Mapping Height and Aboveground Biomass of Mangrove Forests on Hainan Island Using UAV-LiDAR Sampling



Abstract
:
1. Introduction
2. Materials
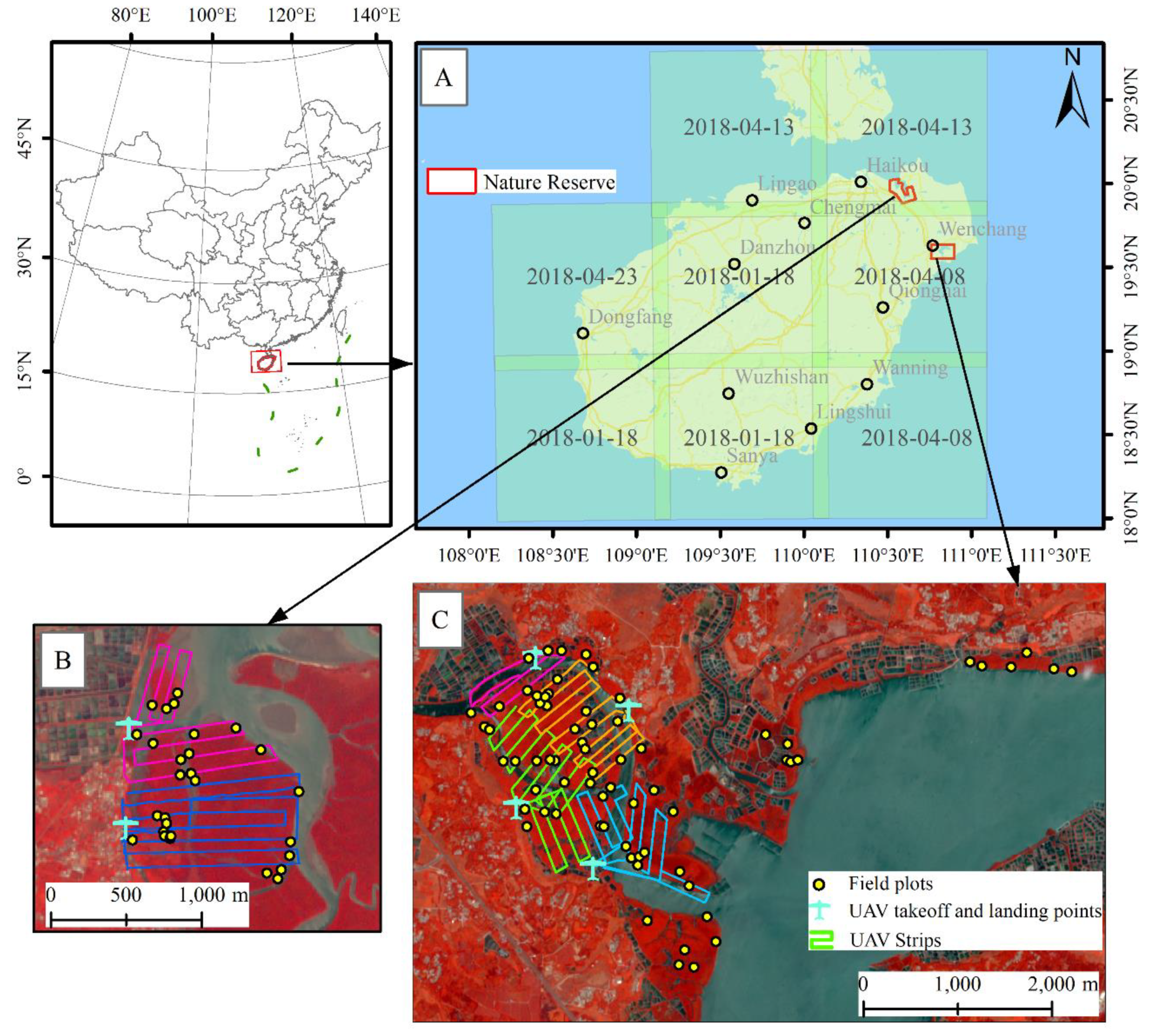
2.1. Study Area and Field Survey
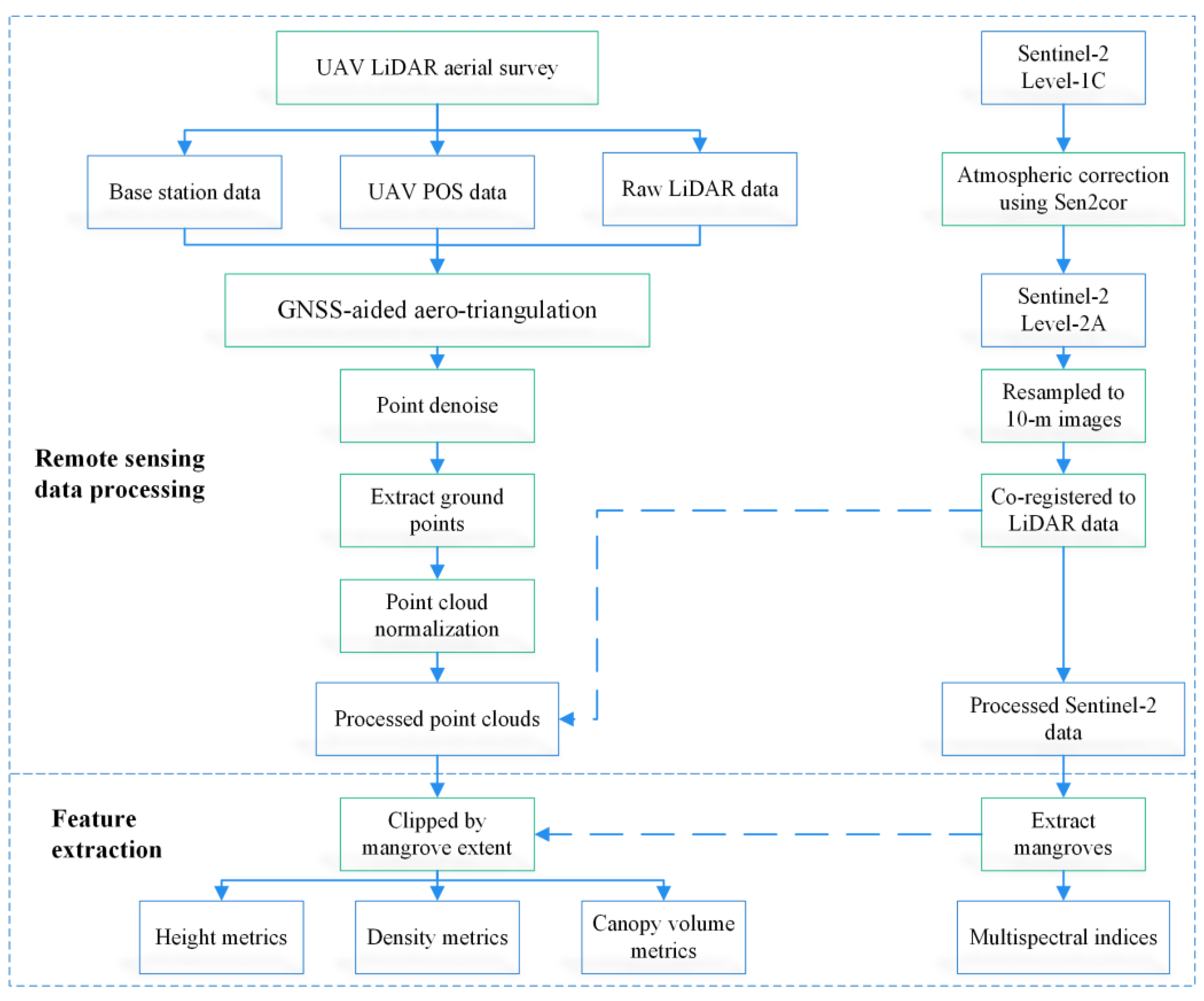
2.2. UAV-LiDAR Data
2.3. Sentinel-2 Data
3. Methods
3.1. LiDAR Metrics and Sentinel-2 Indices
3.2. Mangrove Extent Extraction
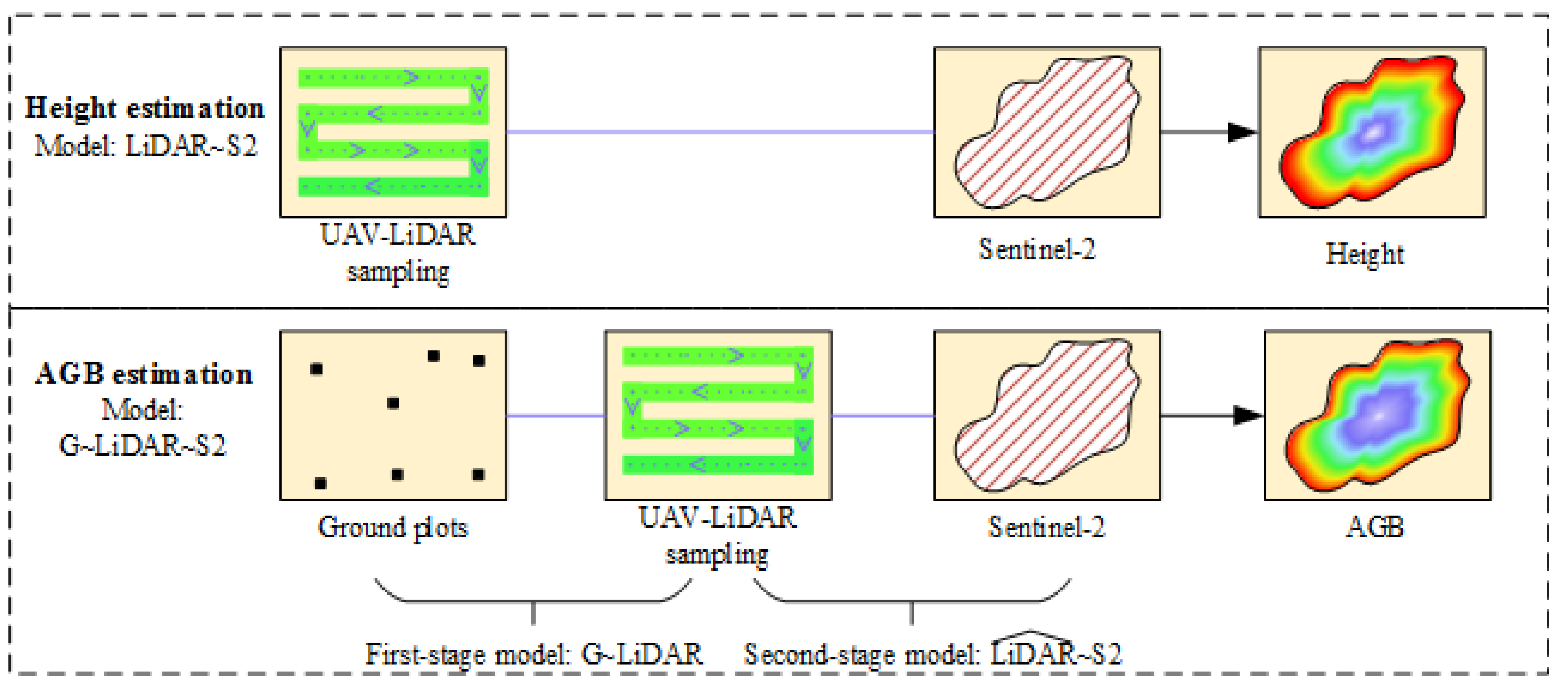
3.3. Model Fitting Based on LiDAR Samples
3.3.1. Height Estimation Model
3.3.2. AGB Estimation Model
3.4. Random Forest and Feature Selection
3.5. Accuracy Assessment
4. Results
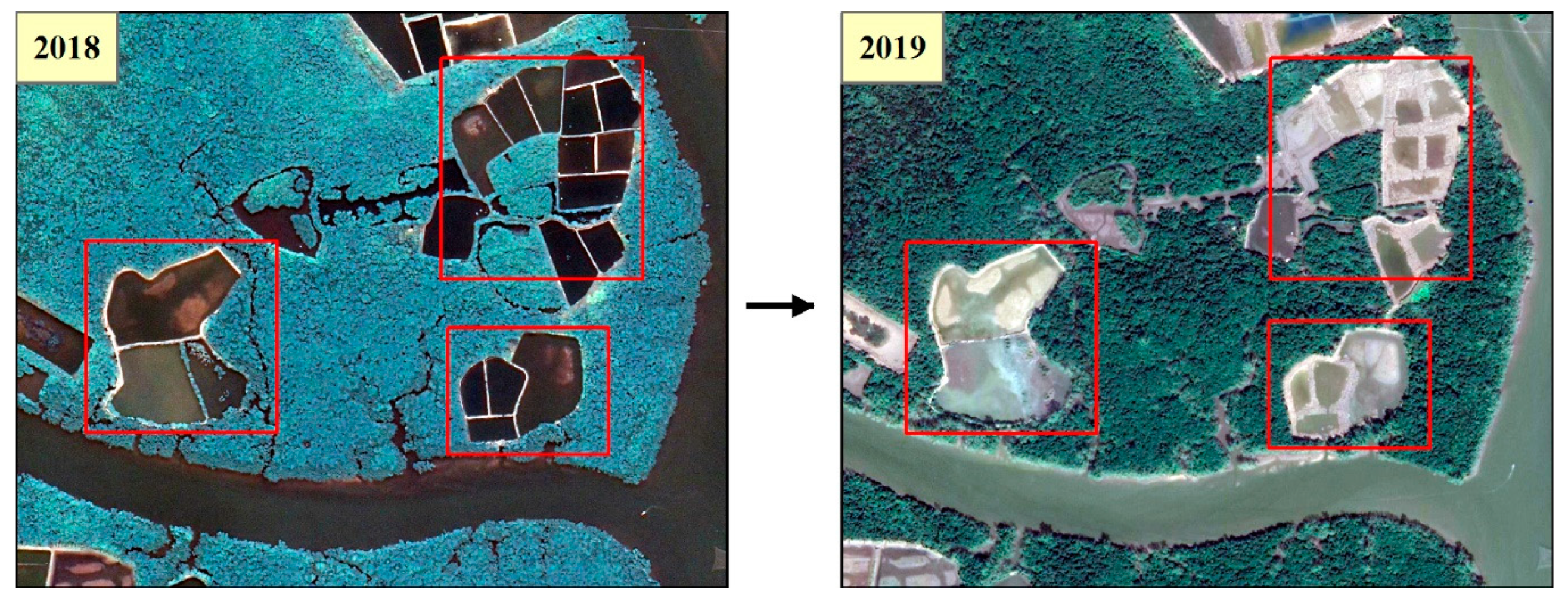
4.1. Mangrove Identification Result
4.2. Feature Selection
4.3. Model Assessment
4.3.1. The Height Estimation Model
4.3.2. The First-Stage Model of AGB Estimation
4.3.3. The Second-Stage Model of AGB Estimation
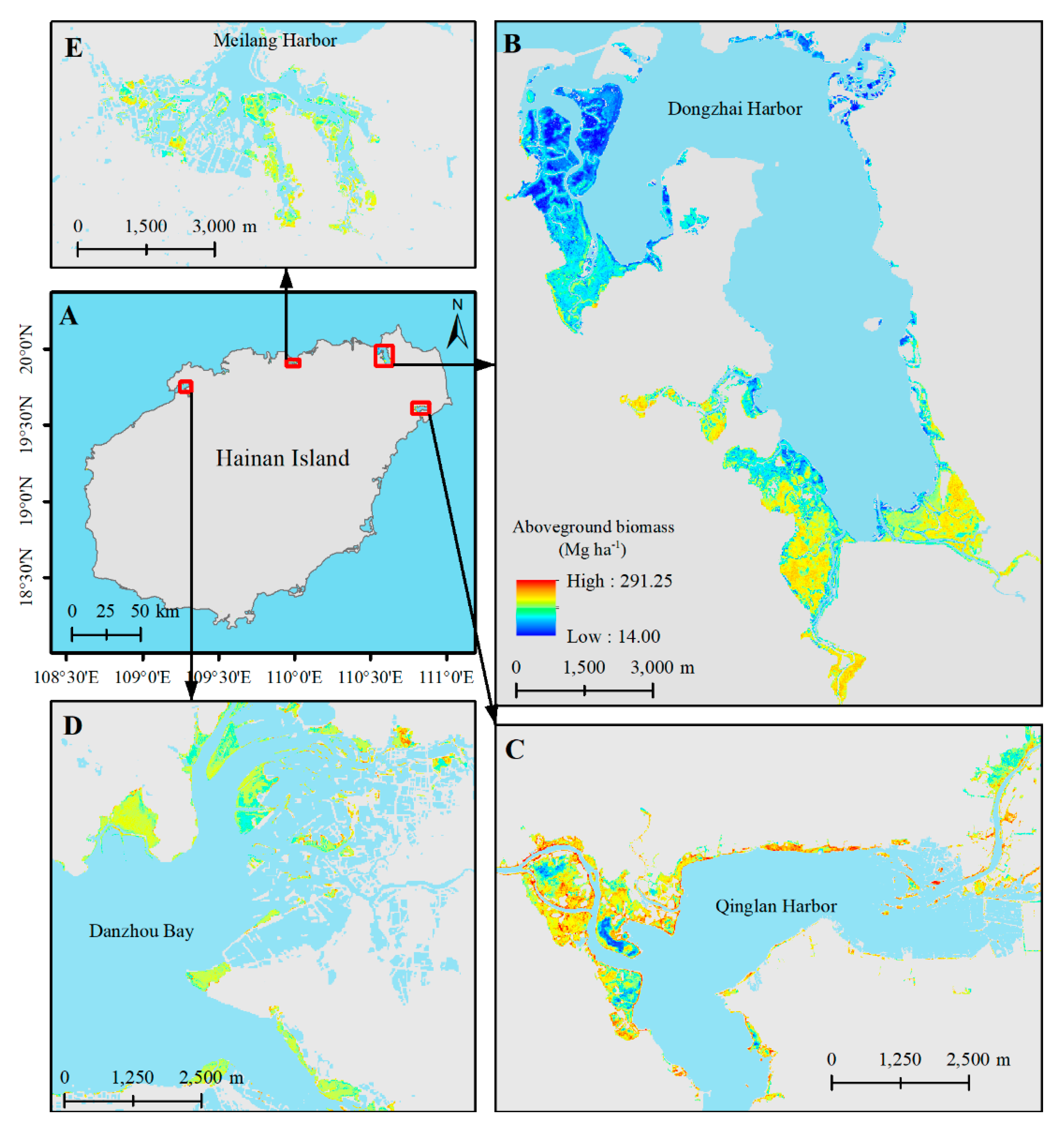
4.4. Mangrove Height and AGB Map of Hainan Island
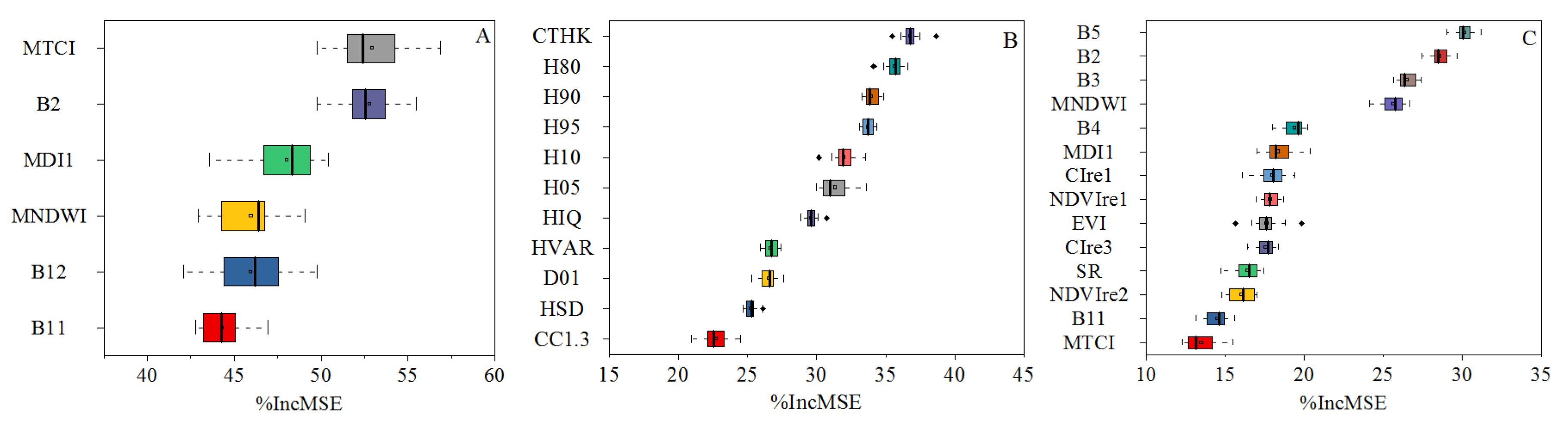
4.5. Variable Importance
5. Discussion
5.1. The Mangrove Height and AGB on Hainan Island and Comparison with Mangroves in Other Areas
5.2. Fieldwork Challenges in Mangrove Habitats and the Feasibility of LiDAR Sampling
5.3. Relevance of Predictor Variables
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LiDAR metrics | Formula/Definition | |
|---|---|---|
| Height metrics (24) | HMax, HMean, HMedian HSD, HVAR HSKE, HKUR HCV HIQ | Maximum height, Mean height, Median of height Standard deviation of heights, Variance of heights Skewness of heights, Kurtosis of heights Coefficient of variation of height, Interquartile distance of percentile height, H75th – H25th |
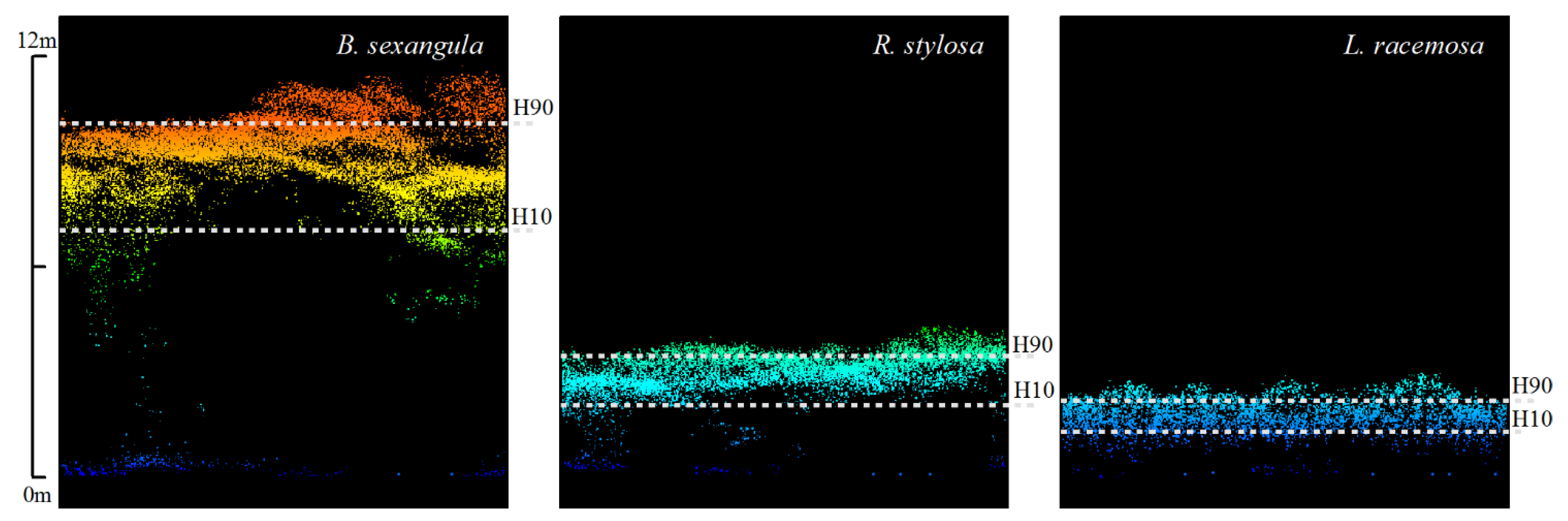
| H01, H05, H10, H20, H25, H30, H40, H50, H60, H70, H75, H80, H90, H95, H99 | Height percentiles. Point clouds are sorted according to the elevation. HX is the Xth percentile of height. There are 15 height percentiles metrics from 1% to 99% height. | |
| Density metrics (12) | D01, D02, D03, D04, D05, D06, D07, D08, D09, D10, D11, D12 | Canopy return density. Point clouds are divided into slices with the same interval from low to high elevation. DX is the number of canopy return points in the Xth slice relative to the total points. There are 12 density metrics in this study (from 0 to 24 m with an interval of 2 m). |
| Canopy volume metrics (17) | CC1.3 | Canopy cover above 1.3 m, . |
| CCmean | Canopy cover above mean height, . | |
| CRR | Canopy relief ratio, . | |
| CTHK | Canopy thickness, H90th–H10th. | |
| LAD03, LAD05, LAD07, LAD09, LAD11, LAD13, LAD15, LAD17, LAD19, LAD21, LAD23 | Leaf area density. Point clouds are divided into slices with the same interval from low to high elevation. LADX is the valid leaf area density in the Xth slice [73]. There are 11 leaf area density metrics in this study (from 2 to 24 m with an interval of 2 m). | |
| α, β | The scale parameter α and shape parameter β of the Weibull density distribution fitted to the foliage profile [39]. | |
| Sentinel-2 Feature | Formula/Definition | Reference | |
|---|---|---|---|
| Spectral bands (10) | Individual Bands | B2, B3, B4, B5, B6,B7, B8, B8a, B11, B12 | NA |
| Conventional near-infrared indices (7) | CIg | (B8/B3) − 1 | [74] |
| DVI | B8 − B4 | [70] | |
| EVI | [75] | ||
