Past and Future Trajectories of Farmland Loss Due to Rapid Urbanization Using Landsat Imagery and the Markov-CA Model: A Case Study of Delhi, India

Abstract
:
1. Introduction
2. Study Site and Data
2.1. Study Site
2.2. Data and Pre-Processing
2.3. Image Classification and Accuracy Assessment
3. Methods
3.1. Markov Chain (MC) Model
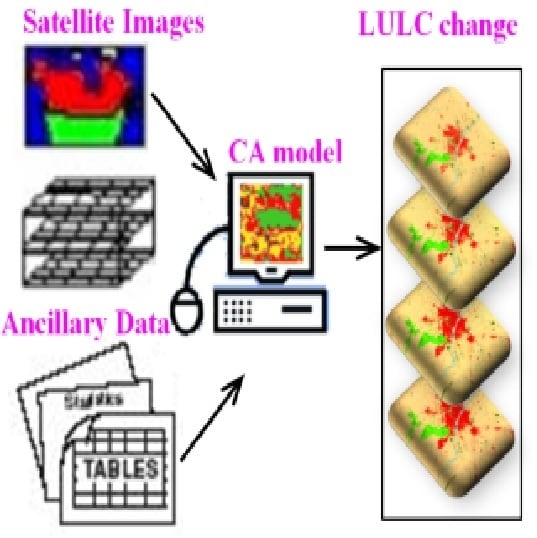
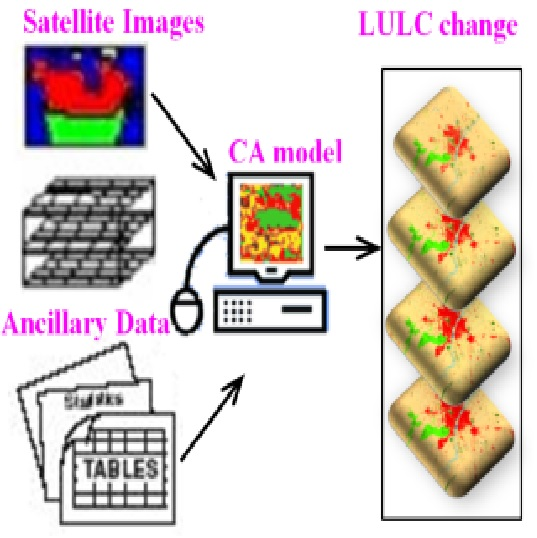
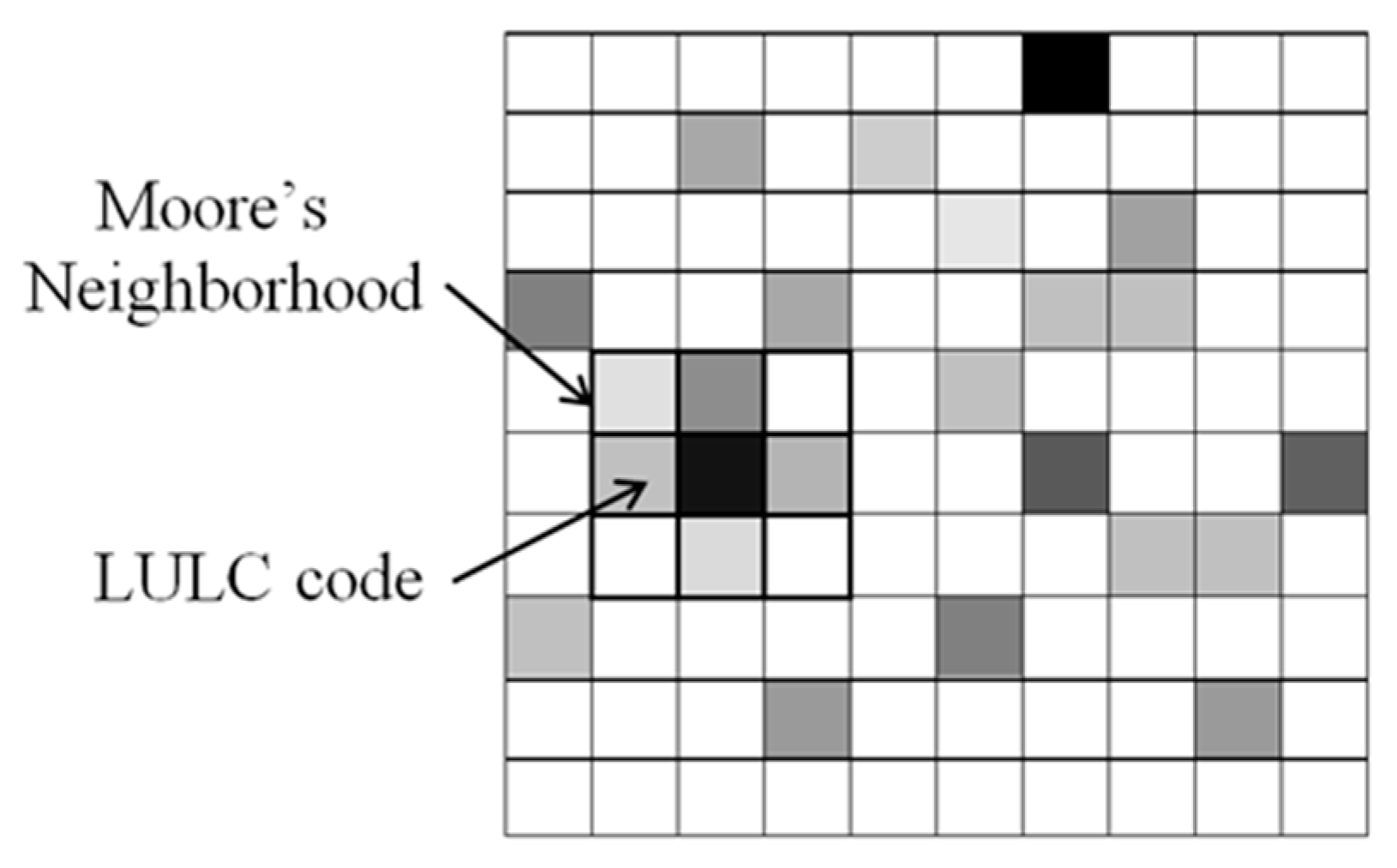
3.2. Cellular Automata (CA) Model
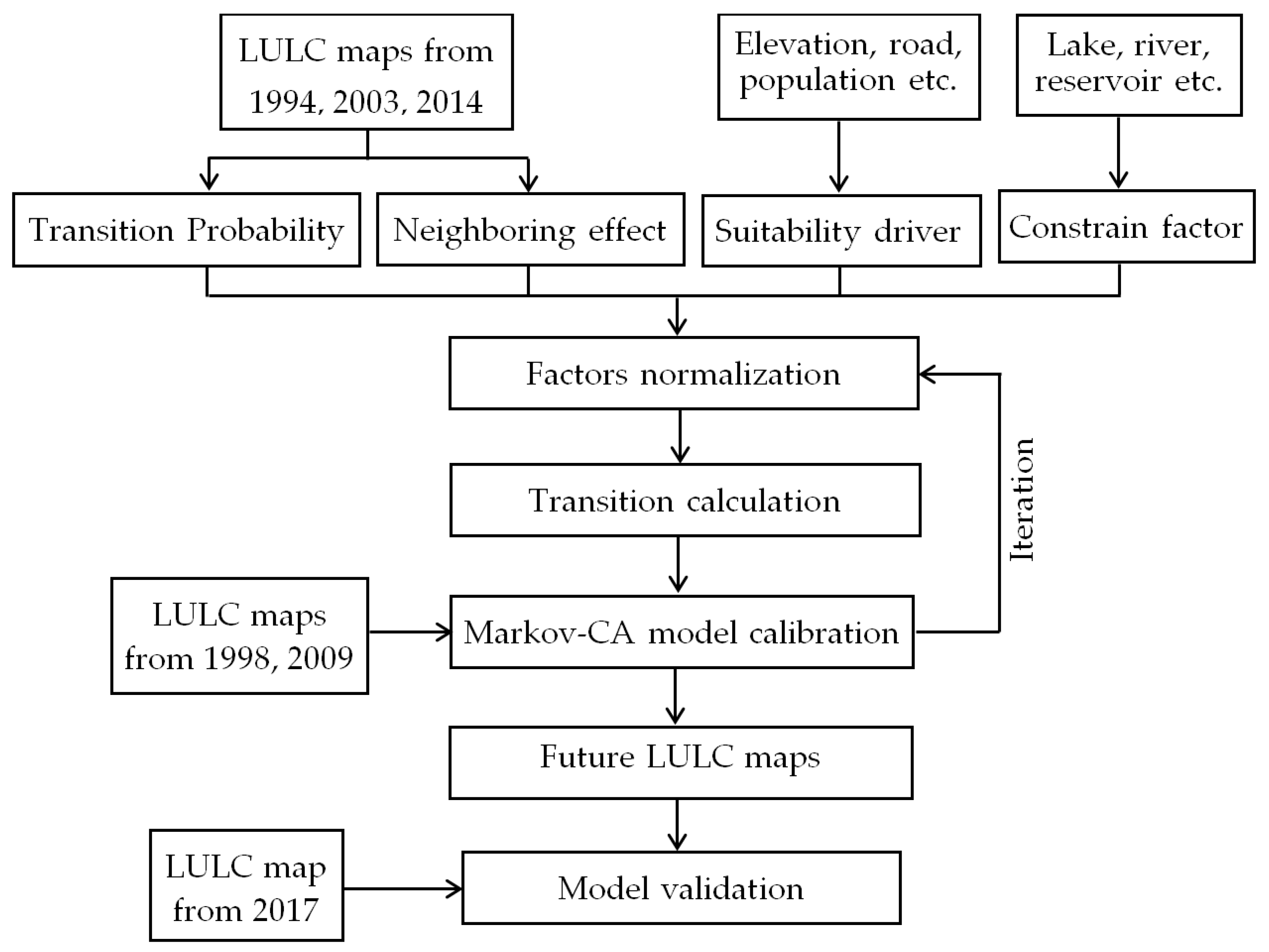
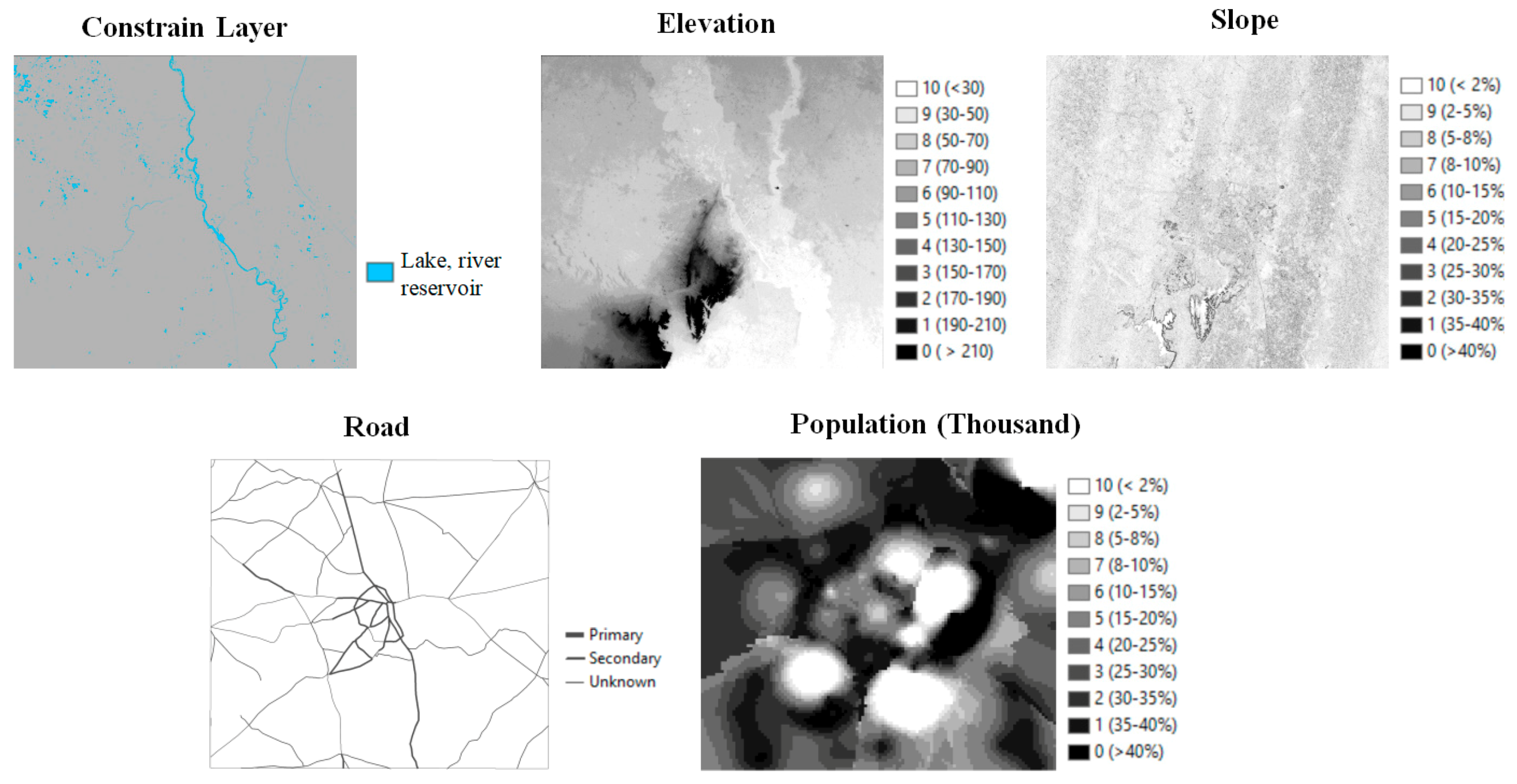
3.3. Integrating Markov-CA and Other Drivers
3.4. Model Calibration and Validation
4. Results and Discussion
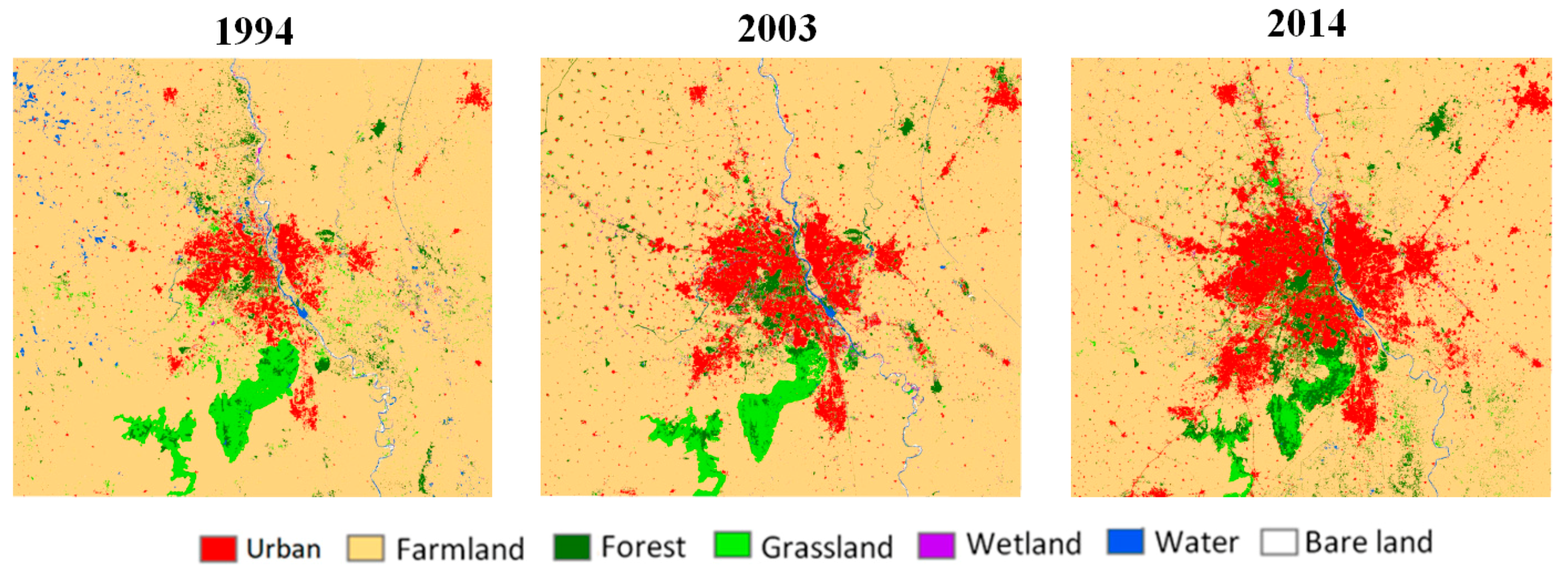
4.1. MC Transition Matrices from the Historical LULC Changes
