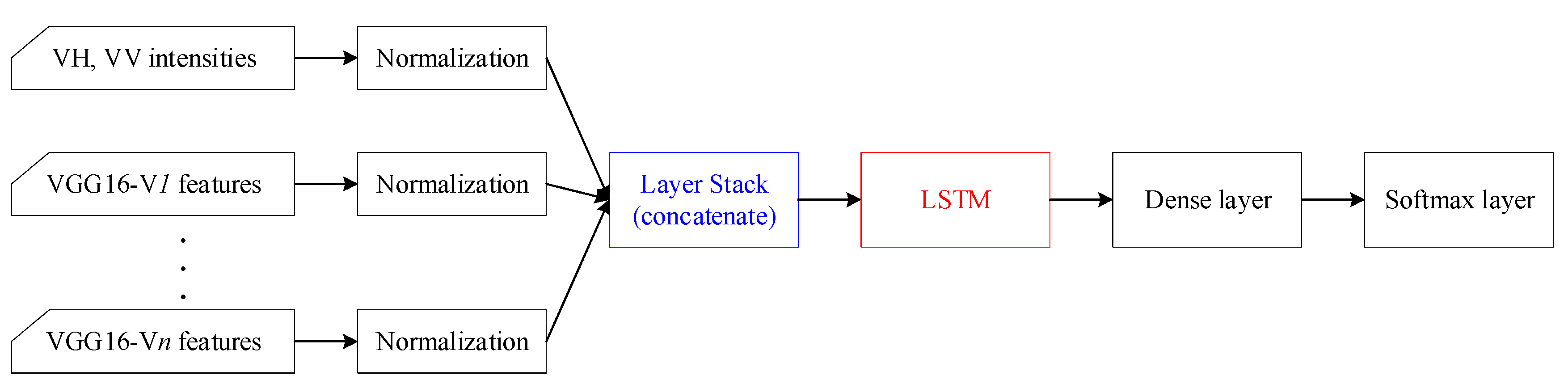
2.5. LSTM-Based Time-Series Classification
2.5.1. Sample Augmentation for Classification
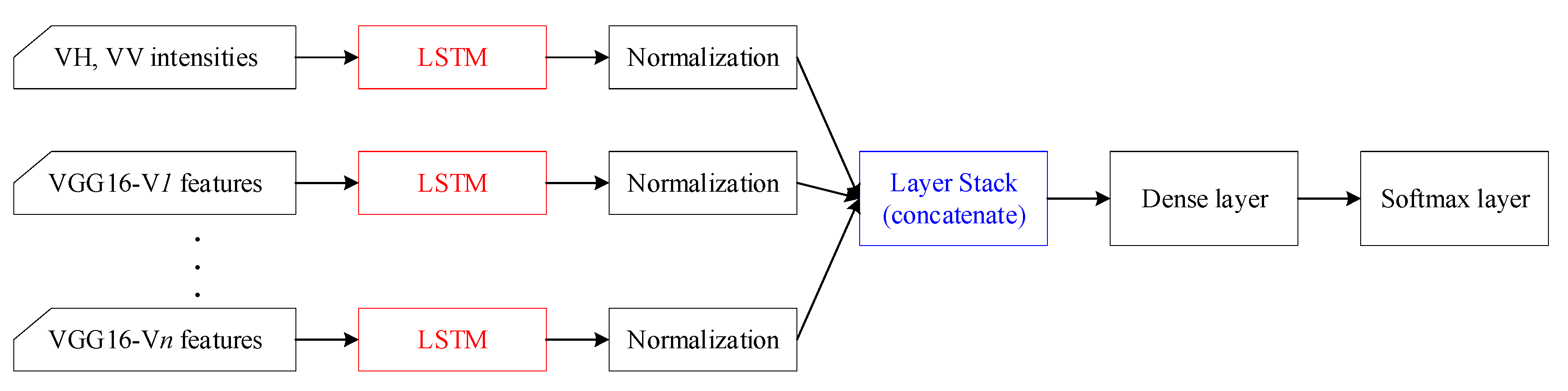
2.5.2. Structures for Organizing Spatial Features
2.6. Performance Evaluation
3. Experiments and Discussion
3.1. Evaluation and Discussion
3.1.1. DCN-Based Features versus GLCM-Based Features
3.1.2. Depth of DCN-Based Features
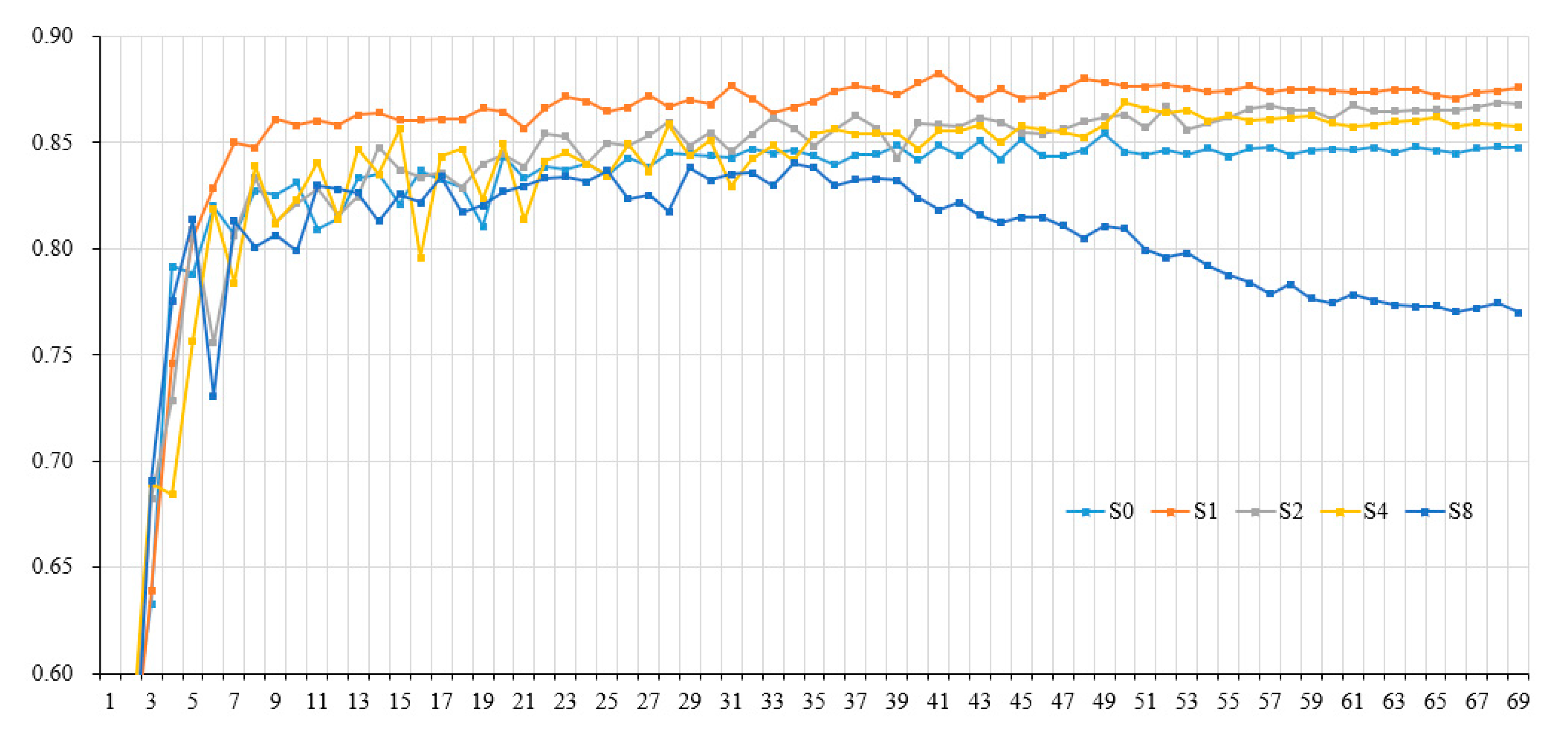
3.1.3. Better Structure of Classification Network
3.1.4. Which Features Benefit Which Crops?
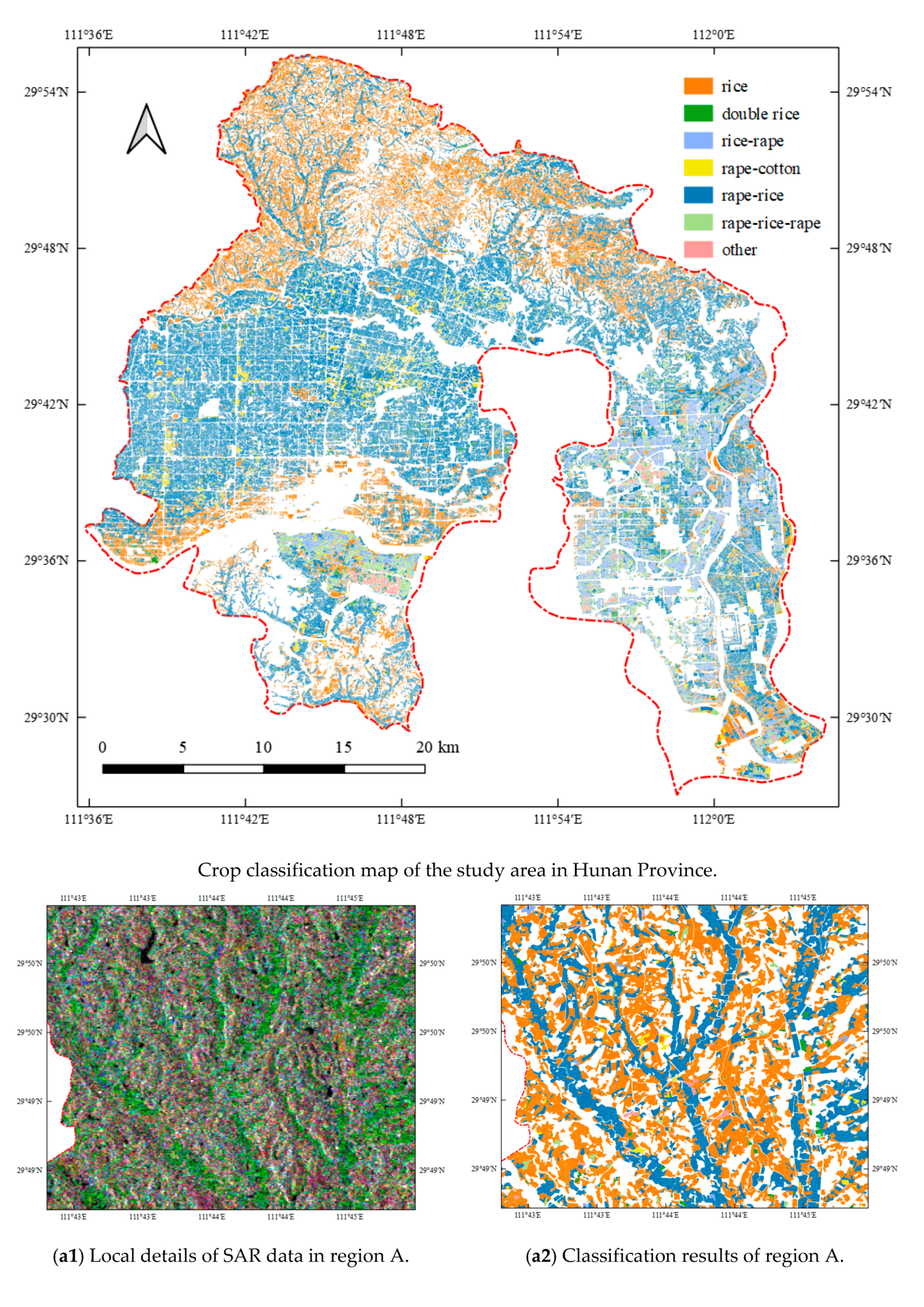
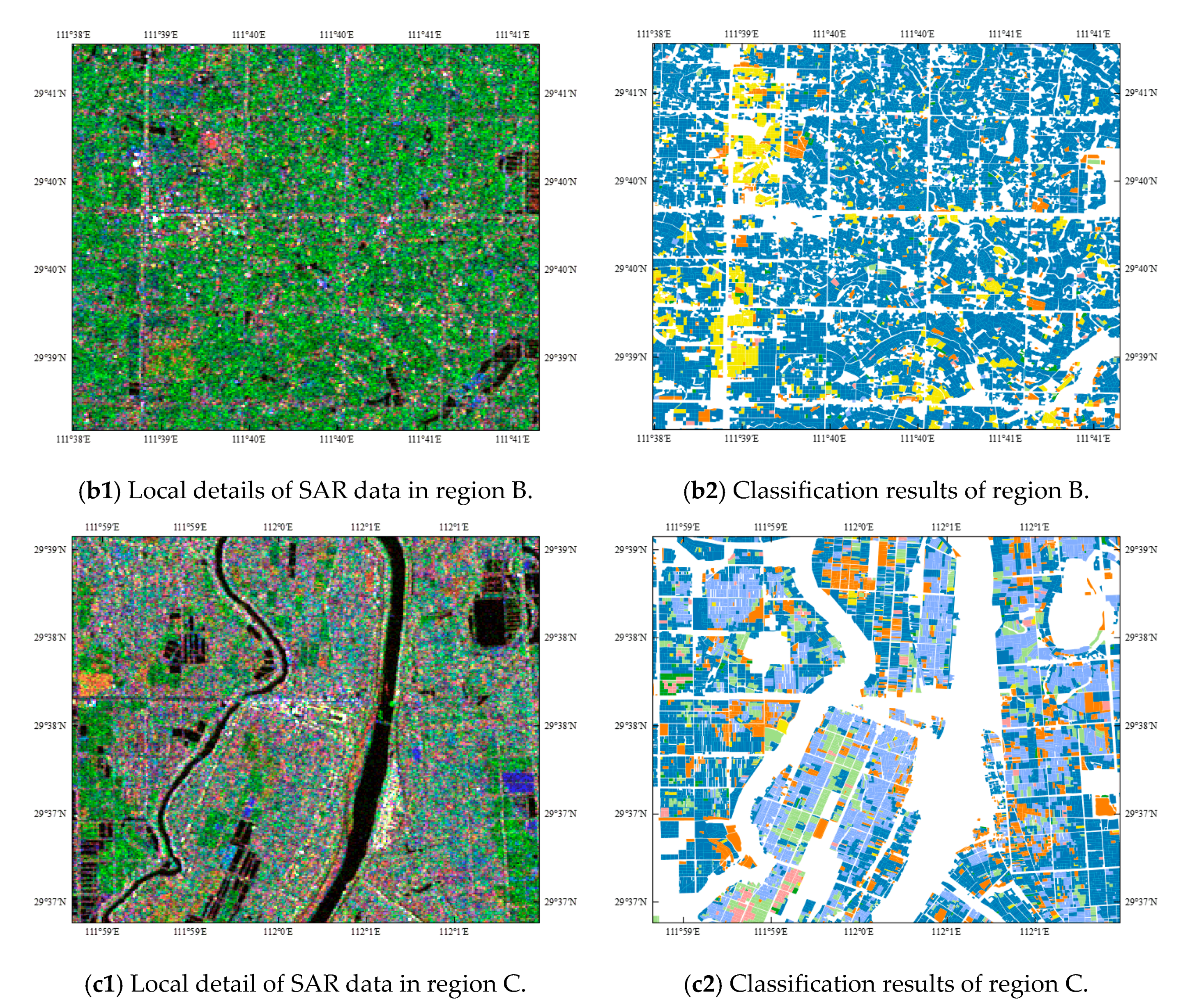
3.2. The Optimal Classification Results
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yang, Y.; Huang, Q.; Wu, W.; Luo, J.; Gao, L.; Dong, W.; Wu, T.; Hu, X. Geo-Parcel Based Crop Identification by Integrating High Spatial-Temporal Resolution Imagery from Multi-Source Satellite Data. Remote Sens. 2017, 9, 1298. [Google Scholar] [CrossRef]
- Veloso, A.; Mermoz, S.; Bouvet, A.; Le Toan, T.; Planells, M.; Dejoux, J.-F.; Ceschia, E. Understanding the temporal behavior of crops using Sentinel-1 and Sentinel-2-like data for agricultural applications. Remote Sens. Environ. 2017, 199, 415–426. [Google Scholar] [CrossRef]
- Shao, Y.; Fan, X.; Liu, H.; Xiao, J.; Ross, S.; Brisco, B.; Brown, R.; Staples, G. Rice monitoring and production estimation using multitemporal RADARSAT. Remote Sens. Environ. 2001, 76, 310–325. [Google Scholar] [CrossRef]