| FDI | B8 − (B3 + B4) | [44] | |
| NDVI | (B8 − B4)/(B8 + B4) | [76] | |
| SR | B8/B4 | [77] | |
| TNDVI | [23] | ||
| Red-edge indices (12) | CIg − re1 | B5/B3 − 1 | [74] |
| CIg − re2 | B6/B3 − 1 | [74] | |
| CIg − re3 | B7/B3 − 1 | [74] | |
| IRECI | (B7 − B4)/(B5/B6) | [23] | |
| MTCI | (B6 − B5)/(B5 − B4) | [68] | |
| MCARI | [(B5 − B4) − 0.2 × (B5 − B3)] × (B5/B4) | [78] | |
| MSRren | [79] | ||
| NDVIre1 | (B8 − B5)/(B8 + B5) | [22] | |
| NDVIre2 | (B8 − B6)/(B8 + B6) | [22] | |
| NDVIre3 | (B8 − B7)/(B8 + B7) | [22] | |
| PSSRa | B7/B4 | [80] | |
| S2REP | 705 + 35 × [(B4 + B7)/2 − B5]/(B6 − B5) | [81] | |
| Shortwave infrared indices (3) | MDI1 | (B8 − B11)/B11 | [43] |
| MDI2 | (B8 − B12)/B12 | [43] | |
| MNDWI | (B3 − B11)/(B3 + B11) | [82] | |
References
- Giri, C.; Ochieng, E.; Tieszen, L.L.; Zhu, Z.; Singh, A.; Loveland, T.; Masek, J.; Duke, N. Status and distribution of mangrove forests of the world using earth observation satellite data. Glob. Ecol. Biogeogr. 2011, 20, 154–159. [Google Scholar] [CrossRef]
- Duke, N.; Ball, M.; Ellison, J. Factors influencing biodiversity and distributional gradients in mangroves. Glob. Ecol. Biogeogr. Lett. 1998, 7, 27–47. [Google Scholar] [CrossRef]
- Asian, A.; Rahman, A.F.; Warren, M.W.; Robeson, S.M. Mapping spatial distribution and biomass of coastal wetland vegetation in indonesian papua by combining active and passive remotely sensed data. Remote Sens. Environ. 2016, 183, 65–81. [Google Scholar]
- Duke, N.C.; Meynecke, J.O.; Dittmann, S.; Ellison, A.M.; Anger, K.; Berger, U.; Cannicci, S.; Diele, K.; Ewel, K.C.; Field, C.D. A world without mangroves? Science 2007, 317, 41–42. [Google Scholar] [CrossRef] [PubMed]
- Fatoyinbo, T.; Feliciano, E.A.; Lagomasino, D.; Lee, S.K.; Trettin, C. Estimating mangrove aboveground biomass from airborne lidar data: A case study from the zambezi river delta. Environ. Res. Lett. 2018, 13, 12. [Google Scholar] [CrossRef]
- Chen, B.Q.; Xiao, X.M.; Li, X.P.; Pan, L.H.; Doughty, R.; Ma, J.; Dong, J.W.; Qin, Y.W.; Zhao, B.; Wu, Z.X.; et al. A mangrove forest map of china in 2015: Analysis of time series landsat 7/8 and sentinel-1a imagery in google earth engine cloud computing platform. ISPRS J. Photogramm. Remote Sens. 2017, 131, 104–120. [Google Scholar] [CrossRef]
- Liao, B.; Zhang, Q. Area, distribution and species composition of mangroves in china. Wetl. Sci. 2014, 12, 435–440. [Google Scholar]
- Chen, L.; Wang, W.; Zhang, Y.; Lin, G. Recent progresses in mangrove conservation, restoration and research in china. J. Plant Ecol. 2009, 2, 45–54. [Google Scholar] [CrossRef]
- Wang, L.; Sousa, W.P.; Peng, G.; Biging, G.S. Comparison of ikonos and quickbird images for mapping mangrove species on the caribbean coast of panama. Remote Sens. Environ. 2004, 91, 432–440. [Google Scholar] [CrossRef]
- Matasci, G.; Hermosilla, T.; Wulder, M.A.; White, J.C.; Coops, N.C.; Hobart, G.W.; Zald, H.S.J. Large-area mapping of canadian boreal forest cover, height, biomass and other structural attributes using landsat composites and lidar plots. Remote Sens. Environ. 2018, 209, 90–106. [Google Scholar] [CrossRef]
- Jachowski, N.R.A.; Quak, M.S.Y.; Friess, D.A.; Duangnamon, D.; Webb, E.L.; Ziegler, A.D. Mangrove biomass estimation in southwest thailand using machine learning. Appl. Geogr. 2013, 45, 311–321. [Google Scholar] [CrossRef]
