Monitoring Harvesting by Time Series of Sentinel-1 SAR Data


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
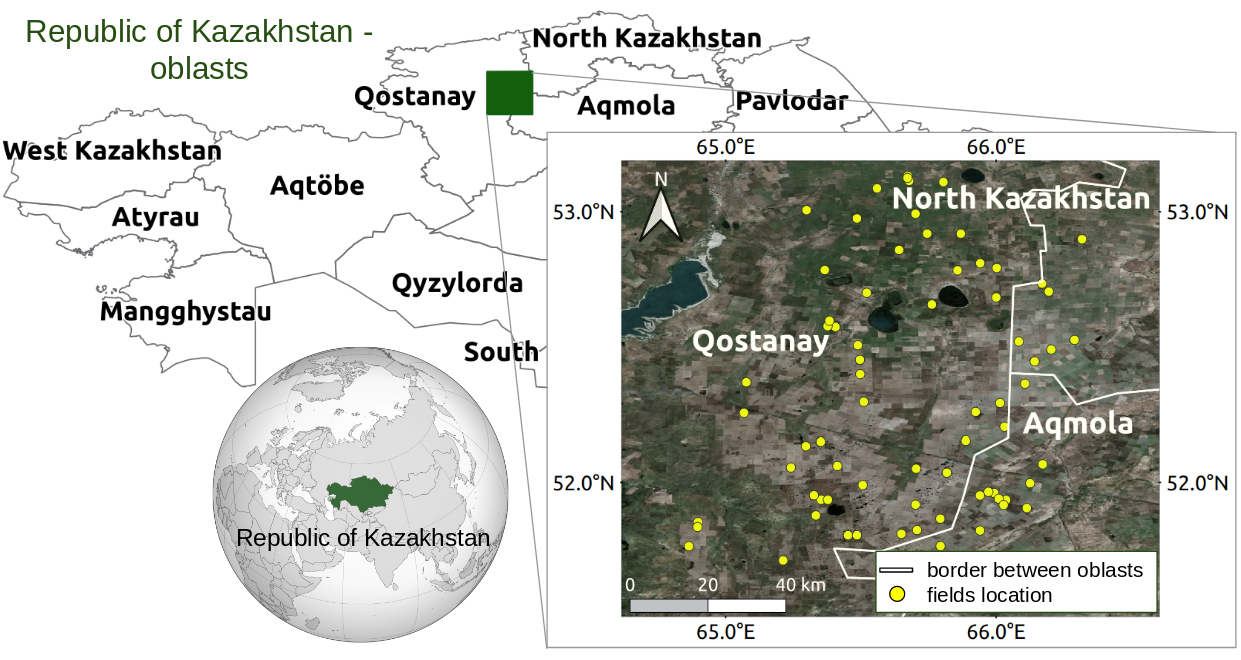
2.1. Study Area
2.2. Harvesting Dates
2.3. Satellite Data
2.4. Processing
2.5. Control Points
2.6. Monitoring Period
2.7. Accuracy Assessment
3. Proposed Algorithm
- Registration of harvesting completion dates by changes in coherence;
- Filtering of false triggering by the threshold values of .
