1. Introduction
Land resources worldwide are being irreversibly reduced and degraded because of anthropogenic pressures, variations in land use patterns and climate change [
1,
2]. An important example is soil salinization, which constitutes one of the most widespread soil degradation processes on Earth [
3,
4]. The coastal saline soil of the Yellow River Delta (YRD) is an important land resource in China and as a result of various factors, saline soil is broadly distributed throughout the YRD with a salt content that changes frequently [
5]. These conditions negatively impact the regional agricultural sustainability and environmental health and may trigger severe losses of soil productivity and, ultimately, cause desertification [
6,
7,
8,
9]. As a result, to ensure the proper utilization of land resources and to protect the ecological environment, it is urgently necessary to monitor soil salinity (SS) in the YRD in real time [
10].
Traditional soil salinity monitoring methods involve the acquisition of field measurements. However, with their introduction in the 1990s, remote sensing and geographic information system (GIS) technologies initiated a new era in which soil salinity could be dynamically monitored on a large scale [
11,
12,
13,
14,
15]. Because satellite platforms can provide massive quantities of information over large spatial areas at low cost and at frequent intervals, satellite remote sensing has gradually replaced traditional soil salinity monitoring methods, which are inefficient and expensive [
16]. However, satellites exhibit various disadvantages, such as fixed orbits and long revisit periods and satellite data suffer from atmospheric effects, especially low spatial resolution [
17]; thus, it is difficult to perform high-precision, real-time inversions in the field.
In recent years, the technology of unmanned aerial vehicles (UAVs) has gradually been integrated into the civil field, becoming a popular subject of practical agricultural research and applications [
18]. Compared with traditional measurement methods, UAV remote sensing provides a nondestructive and cost-effective approach for rapid soil salinity monitoring. Compared with other remote sensing platforms (i.e., satellites), UAV platforms are easier to build, can fly at lower altitudes and over different types of areas and can capture images with high spatial and temporal resolution [
19,
20]. Consequently, UAV technology has been widely used in agriculture [
21,
22,
23,
24,
25]. However, the current UAV technology still exhibits some limitations. For example, compared with satellites, UAVs are unsuitable for the acquisition of imagery on a large scale [
26]. In addition, UAVs are not permitted in certain areas due to privacy concerns. Therefore, although an inversion model base on UAV imagery boasts a higher accuracy, satellite remote sensing remains the best source of basic imagery when acquiring information over a large region.
Scholars have conducted research on the application of multisource data and generated good results [
27,
28,
29]. However, most data sources are the synergies of radar and optical data and the combination of various satellite remote sensing data. Most of the research objects focus on vegetation canopy parameters. Accordingly, the harmonious use of satellite, UAV and ground data should be rare and feasible and is thus worthy of further research.
In this study, considering the factors discussed above, representative regions of the YRD—namely, the Hekou District and Kenli District—which possess coastal saline soil were chosen as the study areas in which to perform the following: (1) construct inversion models of the soil salinity based on UAV imagery and field-measured data and select the best model; (2) use the relationship between the reflectance of UAV and satellite images to normalize the reflectance of satellite images; and (3) apply the best inversion model to the normalized satellite imagery to achieve scaled-up soil salinity inversions.
The advantages of ground-measured, UAV and satellite methods were fully harmonized in this study. In addition, the scale, precision and spatial-temporal resolutions of soil salinity inversions were improved.
2. Data and Methods
The data sources in this paper include satellite, UAV and ground-measured data. When building the UAV-based model, a ground sampling data point corresponds to a pixel of UAV imagery. When building the satellite-based model, a ground sampling point data corresponds to a pixel of satellite imagery. The method for building the satellite-based model is the same as that used for the UAV-based model, as shown in
Section 2.2. When calculating the normalization coefficient of reflectivity of the satellite images, there are approximately 1600 UAV image pixels corresponding to a satellite image pixel of the same area.
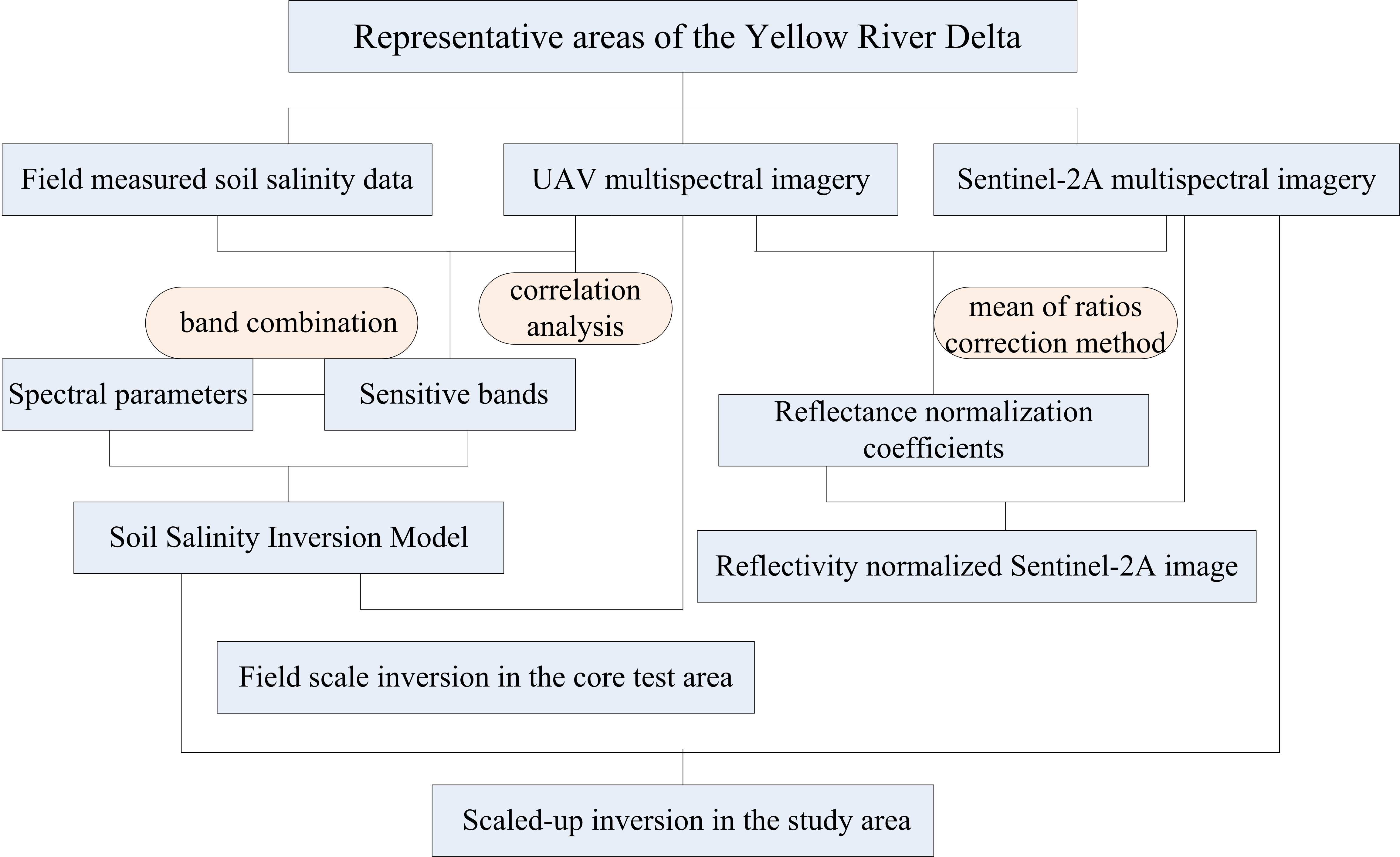
2.1. Study Area
The study area is located in the representative region of the YRD, namely, the Hekou District (37°45′~38°10′ N, 118°07′~119°05’ E) and the Kenli District (37°24′~38°10′ N, 118°15′~119°19’ E). The study area exhibits a warm temperate continental monsoon climate that is dry and windy in spring [
