Interference Mitigation for Synthetic Aperture Radar Based on Deep Residual Network


 ,
,
Abstract
:
1. Introduction
2. Interference Formulation and Detection
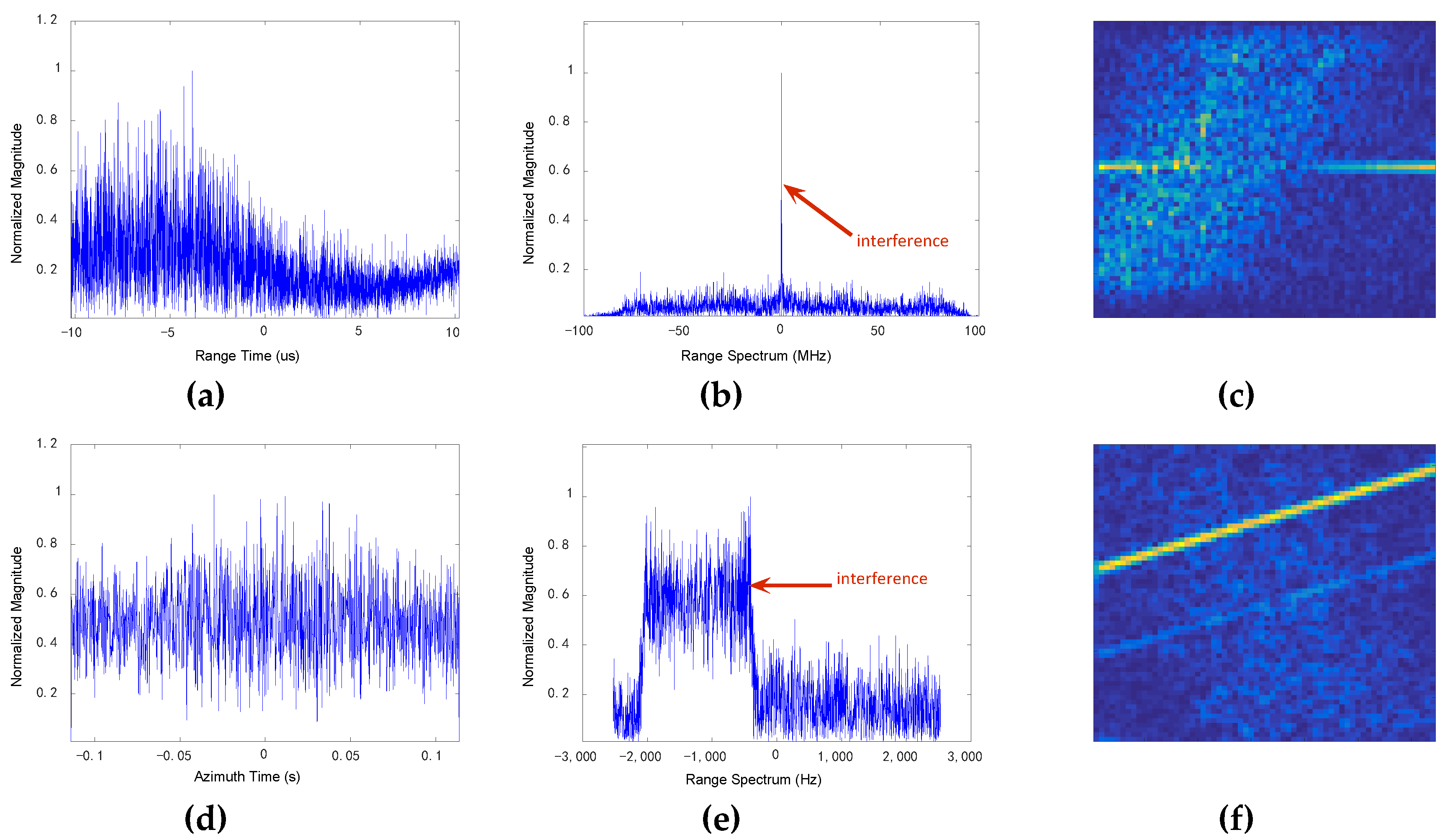
2.1. Interference Formulation
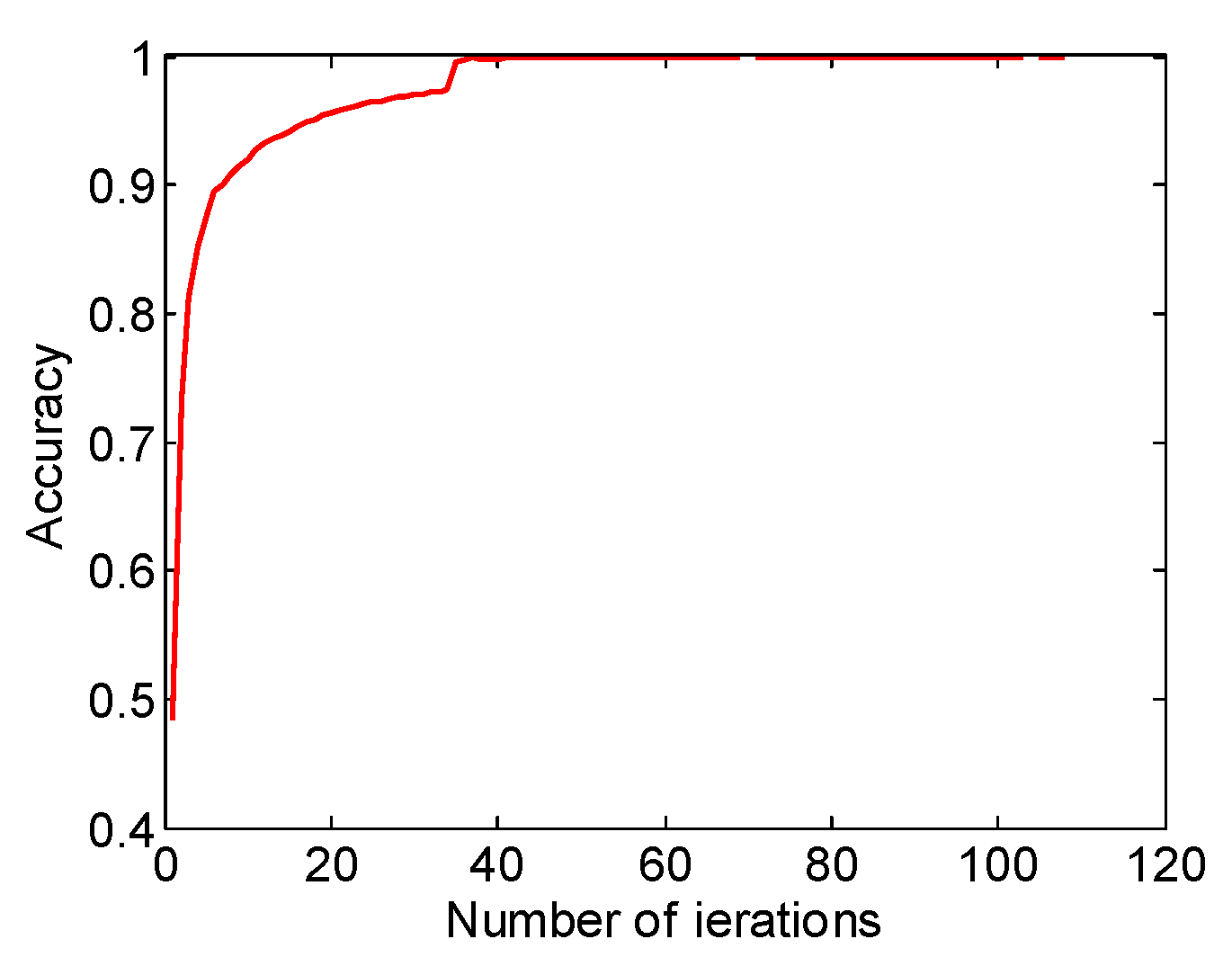
2.2. Interference Detection
2.2.1. Convolutional Layer
2.2.2. Pooling Layer
2.2.3. Softmax Classifier
2.2.4. Back Propagation Algorithm
3. Theory and Methodology
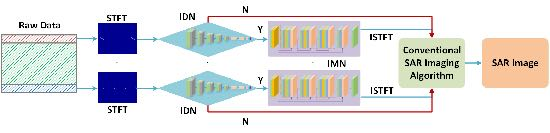
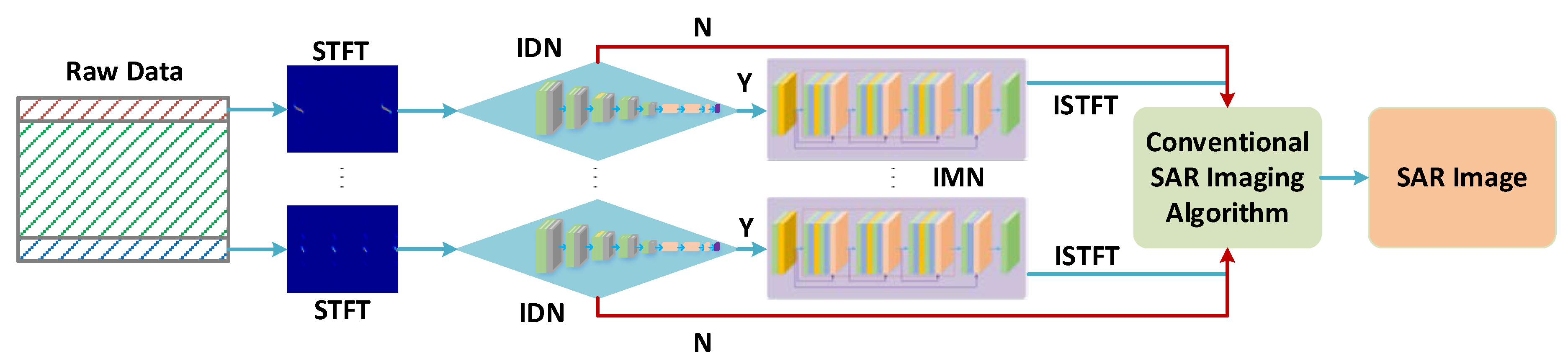
3.1. Interference Mitigation Network
3.2. Evaluation Measures
3.2.1. ISR
3.2.2. SDR
3.2.3. MNR
3.2.4. AG
3.2.5. MSD
3.2.6. GLD
4. Experimental Results
4.1. Results of the Simulated Data
4.2. Results of the Measured NBI-Corrupted Data
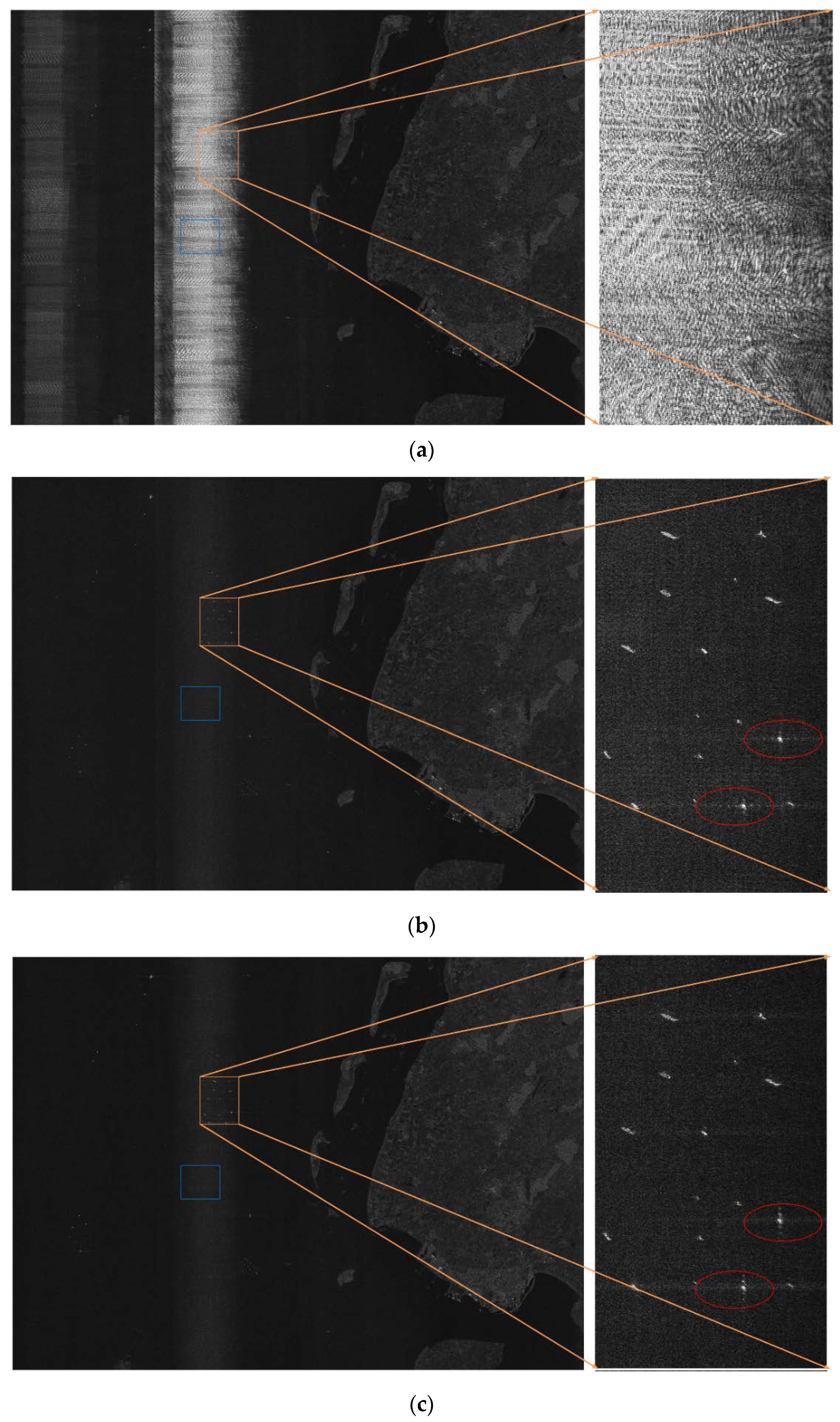
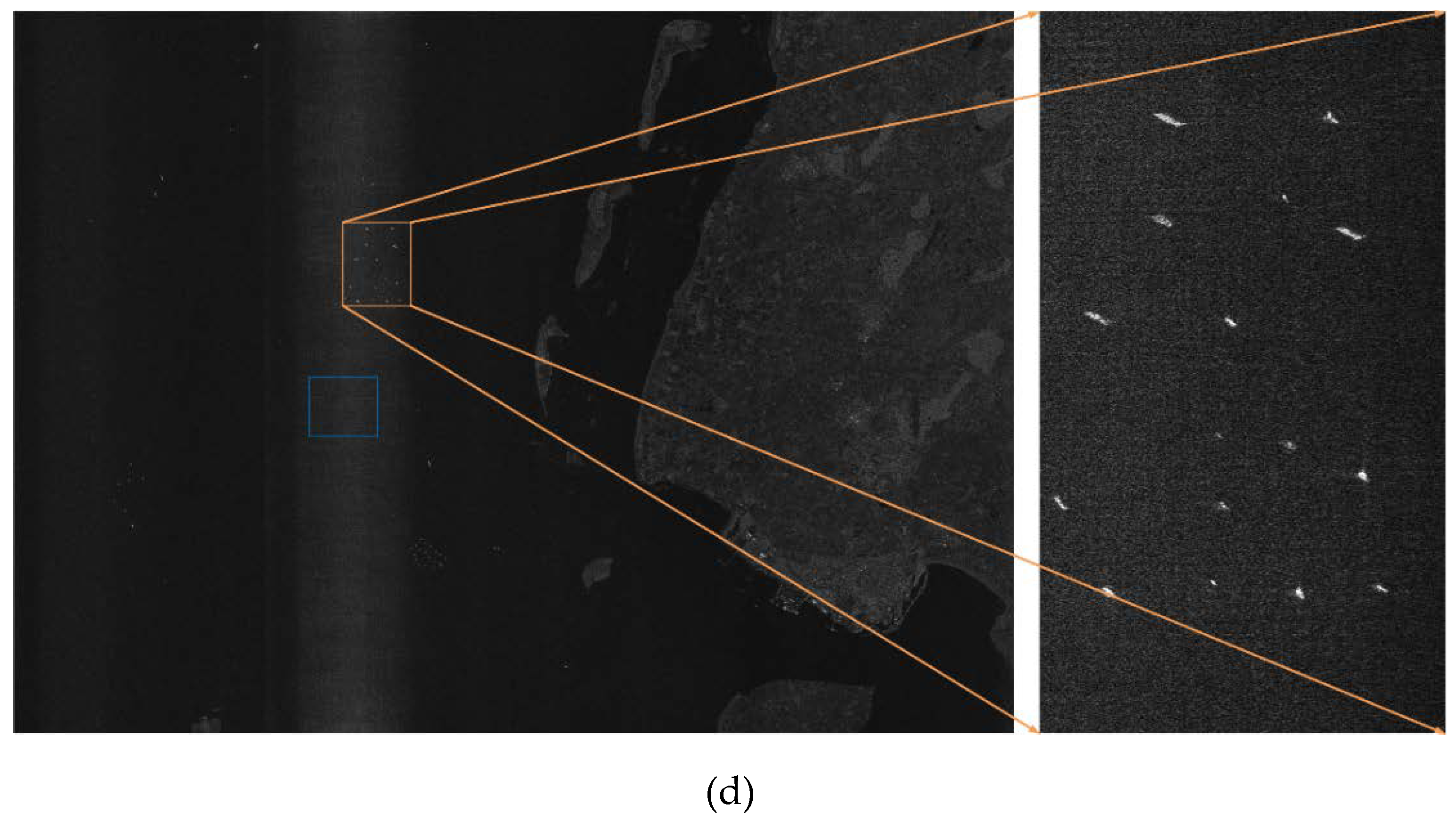
4.3. Results of the Measured WBI-Corrupted Data
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Moreira, A.; Prats-Iraola, P.; Younis, M.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.P. A tutorial on synthetic aperture radar. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–43. [Google Scholar] [CrossRef] [Green Version]
- Reigber, A.; Scheiber, R.; Jager, M.; Pau, P.; Hajnsek, I.; Jagdhuber, T. Very-high-resolution airborne synthetic aperture radar imaging: signal processing and applications. Proc. IEEE 2013, 101, 759–783. [Google Scholar] [CrossRef]
- Dudczyk, J.; Kawalec, A.; Cyrek, J. Applying the distance and similarity functions to radar signals identification. In Proceedings of the 2008 International Radar Symposium, Wroclaw, Poland, 21–23 May 2008. [Google Scholar]
- Dudczyk, J.; Kawalec, A. Optimizing the minimum cost flow algorithm for the phase unwrapping process in SAR radar. Bull. Pol. Acad. Sci. Tech. Sci. 2014, 62, 511–516. [Google Scholar] [CrossRef] [Green Version]
