Oil Spill Segmentation in Ship-Borne Radar Images with an Improved Active Contour Model


Abstract
:1. Introduction
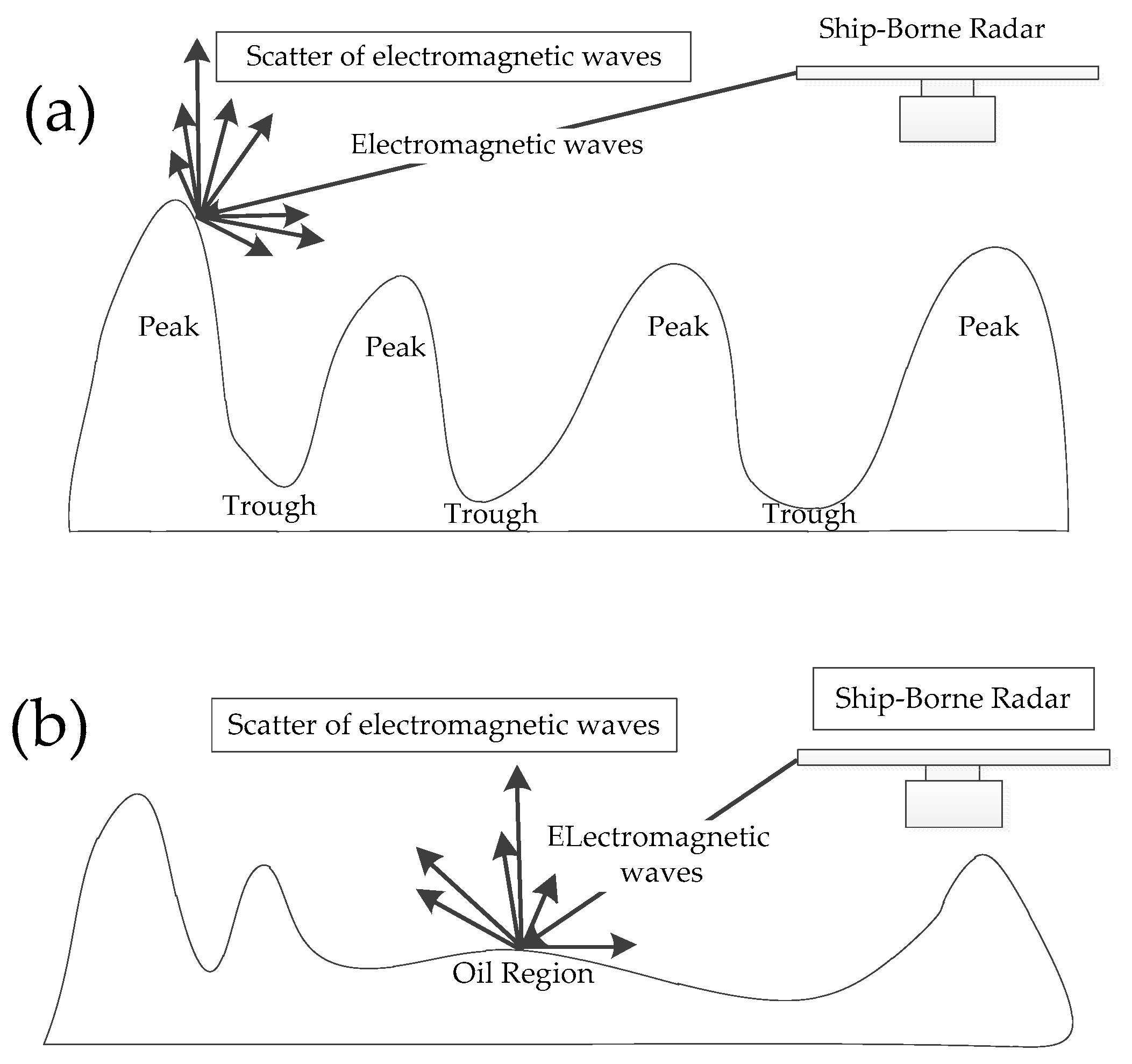
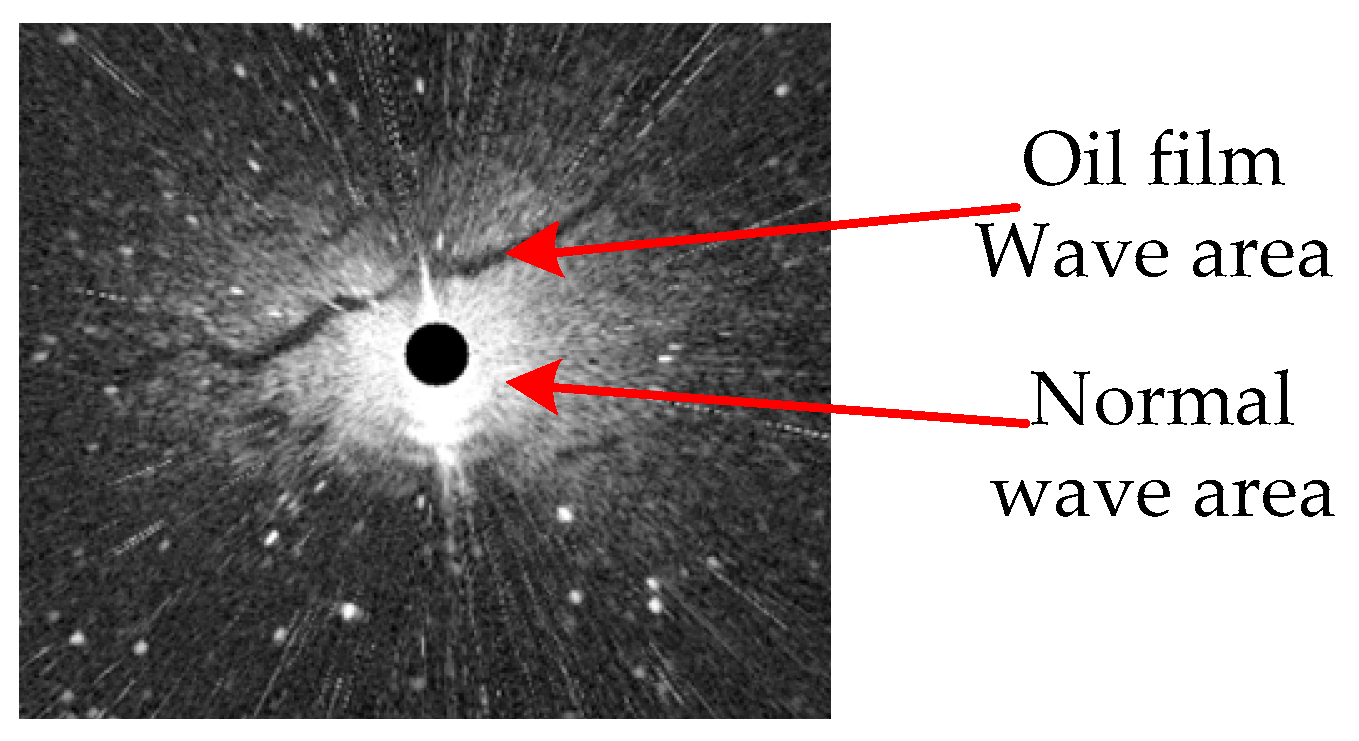
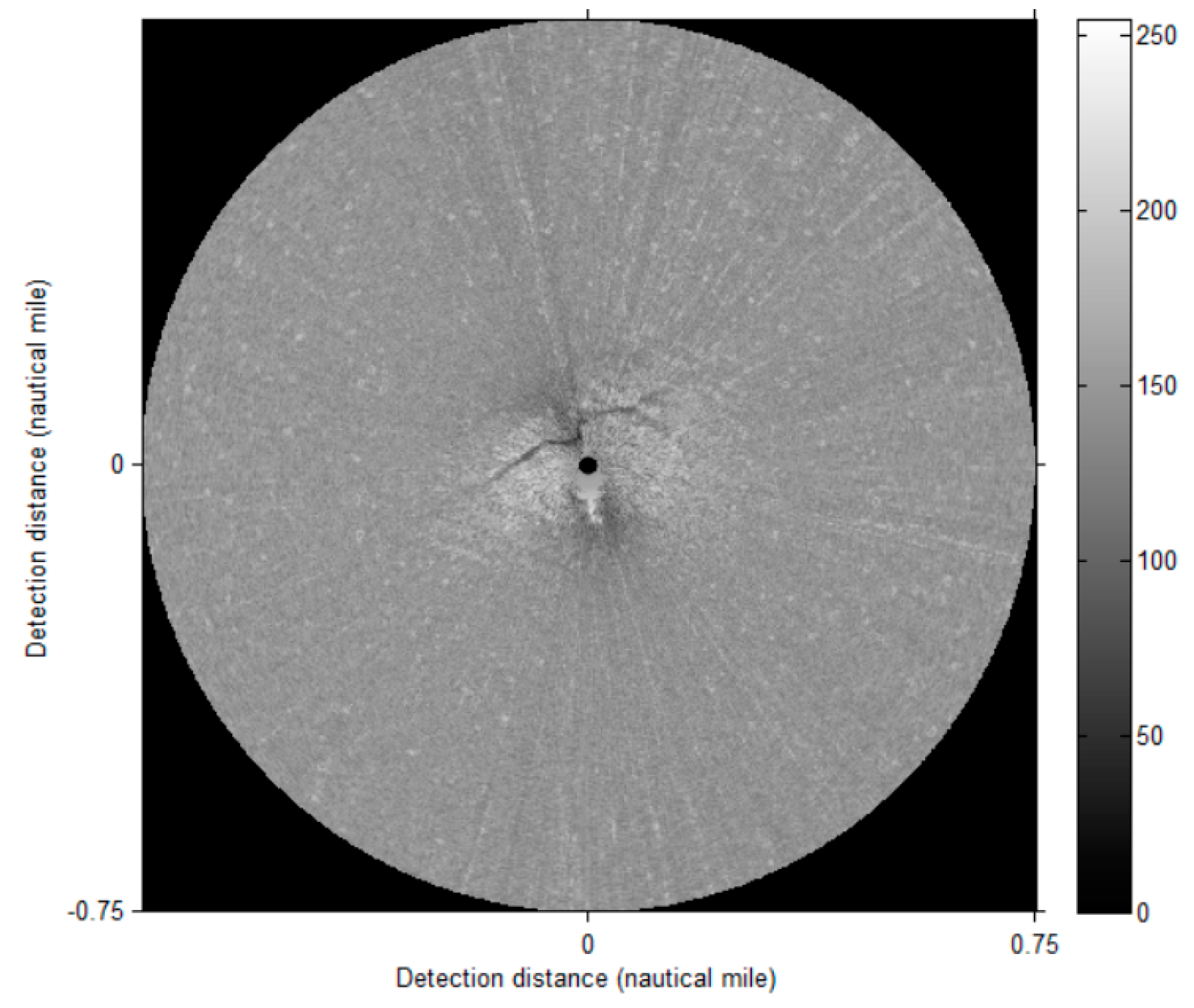
2. Ship-Borne Radar Oil Spill Imaging
3. Classical ACMs
3.1. C-V Model
3.2. LBF Model
3.3. LGIF Model
3.4. LIF Model
4. Materials and Methods
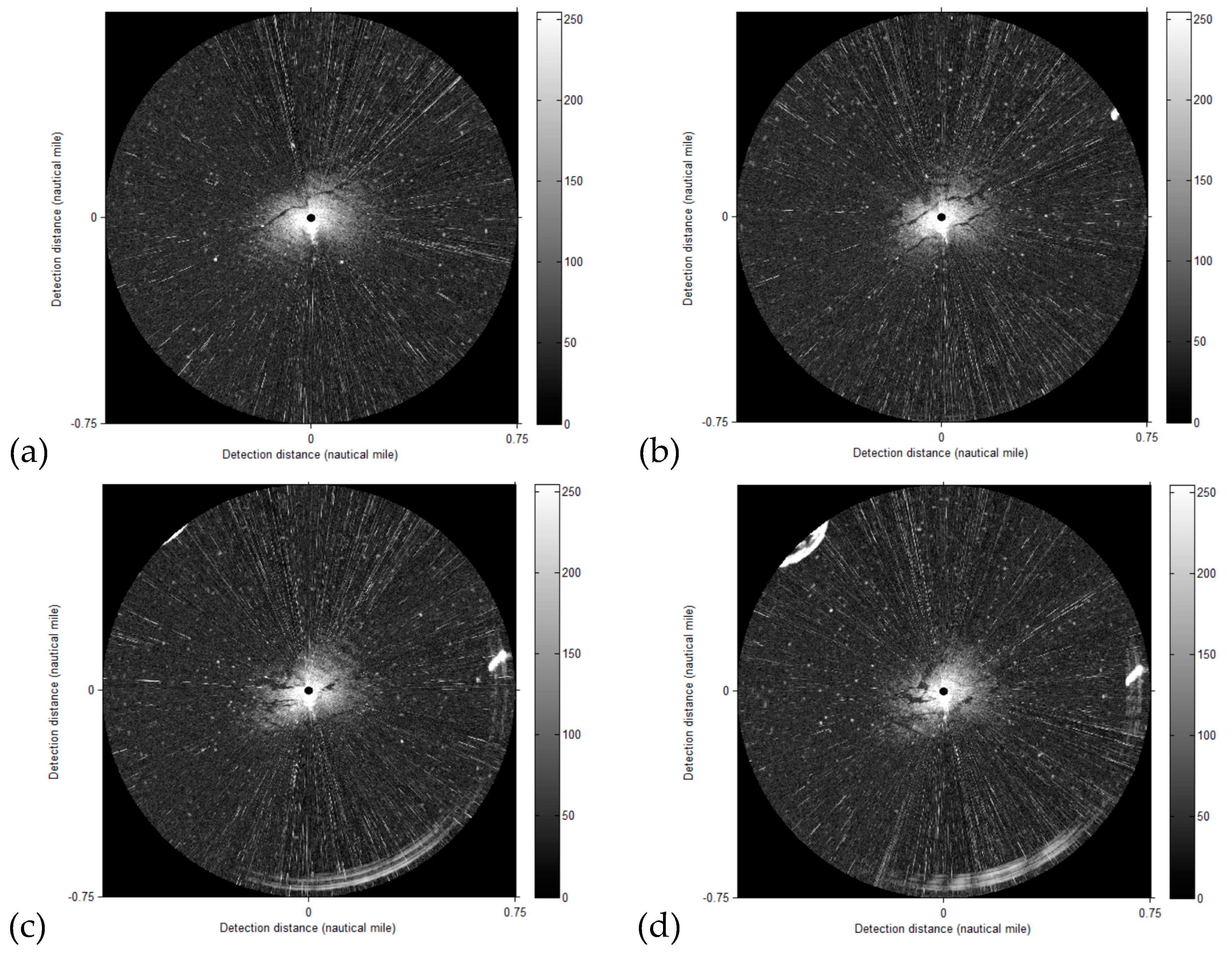
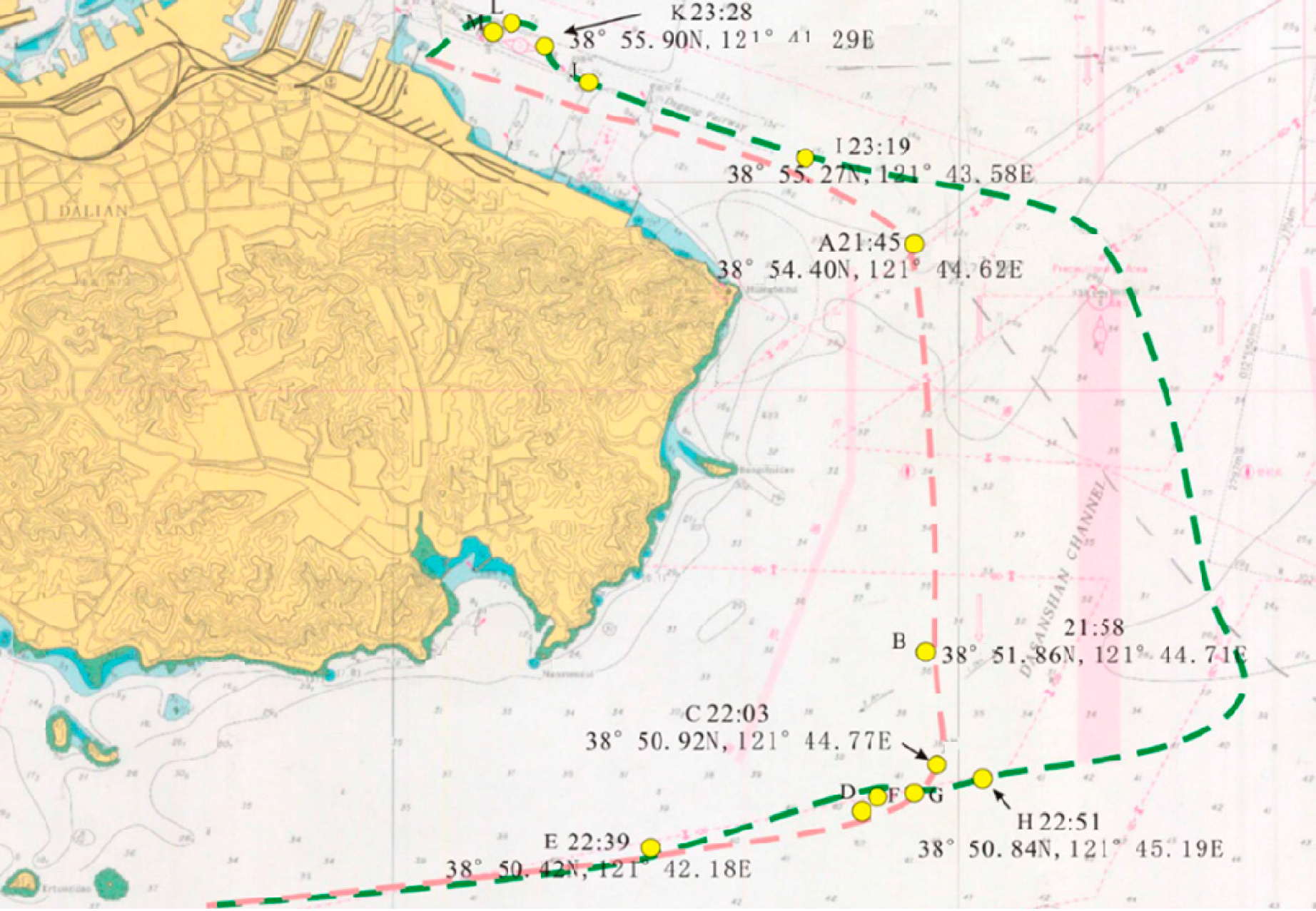
4.1. Data
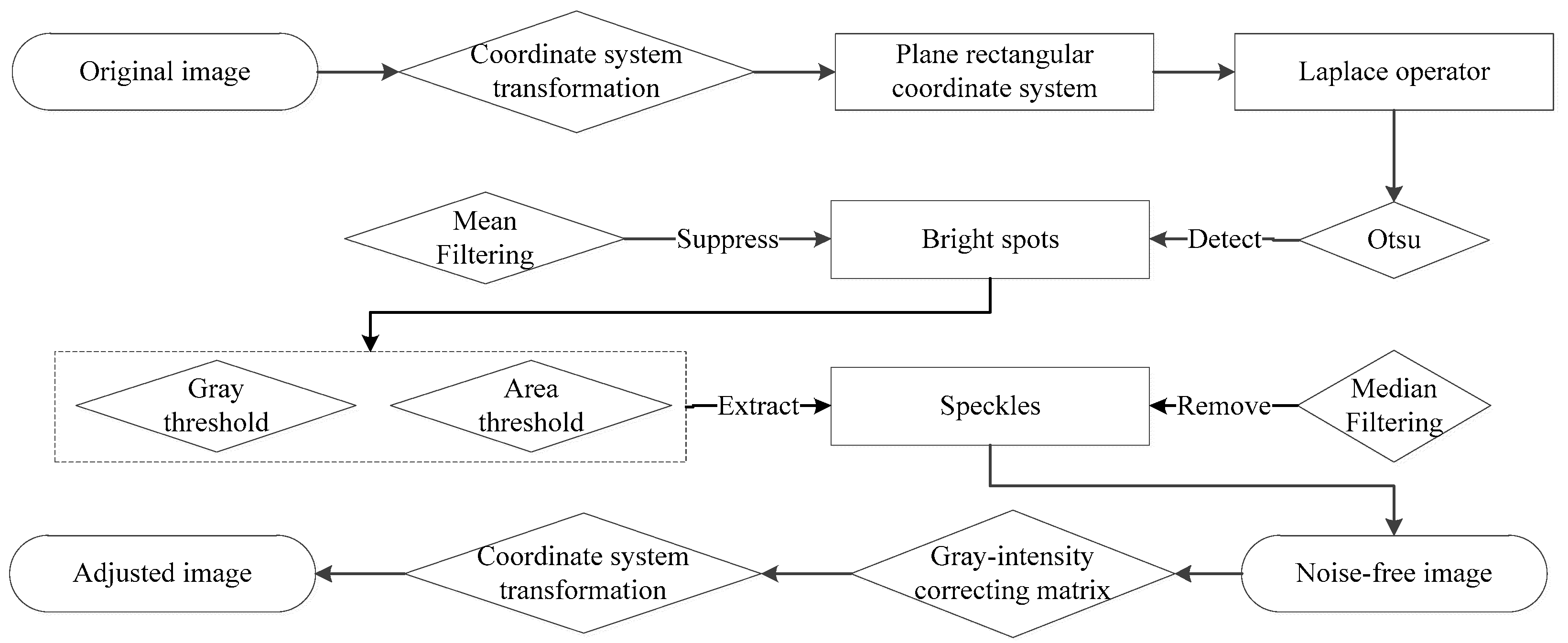
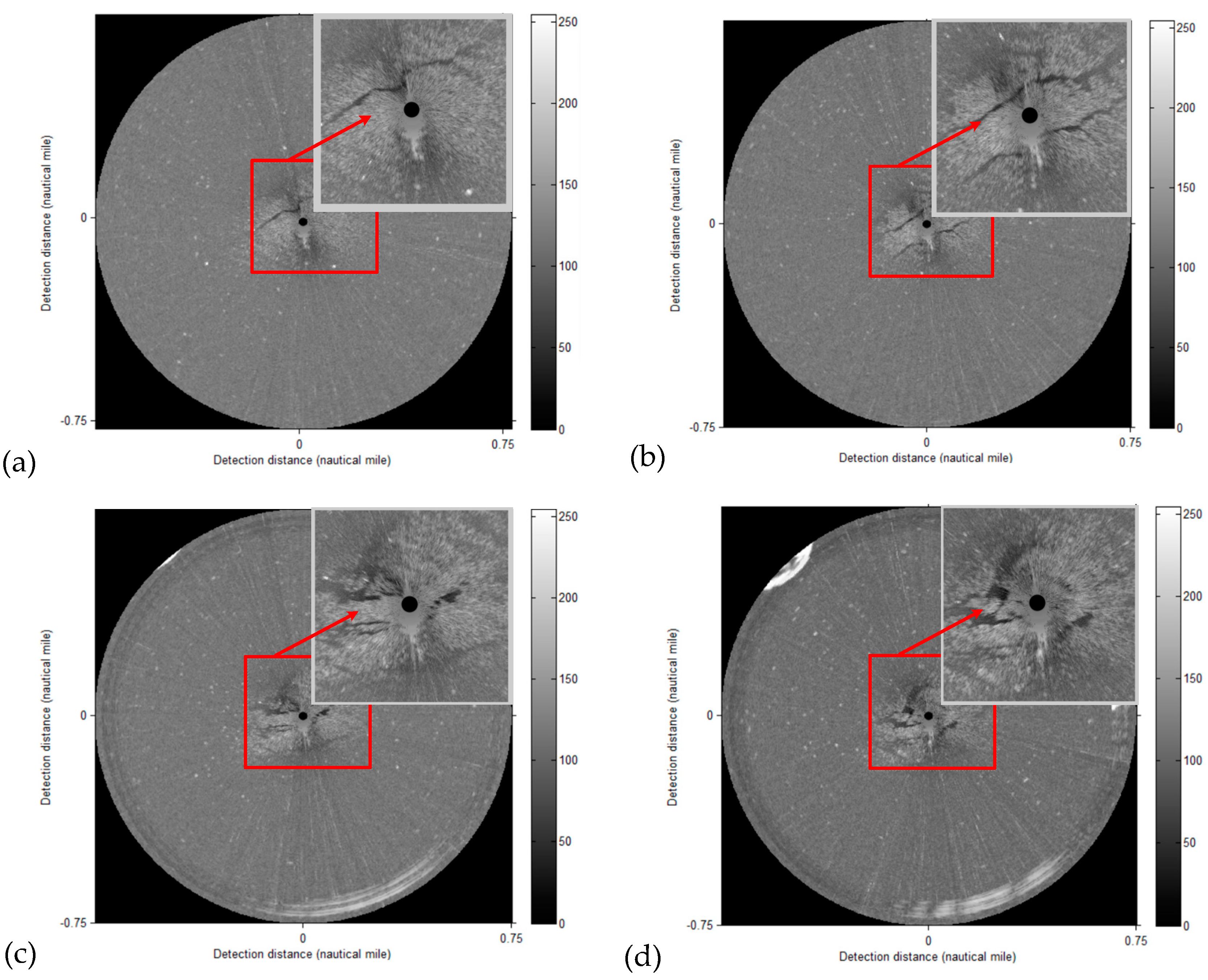
4.2. Image Pre-Processing
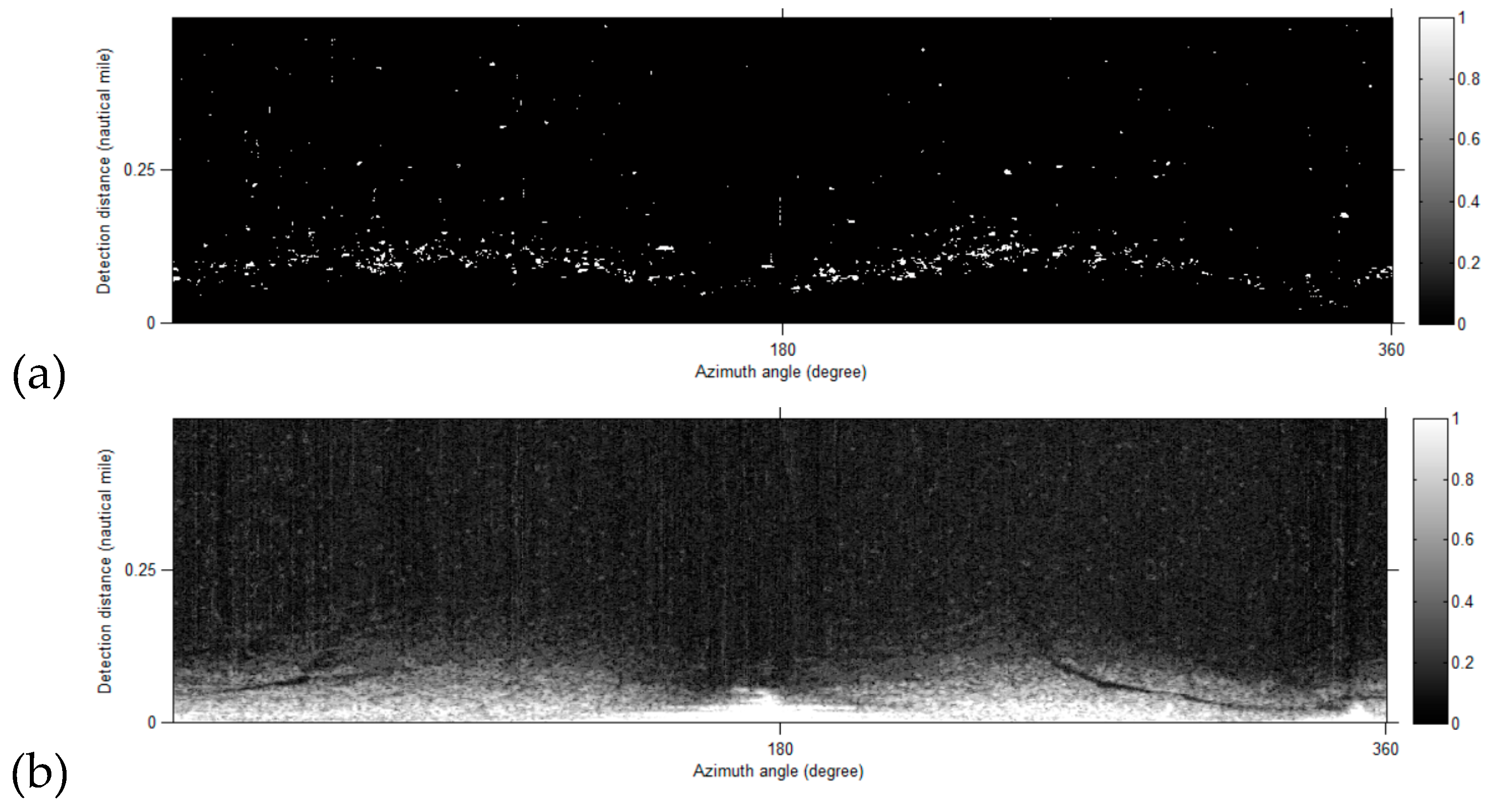
4.2.1. Smoothing of Co-Channel Interference and Bright Spots
4.2.2. Suppression of Other Noise
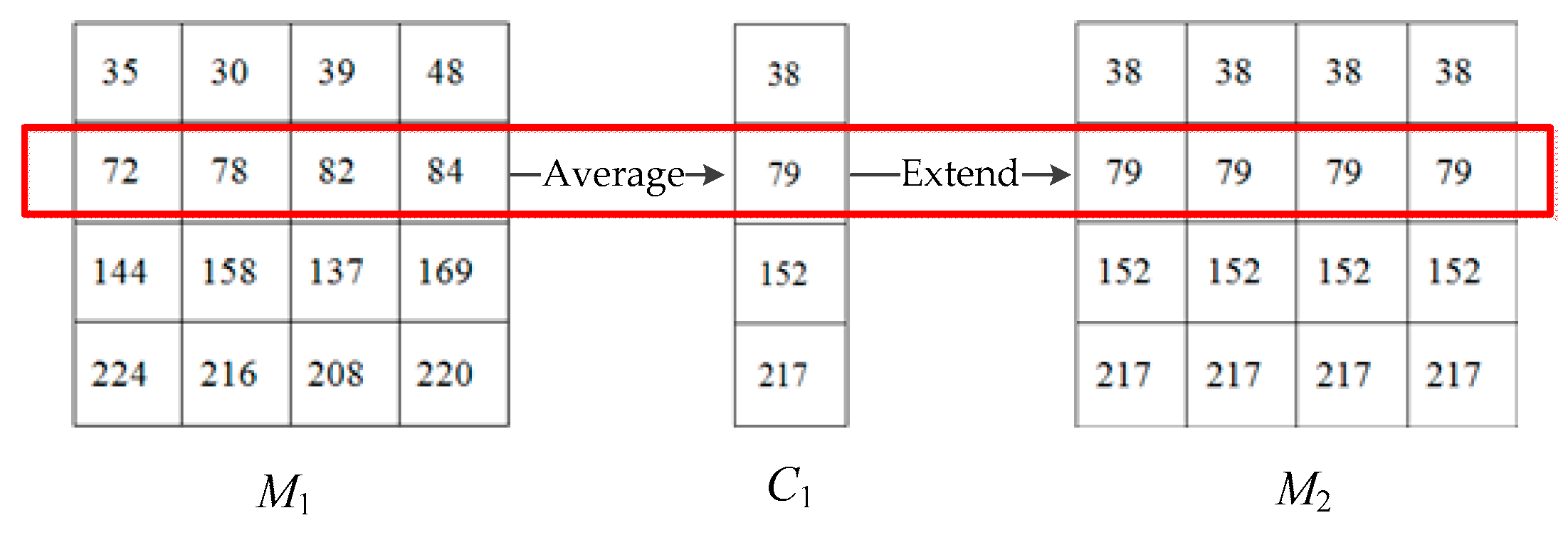
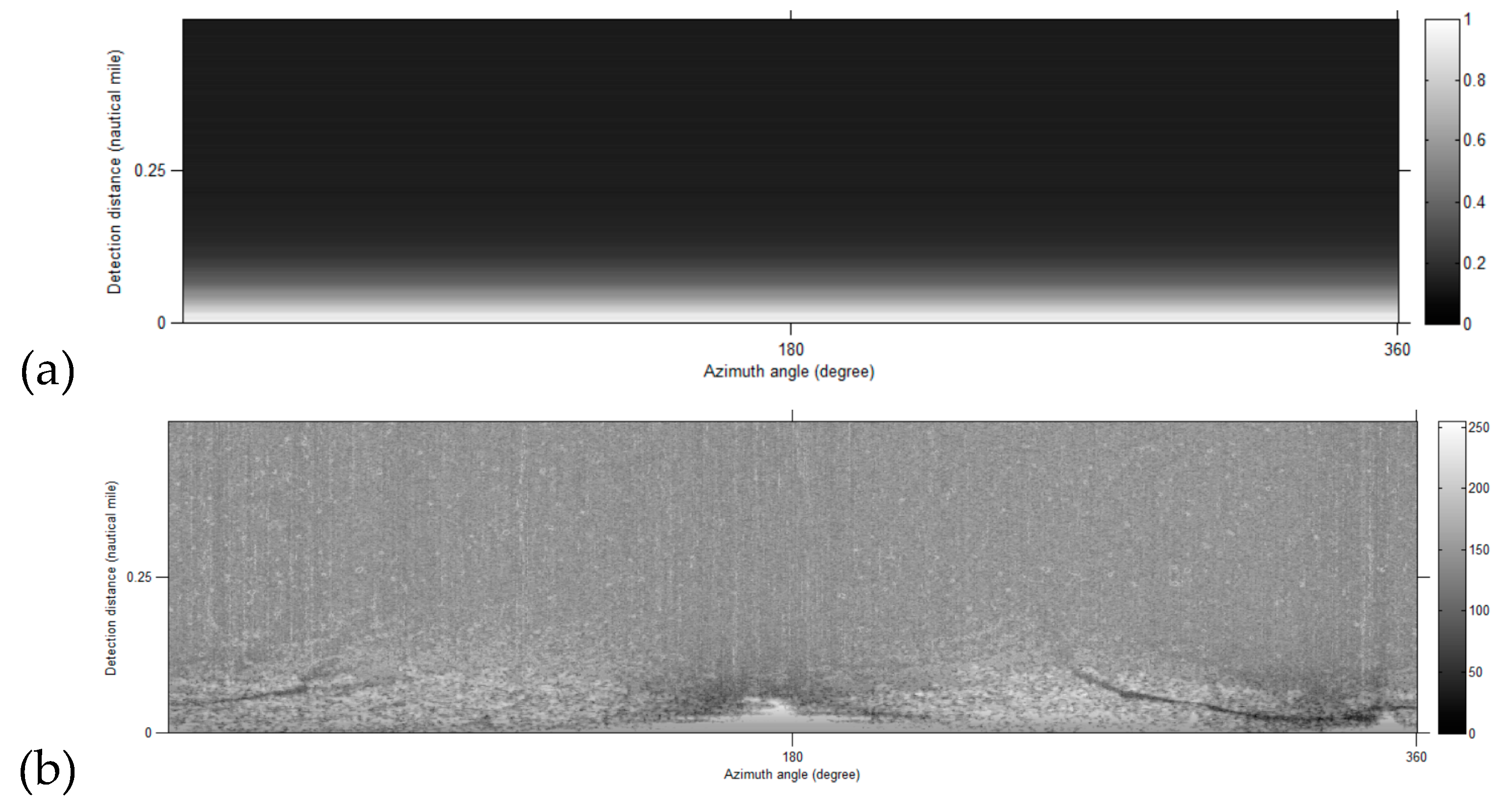
4.2.3. Image Rectification
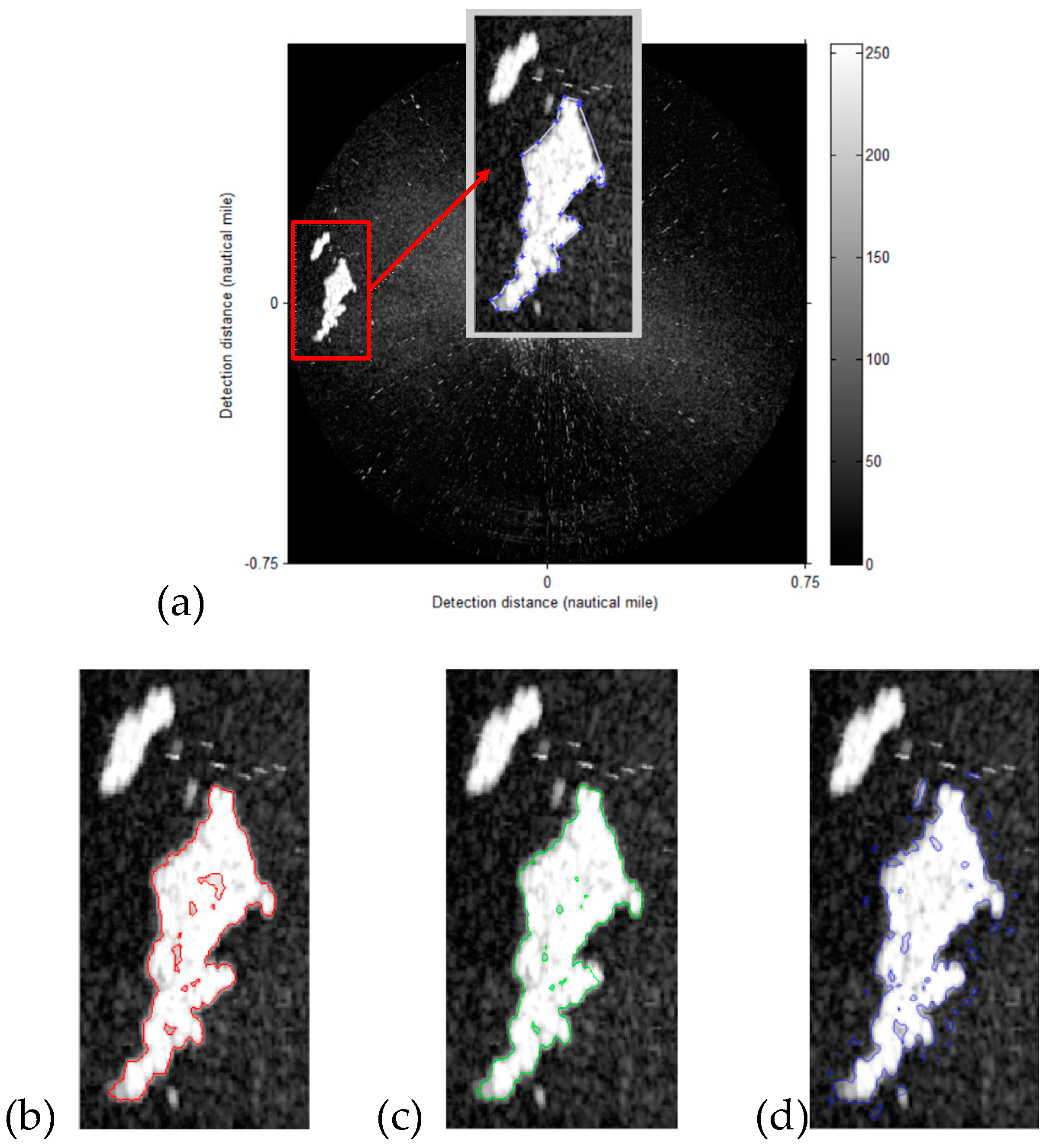
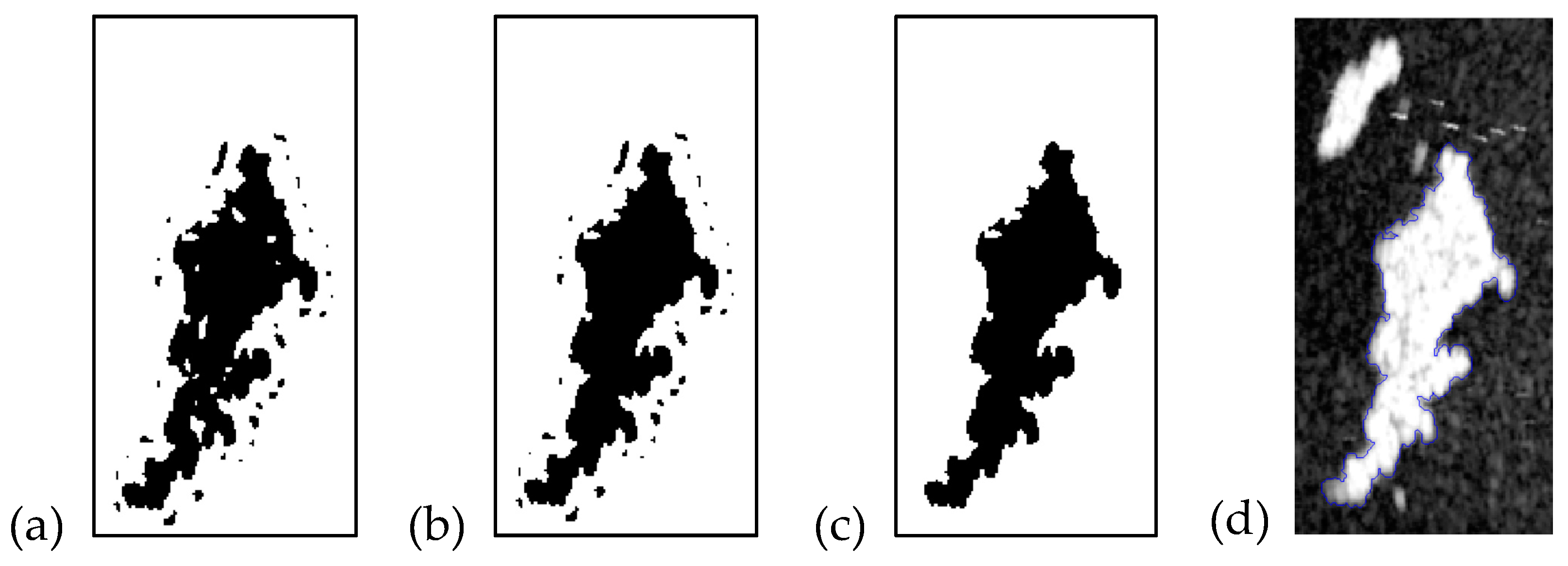
4.3. Proposed Method
5. Results and Discussion
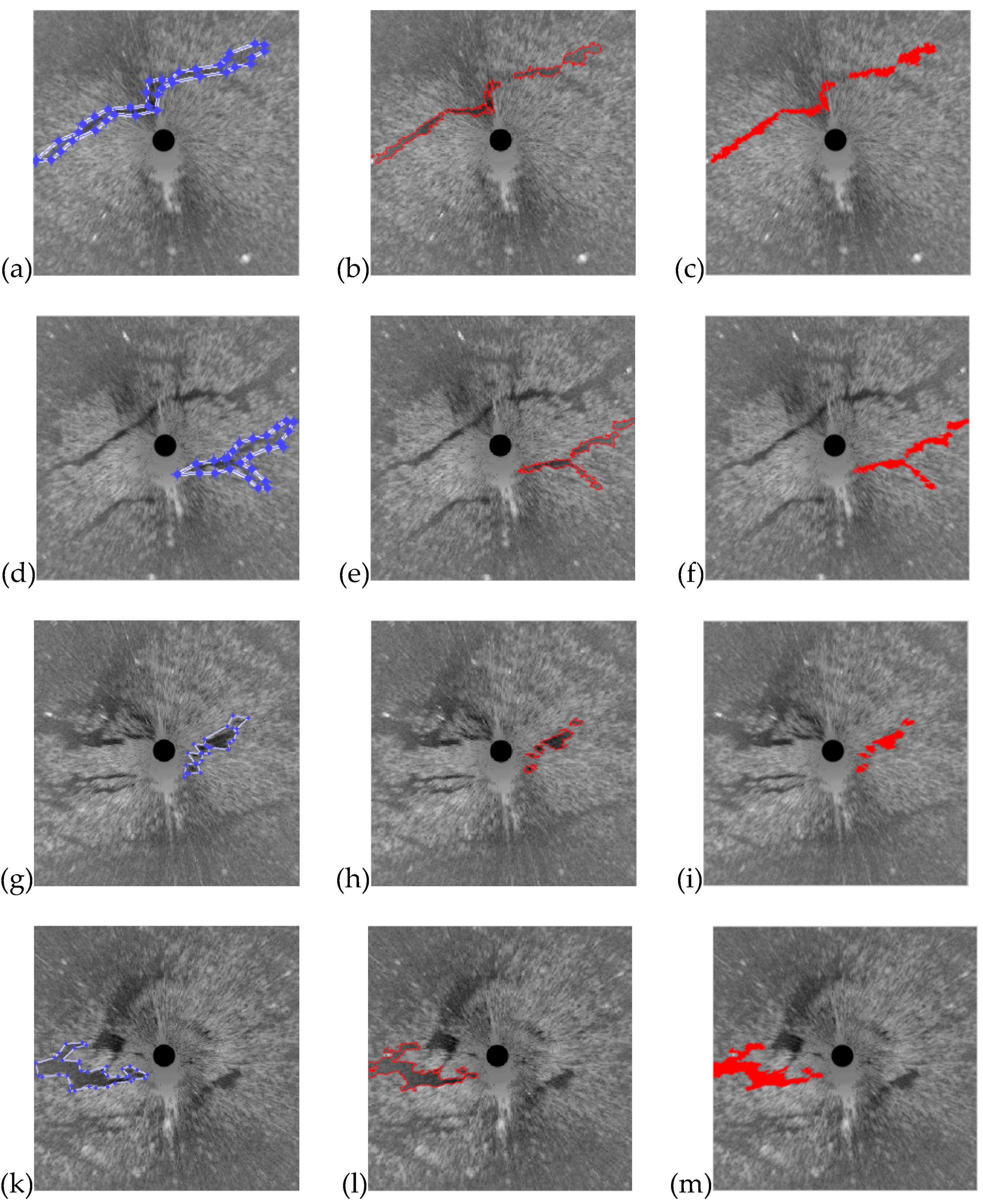
5.1. Results
5.2. Verification
5.3. Limitations of Ship-Borne Radar Oil Spill Monitoring Technology
5.4. Comparison with Other ACMS
5.5. Parameter Choices
5.6. Applicability of Whole Oil Films
5.7. Comparison with Other Methods
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Migliaccio, M.; Gambardella, A.; Tranfaglia, M. SAR Polarimetry to Observe Oil Spills. IEEE Trans. Geosci. Remote Sens. 2007, 45, 506–511. [Google Scholar] [CrossRef]
