A PolSAR Change Detection Index Based on Neighborhood Information for Flood Mapping





Abstract
:1. Introduction
2. Materials and Methods
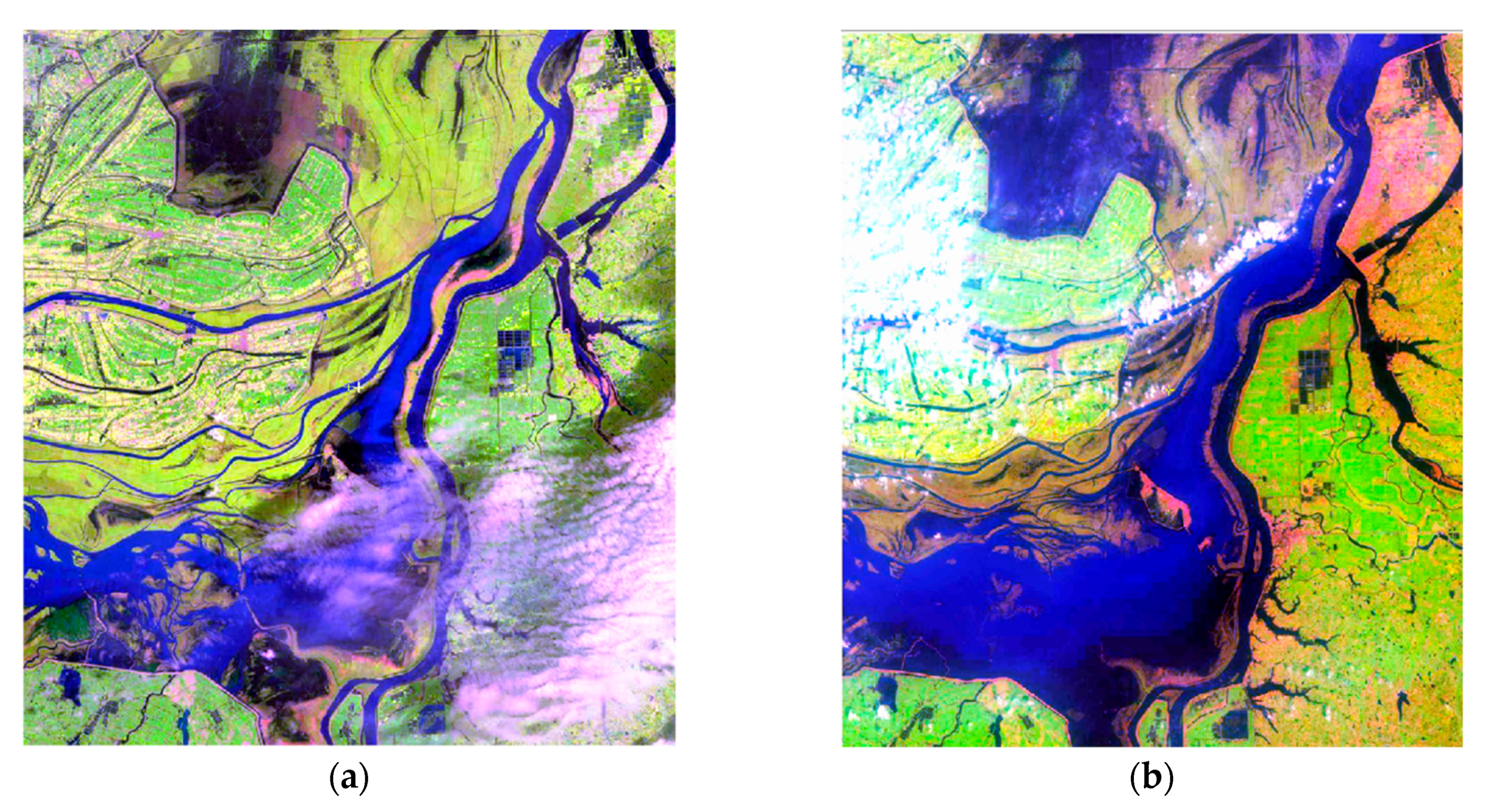
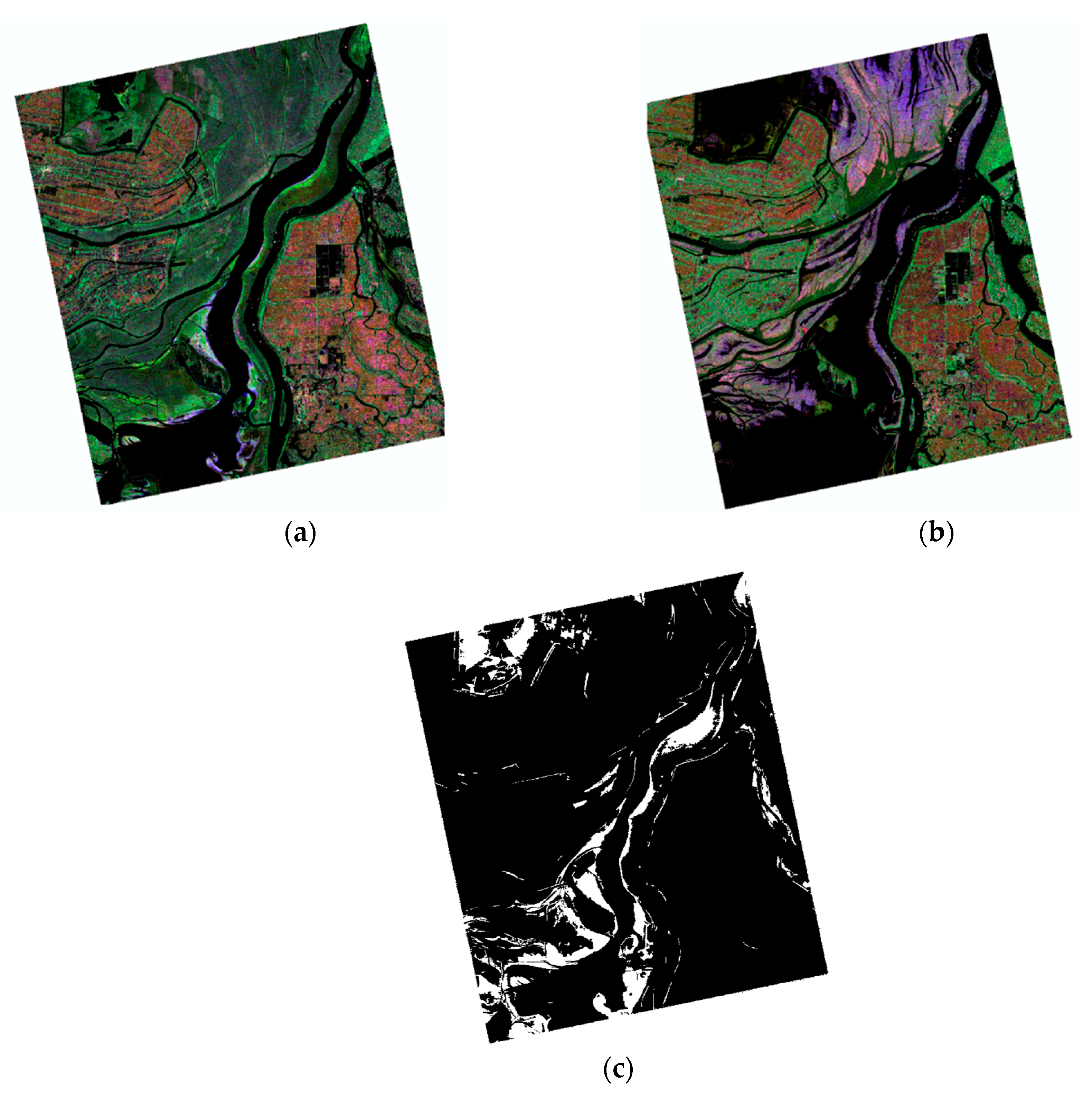
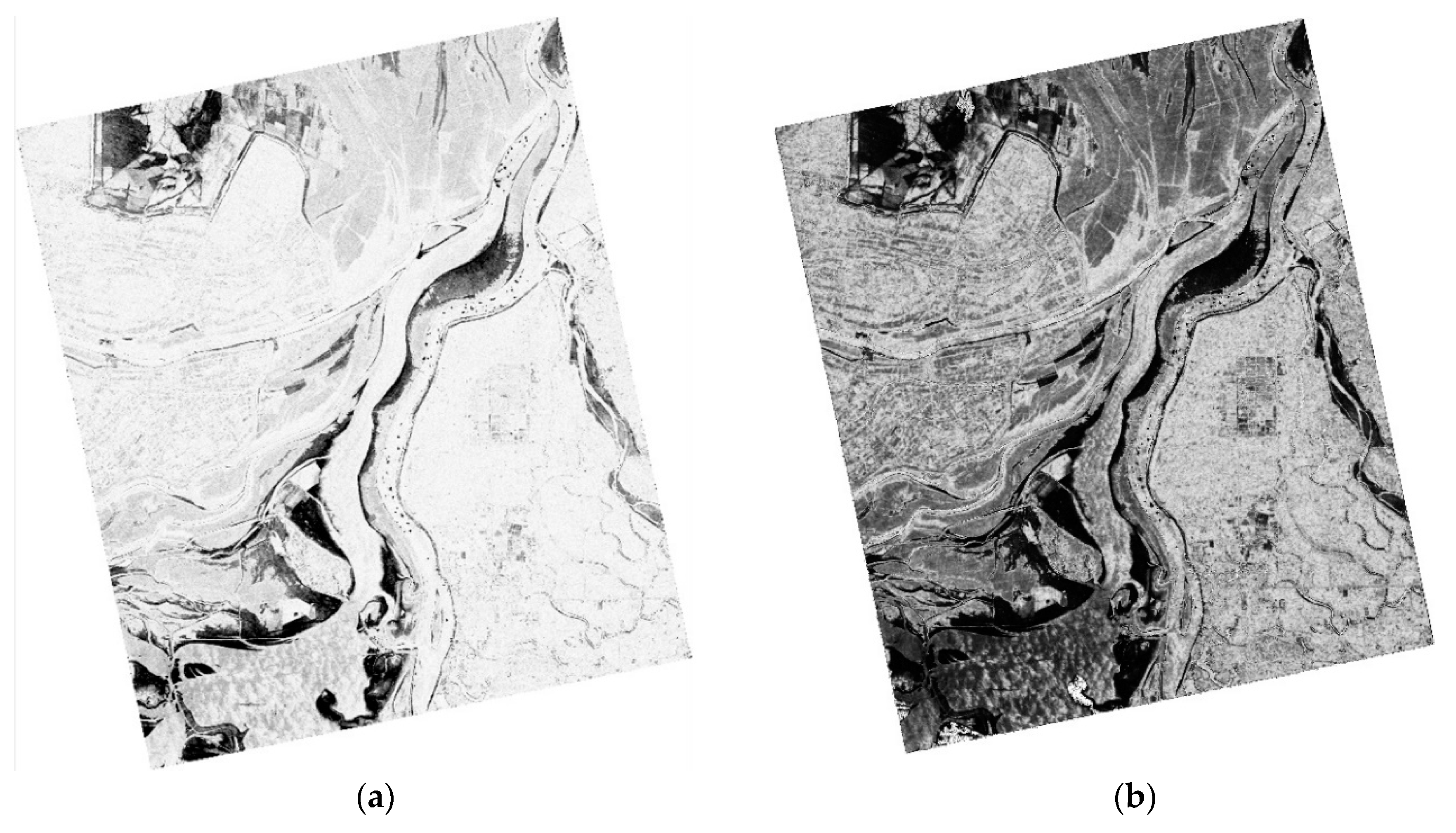
2.1. Study Area and Dataset
2.2. Method
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- De Moel, H.; van Alphen, J.; Aerts, J. Flood maps in Europe-methods, availability and use. Nat. Hazards Earth Syst. Sci. 2009, 9, 289–301. [Google Scholar] [CrossRef]
- Du, X.; Hendy, I.; Schimmelmann, A. A 9000-year flood history for Southern California: A revised stratigraphy of varved sediments in Santa Barbara Basin. Mar. Geol. 2018, 397, 29–42. [Google Scholar] [CrossRef]
- Milly, P.C.D.; Wetherald, R.T.; Dunne, K.A.; Delworth, T.L. Increasing risk of great floods in a changing climate. Nature 2002, 415, 514. [Google Scholar] [CrossRef]
- Kundzewicz, Z.W.; Mata, L.J.; Arnell, N.W.; Doll, P.; Kabat, P.; Jimenez, B.; Miller, K.; Oki, T.; Zekai, S.; Shiklomanov, I. Freshwater resources and their management. In Climate Change 2007: Impacts, Adaptation and Vulnerability. Contribution of Working Group II to the Fourth Assessment Report of the Intergovernmental Panel on Climate Change; Parry, M.L., Canziani, O.F., Palutikof, J.P., Eds.; Cambridge University Press: Cambridge, UK, 2007. [Google Scholar]