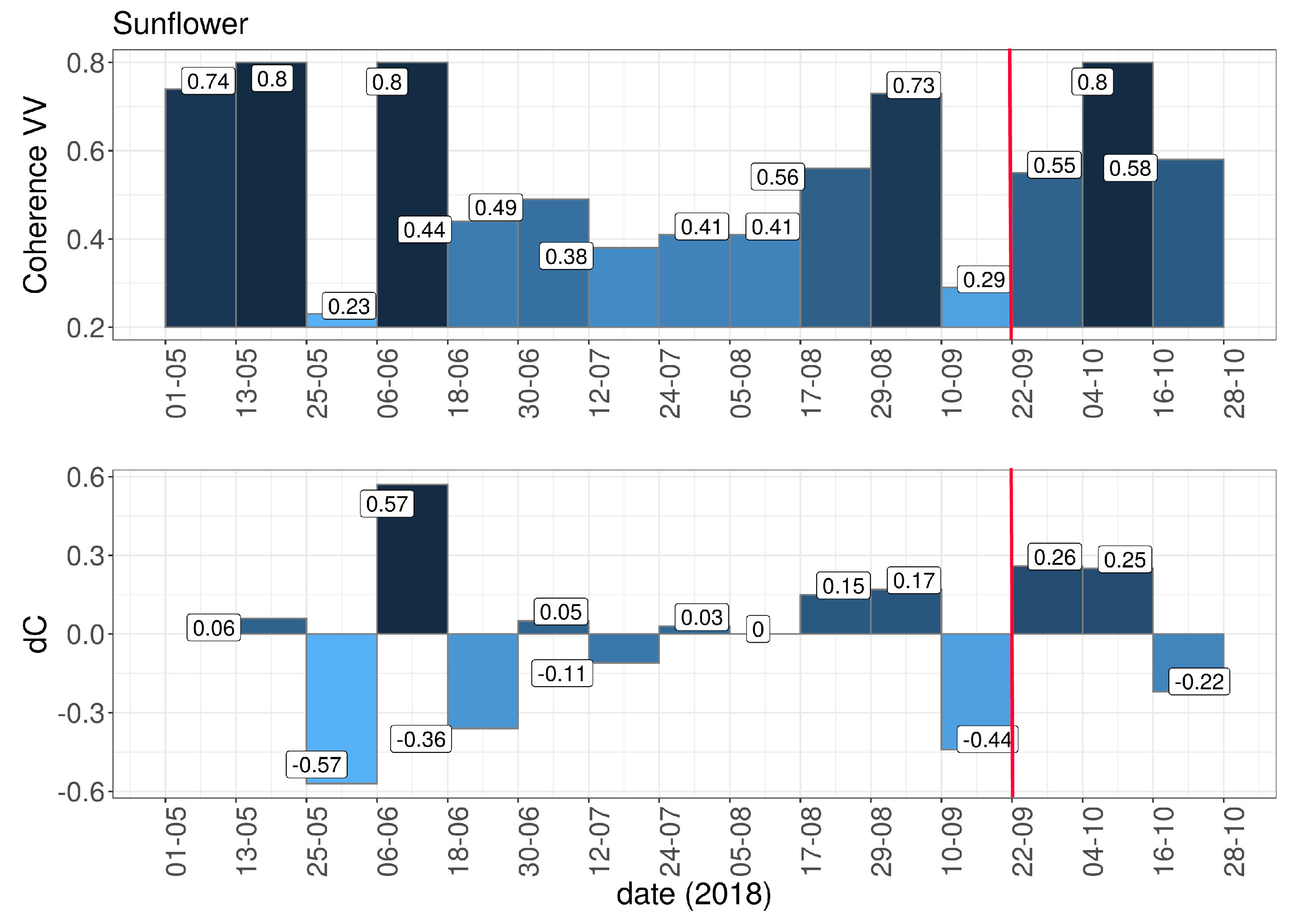
- Coherence is gradually increasing as the plants are ripening and drying out (Figure 6, 5 August–10 September 2018). Then, coherence drops, typically, during the period of harvesting (Figure 6, 10–22 September 2018). After that, coherence is growing again (Figure 6, 22 September–4 October 2018). In particular, such behavior is observed in row crops.
4. Results and Discussion
- in August—572 fields.
- in September—1010 fields.
- in October—66 fields.
- is low at least in one of the first sensing dates (sometimes in two or three dates). This allows the ability to determine the beginning of sowing period and presowing treatment.
- The last of the low values at the beginning of the growing season corresponds to sowing. After sowing increases abruptly.
- The maximum values during the growing season are from to dB.
- High values (>0.4) are possible during the growing season, and cannot be explained by incidence angle effect (the incidence angle would affect the average coherence during the entire season). Such fields contain sparse vegetation and/or row crops with wide planting distances.