- Nunziata, F.; Macedo de, C.R.; Buono, A.; Velotto, D.; Migliaccio, M. On the analysis of a time series of X–band TerraSAR–X SAR imagery over oil seepages. Int. J. Remote Sens. 2019, 40, 3623–3646. [Google Scholar] [CrossRef]
- Yang, J.; Jin, S.; Xiao, X.; Jin, C.; Xia, C.; Lia, X.; Wang, S. Local Climate Zone Ventilation and Urban Land Surface Temperatures: Towards a Performance-based and Wind-sensitive Planning Proposal in Megacities. Sustain. Cities Soc. 2019, 47, 1–11. [Google Scholar] [CrossRef]
- Yang, J.; Wang, C.; Xiao, X.; Jin, C.; Xia, J.; Li, X. Spatial differentiation of urban wind and thermal environment in different grid sizes. Urban Clim. 2019, 28, 100458. [Google Scholar] [CrossRef]
- Tzannatos, E.; Xirouchakis, A. Techno-economic assessment of hull-mounted sonar for oil-spill risk Control. J. Navig. 2013, 66, 625–636. [Google Scholar] [CrossRef]
- Hsu, W.; Lian, S.; Huang, S. Risk assessment of operational safety for oil tankers—A revised risk matrix. J. Navig. 2017, 70, 775–788. [Google Scholar] [CrossRef]
- Gambardella, A.; Giacinto, G.; Migliaccio, M.; Montali, A. One-class classification for oil spill detection. Pattern Anal. Appl. 2010, 13, 349–366. [Google Scholar] [CrossRef]
- Yang, J.; Guan, Y.; Xia, J.; Jin, C.; Li, X. Spatiotemporal variations in greenspace ecosystem service value at urban fringes: A case study on Ganjingzi District in Dalian, China. Sci. Total Environ. 2018, 639, 1453–1461. [Google Scholar] [CrossRef]