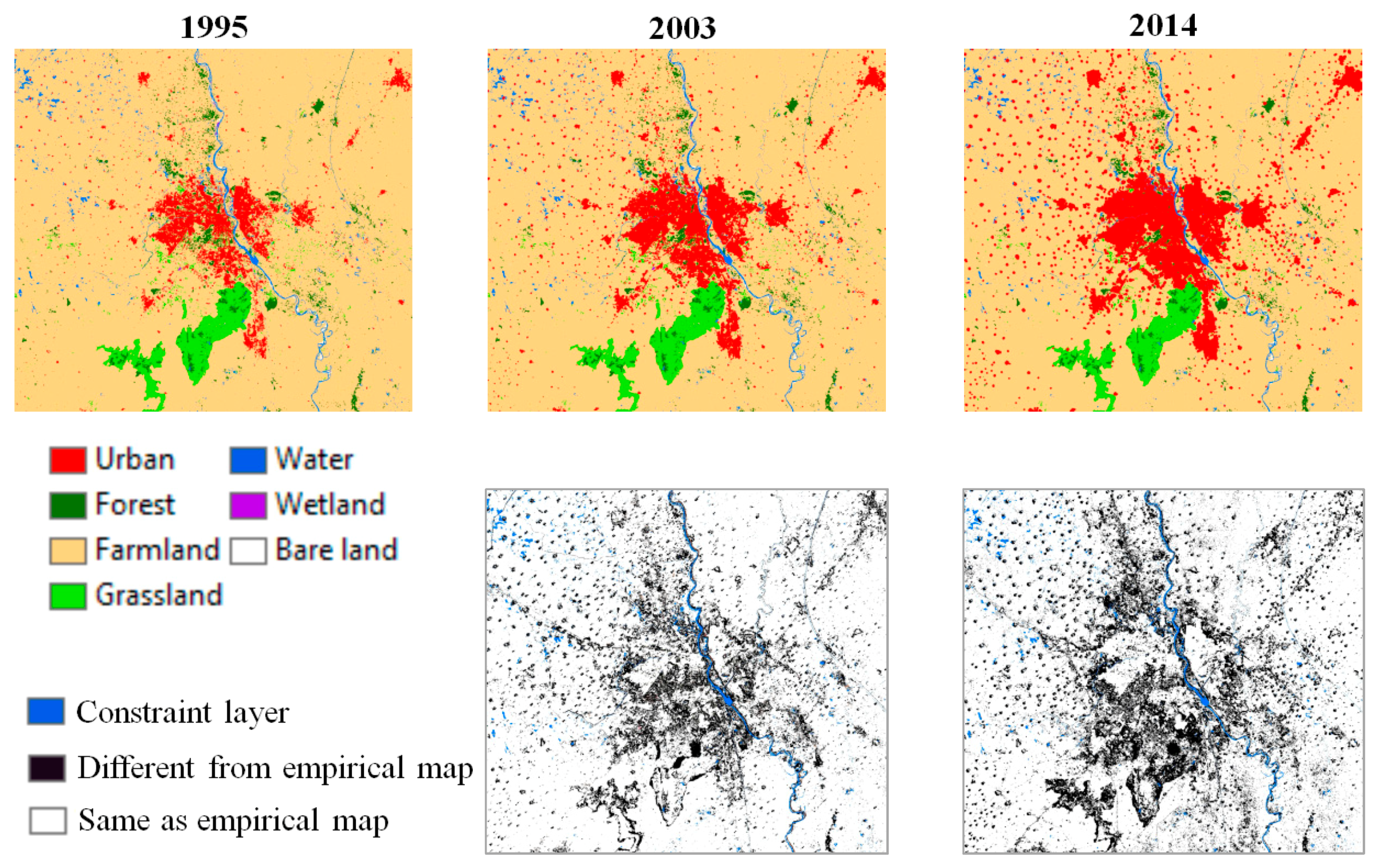
4.2. Predicted LULC Change Using Markov-CA Model
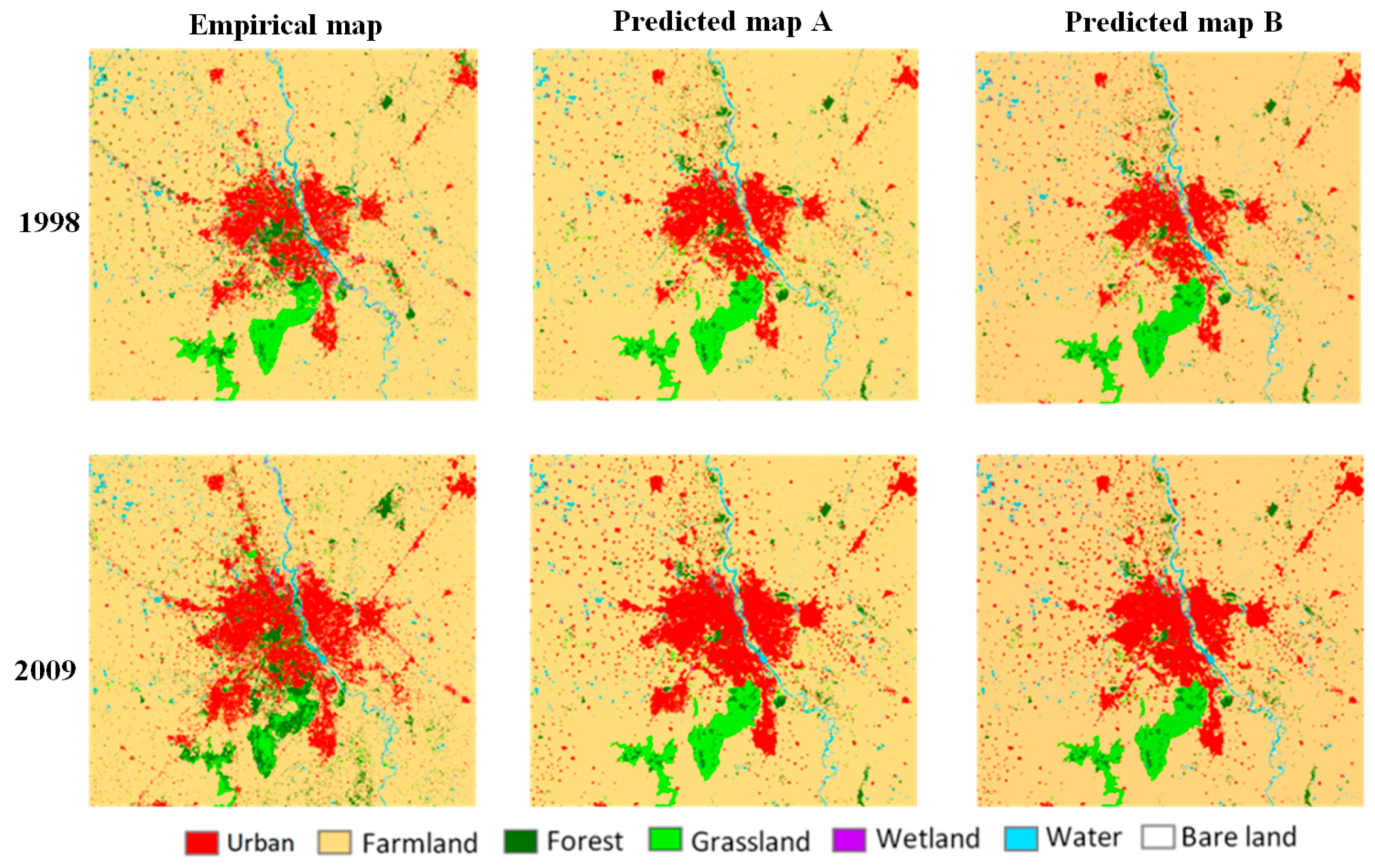
4.3. Model Validation
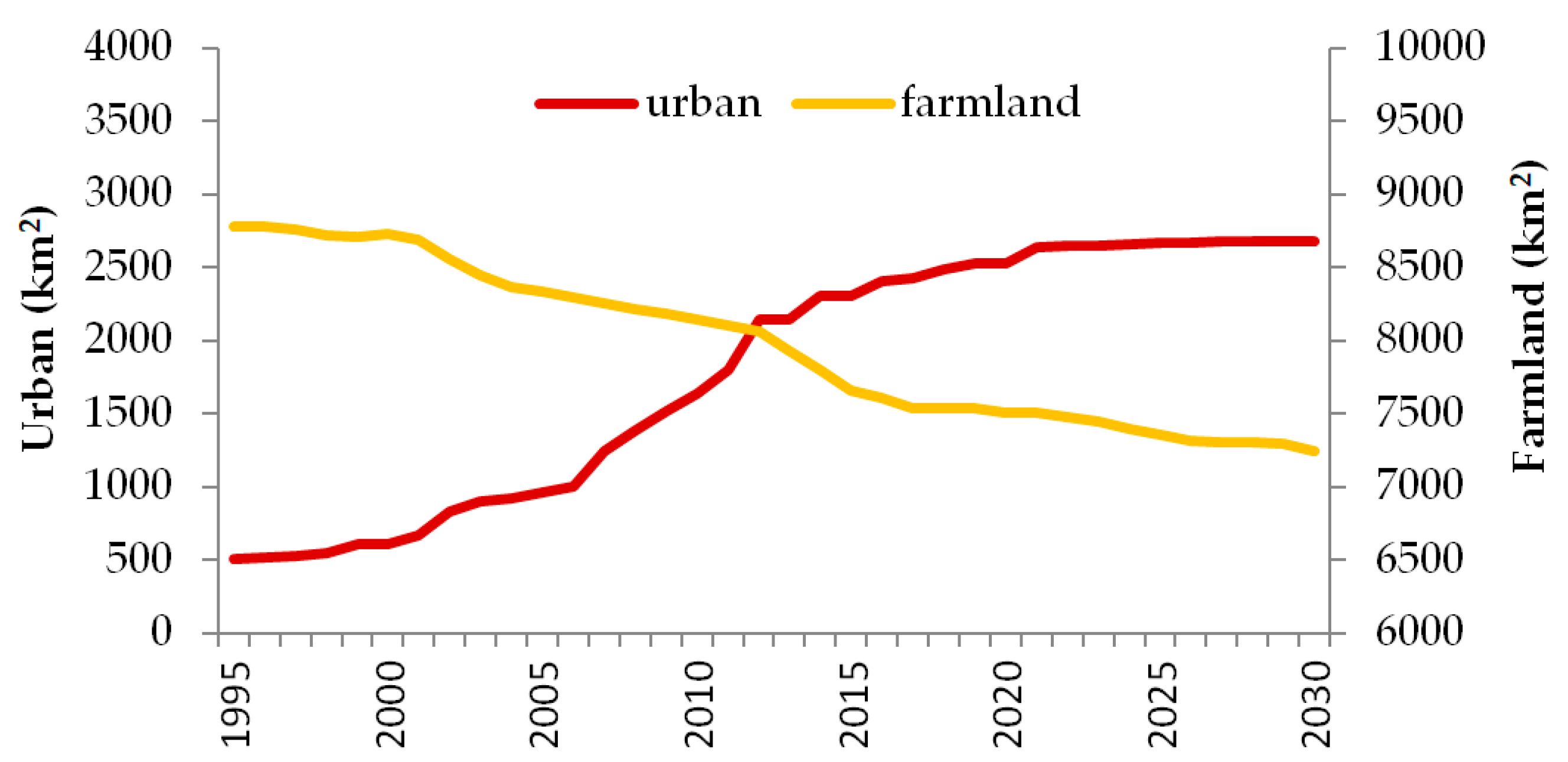
4.4. Future Farmland Trajectories
5. Conclusions
- The accuracy assessment of the model was performed directly by overlaying the predicted result with the classified map. However, the error of the model was accumulated from the data source, data processing, and prediction models. How to develop a more robust method to assess these errors is an interesting topic to be explored;
- The development of the study area was highly related to the rapid urbanization, particularly, population growth and economic development. However, it does not incorporate other important driving