- Matuszewski, J. Radar signal identification using a neural network and pattern recognition methods. In Proceedings of the 2018 14th International Conference on Advanced Trends in Radioelecrtronics, Telecommunications and Computer Engineering (TCSET), Lviv-Slavske, Ukraine, 20–24 February 2018; pp. 79–83. [Google Scholar]
- Kim, A.; Dogan, S.; Fisher, J., III; Moses, R.; Willsky, A. Attributing scatterer anisotropy for model based ATR. In Proceedings of the International Society for Optical Engineering, Orlando, FL, USA, 24–28 April 2000; pp. 176–188. [Google Scholar]
- Sadjadi, A. New experiments in inverse synthetic aperture radar image exploitation for maritime surveillance, In Proceedings of the International Society for Optical Engineering, Baltimore, MD, USA, 5–6 May 2014.
- Meyer, F.; Nicoll, J.; Doulgeris, A. Correction and characterization of radio frequency interference signatures in l-band syntheticaperture radar data. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4961–4972. [Google Scholar] [CrossRef]
- Su, J.; Tao, H.; Tao, M.; Wang, L.; Xie, J. Narrow-band interference suppression via rpca-based signal separation in time–frequency domain. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 5016–5025. [Google Scholar] [CrossRef]
- Zhou, F.; Xing, M.; Bai, X.; Sun, G.; Bao, Z. Narrow-band interference suppression for sar based on complex empirical mode decomposition. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3202–3218. [Google Scholar]
- Zhou, F.; Tao, M. Research on methods for narrow-band interference suppression in synthetic aperture radar data. IEEE J. Sel. Top. Appl. Earth Obs. 2015, 8, 3476–3485. [Google Scholar] [CrossRef]
- Tao, M.; Zhou, F.; Zhang, Z. Wideband interference mitigation in high-resolution airborne synthetic aperture radar data. IEEE Trans. Geosci. Remote Sens. 2016, 54, 74–87. [Google Scholar] [CrossRef]