- Kreibich, H.; Pech, I.; Schröter, K.; Müller, M.; Thieken, A.H. New insights into flood warning and emergency response from the perspective of affected parties. Nat. Hazards Earth Syst. Sci. Discuss. Rev. 2016. [Google Scholar] [CrossRef]
- Follum, M.L.; Tavakoly, A.A.; Niemann, J.D.; Snow, A.D. AutoRAPID: A model for prompt streamflow estimation and flood inundation mapping over regional to continental extents. JAWRA J. Am. Water Resour. Assoc. 2017, 53, 280–299. [Google Scholar] [CrossRef]
- Merwade, V.; Rajib, A.; Liu, Z. An integrated approach for flood inundation modeling on large scales. In Bridging Science and Policy Implication for Managing Climate Extremes; World Scientific Publication Company: Singapore, 2018; Chapter 9; pp. 133–155. [Google Scholar]
- Giustarini, L.; Hostache, R.; Matgen, P.; Schumann, G.J.-P.; Bates, P.D.; Mason, D.C. A change detection approach to flood mapping in urban areas using TerraSAR-X. IEEE Trans. Geosci. Remote Sens. 2012, 51, 2417–2430. [Google Scholar] [CrossRef]
- Huang, S.; Cai, X.; Chen, S.; Liu, D. Change detection method based on fractal model and wavelet transform for multitemporal SAR images. Int. J. Appl. Earth Obs. Geoinf. 2011, 13, 863–872. [Google Scholar] [CrossRef]
- Verbesselt, J.; Hyndman, R.; Zeileis, A.; Culvenor, D. Phenological change detection while accounting for abrupt and gradual trends in satellite image time series. Remote Sens. Environ. 2010, 114, 2970–2980. [Google Scholar] [CrossRef] [Green Version]
