ASTER Cloud Coverage Assessment and Mission Operations Analysis Using Terra/MODIS Cloud Mask Products


Abstract
:
1. Introduction
2. Materials and Methods
2.1. ASTER Cloud Coverage Reassessment Using MOD35 Products
2.1.1. Overview of MOD35 Products
2.1.2. ASTER Cloud Coverage Reassessment System
- Obtain daily ASTER catalogue information from Japan Space Systems (JSS);
- Obtain MOD35 products from NASA Goddard Space Flight Center (GSFC);
- Generate cloud mask images for all ASTER scenes in the catalogue;
- Send the reassessment results (CC etc.) to JSS, Land Processes Distributed Active Archive Center (LP DAAC), and Institute of Advanced Industrial Science and Technology (AIST);
- Release ASTER cloud mask images to public through Internet [13].
2.2. Evaluation of MOD35-Based ASTER Cloud Masks
2.2.1. Comparison of ASTER Cloud Coverage Among MOD35 Versions
2.2.2. Rate of High-Uncertain Scenes
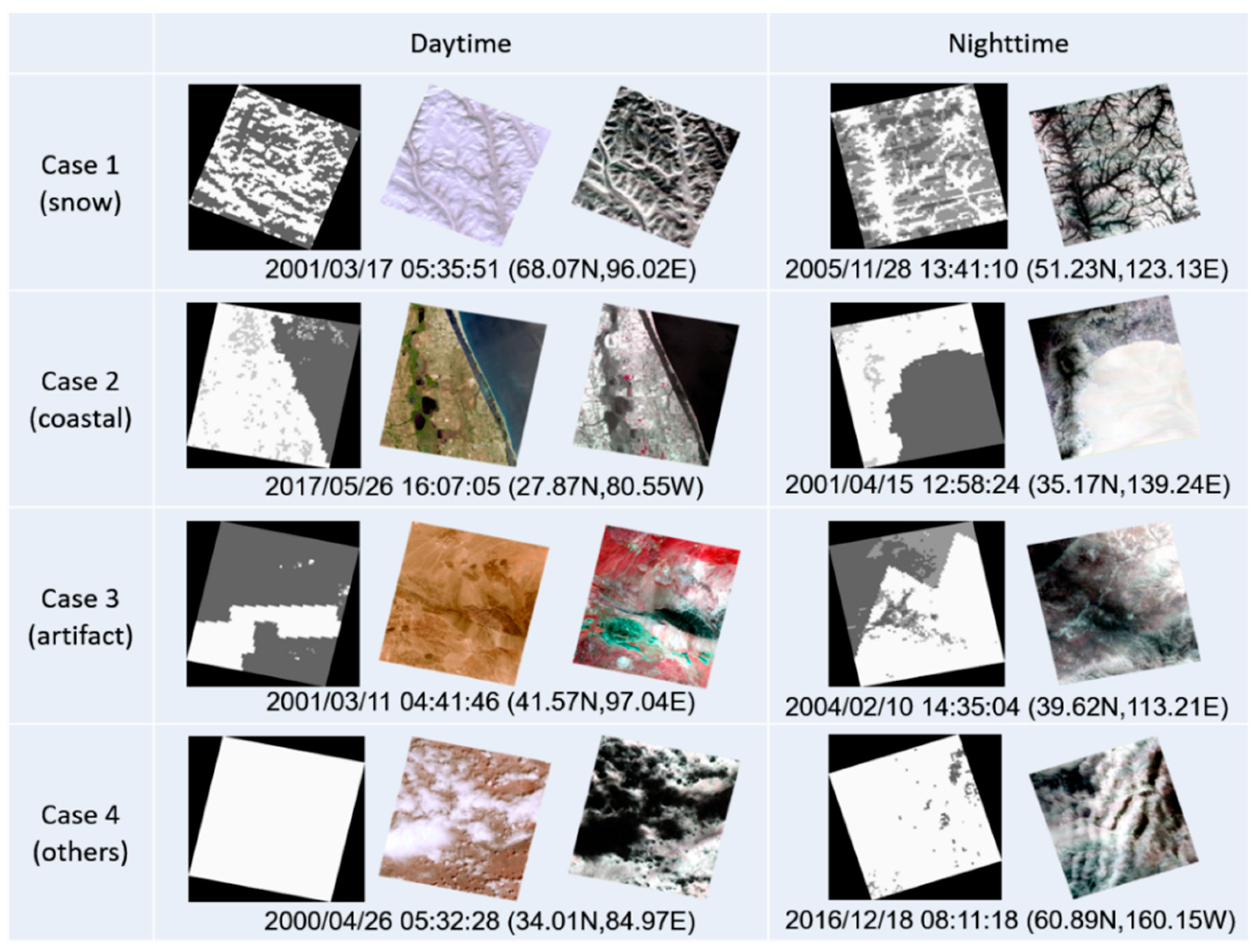
2.2.3. Visual Evaluation of ASTER Cloud Mask Images Using Browse Images