- Pham, L.T.H.; Brabyn, L. Monitoring mangrove biomass change in vietnam using spot images and an object-based approach combined with machine learning algorithms. ISPRS J. Photogramm. Remote Sens. 2017, 128, 86–97. [Google Scholar] [CrossRef]
- Wang, L.; Jia, M.; Yin, D.; Tian, J. A review of remote sensing for mangrove forests: 1956–2018. Remote Sens. Environ. 2019, 231, 111223. [Google Scholar] [CrossRef]
- Pereira, F.R.D.S.; Kampel, M.; Soares, M.L.G.; Estrada, G.C.D.; Bentz, C.; Vincent, G. Reducing uncertainty in mapping of mangrove aboveground biomass using airborne discrete return lidar data. Remote Sens. 2018, 10, 637. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Nelson, R.F.; Næsset, E.; Ørka, H.O.; Coops, N.C.; Hilker, T.; Bater, C.W.; Gobakken, T. Lidar sampling for large-area forest characterization: A review. Remote Sens. Environ. 2012, 121, 196–209. [Google Scholar] [CrossRef] [Green Version]
- Puliti, S.; Ene, L.T.; Gobakken, T.; Næsset, E. Use of partial-coverage uav data in sampling for large scale forest inventories. Remote Sens. Environ. 2017, 194, 115–126. [Google Scholar] [CrossRef]
- Shao, Z.F.; Zhang, L.J.; Wang, L. Stacked sparse autoencoder modeling using the synergy of airborne lidar and satellite optical and sar data to map forest above-ground biomass. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 5569–5582. [Google Scholar] [CrossRef]
- Huang, H.; Liu, C.; Wang, X.; Zhou, X.; Gong, P. Integration of multi-resource remotely sensed data and allometric models for forest aboveground biomass estimation in china. Remote Sens. Environ. 2019, 221, 225–234. [Google Scholar] [CrossRef]
- Puliti, S.; Saarela, S.; Gobakken, T.; Stahl, G.; Naesset, E. Combining uav and sentinel-2 auxiliary data for forest growing stock volume estimation through hierarchical model-based inference. Remote Sens. Environ. 2018, 204, 485–497. [Google Scholar] [CrossRef]
- Guo, Q.; Su, Y.; Hu, T.; Zhao, X.; Wu, F.; Li, Y.; Liu, J.; Chen, L.; Xu, G.; Lin, G.; et al. An integrated uav-borne lidar system for 3d habitat mapping in three forest ecosystems across china. Int. J. Remote Sens. 2017, 38, 2954–2972. [Google Scholar] [CrossRef]
- Mura, M.; Bottalico, F.; Giannetti, F.; Bertani, R.; Giannini, R.; Mancini, M.; Orlandini, S.; Travaglini, D.; Chirici, G. Exploiting the capabilities of the sentinel-2 multi spectral instrument for predicting growing stock volume in forest ecosystems. Int. J. Appl. Earth Obs. Geoinf. 2018, 66, 126–134. [Google Scholar] [CrossRef]
- Shoko, C.; Mutanga, O. Examining the strength of the newly-launched sentinel 2 msi sensor in detecting and discriminating subtle differences between c3 and c4 grass species. ISPRS J. Photogramm. Remote Sens. 2017, 129, 32–40. [Google Scholar] [CrossRef]
- Castillo, J.A.A.; Apan, A.A.; Maraseni, T.N.; Salmo, S.G. Estimation and mapping of above-ground biomass of mangrove forests and their replacement land uses in the philippines using sentinel imagery. ISPRS J. Photogramm. Remote Sens. 2017, 134, 70–85. [Google Scholar] [CrossRef]
- Pham, T.D.; Yoshino, K.; Le, N.N.; Bui, D.T. Estimating aboveground biomass of a mangrove plantation on the northern coast of vietnam using machine learning techniques with an integration of alos-2 palsar-2 and sentinel-2a data. Int. J. Remote Sens. 2018, 39, 7761–7788. [Google Scholar] [CrossRef]