- As a rule, no more than one alternation of low-high with a small amplitude is observed for grain crops during plant growth. The decrease in down to 0.3 disrupting a smooth U-trend during the growing season is caused by soil cultivation. Coherence never decreases to an open soil level of 0.25.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ESA | European Space Agency |
| GIS | Geoinformation system |
| GPM | Global Precipitation Measurement |
| GPS | Global Positioning System |
| GPT | Graph Processing Tool |
| IMERG | Integrated Multi-satellitE Retrievals for GPM |
| IW | Interferometric Wide |
| LAI | Leaf area index |
| MAE | Mean absolute error |
| MODIS | Moderate Resolution Imaging Spectroradiometer |
| NDVI | Normalized Difference Vegetation Index |
| RMSE | Root Mean Square Error |
| SLC | Single Look Complex |
| SNAP | Sentinel Application Platform |
| UAV | Unmanned aerial vehicle |
| VH | Vertical transmit and horizontal receive |
| VV | Vertical transmit and vertical receive |
| VWC | Vegetation water content |
References
- Xiang, M.; Wei, S.; Zhang, M.; Li, M. Real-time Monitoring System of Agricultural Machinery Operation Information Based on ARM11 and GNSS. IFAC-PapersOnLine 2016, 49, 121–126. [Google Scholar] [CrossRef]
- Kunal, S.; Singh, S.; Rana, R.S.; Rana, A.; Vaibhav, K.; Kaushal, A. Application of GIS in Precision Agriculture. 2015. Available online: https://www.researchgate.net/profile/Kunal_Sood4/publication/295858552_Application_of_GIS_in_precision_agriculture/links/573eedd408ae298602e8e432.pdf (accessed on 24 October 2019).
- Muratova, N.; Terekhov, A. Tekhnologiya uborki zernovykh kul’tur Kazakhstana v predstavlenii sputnikovykh dannykh. Sovremennye Problemy Distantsionnogo Zondirovaniya Zemli iz Kosmosa 2007, 4, 269–276. [Google Scholar]
- Sakamoto, T.; Yokozawa, M.; Toritani, H.; Shibayama, M.; Ishitsuka, N.; Ohno, H. A crop phenology detection method using time-series MODIS data. Remote Sens. Environ. 2005. [Google Scholar] [CrossRef]
- You, X.; Meng, J.; Zhang, M.; Dong, T. Remote Sensing Based Detection of Crop Phenology for Agricultural Zones in China Using a New Threshold Method. Remote Sens. 2013, 5, 3190–3211. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.; Wu, B.; Zhang, M.; Zeng, H. Crop Phenology Detection Using High Spatio-Temporal Resolution Data Fused from SPOT5 and MODIS Products. Sensors 2016, 16, 2099. [Google Scholar] [CrossRef] [PubMed]
- Lin, C.H.; Liu, Q.S.; Huang, C.; Liu, G.H. Monitoring of winter wheat distribution and phenological phases based on MODIS time-series: A case study in the Yellow River Delta, China. J. Integr. Agric. 2016. [Google Scholar] [CrossRef]
- Riedel, T.; Eckardt, R. Agricultural Applications with SAR Data. Module 3202: Biosphere. Available online: https://saredu.dlr.de/unit/agriculture (accessed on 24 October 2019).