factors, such as climate, policy, and other human disturbance. Incorporating more critical factors will improve our model prediction in te future work;
- Although multiple socioeconomic drivers were considered in our model, we treated each variable equally by calculating the different membership between the center cell and its neighbor cells at the same time (Equation (5)). Treating these variables differently and assigning different weights to different socioeconomic factors will improve our model accuracy in the future;
- The model incorporated the driving factors through the neighborhood effect and Markov transition probability linearly. This linear combination may be not true in reality and needs more study to improve it. Finding dynamic and appropriate model parameters will improve this model and is recommended for future study.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mohan, M.; Pathan, S.K.; Narendrareddy, K.; Kandya, A.; Pandey, S. Dynamics of urbanization and its impact on land-use/land-cover: A case study of megacity Delhi. J. Environ. Prot. 2011, 2, 1274–1283. [Google Scholar] [CrossRef]
- Tang, J.; Di, L.; Xiao, J.; Lu, D.; Zhou, Y. Impacts of land use and socioeconomic patterns on urban heat island. Int. J. Remote Sens. 2017, 38, 3445–3465. [Google Scholar] [CrossRef]
- United Nations. World’s Population Increasingly Urban with More Than Half Living in Urban Areas. Available online: http://www.un.org/en/development/desa/news/population/world-urbanization-prospects-2014.html (accessed on 7 March 2018).
