Nonintrusive Depth Estimation of Buried Radioactive Wastes Using Ground Penetrating Radar and a Gamma Ray Detector


Abstract
:
1. Introduction
2. Theoretical Framework
2.1. Approximate 3D Linear Attenuation Model
2.2. Principles of GPR
2.3. Bulk Density Estimation Using GPR
2.3.1. Estimation of the Material’s Permittivity
2.3.2. Permittivity Mixing Formulas
3. Materials and Methods
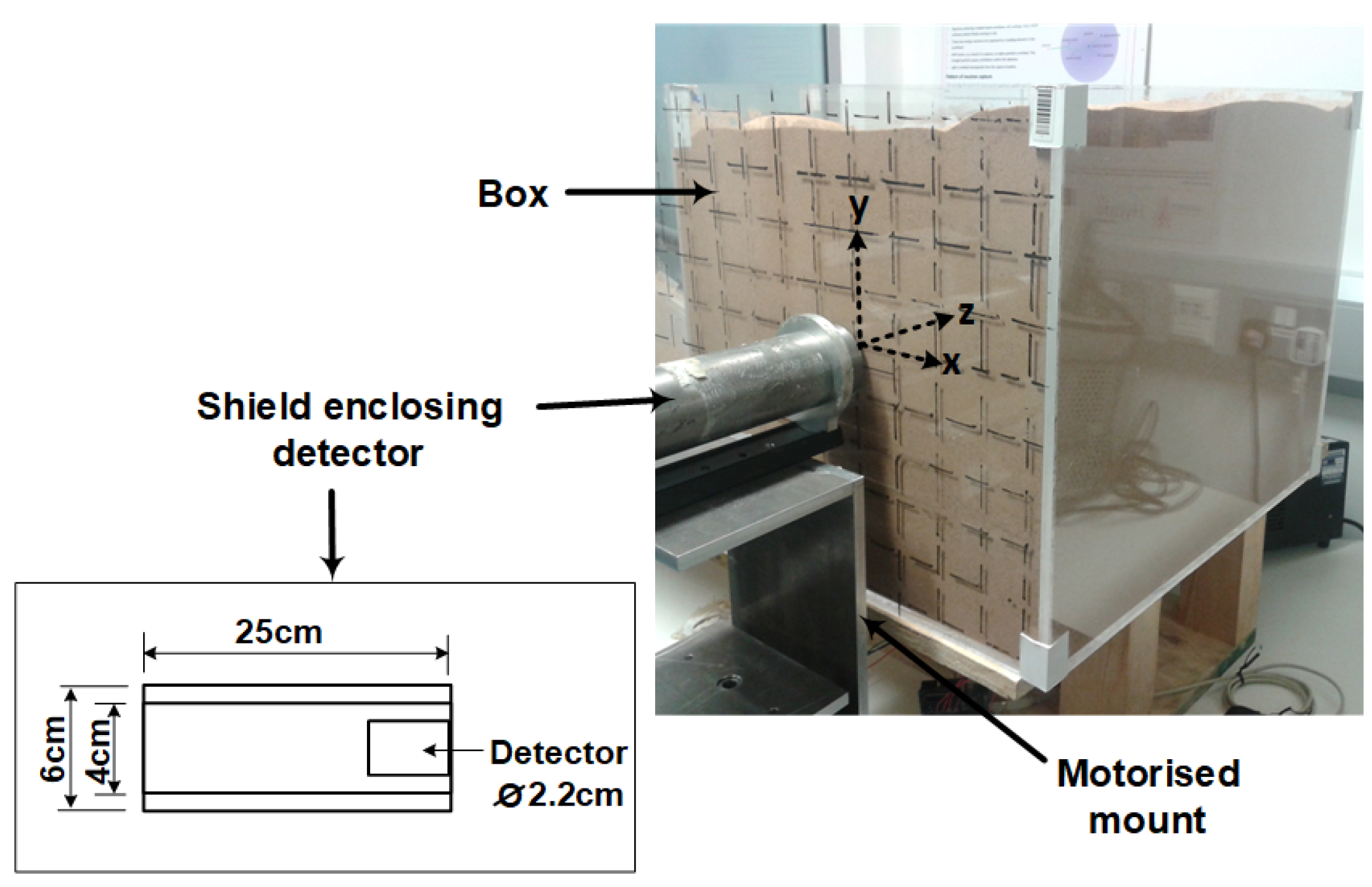
3.1. Gamma Ray Data Acquisition and Processing
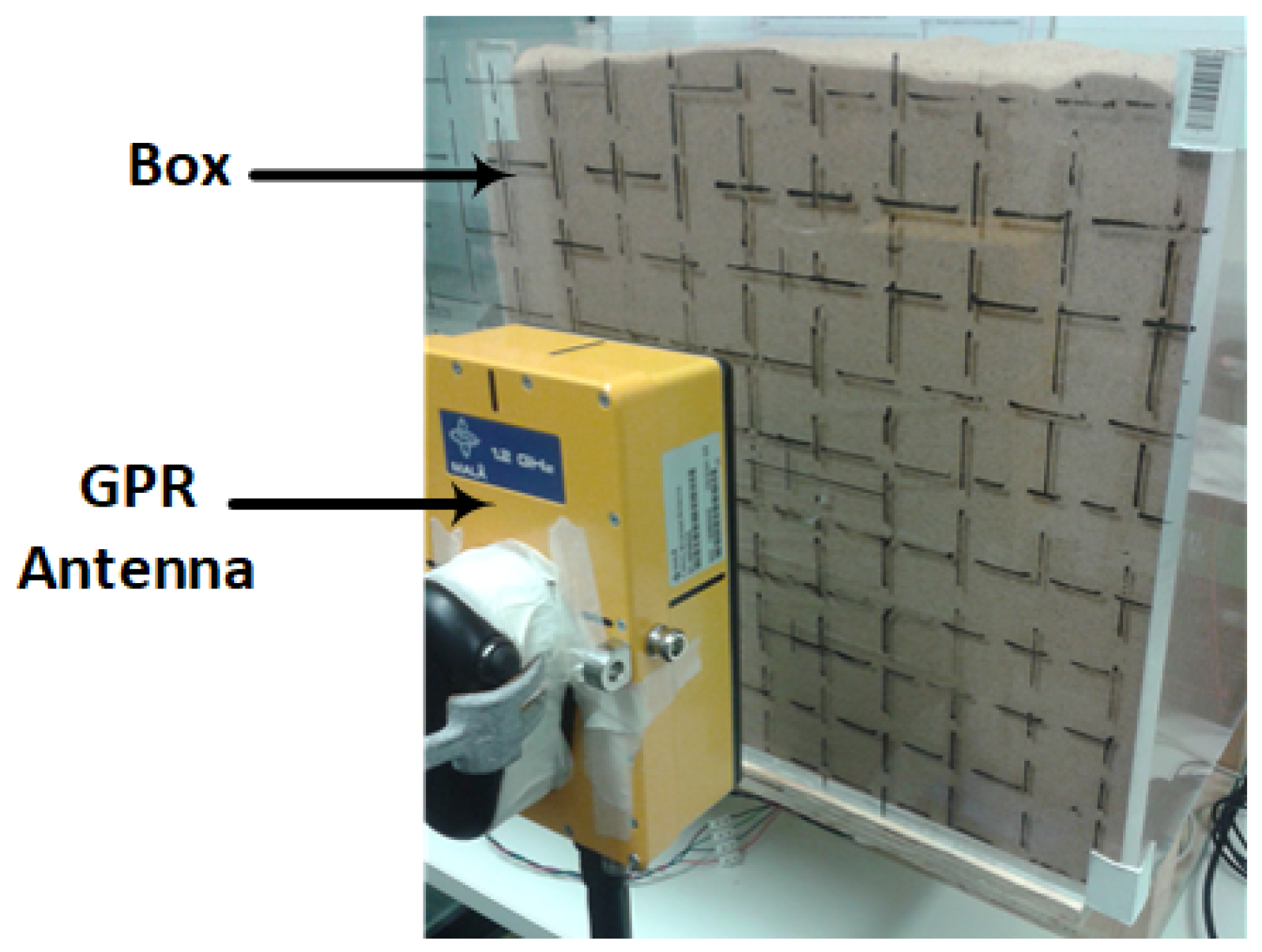
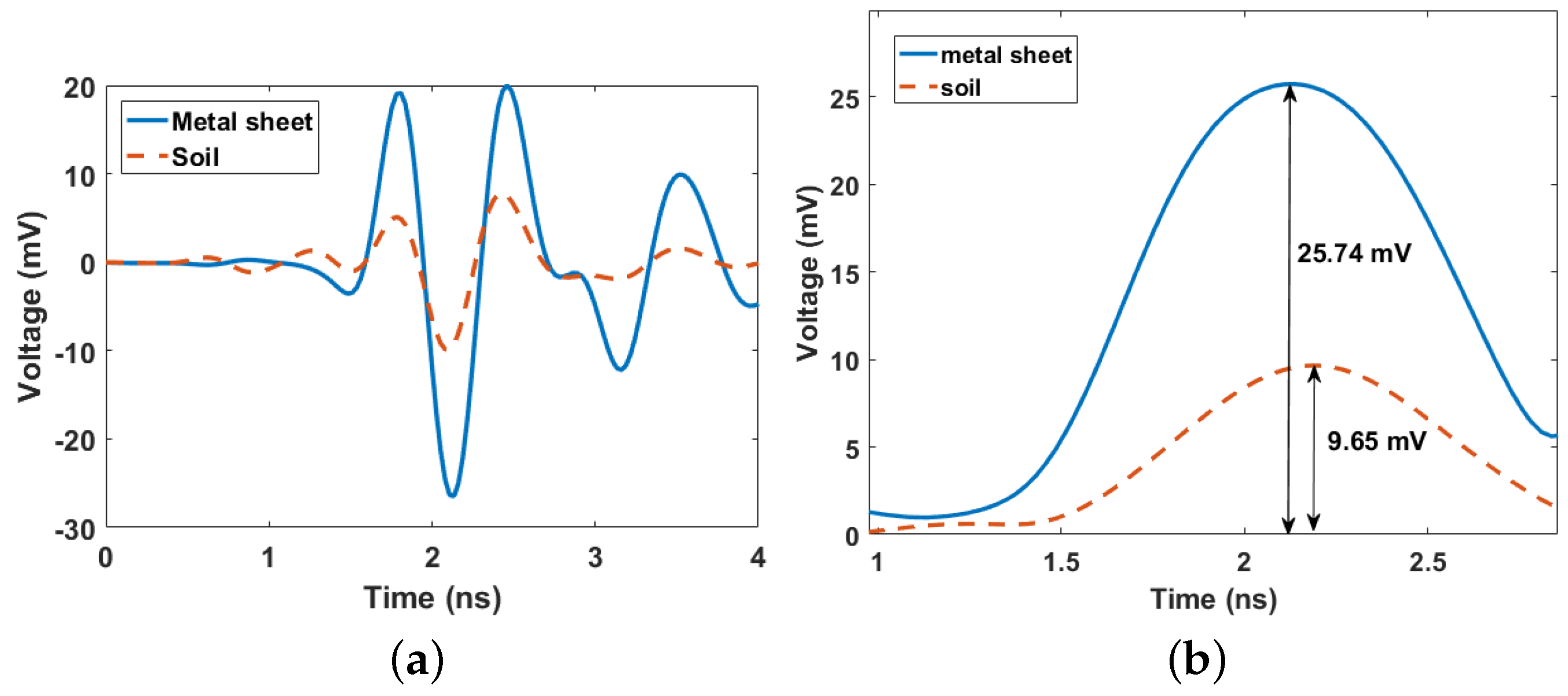
3.2. GPR Data Acquisition and Processing
4. Results
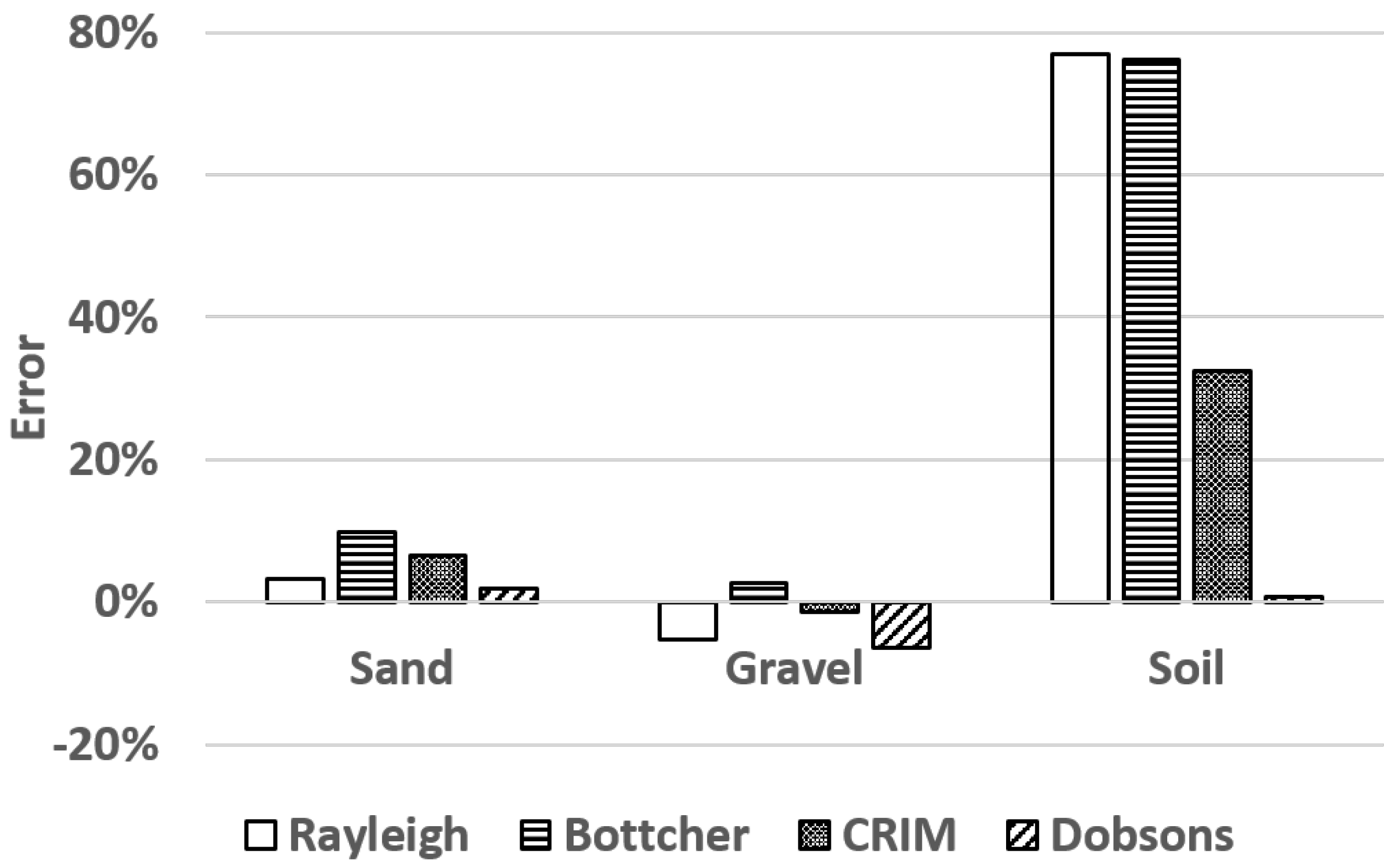
4.1. Bulk Density Estimation
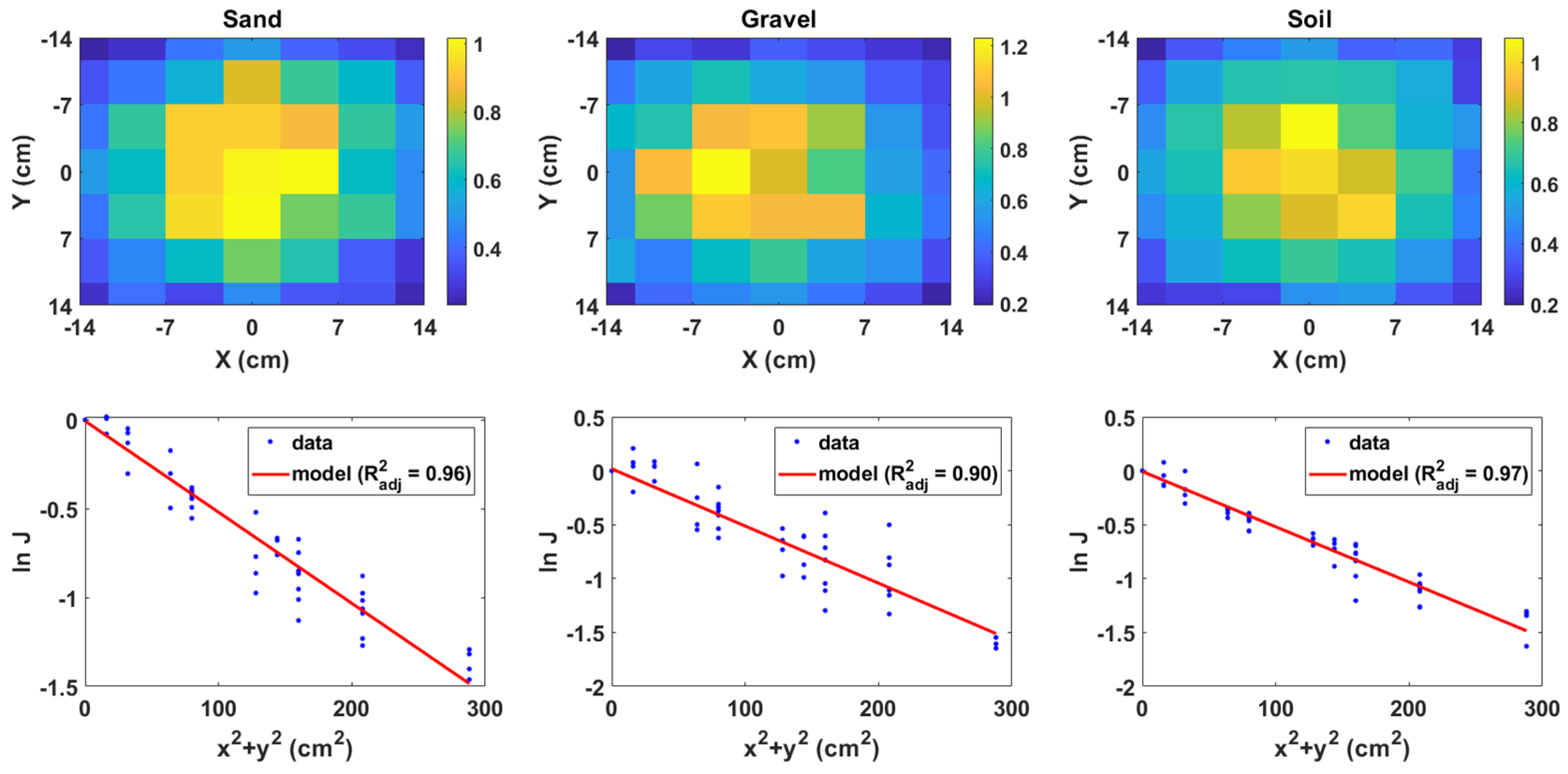
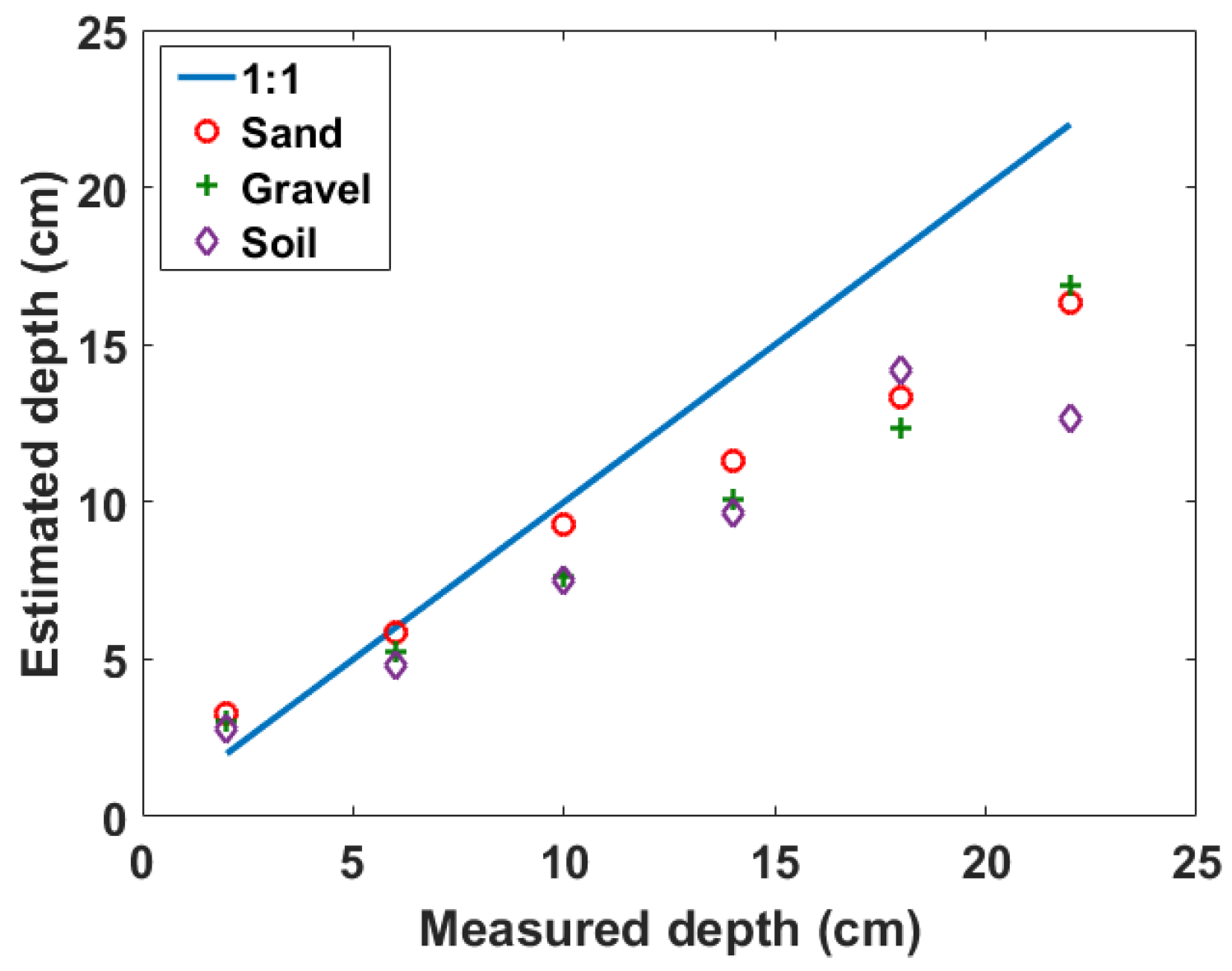
4.2. Depth Estimation of the Buried Cs-137 Radioisotope
5. Discussions
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Laraia, M.T. Nuclear Decommissioning: Planning, Execution and International Experience; Woodhead Publishing Limited: Cambridge, UK, 2012. [Google Scholar]
- Sullivan, P.O.; Nokhamzon, J.G.; Cantrel, E. Decontamination and dismantling of radioactive concrete structures. NEA News 2010, 28, 27–29. [Google Scholar]
- Popp, A.; Ardouin, C.; Alexander, M.; Blackley, R.; Murray, A. Improvement of a high risk category source buried in the grounds of a hospital in Cambodia. In Proceedings of the 13th International Congress of the International Radiation Protection Association, Glasgow, Scotland, 14–18 May 2012; pp. 1–10. [Google Scholar]