- Jia, M.; Wang, Z.; Li, L.; Song, K.; Ren, C.; Liu, B.; Mao, D. Mapping china’s mangroves based on an object-oriented classification of landsat imagery. Wetlands 2014, 34, 277–283. [Google Scholar] [CrossRef]
- Tu, Z.; Chen, X.; Wu, R. Current status of mangrove resources in mangrove nature reserve of hainan province. Ocean Dev. Manag. 2015, 32, 90–92. [Google Scholar]
- Tam, N.F.Y.; Wong, Y.S.; Lan, C.Y.; Chen, G.Z. Community structure and standing crop biomass of a mangrove forest in Futian nature reserve, Shenzhen, China. Hydrobiologia 1995, 295, 193–201. [Google Scholar] [CrossRef]
- Fan, K.-C. Population structure, allometry and above-ground biomass of avicennia marina forest at the chishui river estuary, Tainan county, Taiwan. J. For. Res. 2008, 30, 1–15. [Google Scholar]
- Clough, B.F.; Scott, K. Allometric relationships for estimating above-ground biomass in six mangrove species. For. Ecol. Manag. 1989, 27, 117–127. [Google Scholar] [CrossRef]
- Hossain, M.; Siddique, M.R.H.; Saha, S.; Abdullah, S.M.R. Allometric models for biomass, nutrients and carbon stock in excoecaria agallocha of the sundarbans, Bangladesh. Wetl. Ecol. Manag. 2015, 23, 765–774. [Google Scholar] [CrossRef]
- Komiyama, A.; Poungparn, S.; Kato, S. Common allometric equations for estimating the tree weight of mangroves. J. Trop. Ecol. 2005, 21, 471–477. [Google Scholar] [CrossRef]
- Fromard, F.; Puig, H.; Mougin, E.; Marty, G.; Betoulle, J.; Cadamuro, L. Structure, above-ground biomass and dynamics of mangrove ecosystems: New data from french guiana. Oecologia 1998, 115, 39–53. [Google Scholar] [CrossRef]
- Ong, J.E.; Gong, W.K.; Wong, C.H. Allometry and partitioning of the mangrove, rhizophora apiculata. For. Ecol. Manag. 2004, 188, 395–408. [Google Scholar] [CrossRef]
- Kusmana, C.; Hidayat, T.; Tiryana, T.; Rusdiana, O.; Istomo. Allometric models for above- and below-ground biomass of Sonneratia spp. Glob. Ecol. Conserv. 2018, 15, e00417. [Google Scholar] [CrossRef]
- Chowdhury, M.Q.; Deb, J.C.; Sonet, S.S. Timber species grouping in bangladesh: Linking wood properties. Wood Sci. Technol. 2013, 47, 797–813. [Google Scholar] [CrossRef]
- Zhao, X.; Guo, Q.; Su, Y.; Xue, B. Improved progressive tin densification filtering algorithm for airborne lidar data in forested areas. ISPRS J. Photogramm. Remote Sens. 2016, 117, 79–91. [Google Scholar] [CrossRef]
- Wan-Mohd-Jaafar, W.; Woodhouse, I.; Silva, C.; Omar, H.; Hudak, A. Modelling individual tree aboveground biomass using discrete return lidar in lowland dipterocarp forest of Malaysia. J. Trop. For. Sci. 2017, 29, 465–484. [Google Scholar]
- Shi, Y.; Wang, T.; Skidmore, A.K.; Heurich, M. Important lidar metrics for discriminating forest tree species in central europe. ISPRS J. Photogramm. Remote Sens. 2018, 137, 163–174. [Google Scholar] [CrossRef]
- Liu, K.; Shen, X.; Cao, L.; Wang, G.; Cao, F. Estimating forest structural attributes using uav-lidar data in ginkgo plantations. ISPRS J. Photogramm. Remote Sens. 2018, 146, 465–482. [Google Scholar] [CrossRef]
- Owers, C.J.; Rogers, K.; Woodroffe, C.D. Terrestrial laser scanning to quantify above-ground biomass of structurally complex coastal wetland vegetation. Estuar. Coast. Shelf Sci. 2018, 204, 164–176. [Google Scholar] [CrossRef] [Green Version]