- Rokni, K.; Ahmad, A.; Solaimani, K.; Hazini, S. A new approach for surface water change detection: Integration of pixel level image fusion and image classification techniques. Int. J. Appl. Earth Obs. Geoinf. 2015, 34, 226–234. [Google Scholar] [CrossRef]
- Hussain, M.; Chen, D.; Cheng, A.; Wei, H.; Stanley, D. Change detection from remotely sensed images: From pixel-based to object-based approaches. ISPRS J. Photogramm. Remote Sens. 2013, 80, 91–106. [Google Scholar] [CrossRef]
- Rignot, E.J.M.; van Zyl, J.J. Change detection techniques for ERS-1 SAR data. IEEE Trans. Geosci. Remote Sens. 1993, 31, 896–906. [Google Scholar] [CrossRef] [Green Version]
- Ma, J.; Gong, M.; Zhou, Z. Wavelet fusion on ratio images for change detection in SAR images. IEEE Geosci. Remote Sens. Lett. 2012, 9, 1122–1126. [Google Scholar] [CrossRef]
- Bazi, Y.; Bruzzone, L.; Melgani, F. Automatic identification of the number and values of decision thresholds in the log-ratio image for change detection in SAR images. IEEE Geosci. Remote Sens. Lett. 2006, 3, 349–353. [Google Scholar] [CrossRef]
- Yousif, O.; Ban, Y. Improving urban change detection from multitemporal SAR images using PCA-NLM. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2032–2041. [Google Scholar] [CrossRef]
- Cheng, Y.-Q.; Li, H.-C.; Celik, T.; Zhang, F. FRFT-based improved algorithm of unsupervised change detection in SAR images via PCA and K-means clustering. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Melbourne, Australia, 21–26 July 2013; pp. 1952–1955. [Google Scholar]