2.3. ASTER Mission Operations Analysis Using MOD35-Based ASTER Cloud Masks
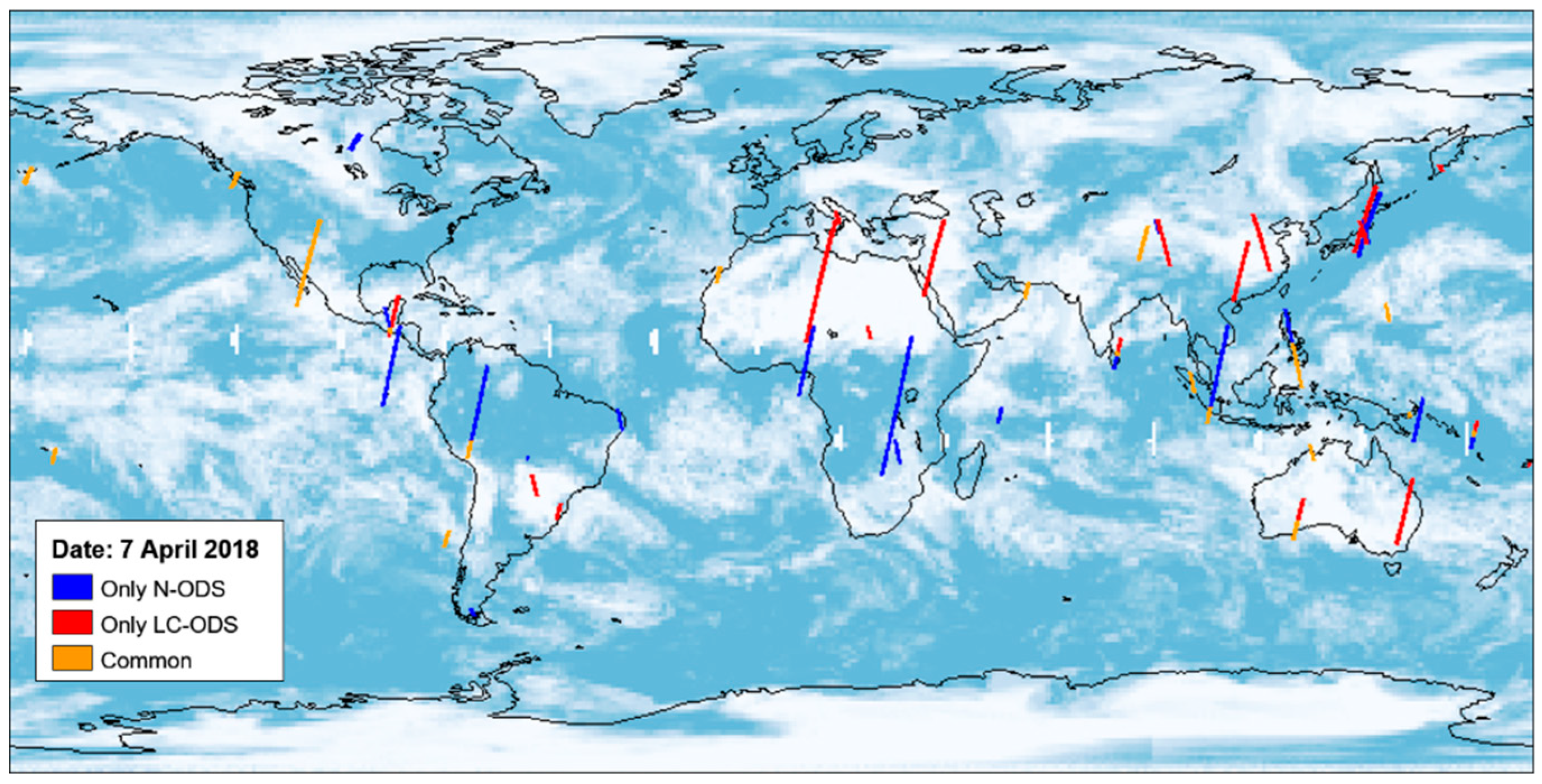
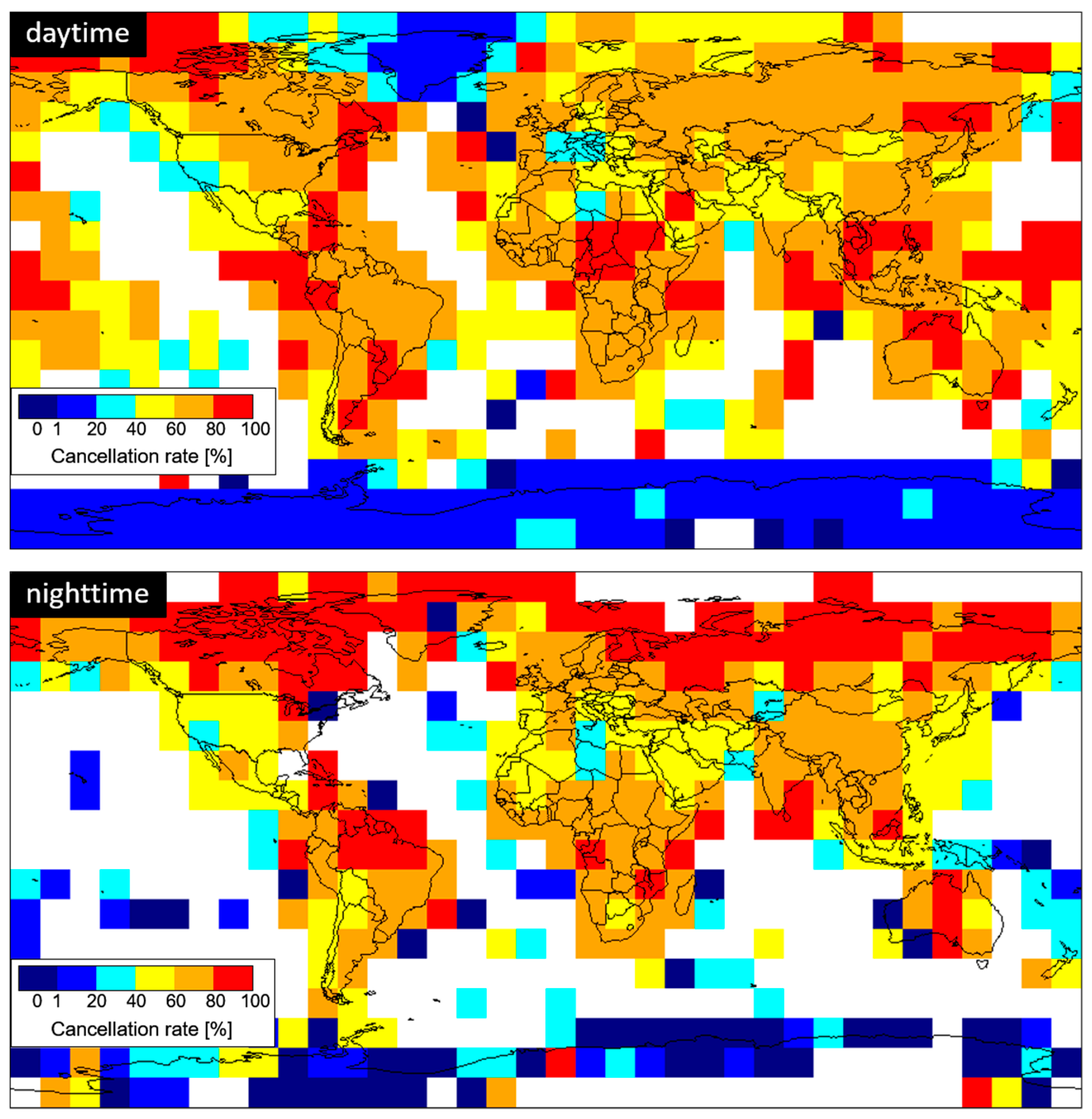
2.3.1. Validation of the Cloud Avoidance Function in the ASTER Observation Scheduler
2.3.2. Time-Series Analysis of the Mean Cloud Coverage
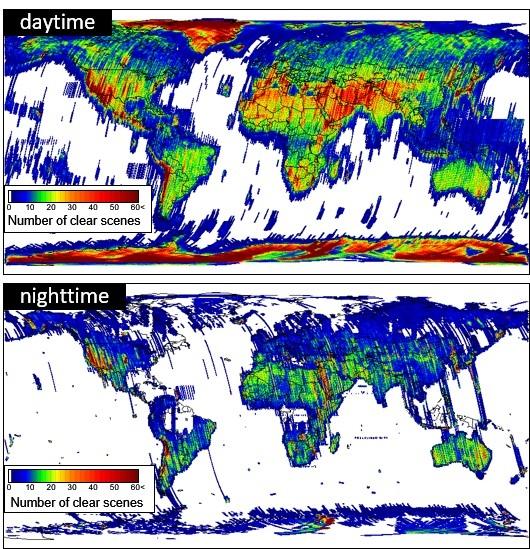
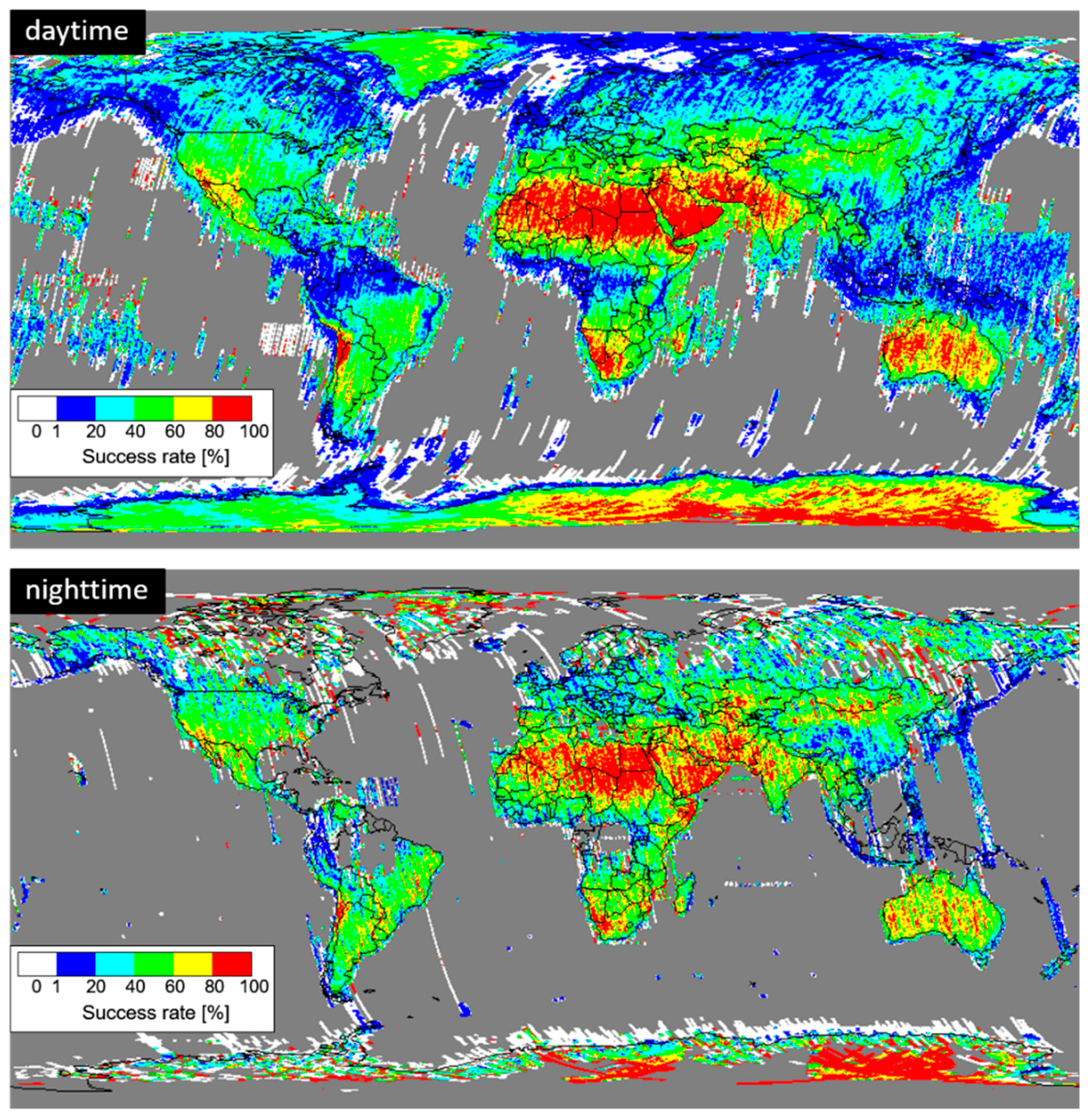
2.3.3. Mapping of the Number of Clear Scenes and the Success Rate
3. Results and Discussion
3.1. Evaluation of MOD35-Based ASTER Cloud Masks
3.1.1. Comparison of ASTER Cloud Coverage Among MOD35 Versions
3.1.2. Rate of High-Uncertain Scenes
3.1.3. Visual Evaluation of ASTER Cloud Mask Images Using Browse Images
3.2. ASTER Mission Operations Analysis Using MOD35-Based ASTER Cloud Masks
3.2.1. Validation of the Cloud Avoidance Function in the ASTER Observation Scheduler
3.2.2. Time-Series Analysis of the Mean Cloud Coverage
3.2.3. Mapping of the Number of Clear Scenes and the Success Rate