- Hilker, T.; Frazer, G.W.; Coops, N.C.; Wulder, M.A.; Newnham, G.J.; Stewart, J.D.; Leeuwen, M.; Culvenor, D.S. Prediction of wood fiber attributes from lidar-derived forest canopy indicators. For. Sci. 2013, 59, 231–242. [Google Scholar] [CrossRef]
- Duro, D.C.; Franklin, S.E.; Dubé, M.G. A comparison of pixel-based and object-based image analysis with selected machine learning algorithms for the classification of agricultural landscapes using spot-5 hrg imagery. Remote Sens. Environ. 2012, 118, 259–272. [Google Scholar] [CrossRef]
- Wang, D.; Wan, B.; Qiu, P.; Su, Y.; Guo, Q.; Wang, R.; Sun, F.; Wu, X. Evaluating the performance of sentinel-2, landsat 8 and pléiades-1 in mapping mangrove extent and species. Remote Sens. 2018, 10, 1468. [Google Scholar] [CrossRef]
- Kamal, M.; Phinn, S.; Johansen, K. Object-based approach for multi-scale mangrove composition mapping using multi-resolution image datasets. Remote Sens. 2015, 7, 4753–4783. [Google Scholar] [CrossRef]
- Yin, D.; Wang, L. Individual mangrove tree measurement using uav-based lidar data: Possibilities and challenges. Remote Sens. Environ. 2019, 223, 34–49. [Google Scholar] [CrossRef]
- Belgiu, M.; Dragut, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Shao, Z.; Fu, H.; Li, D.; Altan, O.; Cheng, T. Remote sensing monitoring of multi-scale watersheds impermeability for urban hydrological evaluation. Remote Sens. Environ. 2019, 232, 111338. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Gregorutti, B.; Michel, B.; Saint-Pierre, P. Correlation and variable importance in random forests. Stat. Comput. 2017, 27, 659–678. [Google Scholar] [CrossRef]
- Chen, W.; Li, X.; Wang, Y.; Chen, G.; Liu, S. Forested landslide detection using lidar data and the random forest algorithm: A case study of the three gorges, China. Remote Sens. Environ. 2014, 152, 291–301. [Google Scholar] [CrossRef]
- Stehman, S.V. Thematic map accuracy assessment from the perspective of finite population sampling. Int. J. Remote Sens. 1995, 16, 589–593. [Google Scholar] [CrossRef]
- Jia, M.M.; Liu, M.Y.; Wang, Z.M.; Mao, D.H.; Ren, C.Y.; Cui, H.S. Evaluating the effectiveness of conservation on mangroves: A remote sensing-based comparison for two adjacent protected areas in Shenzhen and Hong Kong, China. Remote Sens. 2016, 8, 627. [Google Scholar] [CrossRef]
- Zhu, X.; Hou, Y.; Weng, Q.; Chen, L. Integrating uav optical imagery and lidar data for assessing the spatial relationship between mangrove and inundation across a subtropical estuarine wetland. ISPRS J. Photogramm. Remote Sens. 2019, 149, 146–156. [Google Scholar] [CrossRef]
- Hutchison, J.; Manica, A.; Swetnam, R.; Balmford, A.; Spalding, M. Predicting global patterns in mangrove forest biomass. Conserv. Lett. 2014, 7, 233–240. [Google Scholar] [CrossRef]
- Twilley, R.R.; Chen, R.H.; Hargis, T. Carbon sinks in mangroves and their implications to carbon budget of tropical coastal ecosystems. Water Air Soil Pollut. 1992, 64, 265–288. [Google Scholar] [CrossRef]
- Simard, M.; Zhang, K.; Rivera-Monroy, V.H.; Ross, M.S.; Ruiz, P.L.; Castañeda-Moya, E.; Twilley, R.R.; Rodriguez, E. Mapping height and biomass of mangrove forests in everglades national park with srtm elevation data. Photogramm. Eng. Remote Sens. 2006, 72, 299–311. [Google Scholar] [CrossRef]