30]. Evaporation in spring far exceeds precipitation, with an evaporation-precipitation ratio of 7.6; thus, the vegetation coverage in the study area is low, and the soil is subjected to serious seasonal salt return and salt accumulation. The terrain of the study area slopes slightly from the southwest to the northeast. Additionally, the groundwater table is shallow and highly mineralized. The main land use types are agricultural land and unused land and the main soil type is coastal (tidal) saline soil with a light texture and strong capillary action. Due to the above mentioned factors, the degree of soil salinization in the study area is high and saline soil is widely distributed [
31,
32]. These conditions seriously affect the development and utilization of regional land resources and the sustainable development of the social economy [
33].
A farm of the “Bohai Granary” project located in the Hekou District was selected as the core test area, in which field measurements were performed and a UAV flight test was carried out. The differences in the soil salt content throughout the core test area are obvious, and the field contains all salinization grades; thus, this field served as the foundation for the universality of the soil salinity inversion model. In addition, the Kenli District was chosen as the verification area to validate the inversion results from the UAV-based model on the satellite image after reflectance normalization (
Figure 1).
2.2. Data Acquisition and Preprocessing
2.2.1. Acquisition of Soil Salinity Data
In the core test area, 160 sampling points were established. The sampling points were selected based on the following factors: (1) the centers of observation areas that were spatially representative with identical land use types were taken as sampling points; (2) an observation area of 20 m × 20 m was covered; and (3) the crop type, crop growth and vegetation coverage in the agricultural land were all uniform. An EC110 portable salinity meter equipped with a 2225FS T series probe (in which the temperature correction for the electrical conductivity had already been completed) (Spectrum Technologies, Inc., USA) was used to make 5 measurements at and near the sampling points, with a range of no more than 5 cm × 5 cm. The measured value was the soil electrical conductivity (EC) in units of dS/m or mS/cm. The coordinates (longitude and latitude) of the sampling points were measured with a Trimble GEO 7X centimeter handheld differential GPS (DGPS)(Trimble inc. Sunnyvale, California, USA) with an accuracy of approximately 3~25 mm. Moreover, the coordinates of ten representative ground objects around the core test area were recorded as the ground control points (GCPs) during geometric correction. The sampling was conducted on 5–10 March 2018.
The soil salinity was determined from the regression equation derived by predecessors,
[
34], where SS represents the soil salinity in units of g/kg. The average soil salinity after repeated measurements was taken as the measured soil salinity at each sampling point.
In total, 69 sampling points were set up based on a random distribution of land use types in the whole validation area. The measured soil salinity values were significantly different, with different salinity degrees range from 1.34 g/kg to 9.52 g/kg. The factors governing the selection of the sampling area and the method of investigation were the same as those employed in the core test area. The survey was performed on the 25th to 27th April 2016.
2.2.2. Acquisition and Processing of UAV Imagery
A Sequoia multispectral camera was mounted on a Dajiang Matrice 600 Pro UAV (loaded mass: 5.5 kg; flying time: 16 min) ( SZ DJI Technology Co.,Ltd. Shenzhen, Guangdong province, China). The camera captures four bands: green, red, red-edge and near-infrared (
Table 1) [
35]. The UAV test was conducted from 13:00 to 14:00 each day from the 7th to 9th March 2018, in the core test area to obtain UAV imagery. The UAV hovered at a height of 100 m, the flight speed was 5 m/s, the image acquisition interval was set to 1.5 s and the area covered was approximately 1 km
2. During the process of taking photographs, the sunshine sensor equipped with the Sequoia could correct the illumination difference to calibrate the intrinsic radiation. By taking the whiteboard images by the Sequoia camera and loading the whiteboard images and whiteboard parameters corresponding to each band in the Pix4D software (Pix4D S.A. Route de Renens 241008 Prilly, Switzerland) before image mosaicking, extrinsic radiation calibration and spectral calibration were achieved.
Pix4D software was used to preprocess the UAV imagery, which included operations such as mosaicking, converting the data into surface reflectance and extrinsic radiation calibration. Finally, a multispectral orthophoto of the core test area was obtained with a resolution of 4~5 cm (
Figure 1D).