- Lal, R.; Fifield, L.; Tims, S.; Wasson, R. 239 Pu fallout across continental Australia: Implications on 239 Pu use as a soil tracer. J. Environ. Radioact. 2017, 178–179, 394–403. [Google Scholar] [CrossRef] [PubMed]
- Varley, A.; Tyler, A.; Dowdall, M.; Bondar, Y.; Zabrotski, V. An in situ method for the high resolution mapping of137Cs and estimation of vertical depth penetration in a highly contaminated environment. Sci. Total Environ. 2017, 605–606, 957–966. [Google Scholar] [CrossRef] [PubMed]
- Penrose, B.; Johnson née Payne, K.A.; Arkhipov, A.; Maksimenko, A.; Gaschak, S.; Meacham, M.C.; Crout, N.J.; White, P.J.; Beresford, N.A.; Broadley, M.R. Inter-cultivar variation in soil-to-plant transfer of radiocaesium and radiostrontium in Brassica oleracea. J. Environ. Radioact. 2016, 155–156, 112–121. [Google Scholar] [CrossRef] [PubMed]
- Adams, J.C.; Mellor, M.; Joyce, M.J. Depth determination of buried caesium-137 and cobalt-60 sources using scatter peak data. IEEE Trans. Nuclear Sci. 2010, 57, 2752–2757. [Google Scholar] [CrossRef]
- Shippen, A.; Joyce, M.J. Profiling the depth of caesium-137 contamination in concrete via a relative linear attenuation model. Appl. Radiat. Isotopes 2010, 68, 631–634. [Google Scholar] [CrossRef] [PubMed]
- Adams, J.C.; Mellor, M.; Joyce, M.J. Determination of the depth of localized radioactive contamination by 137Cs and 60Co in sand with principal component analysis. Environ. Sci. Technol. 2011, 45, 8262–8267. [Google Scholar] [CrossRef]
- Adams, J.C.; Joyce, M.J.; Mellor, M. Depth profiling 137Cs and 60Co non-intrusively for a suite of industrial shielding materials and at depths beyond 50 mm. Appl. Radiat. Isotopes 2012, 70, 1150–1153. [Google Scholar] [CrossRef]