- Qi, Z.; Yeh, A.G.-O. Integrating change vector analysis, post-classification comparison, and object-oriented image analysis for land use and land cover change detection using RADARSAT-2 polarimetric SAR images. In Advances in Spatial Data Handling; Springer: Berlin, Germany, 2013; pp. 107–123. [Google Scholar]
- Molinier, M.; Rauste, Y. Comparison and evaluation of polarimetric change detection techniques in aerial SAR data. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, IGARSS 2007, Barcelona, Spain, 23–27 July 2007; pp. 2386–2389. [Google Scholar]
- Conradsen, K.; Nielsen, A.A.; Schou, J.; Skriver, H. A test statistic in the complex Wishart distribution and its application to change detection in polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 4–19. [Google Scholar] [CrossRef]
- Dabboor, M.; White, L.; Brisco, B.; Charbonneau, F. Change detection with compact polarimetric SAR for monitoring wetlands. Can. J. Remote Sens. 2015, 41, 408–417. [Google Scholar] [CrossRef]
- Liu, M.; Zhang, H.; Wang, C.; Shan, Z. Urban change detection for high-resolution fully polarimetric SAR using a modified heterogeneous clutter model. In Proceedings of the 9th European Conference on Synthetic Aperture Radar, 2012 EUSAR, Piscataway, NJ, USA, 23–26 April 2012; pp. 87–90. [Google Scholar]
- Gong, M.; Cao, Y.; Wu, Q. A neighborhood-based ratio approach for change detection in SAR images. IEEE Geosci. Remote Sens. Lett. 2012, 9, 307–311. [Google Scholar] [CrossRef]