- Lusch, D. Introduction To Microwave Remote Sensing; Center For Remote Sensing and Geographic Information Science Michigan State University: East Lansing, MI, USA, 1999; p. 84. [Google Scholar]
- Ferrazzoli, P. SAR for Agriculture: Advances, Problems and Prospects. In Proceedings of the 3rd International Symposium on Retrieval of Bio- and Geophysical Parameters from SAR Data for Land Applications, Sheffield, UK, 11–14 September 2001. [Google Scholar]
- Brisco, B.; Brown, R. Agricultural Applications with Radar. In Principles & Applications of Imaging Radar. Manual of Remote Sensing, 3rd ed.; Henderson, F., Lewis, A., Eds.; Wiley & Sons: New York, NY, USA, 1998. [Google Scholar]
- Ballester-Berman, J.D.; Lopez-Sanchez, J.M.; Fortuny-Guasch, J. Retrieval of biophysical parameters of agricultural crops using polarimetric SAR interferometry. IEEE Trans. Geosci. Remote. Sens. 2005. [Google Scholar] [CrossRef]
- Attema, E.P.W.; Ulaby, F.T. Vegetation modeled as a water cloud. Radio Sci. 1978, 13, 357–364. [Google Scholar] [CrossRef]
- Vreugdenhil, M.; Wagner, W.; Bauer-Marschallinger, B.; Pfeil, I.; Teubner, I.; Rüdiger, C.; Strauss, P. Sensitivity of Sentinel-1 backscatter to vegetation dynamics: An Austrian case study. Remote Sens. 2018, 10, 1396. [Google Scholar] [CrossRef]
- Harfenmeister, K.; Spengler, D.; Weltzien, C. Analyzing temporal and spatial characteristics of crop parameters using Sentinel-1 backscatter data. Remote Sens. 2019, 11, 1569. [Google Scholar] [CrossRef]
- Taravat, A.; Wagner, M.; Oppelt, N. Automatic Grassland Cutting Status Detection in the Context of Spatiotemporal Sentinel-1 Imagery Analysis and Artificial Neural Networks. Remote Sens. 2019, 11, 711. [Google Scholar] [CrossRef]
- Wegmüller, U.; Werner, C. Retrieval of vegetation parameters with SAR interferometry. IEEE Trans. Geosci. Remote Sens. 1997. [Google Scholar] [CrossRef]
- Engdahl, M. Multitemporal InSAR in Land-Cover and Vegetation Mapping. Ph.D. Thesis, Aalto University, Espoo, Finland, 2013. [Google Scholar] [CrossRef]
- Blaes, X.; Defourny, P. Retrieving crop parameters based on tandem ERS 1/2 interferometric coherence images. Remote. Sens. Environ. 2003. [Google Scholar] [CrossRef]
- Tamm, T.; Zalite, K.; Voormansik, K.; Talgre, L. Relating Sentinel-1 Interferometric Coherence to Mowing Events on Grasslands. Remote Sens. 2016, 8, 802. [Google Scholar] [CrossRef]
- Snapir, B.; Waine, T.W.; Corstanje, R.; Redfern, S.; Silva, J.D.; Kirui, C. Harvest Monitoring of Kenyan Tea Plantations With X-Band SAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2018, 11, 930–938. [Google Scholar] [CrossRef]
- Kavats, A.; Khramov, D.; Sergieieva, K.; Vasyliev, V.; Kavats, Y. Geoinformation technology of agricultural monitoring using multi-temporal satellite imagery. In Proceedings of the ICAG 2018: 20th International Conference on Agriculture and Geoinformatics, Menlo Park, CA, USA, 14–15 June 2018. [Google Scholar]
- Khabbazan, S.; Vermunt, P.; Steele-Dunne, S.; Ratering Arntz, L.; Marinetti, C.; van der Valk, D.; Iannini, L.; Molijn, R.; Westerdijk, K.; van der Sande, C. Crop Monitoring Using Sentinel-1 Data: A Case Study from The Netherlands. Remote Sens. 2019, 11, 1887. [Google Scholar] [CrossRef]
- Wheat Exports by Country. Available online: http://www.worldstopexports.com/wheat-exports-country/ (accessed on 24 October 2019).
- Statistics of Agriculture, Forestry, Hunting and Fisheries. Main Indicators. Available online: http://stat.gov.kz/official/industry/14/statistic/7 (accessed on 24 October 2019).
- Country Brief on Kazakhstan. Available online: http://www.fao.org/giews/countrybrief/country.jsp?code=KAZ (accessed on 24 October 2019).