- Adams, J.C.; Joyce, M.J.; Mellor, M. The advancement of a technique using principal component analysis for the non-intrusive depth profiling of radioactive contamination. Nuclear Sci. IEEE Trans. 2012, 59, 1448–1452. [Google Scholar] [CrossRef]
- Haddad, K.; Al-Masri, M.S.; Doubal, A.W. Determination of 226Ra contamination depth in soil using the multiple photopeaks method. J. Environ. Radioact. 2014, 128, 33–37. [Google Scholar] [CrossRef]
- Iwamoto, Y.; Kataoka, J.; Kishimoto, A.; Nishiyama, T.; Taya, T.; Okochi, H.; Ogata, H.; Yamamoto, S. Novel methods for estimating 3D distributions of radioactive isotopes in materials. Nuclear Instrum. Methods Phys. Res. Sect. A Accel. Spectrom. Detect. Assoc. Equip. 2016, 831, 295–300. [Google Scholar] [CrossRef]
- Varley, A.; Tyler, A.; Bondar, Y.; Hosseini, A.; Zabrotski, V.; Dowdall, M. Reconstructing the deposition environment and long-term fate of Chernobyl137Cs at the floodplain scale through mobile gamma spectrometry. Environ. Pollut. 2018, 240, 191–199. [Google Scholar] [CrossRef]
- Dewey, S.C.; Whetstone, Z.D.; Kearfott, K.J. A method for determining the analytical form of a radionuclide depth distribution using multiple gamma spectrometry measurements. J. Environ. Radioact. 2011, 102, 581–588. [Google Scholar] [CrossRef]
- Whetstone, Z.D.; Dewey, S.C.; Kearfott, K.J. Simulation of a method for determining one-dimensional137Cs distribution using multiple gamma spectroscopic measurements with an adjustable cylindrical collimator and center shield. Appl. Radiat. Isotopes 2011, 69, 790–802. [Google Scholar] [CrossRef]