- Su, J.; Tao, H.; Tao, M.; Xie, J.; Wang, Y.; Wang, L. Time-Varying SAR Interference Suppression Based on Delay-Doppler Iterative Decomposition Algorithm. Remote Sens. 2018, 10, 1491. [Google Scholar] [CrossRef]
- Yu, J.; Li, J.; Sun, B.; Chen, J.; Li, C. Multiclass Radio Frequency Interference Detection and Suppression for SAR Based on the Single Shot MultiBox Detector. Sensors 2018, 18, 4034. [Google Scholar] [CrossRef]
- Nguyen, L.; Soumekh, M. Suppression of radio frequency interference (RFI) for synchronous impulse reconstruction ultra-wideband radar. Proc. SPIE 2005, 5808, 178–184. [Google Scholar]
- Yi, J.; Wan, X.; Cheng, F.; Gong, Z. Computationally efficient RF interference suppression method with closed-form maximum likelihoodestimator for HF surface wave over-the-horizon radars. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2361–2372. [Google Scholar] [CrossRef]
- Ojowu, O.; Li, J. RFI suppression for synchronous impulse reconstruction UWB radar using RELAX. Int. J. Remote Sens. Appl. 2013, 3, 33–46. [Google Scholar]
- Guo, Y.; Zhou, F.; Tao, M.; Sheng, M. A new method for sar radio frequency interference mitigation based on maximum a posterior estimation. In Proceedings of the 2017 32nd General Assembly and Scientific Symposium of the International Union of Radio Science, Montreal, QC, Canada, 19–26 August 2017; pp. 1–4. [Google Scholar]
- Reigber, A.; Ferro-Famil, L. Interference suppression in synthesized sar images. IEEE Geosci. Remote Sens. Lett. 2005, 2, 45–49. [Google Scholar] [CrossRef]
- Smith, L.; Hill, R.; Hayward, S.; Yates, G.; Blake, A. Filtering approaches for interference suppression in low-frequency sar. IEE Radar Sonar Navig. 2006, 153, 338–344. [Google Scholar] [CrossRef]
- Zhou, F.; Wu, R.; Xing, M.; Bao, Z. Eigensubpace-based filtering with application in narrow-band interference suppression for sar. IEEE Geosci. Remote Sens. Lett. 2007, 4, 75–79. [Google Scholar] [CrossRef]