- Carvalho, G.; Minnett, P.; Miranda, F.D.; Landau, L.; Paes, E. Exploratory data analysis of Synthetic Aperture Radar (SAR) measurements to distinguish the sea surface expressions of naturally-occurring oil seeps from human-related oil spills in Campeche Bay (Gulf of Mexico). Int. J. Geo Inf. 2017, 6, 379. [Google Scholar] [CrossRef]
- Cao, Y.; Xu, L.; Clausi, D. Exploring the potential of active learning for automatic identification of marine oil spills using 10-Year (2004–2013) RADASAT data. Remote Sens. 2017, 9, 1041. [Google Scholar] [CrossRef]
- Chen, G.; Li, Y.; Sun, G.; Zhang, Y. Application of deep networks to oil spill detection using polarimetric Synthetic Aperture Radar images. Appl. Sci. 2017, 7, 968. [Google Scholar] [CrossRef]
- Guo, H.; Wu, D.; An, J. Discrimination of oil slicks and lookalikes in polarimetric SAR images using CNN. Sensors 2017, 17, 1837. [Google Scholar] [CrossRef] [PubMed]
- Song, D.; Ding, Y.; Li, X.; Zhang, B.; Xu, M. Ocean oil spill classification with RADARSAT-2 SAR based on an Optimized Wavelet Neural Network. Remote Sens. 2017, 9, 799. [Google Scholar] [CrossRef]
- Lupidi, A.; Staglianò, D.; Martorella, M.; Berizzi, F. Fast detection of oil spills and ships using SAR images. Remote Sens. 2017, 9, 230. [Google Scholar] [CrossRef]
- Angelliaume, S.; Ceamanos, X.; Viallefontrobinet, F.; Baqué, R.; Déliot, P. Hyperspectral and radar airborne imagery over controlled release of oil at sea. Sensors 2017, 17, 428. [Google Scholar] [CrossRef] [PubMed]