2.2.3. Acquisition and Processing of Sentinel-2A Satellite Data
The Sentinel series of satellites was launched by the European Space Agency (ESA) for the Copernicus Programme [
36]. Within the Sentinel series, Sentinel-2 consists of two optical satellites, namely, Sentinel-2A and Sentinel-2B. In this paper, the Sentinel-2A products were downloaded from the ESA Copernicus data sharing website (
https://scihub.copernicus.eu/). We selected images covering the study area that were acquired at the same time on the 1st May 2016, and the 1st March 2018.
The downloaded data are atmospheric reflectance data that have been geometrically corrected. Using the Sentinel Application Platform (SNAP) software provided by the ESA, atmospheric corrections and resampling were applied to the data and the data were exported in an ENVI format. Then, the software ENVI 5.1 (Exelis Visual Information Solutions company, USA) was employed to mosaic the data, extract the reflectivity, perform image clipping, inversion, and classification and then to output the image.
Sentinel-2A provides multispectral data with 13 bands. Considering the consistency between the Sentinel-2A and UAV data and the requirements for building a soil salinity model, the satellite bands that are consistent with the wavelength range of the Sequoia camera were selected, as shown in
Table 1.
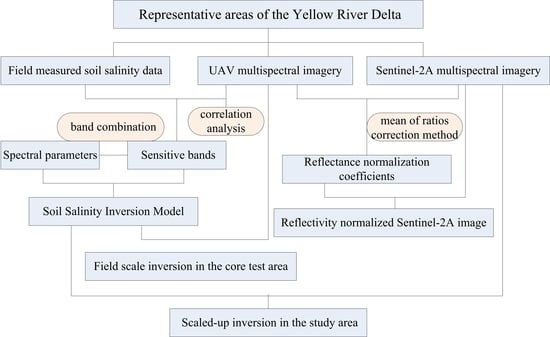
2.3. Soil Salinity Inversion Model Based on UAV Imagery
Soil salinity inversion models were constructed by analyzing the field-measured soil salinity data and UAV imagery. The ground sampling points and pixels of UAV imagery share a one-to-one correspondence, and they were divided into a modeling set and a validation set at a ratio of 2:1.
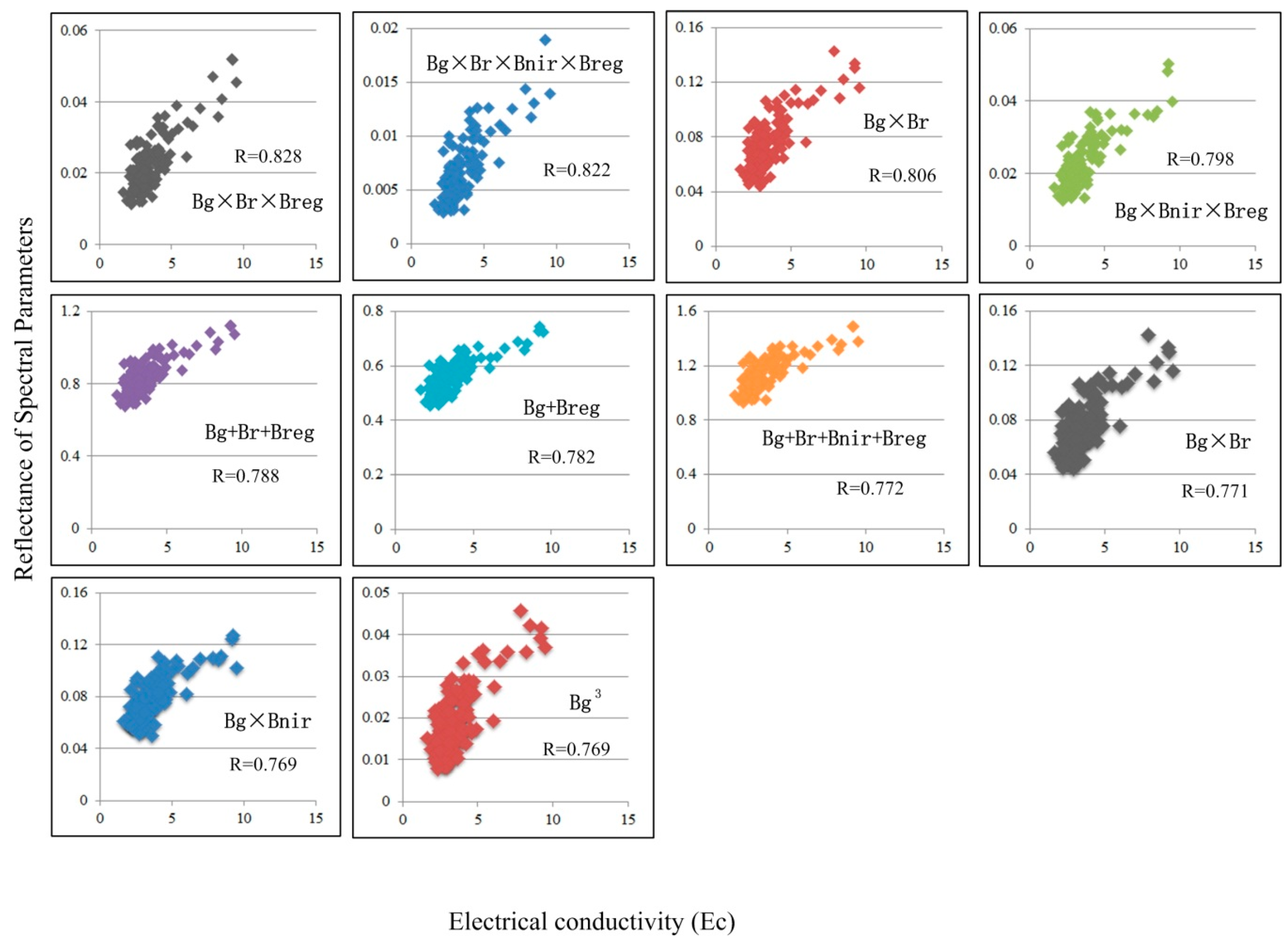
First, a relevance analysis between all field-measured and UAV data was performed, after which the sensitive soil salinity bands were screened. Second, new spectral parameters, including multiband information, were generated via band combination operations (i.e., adding, subtracting, multiplying and dividing operations between bands). Then, the spectral parameters were screened. The indicator of the screening was the correlation coefficient (expressed as R) and a band or band combination with a larger absolute value of R was screened as a sensitive band or spectral parameter, which showed a higher correlation with the soil salinity [
37]. In this paper, the commonly used Pearson correlation coefficient is adopted.