- Zhou, T.; Pan, J.; Zhang, P.; Wei, S.; Han, T. Mapping Winter Wheat with Multi-Temporal SAR and Optical Images in an Urban Agricultural Region. Sensors 2017, 17, 1210. [Google Scholar] [CrossRef] [PubMed]
- Gao, F.; Anderson, M.C.; Zhang, X.; Yang, Z.; Alfieri, J.G.; Kustas, W.P.; Mueller, R.; Johnson, D.M.; Prueger, J.H. Toward mapping crop progress at field scales through fusion of Landsat and MODIS imagery. Remote Sens. Environ. 2017, 188, 9–25. [Google Scholar] [CrossRef] [Green Version]
- Piedelobo, L.; Hernández-López, D.; Ballesteros, R.; Chakhar, A.; Del Pozo, S.; González-Aguilera, D.; Moreno, M.A. Scalable pixel-based crop classification combining Sentinel-2 and Landsat-8 data time series: Case study of the Duero river basin. Agric. Syst. 2019, 171, 36–50. [Google Scholar] [CrossRef]
- Jia, K.; Li, Q.; Tian, Y.; Wu, B.; Zhang, F.; Meng, J. Crop classification using multi-configuration SAR data in the North China Plain. Int. J. Remote Sens. 2012, 33, 170–183. [Google Scholar] [CrossRef]
- McNairn, H.; Kross, A.; Lapen, D.; Caves, R.; Shang, J. Early season monitoring of corn and soybeans with TerraSAR-X and RADARSAT-2. Int. J. Appl. Earth Obs. Geoinf. 2014, 28, 252–259. [Google Scholar] [CrossRef]
- Park, S.; Im, J.; Park, S.; Yoo, C.; Han, H.; Rhee, J. Classification and Mapping of Paddy Rice by Combining Landsat and SAR Time Series Data. Remote Sens. 2018, 10, 447. [Google Scholar] [CrossRef]
- Skriver, H. Crop Classification by Multitemporal C-and L-Band Single-and Dual-Polarization and Fully Polarimetric SAR. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2138–2149. [Google Scholar] [CrossRef]