- Jones, C.E.; Holt, B. Experimental L-band airborne SAR for oil spill response at sea and in coastal waters. Sensors 2018, 18, 641. [Google Scholar] [CrossRef]
- Gallego, A.J.; Gil, P.; Pertusa, A.; Fisher, R.B. Segmentation of oil spills on side-looking airborne radar imagery with autoencoders. Sensors 2018, 18, 797. [Google Scholar] [CrossRef]
- Tennyson, E.J. Shipboard navigational radar as an oil spill tracking tool-a preliminary assessment. In Proceedings of the OCEANS 1988, Baltimore, MD, USA, 31 October–2 November 1988; pp. 857–859. [Google Scholar] [CrossRef]
- Atanassov, V.; Mladenov, L.; Rangelov, R.; Savchenko, A. Observation of oil slicks on the sea surface by using marine navigation radar. In Proceedings of the IGARSS 1991, Espoo, Finland, 3–6 June 1991; pp. 1323–1326. [Google Scholar] [CrossRef]
- Gangeskar, R. Automatic oil-spill detection by marine X-band radars. Sea Technol. 2004, 45, 40–45. [Google Scholar] [CrossRef]
- Chu, X.L.; Ming, X.U.; Wang, F.; Wang, J. Analysis of the wave information extracted by X-band radar. Period. Ocean Univ. China 2011, 41, 110–113. [Google Scholar]
- Nost, E.; Egset, C.N. Oil spill detection system—Results from field trials. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–21 September 2006. [Google Scholar] [CrossRef]
- Egset, C.N.; Nost, E. Oil spill detection system based on marine X-band radar. Sea Technol. 2007, 48, 41–45. [Google Scholar]