- Wang, X.; Yu, W.; Qi, X.; Liu, Y. RFI suppression in SAR based on approximate spectral decomposition algorithm. Electron. Lett. 2012, 48, 594–596. [Google Scholar] [CrossRef]
- Feng, J.; Zheng, H.; Deng, Y.; Gao, D. Application of subband spectral cancellation for sar narrow-band interference suppression. IEEE Geosci. Remote Sens. Lett. 2012, 9, 190–193. [Google Scholar] [CrossRef]
- Spencer, M.; Chen, C.; Ghaemi, H.; Chan, S.; Belz, J. RFI characterization and mitigation for the smap radar. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4973–4982. [Google Scholar] [CrossRef]
- Huang, Y.; Liao, G.; Li, J.; Xu, J. Narrowband RFI suppression for sar system via fast implementation of joint sparsity and low-rank property. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2748–2761. [Google Scholar] [CrossRef]
- Huang, Y.; Liao, G.; Xu, J.; Li, J. Narrowband RFI suppression for sar system via efficient parameter-free decomposition algorithm. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3311–3321. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G. ImageNet classification with deep convolutional neural networks. In Proceeding of the 2012 Advances in Neural Information Processing Systems (NIPS), Lake Tahoe, NV, USA, 3–6 December 2012; pp. 1097–1105. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. In Proceedings of the 2015 International Conference Learning Representations (ICLR), New York, NY, USA, 7–9 May 2015; pp. 1–14. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 770–778. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed]
- Redmon, J.; Divvala, S.; Girshick, S.; Farhadi, A. You only look once: unified, real-time object detection. In Proceedings of the 2016 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 779–788. [Google Scholar]
- Shelhamer, E.; Long, J.; Darrell, T. Fully convolutional networks for semantic segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 640–651. [Google Scholar] [CrossRef] [PubMed]