- Varley, A.; Tyler, A.; Smith, L.; Dale, P. Development of a neural network approach to characterise 226Ra contamination at legacy sites using gamma-ray spectra taken from boreholes. J. Environ. Radioact. 2015, 140, 130–140. [Google Scholar] [CrossRef] [PubMed]
- Varley, A.; Tyler, A.; Smith, L.; Dale, P.; Davies, M. Remediating radium contaminated legacy sites: Advances made through machine learning in routine monitoring of “hot” particles. Sci. Total Environ. 2015, 521–522, 270–279. [Google Scholar] [CrossRef] [PubMed]
- Varley, A.; Tyler, A.; Smith, L.; Dale, P.; Davies, M. Mapping the spatial distribution and activity of 226Ra at legacy sites through Machine Learning interpretation of gamma-ray spectrometry data. Sci. Total Environ. 2016, 545–546, 654–661. [Google Scholar] [CrossRef]
- Ukaegbu, I.; Gamage, K. A Novel Method for Remote Depth Estimation of Buried Radioactive Contamination. Sensors 2018, 18, 507. [Google Scholar] [CrossRef] [PubMed]
- Al-Shammary, A.A.G.; Kouzani, A.Z.; Kaynak, A.; Khoo, S.Y.; Norton, M.; Gates, W. Soil Bulk Density Estimation Methods: A Review. Pedosphere 2018, 28, 581–596. [Google Scholar] [CrossRef]
- Tran, A.P.; Andre, F.; Lambot, S. Validation of near-field ground-penetrating radar modeling using full-wave inversion for soil moisture estimation. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5483–5497. [Google Scholar] [CrossRef]
- Algeo, J.; Van Dam, R.L.; Slater, L. Early-Time GPR: A Method to Monitor Spatial Variations in Soil Water Content during Irrigation in Clay Soils. Vadose Zone J. 2016, 15. [Google Scholar] [CrossRef] [Green Version]