- Zhu, X.; Li, Y.; Feng, H.; Liu, B.; Xu, J. Oil spill detection method using X-band marine radar imagery. J. Appl. Remote Sens. 2015, 9, 095985. [Google Scholar] [CrossRef]
- Liu, P.; Li, Y.; Xu, J.; Zhu, X. Adaptive enhancement of X-band marine radar imagery to detect oil spill segments. Sensors 2017, 17, 2349. [Google Scholar] [CrossRef]
- Xu, J.; Liu, P.; Wang, H.; Lian, J.; Li, B. Marine radar oil spill monitoring technology based on Dual-threshold and C–V level set methods. Indian Soc. Remote Sens. 2018, 46, 1949–1961. [Google Scholar] [CrossRef]
- Xu, J.; Cui, C.; Feng, H.Y.; You, D.M.; Wang, H.X.; Li, B. Marine Radar Oil-Spill Monitoring through Local Adaptive Thresholding. Environ. Forensics 2019, 20, 196–209. [Google Scholar] [CrossRef]
- Zhang, X.; Xiong, B.; Dong, G.; Kuang, G. Ship segmentation in SAR images by improved nonlocal active contour model. Sensors 2018, 18, 4220. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Wen, X.; Meng, Q.; Xu, H.; Yuan, L. Synthetic aperture radar image segmentation with reaction diffusion level set evolution equation in an active contour model. Remote Sens. 2018, 10, 906. [Google Scholar] [CrossRef]
- Kass, M.; Witkin, A.; Terzopoulos, D. Snakes: Active contour models. Int. J. Comput. Vis. 1988, 1, 321–331. [Google Scholar] [CrossRef]
- Xu, C.; Prince, J.L. Snakes, shapes, and gradient vector flow. IEEE Trans. Image Process. 1998, 7, 359–369. [Google Scholar] [CrossRef]