- Zeyada, H.H.; Ezz, M.M.; Nasr, A.H.; Shokr, M.; Harb, H.M. Evaluation of the discrimination capability of full polarimetric SAR data for crop classification. Int. J. Remote Sens. 2016, 37, 2585–2603. [Google Scholar] [CrossRef]
- Kandaswamy, U.; Adjeroh, D.; Lee, M. Efficient texture analysis of SAR imagery. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2075–2083. [Google Scholar] [CrossRef]
- Numbisi, F.N.; Van Coillie, F.; De Wulf, R. Delineation of Cocoa Agroforests Using Multiseason Sentinel-1 SAR Images: A Low Grey Level Range Reduces Uncertainties in GLCM Texture-Based Mapping. ISPRS Int. J. Geo-Inf. 2019, 8, 179. [Google Scholar] [CrossRef]
- Lu, L.; Tao, Y.; Di, L. Object-Based Plastic-Mulched Landcover Extraction Using Integrated Sentinel-1 and Sentinel-2 Data. Remote Sens. 2018, 10, 1820. [Google Scholar] [CrossRef]
- Inglada, J.; Vincent, A.; Arias, M.; Marais-Sicre, C. Improved Early Crop Type Identification by Joint Use of High Temporal Resolution SAR and Optical Image Time Series. Remote Sens. 2016, 8, 362. [Google Scholar] [CrossRef]
- Reed, T.R.; Dubuf, J.M.H. A review of recent texture segmentation and feature extraction techniques. CVGIP Image Underst. 1993, 57, 359–372. [Google Scholar] [CrossRef]
- Hall-Beyer, M. Practical guidelines for choosing GLCM textures to use in landscape classification tasks over a range of moderate spatial scales. Int. J. Remote Sens. 2017, 38, 1312–1338. [Google Scholar] [CrossRef]