- Kalnay, E.; Cai, M. Impact of urbanization and land-use change on climate. Nature 2003, 423, 528–531. [Google Scholar] [CrossRef] [PubMed]
- Grimm, N.B.; Faeth, S.H.; Golubiewski, N.E.; Redman, C.L.; Wu, J.; Bai, X.; Briggs, J.M. Global change and the ecology of cities. Science 2008, 319, 756–760. [Google Scholar] [CrossRef] [PubMed]
- Tang, J.; Wang, L.; Yao, Z. Analyses of urban landscape dynamics using multi-temporal satellite images: A comparison of two petroleum-oriented cities. Landsc. Urban Plan. 2008, 87, 269–278. [Google Scholar] [CrossRef]
- Deng, J.S.; Wang, K.; Hong, Y.; Qi, J.G. Spatio-temporal dyanmics and evolution of land use change and landscape pattern in response to rapid urbanization. Landsc. Urban Plan. 2009, 92, 187–198. [Google Scholar] [CrossRef]
- Jiang, L.; O’Neill, B.C. Global urbanization projections for the shared socioeconomic pathways. Glob. Environ. Chang. 2017, 42, 193–199. [Google Scholar] [CrossRef]
- Bounoua, L.; Safia, A.; Masek, J.; Peter-Lidard, C. Impact of urban growth on surface climate: A case study in Organ, Algeria. J. Appl. Meteorol. Clim. 2008, 48, 217–232. [Google Scholar] [CrossRef]
- Pandey, B.; Seto, K.C. Urbanization and agricultural land loss in India: Comparing satellite estimates with census data. J. Environ. Manag. 2015, 148, 53–66. [Google Scholar] [CrossRef]
- Jiang, L.; Deng, X.; Seto, K.C. The impact of urban expansion on agricultural land use intensity in China. Land Use Policy 2013, 35, 33–39. [Google Scholar] [CrossRef]
- Reddy, V.R.; Reddy, B.S. Land alienation and local communities: Case studies in Hyderabad-Secunderabad. Econ. Political Wkly. 2007, 42, 3233–3240. [Google Scholar]
- Varughese, G.; Lakshmi, K.; Kumar, A.; Rana, N. State of Envioenment Report: India, 2009; India Environment Portal: New Delhi, India, 2009; pp. 123–136. [Google Scholar]
- Veni, L.K.; Alivelu, G. Production and per capita availability of food grains in India-an analysis. IUP J. Agric. Econ. 2005, 2, 18–33. [Google Scholar]
- Brahmanand, P.S.; Kumar, A.; Ghosh, S.; Roy Chowdhury, S.; Singandhupe, R.B.; Singh, R.; Nanda, P.; Chakraborthy, H.; Srivastava, S.K.; Behera, M.S. Challenges of food security in India. Curr. Sci. 2013, 104, 841–846. [Google Scholar]
- Kalamkar, S.S. Urbanisation and agricultural growth in India. Indian J. Agric. Econ. 2009, 64, 442–461. [Google Scholar]
- Tang, J.; Chen, F.; Schwartz, S.S. Assessing spatiotemporal variations of greenness in the Baltimore-Washington corridor area. Landsc. Urban Plan. 2012, 105, 296–306. [Google Scholar] [CrossRef]
- Sharma, R.; Joshi, P.K. Mapping environmental impacts of rapid urbanization in the national capital region of India using remote sensing inputs. Urban Clim. 2016, 15, 70–82. [Google Scholar] [CrossRef]
- Gomarasca, M.; Brivio, P.; Pagnoni, F.; Galli, A. One century of land use change in the metropolitan area of Milan (Italy). Int. J. Remote Sens. 1993, 14, 211–223. [Google Scholar] [CrossRef]
- Lenney, M.; Woodcock, C.; Collins, J.; Hamdi, H. The status of agricultural lands in Egypt: The use of multitemporal NDVI features derived from landsat TM. Remote Sens. Environ. 1996, 56, 8–20. [Google Scholar] [CrossRef]
- Farooq, S.; Ahmad, S. Urban sprawl development around Aligarh city: A study aided by satellite remote sensing and GIS. J. Indian Soc. Remote Sens. 2008, 36, 77–88. [Google Scholar] [CrossRef]
- Sandhya Kiran, G.; Joshi, U.B. Estimation of variable explaining urbanization concomitant with land-use change: A spatial approach. Int. J. Remote Sens. 2013, 34, 824–847. [Google Scholar] [CrossRef]
- Wakode, H.B.; Baier, K.; Jha, R.; Azzam, R. Analysis of urban growth using landsat TM/ETM data and GIS-a case study of Hyderabad, India. Arab. J. Geosci. 2013, 16, 1–13. [Google Scholar] [CrossRef]
- Tang, J. Modeling urban landscape dynamics using subpixel fractions and fuzzy cellular automata. Environ. Plan. B 2011, 38, 903–920. [Google Scholar] [CrossRef]
- Mertens, B.; Lambin, E.F. Land cover change trajectories in Southern Cameroon. Ann. Assoc. Am. Geogr. 2000, 90, 467–494. [Google Scholar] [CrossRef]
- Tang, J.; Wang, L.; Yao, Z. Spatio-temporal urban landscape change analysis using the Markov chain model and a modified genetic algorithm. Int. J. Remote Sens. 2007, 28, 3255–3271. [Google Scholar] [CrossRef]
- Liu, M.; Hu, Y.; Chang, Y.; He, Y.; Zhang, W. Land use and land cover change analysis and prediction in the upper reaches of the Minjiang River, China. Environ. Manag. 2009, 43, 899–907. [Google Scholar] [CrossRef] [PubMed]
- Joshi, N.; Baumann, M.; Ehammer, A.; Fensholt, R.; Grogan, K.; Hostert, P.; Jepsen, M.; Kuemmerle, T.; Meyfroidt, P.; Mitchard, E.; et al. A review of application of optical and radar remote sensing data fusion to land use mapping and monitoring. Remote Sens. 2016, 8, 70. [Google Scholar] [CrossRef]
- Alqurashi, A.F.; Kumar, L.; Sinha, P. Urban land cover change modeling using time-series satellite images: A case study of urban growth in five cities of Saudi Arabia. Remote Sens. 2016, 8, 838. [Google Scholar] [CrossRef]
- Cromley, R.G.; Hanink, D.M. Coupling land-use allocation models with raster GIS. J. Geogr. Syst. 1999, 1, 137–153. [Google Scholar] [CrossRef]
- Herold, M.; Goldstein, N.C.; Clarke, K.C. The spatiotemporal form of urban growth: Measurement, analysis and modeling. Remote Sens. Environ. 2003, 86, 286–302. [Google Scholar] [CrossRef]
- Eastman, R. Guide to GIS and Image Processing; Clark University: Worcester, MA, USA, 1999; pp. 110–125. [Google Scholar]
- Tobler, W.R. Cellular Geography. In Philosophy in Geography; Gale, S., Olsson, G., Eds.; D. Reidel Publishing Company: Dordrecht, The Netherlands, 1979; pp. 179–186. [Google Scholar]
- Veldkamp, A.; Fresco, L.O. CLUE: A conceptual model to study the conversion of land use and its effects. Ecol. Model. 1996, 85, 253–270. [Google Scholar] [CrossRef]