- Dronner, J.; Korfhage, N.; Egli, S.; Muhling, M.; Thies, B.; Bendix, J.; Freisleben, B.; Seeger, B. Fast cloud segmentation using convolutional neural networks. Remote Sens. 2018, 10, 1782. [Google Scholar] [CrossRef]
- Noh, H.; Hong, S.; Han, B. Learning deconvolution network for semantic segmentation. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 11–18 December 2015; pp. 1520–1528. [Google Scholar]
- Wang, P.; Zhang, H.; Patel, V. Generative adversarial network-based restoration of speckled SAR images. In Proceedings of the 2017 IEEE 7th International Workshop on Computational Advances in Multi-Sensor Adaptive Processing (CAMSAP), Curacao, Netherlan, 10–13 December 2017; pp. 1–5. [Google Scholar]
- Michelsanti, D.; Tan, Z. Conditional generative adversarial networks for speech enhancement and noise-robust speaker verification. In Proceedings of the Annual Conference of the International Speech Communication Association, Stockholm, Sweden, 20–24 August 2017; pp. 2008–2012. [Google Scholar]
- Ledig, C.; Theis, L.; Huszar, F.; Caballero, J.; Cunningham, A.; Acosta, A.; Aitken, A.; Tejani, A.; Totz, J.; Wang, Z.; et al. Photo-realistic single image super-resolution using a generative adversarial network. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, Hawaii, HI, USA, 21–26 July 2017; pp. 105–114. [Google Scholar]
- Zhao, W.; Wang, D.; Lu, H. Multi-focus image fusion with a natural enhancement via joint multi-level deeply supervised convolutional neural network. IEEE Trans. Circuits Syst. Video Technol. 2018, 29, 1102–1115. [Google Scholar] [CrossRef]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial networks. In Proceeding of the 2014 Advances in Neural Information Processing Systems (NIPS), Montreal, AB, Canada, 8–11 December 2014; pp. 2672–2680. [Google Scholar]