4. Summary and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yamaguchi, Y.; Kahle, A.B.; Tsu, H.; Kawakami, T.; Pniel, M. Overview of the advanced spaceborne thermal emission and reflectance radiometer (ASTER). IEEE Trans. Geosci. Remote Sens. 1998, 36, 1062–1071. [Google Scholar] [CrossRef]
- Yamaguchi, Y.; Abrams, M.J.; Kato, M.; Watanabe, H.; Tsu, H. ASTER science outcome and operation status. In Proceedings of the 2005 IEEE International Geoscience and Remote Sensing Symposium, Seoul, Korea, 29 July 2005; pp. 5578–5579. [Google Scholar] [CrossRef]
- Level 1 Data Working Group, ASTER Science Team. ASTER Algorithm Theoretical Basis Document for ASTER Level-1 Data Processing; Ver. 3.0; ERSDAC LEL/8-9; Earth Remote Sensing Data Analysis Center: Tokyo, Japan, 1996. Available online: http://eospso.gsfc.nasa.gov/sites/default/files/atbd/atbd-ast-01.pdf (accessed on 15 September 2019).
- Fujisada, H. ASTER level 1 data processing algorithm. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1101–1112. [Google Scholar] [CrossRef]
- Irish, R. Landsat 7 automatic cloud cover assessment. In Algorithms for Multispectral, Hyperspectral, and Ultraspectral Imagery VI; International Society for Optics and Photonics: Bellingham, WA, USA, 2000; Volume 4049, pp. 348–355. [Google Scholar] [CrossRef]
- Tonooka, H.; Omagari, K.; Yamamoto, H.; Tachikawa, T.; Fujita, M.; Paitaer, Z. ASTER cloud coverage reassessment using MODIS cloud mask products. In Earth Observing Missions and Sensors: Development, Implementation, and Characterization; International Society for Optics and Photonics: Bellingham, WA, USA, 2010; Volume 7862. [Google Scholar] [CrossRef]
- Tonooka, H. ASTER nighttime cloud mask database using MODIS cloud mask (MOD35) products. In Remote Sensing of Clouds and the Atmosphere XIII; International Society for Optics and Photonics: Bellingham, WA, USA, 2008; Volume 7107. [Google Scholar] [CrossRef]