- Adhikari, S.; Southworth, J. Simulating forest cover changes of Bannerghatta National Park based on a CA-Markov model: A remote sensing approach. Remote Sens. 2012, 4, 3215–3243. [Google Scholar] [CrossRef]
- Hegazy, I.R.; Kaloop, M.R. Monitoring urban growth and land use change detection with GIS and remote sensing techniques in Daqahia governorate Egypt. Int. J. Sustain. Built Environ. 2015, 4, 117–124. [Google Scholar] [CrossRef]
- Zheng, H.W.; Shen, G.Q.; Wang, H.; Hong, J. Simulating land use change in urban renewal areas: A case study in Hong Kong. Habitat Int. 2015, 46, 23–34. [Google Scholar] [CrossRef]
- Weng, Q. Land use change analysis in the Zhujiang delta of China using satellite remote sensing, GIS and stochastic modeling. J. Environ. Manag. 2002, 64, 273–284. [Google Scholar] [CrossRef]
- Parker, C.D.; Manson, M.S.; Janssen, A.M.; Hoffmann, J.M.; Deadman, P. Multi-agent systems for the simulation of land-use and land-cover change: A review. Ann. Assoc. Am. Geogr. 2003, 93, 314–337. [Google Scholar] [CrossRef]
- Halmy, M.W.; Gessler, P.E.; Hicke, J.A.; Salem, B.B. Land use/land cover change detection and prediction in the north-western coastal desert of Egypt using Markov-CA. Appl. Geogr. 2015, 63, 101–112. [Google Scholar] [CrossRef]
- Bourne, L.S. Monitoring change and evaluating the impact of planning policy on urban structure: A Markov chain experiment. Plan. Can. 1976, 16, 5–14. [Google Scholar]
- Muller, M.R.; Middleton, J.A. Markov model of land-use change dynamics in the Niagara Region, Ontario, Canada. Landsc. Ecol. 1994, 9, 151–157. [Google Scholar]
- Moghadam, H.S.; Helbich, M. Spatiotemporal urbanization processes in the megacity of Mumbai, India: A Markov chains-cellular automata urban growth model. Appl. Geogr. 2013, 40, 140–149. [Google Scholar] [CrossRef]
- Yang, X.; Zheng, X.; Chen, R. A land use change mode: Integrating landscape pattern indexes and Markov-CA. Ecol. Model. 2014, 283, 1–7. [Google Scholar] [CrossRef]
- Batty, M.; Xie, Y. From cells to cities. Environ. Plan. B 1994, 21, 31–48. [Google Scholar] [CrossRef]
- Aburas, M.M.; Ho, Y.M.; Ramli, M.F.; Ash’aari, Z.H. Improving the capability of an integrated CA-Markov model to simulate spatio-temporal urban growth trends using an analytical hierarchy process and frequency ratio. Int. J. Appl. Earth Obs. 2017, 59, 65–78. [Google Scholar] [CrossRef]
- Clarke, K.C.; Hoppen, S. A self-modifying cellular automata model of historical urbanization in the San Francisco Bay area. Environ. Plan. B 1997, 24, 247–261. [Google Scholar] [CrossRef]
- Wu, F.; Martin, D. Urban expansion simulation of Southeast England using population surface modeling and cellular automata. Environ. Plan. A 2002, 34, 1855–1876. [Google Scholar] [CrossRef]
- Mas, J.; Kolb, M.; Paegelow, M.; Olmedo, M.; Houet, T. Inductive pattern-based land use/cover change models: A comparison of four software packages. Environ. Model. Softw. 2014, 51, 94–111. [Google Scholar] [CrossRef] [Green Version]
- Kamusoko, C.; Aniya, M.; Adi, B.; Manjoro, M. Rural sustainability under threat in Zimbabwe-Simulation of future land use/cover changes in the Bindura district based on the Markov-cellular automata model. Appl. Geogr. 2009, 29, 435–447. [Google Scholar] [CrossRef]
- Ghosh, P.; Mukhopadhyay, A.; Chanda, A.; Mondal, P.; Akhand, A.; Mukherjee, S.; Nayak, S.K.; Ghosh, S.; Mitra, D.; Ghosh, T.; et al. Application of cellular automata and Markov-chain model in geospatial environmental modeling—A review. Remote Sens. Appl. 2017, 5, 64–77. [Google Scholar] [CrossRef]
- Pontius, G.R.; Malanson, J. Comparison of the structure and accuracy of two land change models. Int. J. Geogr. Inf. Syst. 2005, 19, 243–265. [Google Scholar] [CrossRef]
- Eastman, J.R. IDRISI Guide to GIS and Image Processing; Clark University: Worcester, MA, USA, 2009; pp. 182–185. [Google Scholar]
- Theobald, D.M.; Hobbs, N.T. Forecasting rural land-use change: A comparison of regression- and spatial transition-based models. Geogr. Environ. Model. 1998, 2, 65–82. [Google Scholar]
- Tolessa, T.; Senbeta, F.; Kidane, M. The impact of land use/land cover change on ecosystem services in the central highlands of Ethiopia. Ecosyst. Serv. 2017, 23, 47–54. [Google Scholar] [CrossRef]
- Liyama, N.; Kamada, M.; Nakagoshi, N. Ecological and social evaluation of landscape in a rural area with terraced paddies in southwestern Japan. Landsc. Urban Plan. 2005, 73, 60–71. [Google Scholar]
- Lee, C.; Huang, S.; Chan, S. Biophysical and system approaches for simulating land-use change. Landsc. Urban Plan. 2008, 86, 187–203. [Google Scholar] [CrossRef]
- Jain, M.; Dawa, D.; Mehta, R.; Dimri, A.P.; Pandit, M.K. Monitoring land use change and its drivers in Delhi, India using multi-temporal satellite data. Model. Earth Syst. Environ. 2016, 2, 1–14. [Google Scholar]
- Rahman, A.; Kumar, S.; Fazal, S.; Siddiqui, M.A. Assessment of land use/land cover change in the north-west district of Delhi using remote sensing and GIS techniques. J. Indian Soc. Remote Sens. 2012, 40, 689–697. [Google Scholar] [CrossRef]
- Vogelmann, J.E.; Helder, D.; Morfit, R.; Choate, M.J.; Merchant, J.W.; Bulley, H. Effects of Landsat 5 Thematic Mapper and Landsat 7 Enhanced Thematic Mapper Plus radiometric and geometric calibrations and corrections on landscape characterization. Remote Sens. Environ. 2001, 78, 55–70. [Google Scholar] [CrossRef] [Green Version]
- Fu, P.; Weng, Q. A time series analysis of urbanization induced land use and land cover change and its impact on land surface temperature with Landsat imagery. Remote Sens. Environ. 2016, 175, 205–214. [Google Scholar] [CrossRef]
- Datta, K.K.; Jong, C.D. Adverse effect of waterlogging and soil salinity on crop and land productivity in northwest region of Haryana, India. Agric. Water Manag. 2002, 57, 223–238. [Google Scholar] [CrossRef]
- Census of India. Available online: http://www.censusindia.gov.in/ (accessed on 20 May 2018).