- Lan, Z.; Liu, Y. Study on Multi-Scale Window Determination for GLCM Texture Description in High-Resolution Remote Sensing Image Geo-Analysis Supported by GIS and Domain Knowledge. ISPRS Int. J. Geo-Inf. 2018, 7, 175. [Google Scholar] [CrossRef]
- Chen, S.; Wang, H.; Xu, F.; Jin, Y.-Q. Target Classification Using the Deep Convolutional Networks for SAR Images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1–12. [Google Scholar] [CrossRef]
- Lv, X.; Ming, D.; Chen, Y.; Wang, M. Very high resolution Remote sensing image classification with SEEDS-CNN and scale effect analysis for superpixel CNN classification. Int. J. Remote Sens. 2019, 40, 506–531. [Google Scholar] [CrossRef]
- Zhao, W.; Guo, Z.; Yue, J.; Zhang, X.; Luo, L. On combining multiscale deep learning features for the classification of hyperspectral Remote sensing imagery. Int. J. Remote Sens. 2015, 36, 3368–3379. [Google Scholar] [CrossRef]
- Liu, S.; Qi, Z.; Li, X.; Yeh, A.G.-O. Integration of Convolutional Neural Networks and Object-Based Post-Classification Refinement for Land Use and Land Cover Mapping with Optical and SAR Data. Remote Sens. 2019, 11, 690. [Google Scholar] [CrossRef]
- Kussul, N.; Lavreniuk, M.; Skakun, S.; Shelestov, A. Deep Learning Classification of Land Cover and Crop Types Using Remote Sensing Data. IEEE Geosci. Remote Sens. Lett. 2017, 14, 778–782. [Google Scholar] [CrossRef]