- Koyama, C.N.; Liu, H.; Takahashi, K.; Shimada, M.; Watanabe, M.; Khuut, T.; Sato, M. In-situ measurement of soil permittivity at various depths for the calibration and validation of low-frequency SAR soil moisture models by using GPR. Remote Sens. 2017, 9, 580. [Google Scholar] [CrossRef]
- Shamir, O.; Goldshleger, N.; Basson, U.; Reshef, M. Laboratory Measurements of Subsurface Spatial Moisture Content by Ground-Penetrating Radar (GPR) Diffraction and Reflection Imaging of Agricultural Soils. Remote Sens. 2018, 10, 1667. [Google Scholar] [CrossRef]
- Al-Qadi, I.L.; Lahouar, S. Measuring layer thicknesses with GPR - Theory to practice. Constr. Build. Mater. 2005, 19, 763–772. [Google Scholar] [CrossRef]
- Mahmoudzadeh Ardekani, M.R. Off- and on-ground GPR techniques for field-scale soil moisture mapping. Geoderma 2013, 200–201, 55–66. [Google Scholar] [CrossRef]
- Benedetto, A.; Tosti, F.; Ortuani, B.; Giudici, M.; Mele, M. Soil moisture mapping using GPR for pavement applications. In Proceedings of the 7th International Workshop on Advanced Ground Penetrating Radar, Nantes, France, 2–5 July 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Loizos, A.; Plati, C. Accuracy of pavement thicknesses estimation using different ground penetrating radar analysis approaches. NDT E Int. 2007, 40, 147–157. [Google Scholar] [CrossRef]
- Leng, Z.; Al-Qadi, I.L.; Lahouar, S. Development and validation for in situ asphalt mixture density prediction models. NDT E Int. 2011, 44, 369–375. [Google Scholar] [CrossRef]