- Arjovsky, M.; Chintala, S.; Bottou, L. Wasserstein generative adversarial networks. In Proceedings of the 34th International Conference on Machine Learning (ICML), Sydney, Australia, 6–11 August 2017; pp. 298–321. [Google Scholar]
- Isola, P.; Zhu, J.; Zhou, T.; Efros, A. Image-to-image translation with conditional adversarial networks. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, Hawaii, HI, USA, 21–26 July 2017; pp. 5967–5976. [Google Scholar]
- Wang, C.; Xu, C.; Wang, C.; Tao, D. Perceptual adversarial networks for image-to-image transformation. IEEE Trans. Image Process. 2018, 27, 4066–4079. [Google Scholar] [CrossRef] [PubMed]
- Abadi, M.; Barham, P.; Chen, J.; Chen, Z.; Davis, A.; Dean, J.; Devin, M.; Ghemawat, S.; Irving, G.; Isard, M.; et al. Tensorflow: A system for large-scale machine learning. In Proceedings of the 12th {USENIX} Symposium on Operating Systems Design and Implementation ({OSDI} 16), Savannah, GA, USA; 2016; pp. 265–283. [Google Scholar]
- Kingma, D.; Adam, B. A method for stochastic optimization. In Proceedings of the 2014 International Conference on Learning Representations (ICLR), Banff, AB, Canada, 14–16 April 2014; pp. 1–15. [Google Scholar]
- Cui, G.; Feng, H.; Xu, Z.; Li, Q.; Chen, Y. Detail preserved fusion of visible and infrared images using regional saliency extraction and multi-scale image decomposition. Opt. Commun. 2015, 341, 199–209. [Google Scholar] [CrossRef]
- Li, Z.; Liu, C. Gray level difference-based transition region extraction and thresholding. Comput. Electr. Eng. 2009, 35, 696–704. [Google Scholar] [CrossRef]
- Zan, F.; Guarnieri, A. Topsar: terrain observation by progressive scans. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2352–2360. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input: Images in the Temporal–Frequency Domain | |
|---|---|
| Layer 1 | Conv. (3,3,64), stride = 1; ReLU layer; |