- Teimouri, N.; Dyrmann, M.; Jørgensen, R.N. A Novel Spatio-Temporal FCN-LSTM Network for Recognizing Various Crop Types Using Multi-Temporal Radar Images. Remote Sens. 2019, 11, 990. [Google Scholar] [CrossRef]
- Zhao, W.; Du, S. Learning multiscale and deep representations for classifying Remotely sensed imagery. ISPRS J. Photogramm. Remote Sens. 2016, 113, 155–165. [Google Scholar] [CrossRef]
- Romero, A.; Gatta, C.; Camps-Valls, G. Unsupervised Deep Feature Extraction for Remote Sensing Image Classification. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1349–1362. [Google Scholar] [CrossRef]
- Liu, Q.; Zhou, F.; Hang, R.; Yuan, X. Bidirectional-Convolutional LSTM Based Spectral-Spatial Feature Learning for Hyperspectral Image Classification. Remote Sens. 2017, 9, 1330. [Google Scholar] [Green Version]
- Convolutional LSTM Network: A Machine Learning Approach for Precipitation Nowcasting. Available online: https://arxiv.org/abs/1506.04214 (accessed on 30 June 2019).
- Zhong, L.; Hu, L.; Zhou, H. Deep learning based multi-temporal crop classification. Remote Sens. Environ. 2019, 221, 430–443. [Google Scholar] [CrossRef]
- Rußwurm, M.; Korner, M. Temporal vegetation modelling using long short-term memory networks for crop identification from medium-resolution multi-spectral satellite images. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Honolulu, HI, USA, 21–26 July 2017; pp. 11–19. [Google Scholar]