- Simard, M.; Rivera-Monroy, V.H.; Mancera-Pineda, J.E.; Castañeda-Moya, E.; Twilley, R.R. A systematic method for 3d mapping of mangrove forests based on shuttle radar topography mission elevation data, icesat/glas waveforms and field data: Application to Ciénaga Grande de Santa Marta, Colombia. Remote Sens. Environ. 2008, 112, 2131–2144. [Google Scholar] [CrossRef]
- Saenger, P.; Snedaker, S.C. Pantropical trends in mangrove above-ground biomass and annual litterfall. Oecologia 1993, 96, 293–299. [Google Scholar] [CrossRef] [Green Version]
- Wang, M.; Cao, W.Z.; Guan, Q.S.; Wu, G.J.; Wang, F.F. Assessing changes of mangrove forest in a coastal region of southeast china using multi-temporal satellite images. Estuar. Coast. Shelf Sci. 2018, 207, 283–292. [Google Scholar] [CrossRef]
- Jiang, L.; Yang, D.; Mei, L.; Yang, X. Remote sensing estimation of carbon storage of mangrove communities in shenzhen city. Wetl. Sci. 2018, 16, 618–625. [Google Scholar]
- Hickey, S.M.; Callow, N.J.; Phinn, S.; Lovelock, C.E.; Duarte, C.M. Spatial complexities in aboveground carbon stocks of a semi-arid mangrove community: A remote sensing height-biomass-carbon approach. Estuar. Coast. Shelf Sci. 2018, 200, 194–201. [Google Scholar] [CrossRef] [Green Version]
- Fatoyinbo, T.E.; Simard, M. Height and biomass of mangroves in africa from icesat/glas and srtm. Int. J. Remote Sens. 2013, 34, 668–681. [Google Scholar] [CrossRef]
- Hamilton, S.E.; Casey, D. Creation of a high spatio-temporal resolution global database of continuous mangrove forest cover for the 21st century (cgmfc-21). Glob. Ecol. Biogeogr. 2016, 25, 729–738. [Google Scholar] [CrossRef]
- Polidoro, B.A.; Carpenter, K.E.; Collins, L.; Duke, N.C.; Ellison, A.M.; Ellison, J.C.; Farnsworth, E.J.; Fernando, E.S.; Kathiresan, K.; Koedam, N.E. The loss of species: Mangrove extinction risk and geographic areas of global concern. PLoS ONE 2010, 5, e10095. [Google Scholar] [CrossRef]
- Ene, L.T.; Gobakken, T.; Andersen, H.E.; Naesset, E.; Cook, B.D.; Morton, D.C.; Babcock, C.; Nelson, R. Large-area hybrid estimation of aboveground biomass in interior alaska using airborne laser scanning data. Remote Sens. Environ. 2018, 204, 741–755. [Google Scholar] [CrossRef]
- Réjou-Méchain, M.; Barbier, N.; Couteron, P.; Ploton, P.; Vincent, G.; Herold, M.; Mermoz, S.; Saatchi, S.; Chave, J.; de Boissieu, F. Upscaling forest biomass from field to satellite measurements: Sources of errors and ways to reduce them. Surv. Geophys. 2019, 40, 881–911. [Google Scholar] [CrossRef]
- Zhang, L.; Shao, Z.; Liu, J.; Cheng, Q. Deep learning based retrieval of forest aboveground biomass from combined lidar and landsat 8 data. Remote Sens. 2019, 11, 1459. [Google Scholar] [CrossRef]
- Dash, J.; Curran, P.J. The meris terrestrial chlorophyll index. Int. J. Remote Sens. 2004, 25, 5403–5413. [Google Scholar] [CrossRef]
- Pastor-Guzman, J.; Atkinson, P.M.; Dash, J.; Rioja-Nieto, R. Spatiotemporal variation in mangrove chlorophyll concentration using landsat 8. Remote Sens. 2015, 7, 14530–14558. [Google Scholar] [CrossRef]
- Zhu, Y.; Liu, K.; Liu, L.; Wang, S.; Liu, H. Retrieval of mangrove aboveground biomass at the individual species level with worldview-2 images. Remote Sens. 2015, 7, 12192–12214. [Google Scholar] [CrossRef]