| Layer 2 | Conv. (3,3,64), stride = 1; ReLU layer; |
| Layer 3 | MP. (2,2), stride = 2; |
| Layer 4 | Conv. (3,3,128), stride = 1; ReLU layer; |
| Layer 5 | Conv. (3,3,128), stride = 1; ReLU layer; |
| Layer 6 | MP. (2,2), stride = 2; |
| Layer 7 | Conv. (3,3,256), stride = 1; ReLU layer; |
| Layer 8 | Conv. (3,3,256), stride = 1; ReLU layer; |
| Layer 9 | Conv. (3,3,256), stride = 1; ReLU layer; |
| Layer 10 | MP. (2,2), stride = 2; |
| Layer 11 | Conv. (3,3,512), stride = 1; ReLU layer; |
| Layer 12 | Conv. (3,3,512), stride = 1; ReLU layer; |
| Layer 13 | Conv. (3,3,512), stride = 1; ReLU layer; |
| Layer 14 | MP. (2,2), stride = 2; |
| Layer 15 | Conv. (3,3,512), stride = 1; ReLU layer; |
| Layer 16 | Conv. (3,3,512), stride = 1; ReLU layer; |
| Layer 17 | Conv. (3,3,512), stride = 1; ReLU layer; |
| Layer 18 | MP. (2,2), stride = 2; |
| Layer 19 | Fc. (1,1,4096); |
| Layer 20 | Fc. (1,1,4096); |
| Layer 21 | Fc. (1,1,2); |
| Layer 22 | Softmax layer. |
| Interference Mitigation Network | |
|---|---|
| Input: Images in the Temporal–Frequency Domain | |
| Layer 1 | Conv. (3,3,64), stride = 1; ReLU layer; |
| Block 1 | Conv. (3,3,64), stride = 1; BN; ReLU layer; Conv. (3,3,64), stride = 1; BN; Es. (Layer 1); |
| Block 2 | Conv. (3,3,64), stride = 1; BN; ReLU layer; Conv. (3,3,64), stride = 1; BN; Es. (Block 1); |
| …… | |
| Block 16 | Conv. (3,3,64), stride = 1; BN; ReLU layer; Conv. (3,3,64), stride = 1; BN; Es. (Block 15); |
| Layer 18 | Conv. (3,3,64), stride = 1; BN; Es. (Layer 1); |
| Layer 19 | Conv. (3,3,64), stride=1. |
| Range-Spectrum Notch Filtering | Eigensubspace Filtering | IMN | Improvement (%) | |
|---|---|---|---|---|
| ISR(dB) | 5.08 | 5.09 | 5.32 | 4.72/4.52 |
| SDR(dB) | −11.66 | −11.75 | −12.32 | 5.66/4.81 |
| Instantaneous-Spectrum Notch Filtering | Eigensubspace Filtering | IMN | Improvement (%) | |
|---|---|---|---|---|