- Ndikumana, E.; Minh, D.H.T.; Baghdadi, N.; Courault, D.; Hossard, L. Deep Recurrent Neural Network for Agricultural Classification using multitemporal SAR Sentinel-1 for Camargue, France. Remote Sens. 2018, 10, 1217. [Google Scholar] [CrossRef]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft COCO: Common Objects in Context. In Proceedings of the European Conference on Computer Vision Proceedings of the Computer Vision–ECCV 2014, Zurich, Switzerland, 6–12 September 2014. [Google Scholar]
- Russakovsky, O.; Deng, J.; Su, H.; Krause, J.; Satheesh, S.; Ma, S.; Huang, Z.; Karpathy, A.; Khosla, A.; Bernstein, M.; et al. ImageNet Large Scale Visual Recognition Challenge. Int. J. Comput. Vis. 2014, 115, 211–252. [Google Scholar] [CrossRef]
- Han, X.; Zhong, Y.; Cao, L.; Zhang, L. Pre-Trained AlexNet Architecture with Pyramid Pooling and Supervision for High Spatial Resolution Remote Sensing Image Scene Classification. Remote Sens. 2017, 9, 848. [Google Scholar] [CrossRef]
- Nogueira, K.; Penatti, O.A.; Dos Santos, J.A. Towards better exploiting convolutional neural networks for Remote sensing scene classification. Pattern Recognit. 2017, 61, 539–556. [Google Scholar] [CrossRef]
- Hu, F.; Xia, G.-S.; Hu, J.; Zhang, L. Transferring Deep Convolutional Neural Networks for the Scene Classification of High-Resolution Remote Sensing Imagery. Remote Sens. 2015, 7, 14680–14707. [Google Scholar] [CrossRef] [Green Version]
- Castelluccio, M.; Poggi, G.; Sansone, C.; Verdoliva, L. Land Use Classification in Remote Sensing Images by Convolutional Neural Network. arXiv 2015, arXiv:1508.00092. Available online: https://arxiv.org/abs/1508.00092 (accessed on 30 June 2019).