- Alexander, P.; Rounsevell, M.D.A.; Dslich, C.; Dodson, J.R.; Engstrom, K.; Moran, D. Drivers of global agricultural land use change: The nexus of diet, population, yield, and bioenergy. Glob. Environ. Chang. 2015, 35, 138–147. [Google Scholar] [CrossRef]
- Fortin, M.J.; Boots, B.; Csillag, F.; Remmel, T.K. On the role of spatial stochastic models in understanding landscape indices in ecology. Oikos 2003, 102, 203–212. [Google Scholar] [CrossRef]
- Pattern, T.A.; Thomas, L.; Wilcox, C.; Ovaskainen, O.; Matthiopoulos, J. State-space models of individual animal movement. Trends Ecol. Evol. 2008, 23, 87–94. [Google Scholar] [CrossRef]
- Bichi, M.; Ripaccioli, G.; Cairano, S.D.; Bernardini, D.; Bemporad, A.; Kolmanovsky, I.V. Stochastic model predictive control with driver behavior leaning for improved powertrain control. In Proceedings of the 49th IEEE Conference on Decision and Control, Atlanta, GA, USA, 15–17 December 2010. [Google Scholar]
- Brown, D.G.; Pijanowski, B.C.; Duh, J.D. Modeling the relationships between land use and land cover on private lands in the Upper Midwest, USA. J. Environ. Manag. 2000, 59, 247–263. [Google Scholar] [CrossRef] [Green Version]
- White, R.; Engelen, G. Ceullular automata as the basis of integrated dynamics regional modeling. Environ. Plan. B 1997, 24, 235–246. [Google Scholar] [CrossRef]
- He, C.; Okada, N.; Zhang, Q.; Shi, P.; Li, J. Modeling dynamic urban expansion processes incorporating a potential model with cellular automata. Landsc. Urban Plan. 2008, 86, 79–91. [Google Scholar] [CrossRef]
- Shan, J.; Alkheder, S.; Wang, J. Genetic algorithm for the calibration of cellular automata urban growth modeling. Photogramm. Eng. Remote Sens. 2008, 74, 1267–1277. [Google Scholar] [CrossRef]
- Al-Ahmadi, K.; See, L.; Heppenstall, A.; Hogg, J. Calibration of a fuzzy cellular automata model or urban dynamics in Saudi Arabia. Ecol. Complex. 2009, 6, 80–101. [Google Scholar] [CrossRef]
- Clarke, K.C.; Gaydos, L.J. Loose-coupling a cellular automata model and GIS: Long-term urban growth prediction for San Francisco and Washington/Baltimore. Int. J. Geogr. Inf. Sci. 1998, 12, 699–714. [Google Scholar] [CrossRef] [PubMed]
- Misra, A.K. A river about to die: Yamuna. J. Water Res. Prot. 2010, 2, 489–500. [Google Scholar] [CrossRef]
- Ramachandra, T.V.; Bharath, A.H.; Sowmyashree, M.V. Monitoring urbanization and its implications in a mega city from space: Spatiotemporal patterns and its indicators. J. Environ. Manag. 2015, 148, 67–81. [Google Scholar] [CrossRef]
- Adhikari, S.; Southworth, J.; Nagendra, H. Understanding forest loss and recovery: A spatiotemporal analysis of land change in and around Bannerghatta National Park, India. J. Land Use Sci. 2014, 10, 402–424. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Path/Row | Acquisition Date (Year Month Day) | Sensor and Data Characteristics | Data Utility |
|---|---|---|---|
| 146/40 | 1994 09 30 | TM, 7 spectral bands, 30 m spatial resolution | Model development |
| 2003 03 07 | ETM, 8 spectral bands, 30 m spatial resolution | ||
| 2014 09 21 | OLI, 11 spectral bands, 15 m spatial resolution | ||
| 1998 09 09 | TM, 7 spectral bands, 30 m spatial resolution | Model calibration | |
| 2009 02 27 | TM, 7 spectral bands, 30 m spatial resolution | ||
| 2017 09 29 | OLI, 11 spectral bands, 15 m spatial resolution | Model validation | |
| 147/40 | 1994 09 21 | TM, 7 spectral bands, 30 m spatial resolution | Model development |
| 2003 02 26 | ETM, 8 spectral bands, 30 m spatial resolution | ||
| 2014 09 28 | OLI, 11 spectral bands, 15 m spatial resolution | ||
| 1998 08 31 | TM, 7 spectral bands, 30 m spatial resolution | Model calibration | |
| 2009 03 06 | TM, 7 spectral bands, 30 m spatial resolution | ||
| 2017 10 06 | OLI, 11 spectral bands, 15 m spatial resolution | Model validation |
| Producer Accuracy (%) | User Accuracy (%) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 94 | 98 | 03 | 09 | 14 | 17 | 94 | 98 | 03 | 09 | 14 | 17 | |
| Urban | 93.59 | 92.33 | 97.16 | 96.25 | 94.22 | 95.53 | 88.14 | 92.95 | 98.40 | 98.43 | 98.40 | 98.69 |
| Farmland | 84.51 | 63.17 | 70.89 | 71.68 | 86.30 | 86.01 | 89.66 | 75.27 | 68.44 | 71.62 | 84.82 | 86.80 |
| Forest | 96.39 | 92.69 | 96.86 | 98.27 | 93.56 | 97.33 | 84.10 | 73.57 | 91.95 | 91.92 | 93.41 | 87.62 |
| Grassland | 94.62 | 97.85 | 96.77 | 98.92 | 96.77 | 94.62 | 31.77 | 41.82 | 85.71 | 76.03 | 55.56 | 42.31 |
| Wetland | 99.10 | 100.00 | 98.01 | 99.99 | 100.00 | 98.39 | 96.88 | 85.92 | 47.62 | 54.55 | 89.58 | 80.26 |
| Water | 99.61 | 98.56 | 99.18 | 98.95 | 98.22 | 99.45 | 99.99 | 92.49 | 99.51 | 98.60 | 99.28 | 99.45 |
| Bare land | 99.01 | 100.00 | 100.00 | 99.99 | 99.25 | 100.00 | 99.99 | 89.09 | 86.27 | 98.99 | 100.00 | 97.78 |
| Overall accuracy (%): 87.57(1994); 76.80 (1998); 80.27(2003); 81.70(2009); 89.97(2014); 89.61(2017) | ||||||||||||
| Kappa: 0.84 (1994); 0.71(1998); 0.75 (2003); 0.77(2009); 0.87 (2014); 0.87(2017) | ||||||||||||
| Area (Km2) | 2003 | |||||||
|---|---|---|---|---|---|---|---|---|
| Urban | Forest | Farmland | Grassland | Water | Wetland | Bare Land | ||
| 1994 | Urban | 460.36 | 0.39 | 0.19 | 0.31 | 0.05 | 0.03 | 0.02 |
| Forest | 1.65 | 124.87 | 85.13 | 18.90 | 0.80 | 2.15 | 0.43 | |