- Jia, L.; Li, M.; Wu, Y.; Zhang, P.; Chen, H.; An, L. Semisupervised SAR image change detection using a cluster-neighborhood kernel. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1443–1447. [Google Scholar] [CrossRef]
- Jia, L.; Li, M.; Zhang, P.; Wu, Y.; Zhu, H. SAR image change detection based on multiple kernel K-means clustering with local-neighborhood information. IEEE Geosci. Remote Sens. Lett. 2016, 13, 856–860. [Google Scholar] [CrossRef]
- Lee, J.-S.; Grunes, M.R.; de Grandi, G. Polarimetric SAR speckle filtering and its implication for classification. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2363–2373. [Google Scholar]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man. Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Cohen, J. A coefficient of agreement for nominal scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- West, R.D.; Riley, R.M. Polarimetric Interferometric SAR Change Detection Discrimination. IEEE Trans. Geosci. Remote Sens. 2018, 57, 3091–3104. [Google Scholar] [CrossRef]
- Liu, G.; Li, L.; Jiao, L.; Dong, Y.; Li, X. Stacked Fisher Autoencoder for SAR Change Detection. Pattern Recognit. 2019, 96, 106971. [Google Scholar] [CrossRef]
- Lv, N.; Chen, C.; Qiu, T.; Sangaiah, A.K. Deep learning and superpixel feature extraction based on contractive autoencoder for change detection in SAR images. IEEE Trans. Ind. Inform. 2018, 14, 5530–5538. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acquisition Date | Mode | Polarization Type | Incidence Angle Range (degrees) | Nominal Range Resolution (m) |