- Meyer, D.; Siemonsma, D.; Brooks, B.; Johnson, L. Advanced Spaceborne Thermal Emission and Reflection Radiometer Level 1 Precision Terrain Corrected Registered At-Sensor Radiance (AST_L1T) Product, Algorithm Theoretical Basis Document; Open-File Report 2015-1171; U.S. Geological Survey: Reston, VA, USA, 2015. [CrossRef]
- Hulley, G.C.; Hook, S.J. A new methodology for cloud detection and classification with ASTER data. Geophys. Res. Lett. 2008, 35, L16812. [Google Scholar] [CrossRef]
- Ackerman, S.A.; Strabala, K.I.; Menzel, W.P.; Frey, R.A.; Moeller, C.C.; Gumley, L.E. Discriminating clear sky from clouds with MODIS. J. Geophys. Res. 1998, 103, 32141–32157. [Google Scholar] [CrossRef]
- Ackerman, S.; Frey, R.; Strabala, K.; Liu, Y.; Gumley, L.; Baum, B.; Menzel, P. Discriminating Clear-Sky from Cloud with MODIS Algorithm Theoretical Basis Document (MOD35); Version 6.1; University of Wisconsin–Madison: Madison, WI, USA, 2010. Available online: https://modis-atmos.gsfc.nasa.gov/sites/default/files/ModAtmo/MOD35_ATBD_Collection6_0.pdf (accessed on 15 September 2019).