| ISR(dB) | 5.47 | 5.49 | 5.49 | 0.37/0.00 |
| SDR(dB) | –9.62 | –10.22 | –12.77 | 32.74/24.95 |
| Range Spectrum Notch Filtering | Eigensubspace Filtering | IMN | Improvement (%) | |
|---|---|---|---|---|
| AG | 4.926 | 4.974 | 5.288 | 7.35/6.31 |
| MSD | 0.049 | 0.050 | 0.052 | 6.12/4.00 |
| GLD | 41.561 | 41.941 | 44.524 | 7.13/6.16 |
| Instantaneous Spectrum Notch Filtering | Eigensubspace Filtering | IMN | Improvement (%) | |
|---|---|---|---|---|
| MNR (dB) | −15.03 | −15.43 | −15.72 | 4.59/1.88 |
| AG | 6.25 | 6.41 | 6.69 | 7.04/4.37 |
| MSD | 0.052 | 0.053 | 0.055 | 5.77/3.77 |
| GLD | 50.407 | 51.747 | 53.875 | 6.88/4.11 |
| Instantaneous Spectrum Notch Filtering | Eigensubspace Filtering | IMN | Improvement (%) | |
|---|---|---|---|---|
| MNR (dB) | –0.43 | –0.60 | –0.64 | 48.84/6.67 |
| AG | 3.55 | 3.21 | 3.83 | 7.89/19.31 |
| MSD | 0.013 | 0.012 | 0.015 | 15.38/25.00 |
| GLD | 29.16 | 26.20 | 30.85 | 5.80/17.75 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, W.; Zhou, F.; Tao, M.; Bai, X.; Rong, P.; Yang, S.; Tian, T. Interference Mitigation for Synthetic Aperture Radar Based on Deep Residual Network. Remote Sens. 2019, 11, 1654. https://doi.org/10.3390/rs11141654
Fan W, Zhou F, Tao M, Bai X, Rong P, Yang S, Tian T. Interference Mitigation for Synthetic Aperture Radar Based on Deep Residual Network. Remote Sensing. 2019; 11(14):1654. https://doi.org/10.3390/rs11141654
Chicago/Turabian StyleFan, Weiwei, Feng Zhou, Mingliang Tao, Xueru Bai, Pengshuai Rong, Shuang Yang, and Tian Tian. 2019. "Interference Mitigation for Synthetic Aperture Radar Based on Deep Residual Network" Remote Sensing 11, no. 14: 1654. https://doi.org/10.3390/rs11141654
APA StyleFan, W., Zhou, F., Tao, M., Bai, X., Rong, P., Yang, S., & Tian, T. (2019). Interference Mitigation for Synthetic Aperture Radar Based on Deep Residual Network. Remote Sensing, 11(14), 1654. https://doi.org/10.3390/rs11141654