- Xu, C.; Prince, J.L. Generalized gradient vector flow external forces for active contours. Signal Process. 1998, 71, 131–139. [Google Scholar] [CrossRef] [Green Version]
- Caselles, V.; Kimmel, R.; Sapiro, G. Geodesic active contours. Int. J. Comput. Vis. 1997, 22, 61–79. [Google Scholar] [CrossRef]
- Chan, T.F.; Vese, L.A. Active contours without edges. IEEE Trans. Image Process. 2001, 10, 266–277. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mumford, D.; Shah, J. Optimal approximation by piecewise smooth function and associated variational problems. Commun. Pure Appl. Math. 1989, 42, 577–685. [Google Scholar] [CrossRef]
- Vese, L.A.; Chan, T.F. A multiphase level set framework for image segmentation using the Mumford and Shah model. Int. J. Comput. Vis. 2002, 50, 271–293. [Google Scholar] [CrossRef]
- Li, C.M.; Kao, C.Y.; Gore, J.C.; Ding, Z. Minimization of regionscalable fitting energy for image segmentation. IEEE Trans. Image Process. 2008, 17, 1940–1949. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Li, C.; Sun, Q.; Xia, D.; Kao, C. Active contours driven by local and global intensity fitting energy with application to brain MR image segmentation. Comput. Med. Imaging Graph. 2009, 33, 520–531. [Google Scholar] [CrossRef]
- Wang, L.; He, L.; Mishra, A.; Li, C. Active contours driven by local Gaussian distribution fitting energy. Signal Process 2009, 89, 2435–2447. [Google Scholar] [CrossRef]