- LP DAAC. ASTER Cloud Cover Accuracy Improved. Available online: https://lpdaac.usgs.gov/news/aster-cloud-cover-accuracy-improved/ (accessed on 15 September 2019).
- Tonooka, H. ASTER Cloud Mask Database. Available online: http://tonolab.cis.ibaraki.ac.jp/ASTER/cloud/ (accessed on 15 September 2019).
- Ackerman, S.A.; Holz, R.E.; Frey, R.; Eloranta, E.W.; Maddux, B.C.; McGill, M. Cloud detection with MODIS. Part II: Validation. J. Atmos. Ocean. Technol. 2008, 25, 1073–1086. [Google Scholar] [CrossRef]
- Wilson, A.M.; Parmentier, B.; Jetz, W. Systematic land cover bias in Collection 5 MODIS cloud mask and derived products: A global overview. Remote Sens. Environ. 2014, 141, 149–154. [Google Scholar] [CrossRef]
- Wang, T.; Fetzer, E.J.; Wong, S.; Kahn, B.H.; Yue, Q. Validation of MODIS cloud mask and multilayer flag using CloudSat-CALIPSO cloud profiles and a cross-reference of their cloud classifications. J. Geophys. Res. Atmos. 2016, 121, 11620–11635. [Google Scholar] [CrossRef]
- Moeller, C.; Frey, R. Terra MODIS Collection 6.1 Calibration and Cloud Product Changes, Version 1.0 (27 June 2017). Available online: https://modis-atmos.gsfc.nasa.gov/sites/default/files/ModAtmo/C6.1_Calibration_and_Cloud_Product_Changes_UW_frey_CCM_1.pdf (accessed on 15 September 2019).
- Muraoka, H.; Cohen, R.H.; Ohno, T.; Doi, N. ASTER observation scheduling algorithm. In Proceedings of the International Symposium Space Mission Operations and Ground Data Systems, Tokyo, Japan, 1–5 June 1998. [Google Scholar]
- King, M.D.; Platnick, S.; Menzel, W.P.; Ackerman, S.A.; Hubanks, P.A. Spatial and temporal distribution of clouds observed by MODIS onboard the Terra and Aqua satellites. IEEE Trans. Geosci. Remote Sens. 2013, 51, 3826–3852. [Google Scholar] [CrossRef]
- Frey, R.A.; Acherman, S.A.; Liu, Y.; Strabala, K.I.; Zhang, H.; Key, J.R.; Wang, X. Cloud detection with MODIS. Part I: Improvements in the MODIS cloud mask for Collection 5. J. Atmos. Ocean. Technol. 2008, 25, 1057–1072. [Google Scholar] [CrossRef]
- Frey, R. Collection 6 Updates to the MODIS Cloud Mask (MOD35). 2010. Available online: https://modis.gsfc.nasa.gov/sci_team/meetings/201001/presentations/atmos/frey.pdf (accessed on 15 September 2019).
- Wilson, T.; Wu, A.; Shrestha, A.; Geng, X.; Wang, Z.; Moeller, C.; Frey, R.; Xiong, X. Development and implementation of an electronic crosstalk correction for bands 27–30 in Terra MODIS collection 6. Remote Sens. 2017, 9, 569. [Google Scholar] [CrossRef]
- Level-1B (L1B) Calibration, Collection 6.0 and Collection 6.1 Changes, Terra and Aqua MODIS. Available online: https://atmosphere-imager.gsfc.nasa.gov/sites/default/files/ModAtmo/C061_L1B_Combined_v10.pdf (accessed on 15 September 2019).
- MODIS/Terra Data Outages. Available online: https://modaps.modaps.eosdis.nasa.gov/services/production/outages_terra.html (accessed on 15 September 2019).
- NOAA/National Weather Service, National Centers for Environmental Prediction, Environmental Modeling Center. Global Forecast System (GFS). Available online: https://www.emc.ncep.noaa.gov/GFS/ (accessed on 15 September 2019).