- Shangguan, P.; Al-Qadi, I.L.; Lahouar, S. Pattern recognition algorithms for density estimation of asphalt pavement during compaction: A simulation study. J. Appl. Geophys. 2014, 107, 8–15. [Google Scholar] [CrossRef]
- Brovelli, A.; Cassiani, G. Effective permittivity of porous media: A critical analysis of the complex refractive index model. Geophys. Prospect. 2008, 56, 715–727. [Google Scholar] [CrossRef]
- Sihvola, A.H. Self-Consistency Aspects of Dielectric Mixing Theories. IEEE Trans. Geosci. Remote Sens. 1989, 27, 403–415. [Google Scholar] [CrossRef]
- Birchak, J.R.; Gardner, C.G.; Hipp, J.E.; Victor, J.M. High Dielectric Constant Microwave Probes for Sensing Soil Moisture. Proc. IEEE 1974, 62, 93–98. [Google Scholar] [CrossRef]
- Roth, K.; Schulin, R.; Hler, H.F.L.; Attinger, W. Calibration of Time Domain Reflectometry for Water Content Measurement. Water Resour. 1990, 26, 2267–2273. [Google Scholar]
- Gardner, C.M.; Dean, T.J.; Cooper, J.D. Soil water content measurement with a high-frequency capacitance sensor. J. Agric. Eng. Res. 1998, 71, 395–403. [Google Scholar] [CrossRef]
- Dobson, M.C.; Ulaby, F.T.; Hallikainen, M.T.; El-Rayes, M.D.A. Microwave Dielectric Behavior of Wet Soil-Part II: Dielectric Mixing Models. IEEE Trans. Geosci. Remote Sens. 1985, GE-23, 35–46. [Google Scholar] [CrossRef]
- Peplinski, N.R.; Ulaby, F.T.; Dobson, M.C. Dielectric Properties of Soils in the 0.3–1.3-GHz Range. IEEE Trans. Geosci. Remote Sens. 1995, 33, 803–807. [Google Scholar] [CrossRef]
- Rayleigh, L. LVI. On the influence of obstacles arranged in rectangular order upon the properties of a medium. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1892, 34, 481–502. [Google Scholar] [CrossRef]