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. arXiv 2014, arXiv:1409.1556. Available online: https://arxiv.org/abs/1409.1556 (accessed on 30 June 2019).
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June—1 July 2016. [Google Scholar]
- Huang, G.; Liu, Z.; Weinberger, K.Q. Densely Connected Convolutional Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Zhou, Y.; Li, J.; Feng, L.; Zhang, X.; Hu, X. Adaptive Scale Selection for Multiscale Segmentation of Satellite Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3641–3651. [Google Scholar] [CrossRef]
- Zhang, R.; Li, W.; Mo, T. Review of Deep Learning. arXiv 2018, arXiv:1804.01653. Available online: https://arxiv.org/abs/1804.01653 (accessed on 30 June 2019).
- Zhang, L.; Zhang, L.; Du, B. Deep Learning for Remote Sensing Data: A Technical Tutorial on the State of the Art. IEEE Geosci. Remote Sens. Mag. 2016, 4, 22–40. [Google Scholar] [CrossRef]
- Ball, J.E.; Anderson, D.T.; Chan, C.S. A Comprehensive Survey of Deep Learning in Remote Sensing: Theories, Tools and Challenges for the Community. J. Appl. Remote Sens. 2017, 11, 042609. [Google Scholar] [CrossRef]
- Ding, J.; Chen, B.; Liu, H.; Huang, M. Convolutional Neural Network With Data Augmentation for SAR Target Recognition. IEEE Geosci. Remote Sens. Lett. 2016, 13, 364–368. [Google Scholar] [CrossRef]
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data: Principles and Practices; CRC press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Sasaki, Y. The truth of the F-measure. Teach Tutor Mater 2007, 1, 1–5. [Google Scholar]
- Ahn, H.K.; Knauer, C.; Scherfenberg, M.; Schlipf, L.; Vigneron, A. Computing the discrete Fréchet distance with imprecise input. Int. J. Comput. Geom. Appl. 2012, 22, 27–44. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer Name | Spatial Resolution | Band Number | Label |
|---|---|---|---|
| block1_conv1, block1_conv2, block1_pool | ×2 | 64 | V1 |
| block2_conv1, block2_conv2, block2_pool | ×4 | 128 | V2 |
| block3_conv1, block3_conv2, block3_conv3, block3_pool | ×8 | 256 | V3 |
| block4_conv1, block4_conv2, block4_conv3, block4_pool | ×16 | 512 | V4 |
| block5_conv1, block5_conv2, block5_conv3, block5_pool | ×32 | 512 | V5 |
| Layer Name | Spatial Resolution (times) | Band Number | Label |
|---|---|---|---|
| bn_conv1 | ×2 | 64 | R1 |
| add_3 | ×4 | 256 | R2 |
| add_7 | ×8 | 512 | R3 |
| add_13 | ×16 | 1024 | R4 |
| add_16 | ×32 | 2048 | R5 |
| Layer Name | Spatial Resolution (times) | Band Number | Label |
|---|---|---|---|
| convl/relu | ×2 | 64 | D1 |
| pool2_conv | ×4 | 128 | D2 |
| pool3_conv | ×8 | 256 | D3 |
| pool4_conv | ×16 | 512 | D4 |
| bn | ×32 | 1024 | D5 |
| VH/VV (baseline) | VH/VV GLCM | VH/VV VGG16-V1 | VH/VV ResNet50-R1 | VH/VV DenseNet121-D1 | |
|---|---|---|---|---|---|
| OA (%) | 83.32 | 84.49 | 86.93 | 87.61 | 87.87 |
| kappa | 80.28 | 80.74 | 81.24 | 82.13 | 82.96 |
| First Group | Second Group | Third Group | |||
|---|---|---|---|---|---|
| Label | Feature Sets | Label | Feature Sets | Label | Feature Sets |
| M0 | VH/VV | ||||