- Seabold, S.; Perktold, J. Statsmodels: Econometric and statistical modeling with python. In Proceedings of the 9th Python in Science Conference (SciPy 2010), Austin, TX, USA, 28–30 June 2010. [Google Scholar]
- World Meteorological Organization. El Niño/Southern Oscillation. WMO-No.1145. 2014. Available online: http://www.wmo.int/pages/prog/wcp/wcasp/documents/JN142122_WMO1145_EN_web.pdf (accessed on 15 September 2019).
- NOAA/National Weather Service, Climate Prediction Center. Historical El Nino/La Nina episodes (1950–present). Available online: https://origin.cpc.ncep.noaa.gov/products/analysis_monitoring/ensostuff/ONI_v5.php (accessed on 15 September 2019).
- Raup, B.H.; Racoviteanu, A.; Khalsa, S.J.S.; Helm, C.; Armstrong, R.; Arnaud, Y. The GLIMS geospatial glacier database: A new tool for studying glacier change. Glob. Planet. Chang. 2007, 56, 101–110. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subsystem | Spectral Range [μm] | Ground Resolution |
|---|---|---|
| VNIR | Band 1: 0.52−0.60 Band 2: 0.63−0.69 Band 3N, 3B: 0.78−0.86 | 15 m |
| SWIR | Band 4: 1.600−1.700 Band 5: 2.145−2.185 Band 6: 2.185−2.225 Band 7: 2.235−2.285 Band 8: 2.295−2.365 Band 9: 2.360−2.430 | 30 m |
| TIR | Band 10: 8.125−8.475 Band 11: 8.475−8.825 Band 12: 8.925−9.275 Band 13: 10.25−10.95 Band 14: 10.95−11.65 | 90 m |
| Parameter | C6 Minus C5 | C6.1 Minus C6 | ||
|---|---|---|---|---|
| Daytime | Nighttime | Daytime | Nighttime | |
| bias | −5.7% | −1.4% | −0.6% | −0.6% |
| R10% | 18.5% | 16.3% | 1.9% | 2.1% |
| R50% | 6.5% | 2.8% | 0.4% | 0.3% |
| Day/Night | RMS Difference of MCC | RMS Difference of Clear-scene Rate | ||
|---|---|---|---|---|
| no Common | with Common | no Common | with Common | |
| daytime | 20.1% | 11.4% | 21.5% | 12.3% |
| nighttime | 25.3% | 15.4% | 25.8% | 15.8% |
| Grid Cell | Daytime | Nighttime | ||||
|---|---|---|---|---|---|---|
| Period 1 | Period 2 | diff. | Period 1 | Period 2 | diff. | |
| (A) USA | 29.1 | 23.3 | −5.8 | 24.2 | 26.0 | 1.8 |
| (B) Argentina | 24.0 | 18.3 | −5.7 | 25.6 | 26.3 | 0.7 |
| (C) Mozambique | 39.0 | 31.2 | −7.9 | 33.7 | 27.4 | −6.3 |
| (D) Indonesia | 60.7 | 60.3 | −0.5 | 64.0 | 67.8 | 3.8 |
| (E) Japan | 64.9 | 59.4 | −5.4 | 66.7 | 62.8 | −3.9 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tonooka, H.; Tachikawa, T. ASTER Cloud Coverage Assessment and Mission Operations Analysis Using Terra/MODIS Cloud Mask Products. Remote Sens. 2019, 11, 2798. https://doi.org/10.3390/rs11232798
Tonooka H, Tachikawa T. ASTER Cloud Coverage Assessment and Mission Operations Analysis Using Terra/MODIS Cloud Mask Products. Remote Sensing. 2019; 11(23):2798. https://doi.org/10.3390/rs11232798
Chicago/Turabian StyleTonooka, Hideyuki, and Tetsushi Tachikawa. 2019. "ASTER Cloud Coverage Assessment and Mission Operations Analysis Using Terra/MODIS Cloud Mask Products" Remote Sensing 11, no. 23: 2798. https://doi.org/10.3390/rs11232798
APA StyleTonooka, H., & Tachikawa, T. (2019). ASTER Cloud Coverage Assessment and Mission Operations Analysis Using Terra/MODIS Cloud Mask Products. Remote Sensing, 11(23), 2798. https://doi.org/10.3390/rs11232798