|---|---|---|---|---|
| 06 June 2008 17 August 2008 | FQ16 | Quad-pol | 35.4–37 | 8.6–9 |
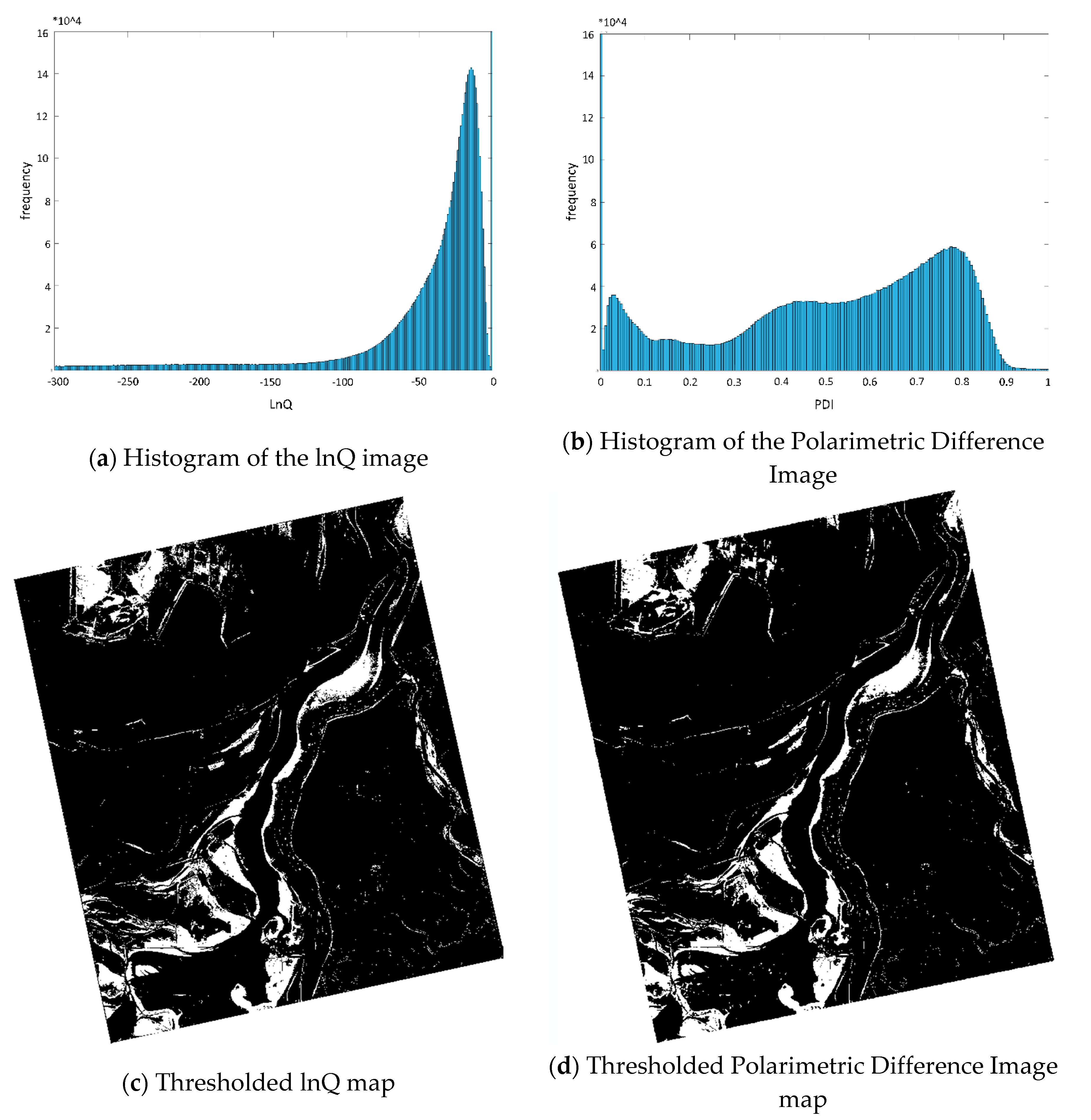
| Measures | lnQ | PDI |
|---|---|---|
| FN | 556,122 | 11,057 |
| FP | 13,325 | 464,162 |
| TN | 5,364,371 | 4,913,534 |
| TP | 1,822,370 | 2,367,435 |
| OE | 569,447 | 475,219 |
| PCC | 0.927 | 0.938 |
| Kappa | 0.816 | 0.863 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mahdavi, S.; Salehi, B.; Huang, W.; Amani, M.; Brisco, B. A PolSAR Change Detection Index Based on Neighborhood Information for Flood Mapping. Remote Sens. 2019, 11, 1854. https://doi.org/10.3390/rs11161854
Mahdavi S, Salehi B, Huang W, Amani M, Brisco B. A PolSAR Change Detection Index Based on Neighborhood Information for Flood Mapping. Remote Sensing. 2019; 11(16):1854. https://doi.org/10.3390/rs11161854
Chicago/Turabian StyleMahdavi, Sahel, Bahram Salehi, Weimin Huang, Meisam Amani, and Brian Brisco. 2019. "A PolSAR Change Detection Index Based on Neighborhood Information for Flood Mapping" Remote Sensing 11, no. 16: 1854. https://doi.org/10.3390/rs11161854
APA StyleMahdavi, S., Salehi, B., Huang, W., Amani, M., & Brisco, B. (2019). A PolSAR Change Detection Index Based on Neighborhood Information for Flood Mapping. Remote Sensing, 11(16), 1854. https://doi.org/10.3390/rs11161854