Finally, the sensitive bands and spectral parameters of the modeling set were used as independent variables and the soil salinity was used as a dependent variable to construct the soil salinity inversion model by a variety of regression methods.
The validation data set was used for model validation. The spectral data of each sampling point in the verification set were incorporated into the models to determine the soil salinity inversion values of each sampling point, and a correlation analysis was carried out with the measured values to determine the verification precision.
The modeling precisions and verification precisions (coefficient of determination, R
2) were determined to select the best inverse model. R
2 was used to compare and evaluate the performance of the models.
Table 2 shows the prediction abilities of models with R
2 values in different ranges [
38]. Relevance analysis and model construction were implemented using Statistical Product and Service Solutions (SPSS 22) software (International Business Machines Corporation, Armonk, New York, USA).
2.4. Reflectance Normalization of Sentinel-2A Imagery
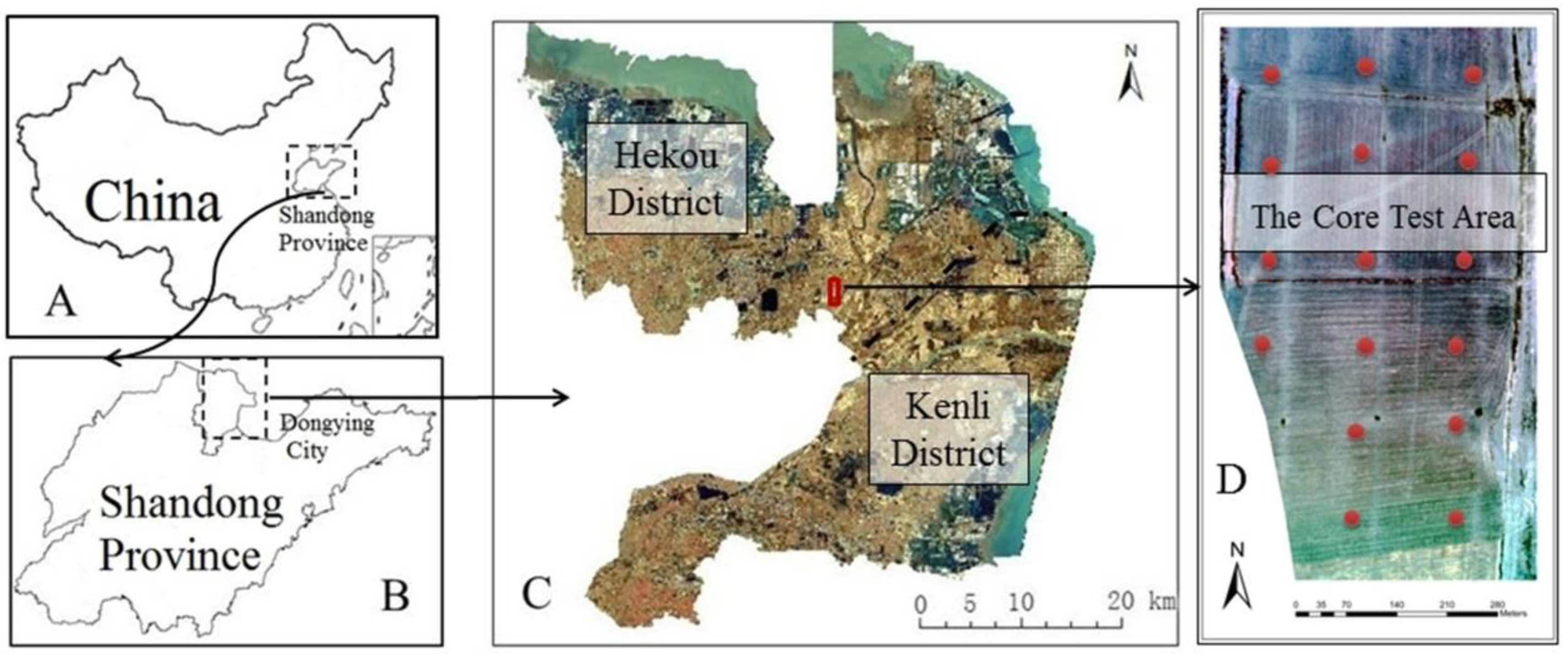
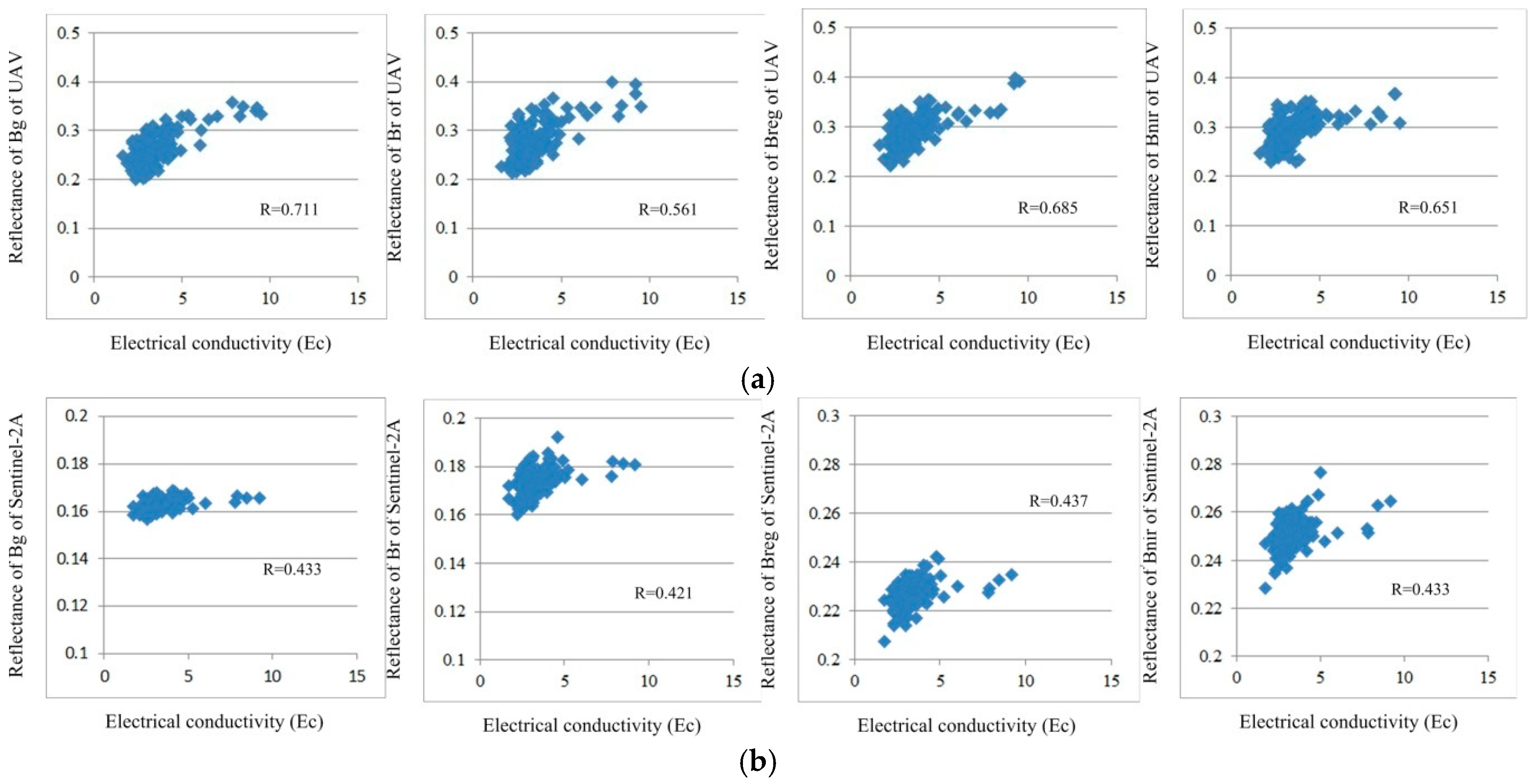
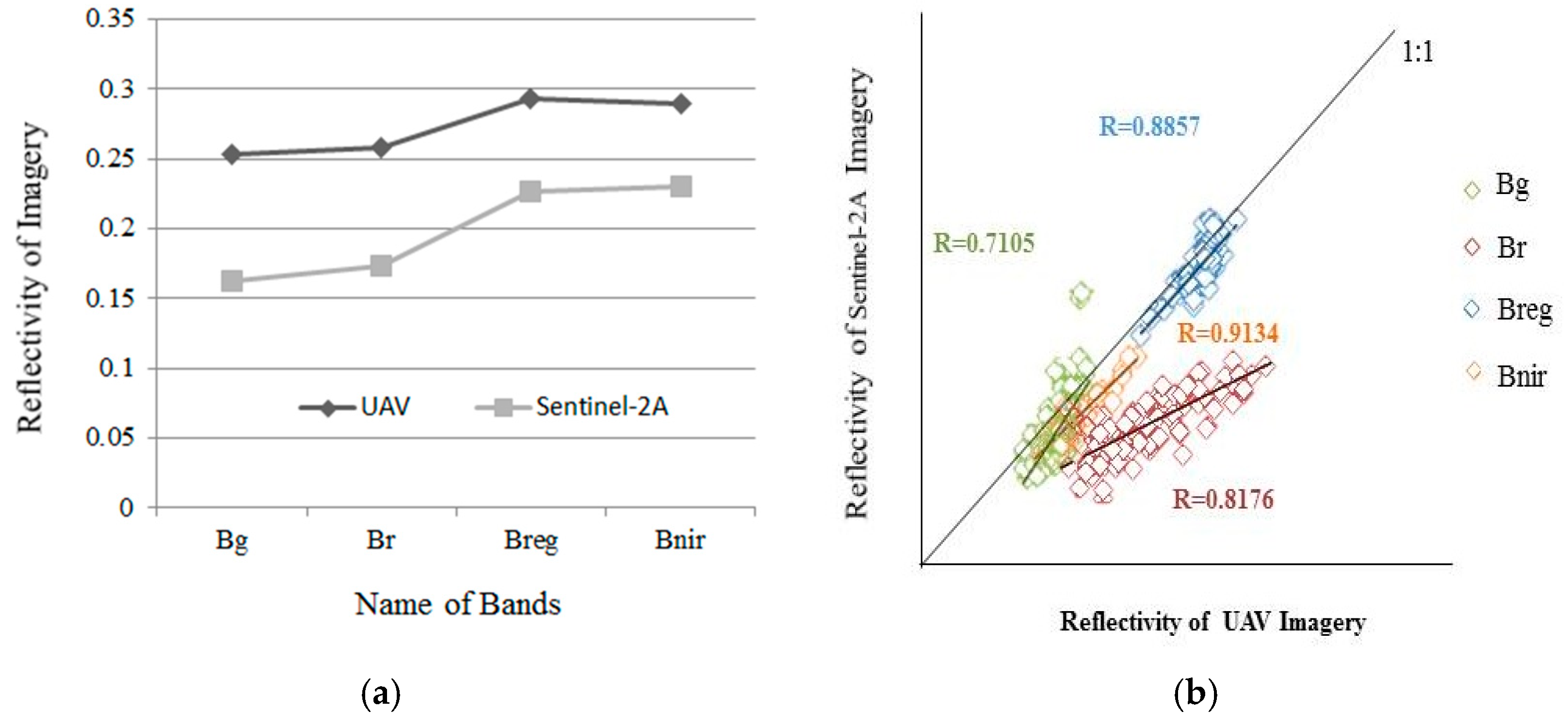
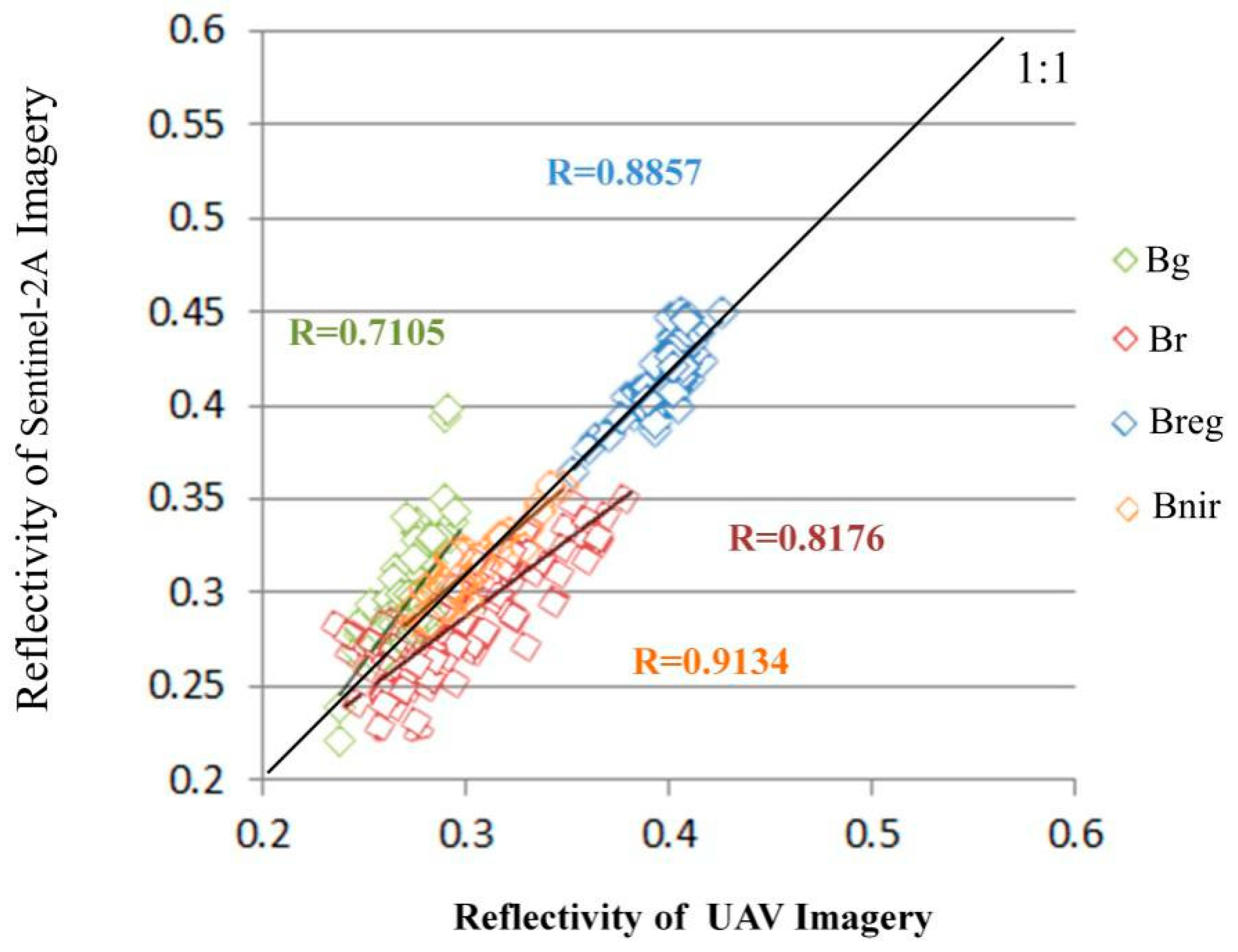
The average reflectivity of each band of the 1600 pixels of UAV images and the corresponding reflectivity of one pixel of Sentinel-2A imagery were determined and the relationship between them was analyzed.
To determine whether it is feasible to normalize the reflectivity of Sentinel-2A images based on UAV images, the average reflectivity of 140 sampling points in each band of the UAV and Sentinel-2A images was calculated, and the variation trends of the two images were compared. Furthermore, scatter plots of the average reflectivity of the corresponding bands of the UAV and the Sentinel-2A images were generated to prove the correlation between the reflectivities of the two images.
To normalize the reflectance of Sentinel-2A, the mean of ratios correction method was used [
39,
40]. First, the ratio between the reflectance of the corresponding pixels in the green band of the Sentinel-2A images and the green band of the UAV images was calculated (such as
/
) and then the mean of all ratios was taken as the reflectivity normalization coefficient of the green band. The reflectance normalization coefficients of the other bands were calculated via the same method.
To obtain the normalized Sentinel-2A imagery, the reflectance in each band of the Sentinel-2A imagery was divided by the reflectivity normalization coefficients. This process was implemented in ENVI 5.1.
2.5. Validation of the Soil Salinity Inversion Model
The validation of the UAV-based best soil salinity inversion model obtained from
Section 2.2 was mainly reflected in the following two aspects.
To verify whether reflectance normalization improves the inversion precision of Sentinel-2A imagery, the precisions under different conditions were compared and analyzed by applying a UAV-based inversion model to the Sentinel-2A imagery before reflectance normalization and after reflectance normalization and applying a Sentinel-2A-based model to the Sentinel-2A imagery. Thus, the feasibility of applying reflectance normalization to the Sentinel-2A imagery was verified.