| V1 | V1 | F1 | V1 | M1 | VH/VV+V1 |
| V2 | V2 | F2 | V1+V2 | M2 | VH/VV+V1+V2 |
| V3 | V3 | F3 | V1+V2+V3 | M3 | VH/VV+V1+V2+V3 |
| V4 | V4 | F4 | V1+V2+V3+V4 | M4 | VH/VV+V1+V2+V3+V4 |
| V5 | V5 | F5 | V1+V2+V3+V4+V5 | M5 | VH/VV+V1+V2+V3+V4+V5 |
| First group | V1 | V2 | V3 | V4 | V5 | |
| OA (%) | 81.27 | 71.48 | 53.81 | - | - | |
| kappa | 78.82 | 63.37 | 40.85 | - | - | |
| Second group | F1 | F2 | F3 | F4 | F5 | |
| OA (%) | 81.27 | 81.56 | 82.39 | 82.31 | 82.84 | |
| kappa | 78.82 | 79.27 | 78.53 | 77.92 | 78.09 | |
| Third group | M0 | M1 | M2 | M3 | M4 | M5 |
| OA (%) | 83.32 | 87.61 | 88.15 | 88.23 | 88.09 | 88.31 |
| kappa | 80.28 | 82.13 | 82.84 | 82.96 | 82.79 | 82.71 |
| VH/VV GLCM | VH/VV VGG16-V1 | VH/VV ResNet50-R1 | VH/VV DenseNet121-D1 | ||
|---|---|---|---|---|---|
| C-L | OA (%) | 84.32 | 85.23 | 85.27 | 85.84 |
| kappa | 80.86 | 81.79 | 82.45 | 82.61 | |
| L-C | OA (%) | 84.49 | 86.93 | 87.61 | 87.87 |
| kappa | 80.74 | 81.24 | 82.13 | 82.96 |
| Label | Structure of Network | # Feature Sets |
|---|---|---|
| S0 | VH/VV/V1/V2/V3/V4/V5 | 7 |
| S1 | VH+VV+V1+V2+V3+V4+V5 | 7 |
| S2 | VH+VV+V11+V12+V21+V22+V31+V32+V41+V42+V51+V52 | 12 |
| S4 | VH+VV+V11+V12+…+V14+V21+V22+…+V24+V31+V32+…+V34+V41+V42+…+V44+V51+V52+…+V54 | 22 |
| S8 | VH+VV+V11+V12+…+V18+V21+V22+…+V28+V31+V32+…+V38+V41+V42+…+V48+V51+V52+…+V58 | 42 |
| S0 | S1 | S2 | S4 | S8 | |
|---|---|---|---|---|---|
| OA (%) | 85.42 | 88.26 | 87.56 | 86.91 | 84.02 |
| kappa | 80.27 | 82.77 | 81.43 | 80.84 | 80.80 |
| Epoch time(s) | 21 | 37 | 58 | 113 | 194 |
| Epochs | 49 | 41 | 61 | 50 | - |
| Crop | Rice | Double Rice | Rice–Rape | Rape–Cotton | Rape–Rice | Rape–Rice–Rape | Other |
|---|---|---|---|---|---|---|---|
| UA (%) | 84.82 | 91.33 | 92.64 | 93.63 | 86.72 | 90.99 | 83.29 |
| PA (%) | 86.31 | 91.94 | 91.18 | 91.12 | 87.67 | 89.70 | 82.75 |
| F1 | 0.8556 | 0.9163 | 0.9190 | 0.9236 | 0.8719 | 0.9034 | 0.8302 |
| OA (%) | 89.41 | ||||||
| kappa | 0.8293 | ||||||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Y.; Luo, J.; Feng, L.; Zhou, X. DCN-Based Spatial Features for Improving Parcel-Based Crop Classification Using High-Resolution Optical Images and Multi-Temporal SAR Data. Remote Sens. 2019, 11, 1619. https://doi.org/10.3390/rs11131619
Zhou Y, Luo J, Feng L, Zhou X. DCN-Based Spatial Features for Improving Parcel-Based Crop Classification Using High-Resolution Optical Images and Multi-Temporal SAR Data. Remote Sensing. 2019; 11(13):1619. https://doi.org/10.3390/rs11131619
Chicago/Turabian StyleZhou, Ya’nan, Jiancheng Luo, Li Feng, and Xiaocheng Zhou. 2019. "DCN-Based Spatial Features for Improving Parcel-Based Crop Classification Using High-Resolution Optical Images and Multi-Temporal SAR Data" Remote Sensing 11, no. 13: 1619. https://doi.org/10.3390/rs11131619
APA StyleZhou, Y., Luo, J., Feng, L., & Zhou, X. (2019). DCN-Based Spatial Features for Improving Parcel-Based Crop Classification Using High-Resolution Optical Images and Multi-Temporal SAR Data. Remote Sensing, 11(13), 1619. https://doi.org/10.3390/rs11131619