- Adelabu, S.; Mutanga, O.; Adam, E.; Sebego, R. Spectral discrimination of insect defoliation levels in mopane woodland using hyperspectral data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 7, 177–186. [Google Scholar] [CrossRef]
- Wang, L.; Sousa, W.P. Distinguishing mangrove species with laboratory measurements of hyperspectral leaf reflectance. Int. J. Remote Sens. 2009, 30, 1267–1281. [Google Scholar] [CrossRef]
- Bouvier, M.; Durrieu, S.; Fournier, R.A.; Renaud, J.-P. Generalizing predictive models of forest inventory attributes using an area-based approach with airborne lidar data. Remote Sens. Environ. 2015, 156, 322–334. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Gritz., Y.; Merzlyak, M.N. Relationships between leaf chlorophyll content and spectral reflectance and algorithms for non-destructive chlorophyll assessment in higher plant leaves. J. Plant Physiol. 2003, 160, 271–282. [Google Scholar] [CrossRef]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the radiometric and biophysical performance of the modis vegetation indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Valderrama-Landeros, L.; Flores-de-Santiago, F.; Kovacs, J.M.; Flores-Verdugo, F. An assessment of commonly employed satellite-based remote sensors for mapping mangrove species in mexico using an ndvi-based classification scheme. Environ. Monit. Assess. 2018, 190, 13. [Google Scholar] [CrossRef]
- Wicaksono, P.; Danoedoro, P.; Hartono; Nehren, U. Mangrove biomass carbon stock mapping of the karimunjawa islands using multispectral remote sensing. Int. J. Remote Sens. 2016, 37, 26–52. [Google Scholar] [CrossRef]
- Daughtry, C.; Walthall, C.; Kim, M.; De Colstoun, E.B.; McMurtrey, J., III. Estimating corn leaf chlorophyll concentration from leaf and canopy reflectance. Remote Sens. Environ. 2000, 74, 229–239. [Google Scholar] [CrossRef]
- Fernandez-Manso, A.; Fernandez-Manso, O.; Quintano, C. Sentinel-2a red-edge spectral indices suitability for discriminating burn severity. Int. J. Appl. Earth Obs. Geoinf. 2016, 50, 170–175. [Google Scholar] [CrossRef]
- Blackburn, G.A. Spectral indices for estimating photosynthetic pigment concentrations: A test using senescent tree leaves. Int. J. Remote Sens. 1998, 19, 657–675. [Google Scholar] [CrossRef]
- Frampton, W.J.; Dash, J.; Watmough, G.; Milton, E.J. Evaluating the capabilities of sentinel-2 for quantitative estimation of biophysical variables in vegetation. ISPRS J. Photogramm. Remote Sens. 2013, 82, 83–92. [Google Scholar] [CrossRef]
- Ji, L.; Zhang, L.; Wylie, B. Analysis of dynamic thresholds for the normalized difference water index. Photogramm. Eng. Remote Sens. 2009, 75, 1307–1317. [Google Scholar] [CrossRef]











| Species | Allometric Equation | Country | Reference |
|---|---|---|---|
| A. corniculatum | China | [27] | |
| A. marina1 | China | [28] | |
| B. sexangula | Australia | [29] | |
| C. tagal | Australia | [29] | |
| E. agallocha | Bangladesh | [30] | |
| H. littoralis2 H. tiliaceus2 | Thailand Indonesia | [31] | |
| K. candel | China | [27] | |
| L. racemosa | Guiana, French | [32] | |
| R. apiculata | Malaysia | [33] | |
| R. stylosa | Australia | [29] | |
| S. apetala3 | Thailand Indonesia | [31] | |