- Land Viewer | EOS—EOS Data Analytics. Available online: https://eos.com/landviewer/ (accessed on 24 October 2019).
- Copernicus Open Access Hub. Available online: https://scihub.copernicus.eu/dhus/#/home (accessed on 24 October 2019).
- MOD09Q1—MODIS/Terra Surface Reflectance 8-Day L3 Global 250m SIN Grid. Available online: https://ladsweb.modaps.eosdis.nasa.gov/missions-and-measurements/products/land-surface-reflectance/MOD09Q1/ (accessed on 24 October 2019).
- Huffman, G.; Bolvin, D.; Nelkin, E. Integrated Multi-SatellitE Retrievals for GPM (IMERG); Version 5B; NASA’s Precipitation Processing Center: Washington, DC, USA, 2018. [Google Scholar]
- Sentinel Application Platform (SNAP). Available online: https://step.esa.int/main/toolboxes/snap/ (accessed on 24 October 2019).
- Busetto, L.; Ranghetti, L. MODIStsp: An R package for automatic preprocessing of MODIS Land Products time series. Comput. Geosci. 2016, 97, 40–48. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2019; Available online: https://www.R-project.org/ (accessed on 24 October 2019).
- Pebesma, E.; Bivand, R.S. Classes and Methods for Spatial Data: The sp Package. 2005. Available online: https://cran.r-project.org/web/packages/sp/vignettes/intro_sp.pdf (accessed on 24 October 2019).
- Spaar, D. Zernovyye kul’tury (Vyrashchivaniye, Uborka, Dorabotka i ispol’zovaniye); ID OOO “DLV Agrodelo”: Moscow, Russia, 2008. [Google Scholar]
- Ferrazzoli, P.; Paloscia, S.; Pampaloni, P.; Schiavon, G.; Solimini, D.; Coppo, P. Sensitivity to microwave measurements to vegetation biomass and soil moisture content: A case study. IEEE Trans. Geosci. Remote Sens. 1992, 30, 750–756. [Google Scholar] [CrossRef]
- Macelloni, G.; Paloscia, S.; Pampaloni, P.; Marliani, F.; Gai, M. The relationship between the backscattering coefficient and the biomass of narrow and broad leaf crops. IEEE Trans. Geosci. Remote Sens. 2001, 39, 873–884. [Google Scholar] [CrossRef]
- Sentinel-1 Observation Scenario. Available online: https://sentinel.esa.int/web/sentinel/missions/sentinel-1/observation-scenario (accessed on 24 October 2019).
- Hobbs, S.; Ang, W.; Seynat, C. Wind and Rain Effects on SAR Backscatter from Crops. In Proceedings of the 2nd International Workshop on Retrieval of Bio- and Geophysical Parameters from SAR Data for Land Applications, ETEC, Noordwijk, The Netherlands, 21–23 October 1998. [Google Scholar]










© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kavats, O.; Khramov, D.; Sergieieva, K.; Vasyliev, V. Monitoring Harvesting by Time Series of Sentinel-1 SAR Data. Remote Sens. 2019, 11, 2496. https://doi.org/10.3390/rs11212496
Kavats O, Khramov D, Sergieieva K, Vasyliev V. Monitoring Harvesting by Time Series of Sentinel-1 SAR Data. Remote Sensing. 2019; 11(21):2496. https://doi.org/10.3390/rs11212496
Chicago/Turabian StyleKavats, Olena, Dmitriy Khramov, Kateryna Sergieieva, and Volodymyr Vasyliev. 2019. "Monitoring Harvesting by Time Series of Sentinel-1 SAR Data" Remote Sensing 11, no. 21: 2496. https://doi.org/10.3390/rs11212496
APA StyleKavats, O., Khramov, D., Sergieieva, K., & Vasyliev, V. (2019). Monitoring Harvesting by Time Series of Sentinel-1 SAR Data. Remote Sensing, 11(21), 2496. https://doi.org/10.3390/rs11212496