- Thieu, Q.; Luong, M.; Rocchisani, J.; Sirakov, N.M.; Viennet, E. Efficient segmentation with the convex local-global fuzzy Gaussian distribution active contour for medical applications. Ann. Math. Artif. Intell. 2015, 75, 249–266. [Google Scholar] [CrossRef]
- Zhang, K.H.; Song, H.H.; Zhang, L. Active contours driven by local image fitting energy. Pattern Recognit. 2010, 43, 1199–1206. [Google Scholar] [CrossRef]
- Fingas, M.; Brown, C.E. A review of oil spill remote sensing. Sensors 2018, 18, 91. [Google Scholar] [CrossRef]
- Brekke, C.; Solberg, A.H.S. Oil spill detection by satellite remote sensing. Remote Sens. Environ. 2005, 95, 1–13. [Google Scholar] [CrossRef]
- Ji, Z.X.; Xia, Y.; Sun, Q.S.; Gao, G.; Chen, Q. Active contours driven by local likelihood image fitting energy for image segmentation. Inf. Sci. 2015, 301, 285–304. [Google Scholar] [CrossRef]
- Sun, L.; Meng, X.; Xu, J.; Tian, Y. An Image Segmentation Method Using an Active Contour Model Based on Improved SPF and LIF. Appl. Sci. 2018, 8, 2576. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Band | X-band |
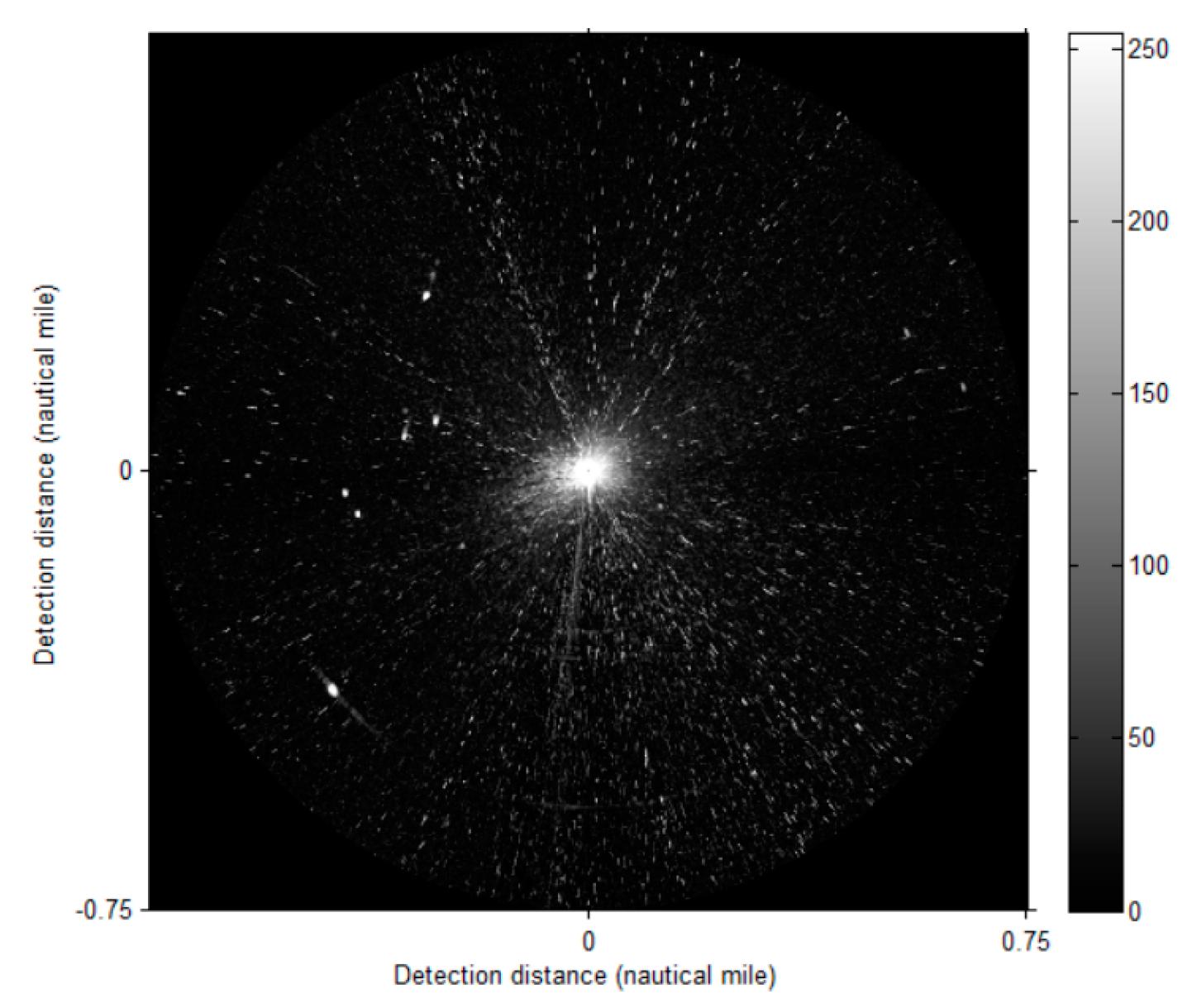
| Detection distance | 0.5/0.75/1.5/3/6/12/24 NMs |
| Range resolution | 3.75 m |
| Antenna type | Waveguide split antenna |
| Polarization mode | Horizontal |
| Horizontal detection angle | 360° |
| Rotation speed | 28–45 revolutions/min |
| Length of antenna | 8 ft |
| Pulse recurrence frequency | 3000 Hz/1800 Hz/785 Hz |
| Pulse width | 50 n/250 ns/750 ns |