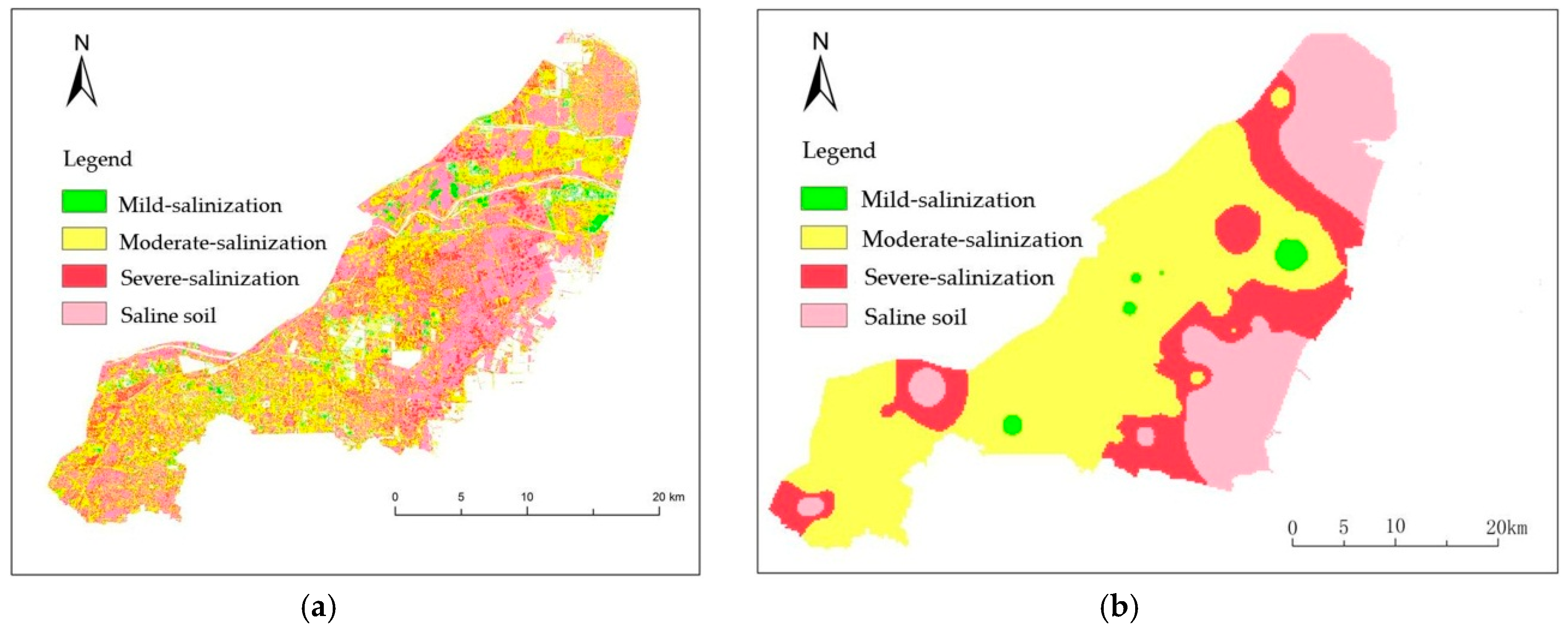
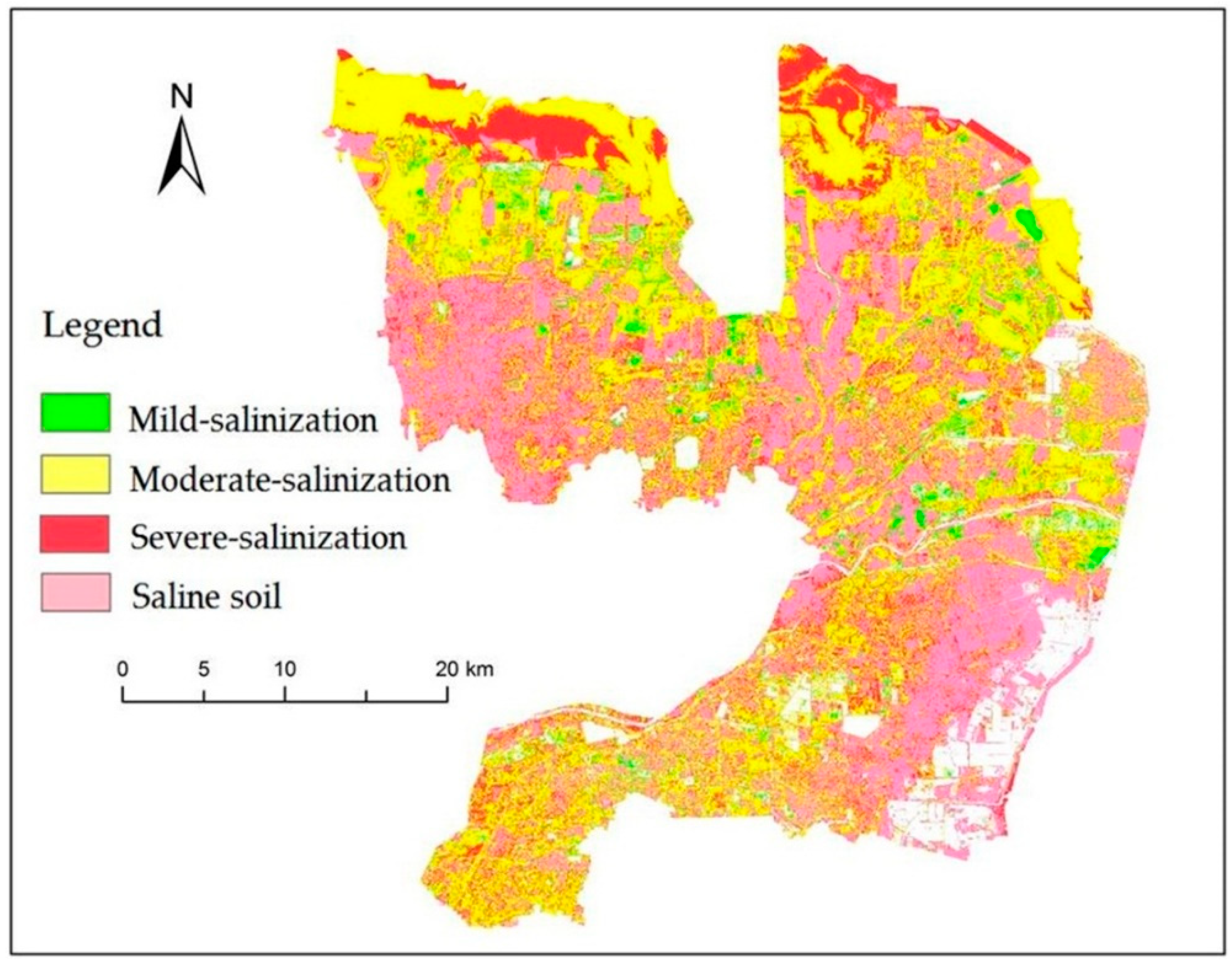
To verify the spatial and temporal universality of the model, the inversion and interpolation results of the verification area were compared. The Sentinel-2A imagery of the verification area (Kenli District) acquired on the 1st May 2016, was pre-processed and reflectance normalized and the best inversion model was then used to obtain the inversion result. The inversion result was the soil salinity of each pixel in the Sentinel-2A images. Using the field-measured soil salinity data in 2016, the interpolation chart of the soil salinity in the verification area was obtained. Subsequently, the pixels of the inversion result and interpolation chart were classified according to the following criteria: non-salinization (<1 g/kg), mild salinization (1–2 g/kg), moderate salinization (2–4 g/kg), severe salinization (4–6 g/kg) and saline soil (>6 g/kg). A map of the spatial distribution of the soil salinity and a table of the areal proportion of each salinity grade were obtained in this manner.