- Bottcher, C.J.F.; Borderwijk, P. Theory of Electric Polarization I1; Elsevier: Amsterdam, The Netherlands, 1978. [Google Scholar]
- McConn, R.; Gesh, C.J.; Pagh, R.; Rucker, R.A.; Williams, R. Compendium of Material Composition Data for Radiation Transport Modelling; Technical Report; Pacific Northwest National Laboratory: Washington, DC, USA, 2011. [Google Scholar]
- National Institute of Standards and Technology. X-ray Mass Attenuation Coefficients; National Institute of Standards and Technology: Gaithersburg, MD, USA, 2004. [Google Scholar]
- Tosti, F.; Bianchini Ciampoli, L.; Calvi, A.; Alani, A.M.; Benedetto, A. An investigation into the railway ballast dielectric properties using different GPR antennas and frequency systems. NDT E Int. 2018, 93, 131–140. [Google Scholar] [CrossRef]
- Schjønning, P.; McBride, R.; Keller, T.; Obour, P. Predicting soil particle density from clay and soil organic matter contents. Geoderma 2017, 286, 83–87. [Google Scholar] [CrossRef]
- Ukaegbu, I.; Gamage, K. A Model for Remote Depth Estimation of Buried Radioactive Wastes Using CdZnTe Detector. Sensors 2018, 18, 1612. [Google Scholar] [CrossRef] [PubMed]
- Mortreau, P.; Berndt, R. Characterisation of cadmium zinc telluride detector spectra—Application to the analysis of spent fuel spectra. Nuclear Instrum. Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2001, 458, 183–188. [Google Scholar] [CrossRef]
- Mätzler, C. Microwave Permittivity of Dry Sand. IEEE Trans. Geosci. Remote Sens. 1998, 36, 317–319. [Google Scholar] [CrossRef]