| Figure ID | Pixel Area of Oil-Films | Area of Oil-Films (m2) |
|---|---|---|
| Figure 12c | 1413 | 10,399.7 |
| Figure 12f | 883 | 6498.9 |
| Figure 12i | 418 | 3076.5 |
| Figure 12m | 1420 | 10,451.2 |
| ACMs | LBF | LGIF | LIF | |
|---|---|---|---|---|
| Contrasting Term | ||||
| Execution time (s) | 0.547 | 0.750 | 0.072 | |
| Area of segmentation (number of pixels) | 1369 | 1225 | 1721 | |
| i | 5 | 10 | 20 | |
|---|---|---|---|---|
| σ | ||||
| 2 | 0.425 | 0.769 | 1.367 | |
| 5 | 0.478 | 0.866 | 1.55 | |
| 10 | 0.744 | 1.252 | 2.515 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, J.; Wang, H.; Cui, C.; Liu, P.; Zhao, Y.; Li, B. Oil Spill Segmentation in Ship-Borne Radar Images with an Improved Active Contour Model. Remote Sens. 2019, 11, 1698. https://doi.org/10.3390/rs11141698
Xu J, Wang H, Cui C, Liu P, Zhao Y, Li B. Oil Spill Segmentation in Ship-Borne Radar Images with an Improved Active Contour Model. Remote Sensing. 2019; 11(14):1698. https://doi.org/10.3390/rs11141698
Chicago/Turabian StyleXu, Jin, Haixia Wang, Can Cui, Peng Liu, Yang Zhao, and Bo Li. 2019. "Oil Spill Segmentation in Ship-Borne Radar Images with an Improved Active Contour Model" Remote Sensing 11, no. 14: 1698. https://doi.org/10.3390/rs11141698
APA StyleXu, J., Wang, H., Cui, C., Liu, P., Zhao, Y., & Li, B. (2019). Oil Spill Segmentation in Ship-Borne Radar Images with an Improved Active Contour Model. Remote Sensing, 11(14), 1698. https://doi.org/10.3390/rs11141698