| Sonneratia spp.4 | Indonesia | [34] | |
| X. granatum | Australia | [29] |
| Mangroves | Non-Mangroves | UA | |
|---|---|---|---|
| mangrove | 193 | 7 | 96.50% |
| non-mangroves | 1 | 199 | 99.50% |
| PA | 99.48% | 96.60% | |
| Kappa: 0.96 | OA: 98.00% |
| Model | Number | Selected Features | |
|---|---|---|---|
| Height | LiDAR~S2 | 6 | B2, B11, B12, MDI1, MNDWI, MTCI |
| AGB | G~LiDAR | 11 | CC1.3, CTHK, D01, H05, H10, H80, H95, H90, HIQ, HSD, HVAR |
| 12 | B2, B7, B11, B12, MDI1, MDI2, MCARI, MNDWI, MTCI, NDVIre2, NDVIre3, S2REP | ||
| G~S2 | 14 | B2, B3, B4, B5, B11, CIre1, CIre3, EVI, MDI1, MNDWI, MTCI, NDVIre2, NDVIre1, SR |
| Method | Model | Calibration | Validation | |||
|---|---|---|---|---|---|---|
| R2 | RMSE (%) | R2 | RMSE (%) | |||
| Height | UAV-LiDAR sampling | LiDAR~S2 | 0.66 | 1.99 (27.26%) | 0.67 | 1.90 (26.24%) |
| AGB | UAV-LiDAR sampling | G~LiDAR | 0.80 | 40.54 (28.13%) | 0.78 | 42.29 (29.35%) |
| 0.67 | 41.29 (28.65%) | 0.62 | 50.36 (35.41%) | |||
| Traditional | G~S2 | 0.48 | 64.92 (45.05%) | 0.52 | 56.63 (39.82%) | |
| Districts | Area(ha) | Total AGB (Mg) | Mean AGB (Mg ha−1) | Min AGB (Mg ha−1) | Max AGB (Mg ha−1) | SD AGB (Mg ha−1) | Mean H (m) | Min H (m) | Max H (m) | SD H (m) | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | Haikou | 1508.14 | 160,565.38 | 106.47 | 14.00 | 268.20 | 45.22 | 5.93 | 2.03 | 10.75 | 1.91 |
| 2 | Wenchang | 1036.03 | 155,462.22 | 150.06 | 14.59 | 291.24 | 48.17 | 8.23 | 2.10 | 17.11 | 2.30 |
| 3 | Danzhou | 539.49 | 72,331.96 | 134.07 | 15.08 | 258.74 | 30.00 | 7.32 | 2.12 | 15.09 | 1.58 |
| 4 | Chengmai | 224.47 | 30,619.86 | 136.41 | 24.19 | 216.92 | 22.48 | 7.12 | 2.98 | 10.15 | 0.93 |
| 5 | Lingao | 151.39 | 19,265.79 | 127.26 | 18.08 | 221.96 | 30.84 | 6.70 | 2.31 | 9.21 | 1.05 |
| 6 | Sanya | 117.51 | 17,091.89 | 145.45 | 51.19 | 255.15 | 28.32 | 7.17 | 3.09 | 15.30 | 1.93 |
| 7 | Dongfang | 77.26 | 11,998.73 | 155.30 | 59.72 | 222.37 | 18.44 | 8.06 | 3.56 | 10.65 | 0.90 |
| 8 | Lingshui | 25.99 | 3781.29 | 145.49 | 39.16 | 266.72 | 31.22 | 7.56 | 3.21 | 14.45 | 1.74 |
| 9 | Qionghai | 16.74 | 3082.20 | 184.12 | 86.03 | 263.80 | 25.17 | 9.88 | 4.24 | 14.11 | 1.15 |
| SUM | Hainan Island | 3697.02 | 474,199.31 | 128.27 | 14.01 | 291.24 | 45.87 | 6.99 | 2.03 | 17.11 | 2.14 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, D.; Wan, B.; Qiu, P.; Zuo, Z.; Wang, R.; Wu, X. Mapping Height and Aboveground Biomass of Mangrove Forests on Hainan Island Using UAV-LiDAR Sampling. Remote Sens. 2019, 11, 2156. https://doi.org/10.3390/rs11182156
Wang D, Wan B, Qiu P, Zuo Z, Wang R, Wu X. Mapping Height and Aboveground Biomass of Mangrove Forests on Hainan Island Using UAV-LiDAR Sampling. Remote Sensing. 2019; 11(18):2156. https://doi.org/10.3390/rs11182156
Chicago/Turabian StyleWang, Dezhi, Bo Wan, Penghua Qiu, Zejun Zuo, Run Wang, and Xincai Wu. 2019. "Mapping Height and Aboveground Biomass of Mangrove Forests on Hainan Island Using UAV-LiDAR Sampling" Remote Sensing 11, no. 18: 2156. https://doi.org/10.3390/rs11182156
APA StyleWang, D., Wan, B., Qiu, P., Zuo, Z., Wang, R., & Wu, X. (2019). Mapping Height and Aboveground Biomass of Mangrove Forests on Hainan Island Using UAV-LiDAR Sampling. Remote Sensing, 11(18), 2156. https://doi.org/10.3390/rs11182156