| Farmland | 322.35 | 200.77 | 8005.18 | 115.69 | 19.27 | 65.00 | 17.30 | |
| Grassland | 13.15 | 35.54 | 160.38 | 226.10 | 0.60 | 4.42 | 0.52 | |
| Water | 1.05 | 7.69 | 22.76 | 2.70 | 70.52 | 2.25 | 4.03 | |
| Wetland | 1.15 | 2.10 | 2.33 | 0.61 | 0.44 | 17.25 | 0.33 | |
| Bare land | 1.04 | 0.35 | 3.11 | 0.43 | 1.87 | 1.04 | 10.90 | |
| Percentage (%) | Urban | Forest | Farmland | Grassland | Water | Wetland | Bare Land | |
| 1994 | Urban | 99.79 | 0.08 | 0.04 | 0.07 | 0.01 | 0.01 | 0.01 |
| Forest | 0.71 | 53.38 | 36.39 | 8.08 | 0.34 | 0.92 | 0.18 | |
| Farmland | 3.69 | 2.30 | 91.53 | 1.32 | 0.22 | 0.74 | 0.20 | |
| Grassland | 2.98 | 8.06 | 36.39 | 51.30 | 0.14 | 1.00 | 0.12 | |
| Water | 0.95 | 6.93 | 20.50 | 2.43 | 63.53 | 2.03 | 3.63 | |
| Wetland | 4.74 | 8.67 | 9.61 | 2.54 | 1.83 | 71.24 | 1.37 | |
| Bare land | 5.52 | 1.84 | 16.61 | 2.31 | 9.96 | 5.57 | 58.15 | |
| Area (Km2) | 2014 | |||||||
|---|---|---|---|---|---|---|---|---|
| Urban | Forest | Farmland | Grassland | Water | Wetland | Bare Land | ||
| 2003 | Urban | 800.75 | 0.47 | 0.10 | 0.22 | 0.03 | 0.21 | 0.01 |
| Forest | 39.47 | 149.63 | 122.25 | 14.79 | 3.44 | 1.48 | 0.51 | |
| Farmland | 391.12 | 236.98 | 7616.72 | 94.68 | 14.75 | 28.25 | 6.60 | |
| Grassland | 18.36 | 100.54 | 109.52 | 133.73 | 0.58 | 1.40 | 0.31 | |
| Water | 1.89 | 1.25 | 18.47 | 0.82 | 20.21 | 0.86 | 2.26 | |
| Wetland | 17.17 | 12.05 | 1.60 | 1.49 | 0.89 | 43.60 | 0.39 | |
| Bare land | 4.80 | 0.48 | 3.09 | 0.31 | 2.58 | 1.01 | 13.46 | |
| Percentage (%) | Urban | Forest | Farmland | Grassland | Water | Wetland | Bare Land | |
| 2003 | Urban | 99.87 | 0.06 | 0.01 | 0.03 | 0.00 | 0.03 | 0.00 |
| Forest | 11.90 | 45.13 | 36.87 | 4.46 | 1.04 | 0.45 | 0.15 | |
| Farmland | 4.66 | 2.82 | 90.79 | 1.13 | 0.18 | 0.34 | 0.08 | |
| Grassland | 5.04 | 27.59 | 30.05 | 36.70 | 0.16 | 0.38 | 0.08 | |
| Water | 4.13 | 2.73 | 40.37 | 1.79 | 44.18 | 1.87 | 4.94 | |
| Wetland | 22.25 | 15.62 | 2.07 | 1.94 | 1.15 | 56.48 | 0.50 | |
| Bare land | 18.65 | 1.85 | 12.02 | 1.20 | 10.03 | 3.92 | 52.33 | |
| Percentage (%) | 2014 | |||||||
|---|---|---|---|---|---|---|---|---|
| Urban | Forest | Farmland | Grassland | Water | Wetland | Bare Land | ||
| 1994 | Urban | 99.98 | 0.01 | 0.00 | 0.00 | 0.00 | 0.00 | 0.02 |
| Forest | 0.58 | 94.92 | 3.70 | 0.65 | 0.07 | 0.07 | 0.02 | |
| Farmland | 0.42 | 0.26 | 99.11 | 0.12 | 0.02 | 0.06 | 0.01 | |
| Grassland | 0.39 | 1.70 | 3.39 | 94.42 | 0.01 | 0.07 | 0.01 | |
| Water | 0.24 | 0.51 | 2.97 | 0.22 | 95.44 | 0.20 | 0.43 | |
| Wetland | 1.27 | 1.19 | 0.63 | 0.23 | 0.15 | 96.42 | 0.10 | |
| Bare land | 1.15 | 0.19 | 1.47 | 0.18 | 1.01 | 0.49 | 95.51 | |
| Area (km2) | Urban | Forest | Farmland | Grassland | Wetland | Water | Bare Land | |
|---|---|---|---|---|---|---|---|---|
| 1998 | Empirical | 762.48 | 341.51 | 8845.64 | 263.70 | 141.36 | 33.35 | 5.01 |
| “Only” model | 774.53 | 204.00 | 8600.47 | 341.02 | 153.67 | 3.37 | 10.19 | |
| “Full” model | 747.50 | 204.26 | 8727.37 | 340.34 | 154.38 | 3.27 | 10.13 | |
| RMSE: 0.61 (“only” model); 0.60 (“full” model) | ||||||||
| 2009 | Empirical | 1275.10 | 730.46 | 7981.21 | 209.03 | 39.26 | 32.23 | 26.02 |
| “Only” model | 1144.36 | 384.88 | 8161.04 | 326.55 | 158.57 | 2.52 | 9.33 | |
| “Full” model | 1163.62 | 387.40 | 8139.50 | 328.71 | 155.76 | 2.70 | 9.55 | |
| RMSE: 1.96 (“only” model); 1.89 (“full” model) | ||||||||
| Empirical Map (km2) | Predicted Map (km2) | User’s Accuracy (%) | Producer’s Accuracy (%) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Urban | Forest | Farmland | Grassland | Water | Wetland | Bareland | |||
| Urban | 1174.78 | 5.35 | 393.19 | 12.51 | 0.41 | 0.08 | 0.42 | 82.60 | 74.04 |
| Forest | 62.30 | 62.43 | 326.41 | 125.74 | 0.61 | 0.31 | 0.15 | 34.93 | 10.80 |
| Farmland | 172.60 | 102.12 | 7031.78 | 75.32 | 5.33 | 1.66 | 7.52 | 89.08 | 95.07 |
| Grassland | 10.63 | 7.78 | 104.64 | 101.50 | 0.29 | 0.14 | 0.11 | 32.01 | 45.09 |
| Wetland | 0.22 | 0.26 | 10.71 | 0.16 | 1.33 | 0.02 | 0.45 | 15.67 | 10.10 |
| Water | 1.46 | 0.72 | 22.36 | 1.63 | 0.20 | 0.06 | 0.38 | 2.71 | 1.43 |
| Bareland | 0.33 | 0.06 | 4.54 | 0.19 | 0.31 | 0.06 | 0.23 | 1.67 | 3.96 |
| Overall accuracy: 0.75; Kappa: 0.59; RMSE: 6.74 | |||||||||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, J.; Di, L. Past and Future Trajectories of Farmland Loss Due to Rapid Urbanization Using Landsat Imagery and the Markov-CA Model: A Case Study of Delhi, India. Remote Sens. 2019, 11, 180. https://doi.org/10.3390/rs11020180
Tang J, Di L. Past and Future Trajectories of Farmland Loss Due to Rapid Urbanization Using Landsat Imagery and the Markov-CA Model: A Case Study of Delhi, India. Remote Sensing. 2019; 11(2):180. https://doi.org/10.3390/rs11020180
Chicago/Turabian StyleTang, Junmei, and Liping Di. 2019. "Past and Future Trajectories of Farmland Loss Due to Rapid Urbanization Using Landsat Imagery and the Markov-CA Model: A Case Study of Delhi, India" Remote Sensing 11, no. 2: 180. https://doi.org/10.3390/rs11020180
APA StyleTang, J., & Di, L. (2019). Past and Future Trajectories of Farmland Loss Due to Rapid Urbanization Using Landsat Imagery and the Markov-CA Model: A Case Study of Delhi, India. Remote Sensing, 11(2), 180. https://doi.org/10.3390/rs11020180