Inversion was performed using ENVI 5.1 and classification of the pixels was performed using the decision tree method in ENVI 5.1. An interpolation map was produced by the kriging interpolation method of ArcGIS 10.1 (Environmental Systems Research Institute, Inc., California, USA), which is applicable to a relatively small number of sampling points and continuous variables (soil salinities are continuous variables).
2.6. Inversion of Soil Salinity
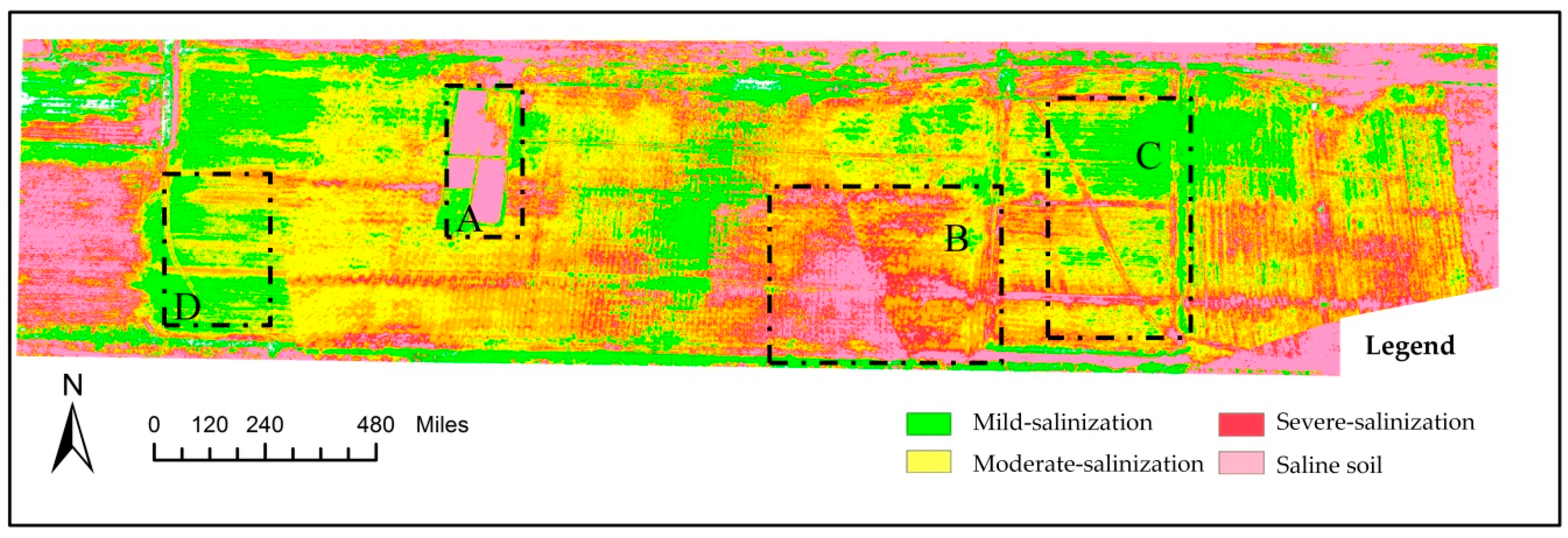
The inversion of soil salinity includes the field scale (the core test area) and the regional scale (the study area). Based on the best inversion model and the UAV imagery obtained in March 2018, a soil salinity inversion map at the field scale was obtained. Based on the best inversion model and the Sentinel-2A imagery (1 March 2018) after preprocessing and reflectance normalization, a scaled-up soil salinity inversion for the whole study area was performed. The inversion results were divided into five grades according to the criteria and method described above and maps of the spatial distribution of soil salinity levels and area statistics for each salinity level were obtained.
5. Conclusions
This paper proposes a method for inverting the salinity of coastal saline soil. A model was constructed and the multiscale inversion of soil salinity was realized. The following conclusions can be drawn.
The sensitive to soil salinity are the (green), (red), (red-edge) and (near-infrared bands). The spectral parameters are mainly and , among others, with exhibiting the strongest response to soil salinity.
In this paper, the best inversion model of coastal saline soil salinity is as follows: . The modeling precision of this model is 0.743, and the verification precision is 0.809. The model has high significance, strong predictive ability and good universality.
The UAV-based model cannot be applied directly to the Sentinel-2A images to achieve scaled-up inversion. Therefore, the normalization correction of reflectivity is a necessary process.
This paper presents an inversion of the soil salinity at different scales, thereby confirming the feasibility, reliability and stability of the proposed method of performing a scaled-up inversion of the large-scale soil salinity in satellite images with reflectance correction.
This paper presents an effective method to map the soil salinity in the coastal area of the YRD by integrating satellite, UAV and ground-measured data. A highly universal inversion model of the springtime soil salinity is constructed accordingly and a scaled-up inversion method for application to satellite imagery is proposed, which can perform accurate soil salinity inversions for coastal saline soils at different scales. This method shows potential to be used in the management and utilization of salinized land sources.
In the future, the following three aspects will be focused on: the improvement of model precision, the discussion of the driving factors and formation mechanism of soil salinization and the improvement of spatial-temporal universality of monitoring.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}