- Pelowitz, D.B. MCNPX User’s Manual: Version 2.7.0; Los Alamos National Laboratory: Los Alamos, NM, USA, 2011. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sand | 10 mm Gravel | Soil | |
|---|---|---|---|
| Bulk density () (g cm−3) | 1.52 | 1.54 | 1.26 |
| Mass attenuation coefficient () at 662 keV | 0.0776 | 0.0775 | 0.0773 |
| Solid permittivity () | 4.7 | 6.5 | 4.7 |
| Specific density () (g cm−3) | 2.65 | 2.65 | 2.65 |
| Water content () (%) | 0.0 | 0.0 | 6.0 |
| Sand | Gravel | Soil | |
|---|---|---|---|
| Bulk permittivity () | 2.93 | 3.57 | 4.84 |
| Material | |||
|---|---|---|---|
| Sand | 0.99 | ||
| Gravel | 0.99 | ||
| Soil | 0.95 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ukaegbu, I.K.; Gamage, K.A.A.; Aspinall, M.D. Nonintrusive Depth Estimation of Buried Radioactive Wastes Using Ground Penetrating Radar and a Gamma Ray Detector. Remote Sens. 2019, 11, 141. https://doi.org/10.3390/rs11020141
Ukaegbu IK, Gamage KAA, Aspinall MD. Nonintrusive Depth Estimation of Buried Radioactive Wastes Using Ground Penetrating Radar and a Gamma Ray Detector. Remote Sensing. 2019; 11(2):141. https://doi.org/10.3390/rs11020141
Chicago/Turabian StyleUkaegbu, Ikechukwu K., Kelum A. A. Gamage, and Michael D. Aspinall. 2019. "Nonintrusive Depth Estimation of Buried Radioactive Wastes Using Ground Penetrating Radar and a Gamma Ray Detector" Remote Sensing 11, no. 2: 141. https://doi.org/10.3390/rs11020141
APA StyleUkaegbu, I. K., Gamage, K. A. A., & Aspinall, M. D. (2019). Nonintrusive Depth Estimation of Buried Radioactive Wastes Using Ground Penetrating Radar and a Gamma Ray Detector. Remote Sensing, 11(2), 141. https://doi.org/10.3390/rs11020141