Intensity Data Correction for Long-Range Terrestrial Laser Scanners: A Case Study of Target Differentiation in an Intertidal Zone


Abstract
:
1. Introduction
2. Principles and Methodology
2.1. Principles of Intensity Correction
2.2. Improved Method for Polynomial Parameters Estimation
3. Experiments
3.1. Instruments
3.2. Indoor Experiments
3.3. Outdoor Experiments
4. Results
4.1. Indoor Experiments
4.2. Outdoor Experiments
5. Method Validation
5.1. Study Site
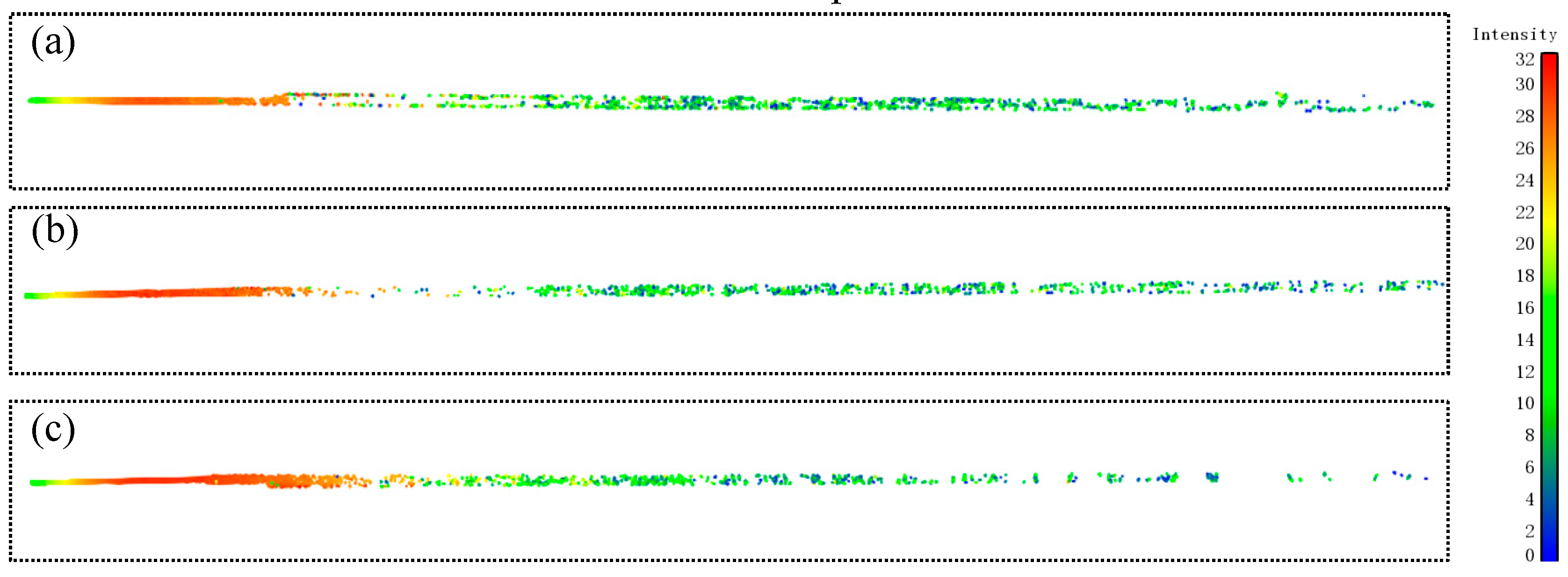
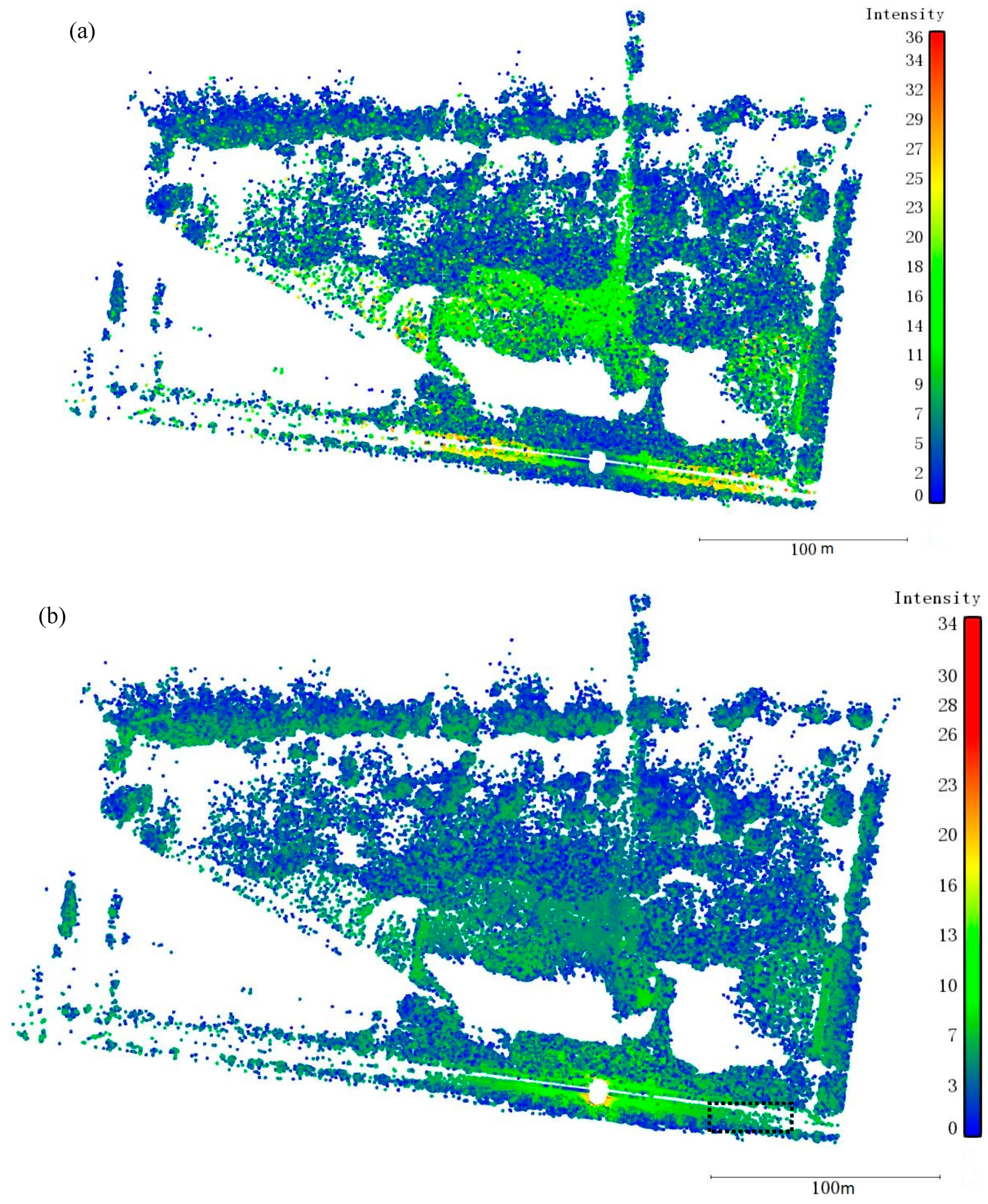
5.2. Intensity Correction
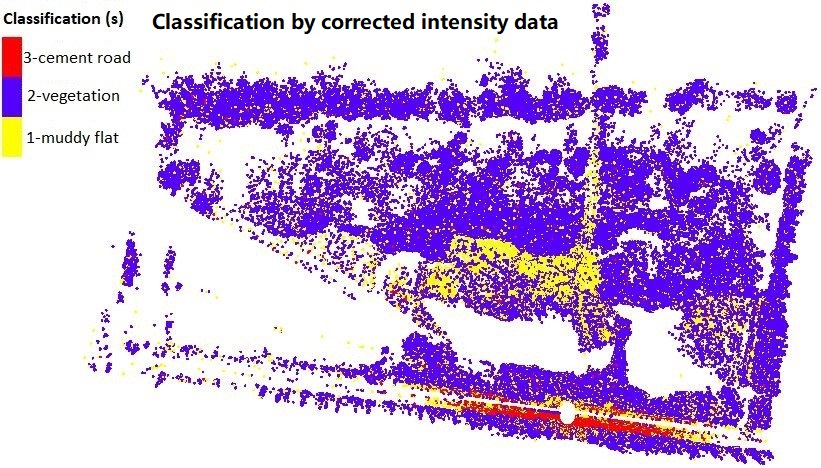
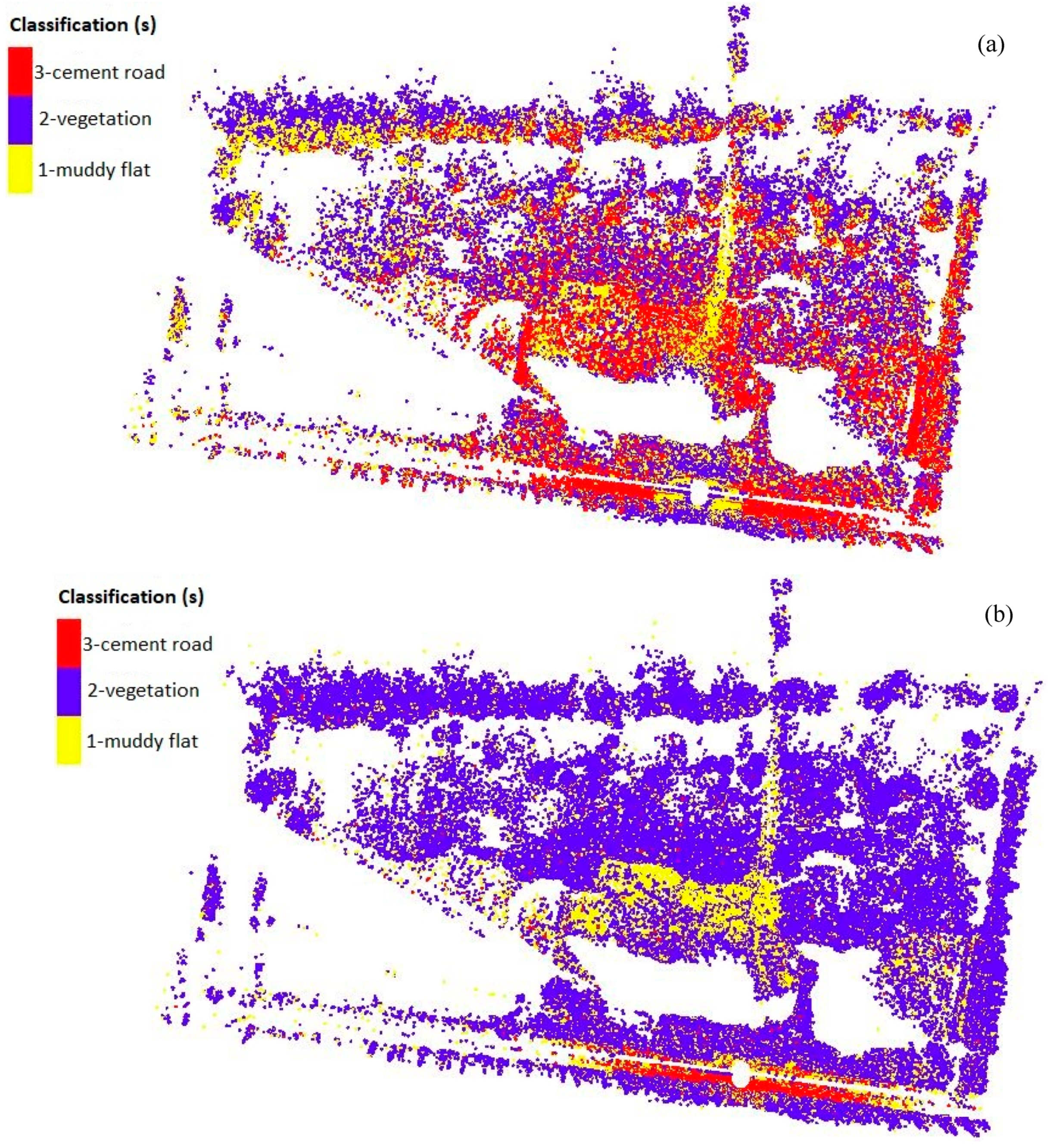
5.3. Point Cloud Classification
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Telling, J.; Lyda, A.; Hartzell, P.; Glennie, C. Review of Earth science research using terrestrial laser scanning. Earth Sci. Rev. 2017, 169, 35–68. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Zhao, W.; Huang, L.; Vimarlund, V.; Wang, Z. Applications of terrestrial laser scanning for tunnels: A review. J. Traff. Trans. Eng. 2014, 1, 325–337. [Google Scholar] [CrossRef]
- Dassot, M.; Constant, T.; Fournier, M. The use of terrestrial LiDAR technology in forest science: Application fields, benefits and challenges. Ann. For. Sci. 2011, 68, 959–974. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef] [Green Version]
- Pinkerton, H.; Applegarth, L.J.; James, M.R. Detecting the development of active lava flow fields with a very-long-range terrestrial laser scanner and thermal imagery. Geophys. Res. Lett. 2009, 36, 355. [Google Scholar]
- López-Moreno, J.I.; Revuelto, J.; González, E.A.; Sanmiguel-Vallelado, A.; Fassnacht, S.R.; Deems, J.; Morán-Tejeda, E. Using very long-range terrestrial laser scanner to analyze the temporal consistency of the snowpack distribution in a high mountain environment. J. Mt. Sci. 2017, 14, 823–842. [Google Scholar] [CrossRef]
- Xie, W.; He, Q.; Zhang, K.; Guo, L.; Wang, X.; Shen, J.; Cui, Z. Application of terrestrial laser scanner on tidal flat morphology at a typhoon event timescale. Geomorphology 2017, 292, 47–58. [Google Scholar] [CrossRef]
- Thers, H.; Brunbjerg, A.K.; Læssøe, T.; Ejrnæs, R.; Bøcher, P.K.; Svenning, J.-C. Lidar-derived variables as a proxy for fungal species richness and composition in temperate Northern Europe. Remote Sens. Environ. 2017, 200, 102–113. [Google Scholar] [CrossRef]
- Kaasalainen, S.; Krooks, A.; Kukko, A.; Kaartinen, H. Radiometric Calibration of Terrestrial Laser Scanners with External Reference Targets. Remote Sens. 2009, 1, 144–158. [Google Scholar] [CrossRef] [Green Version]
- Kaasalainen, S.; Jaakkola, A.; Kaasalainen, M.; Krooks, A.; Kukko, A. Analysis of Incidence Angle and Distance Effects on Terrestrial Laser Scanner Intensity: Search for Correction Methods. Remote Sens. 2011, 3, 2207–2221. [Google Scholar] [CrossRef] [Green Version]
- Höfle, B.; Pfeifer, N. Correction of laser scanning intensity data: Data and model-driven approaches. ISPRS J. Photogramm. Remote Sens. 2007, 62, 415–433. [Google Scholar] [CrossRef]
- Armesto-González, J.; Riveiro-Rodríguez, B.; González-Aguilera, D.; Rivas-Brea, M.T. Terrestrial laser scanning intensity data applied to damage detection for historical buildings. J. Archaeol. Sci. 2010, 37, 3037–3047. [Google Scholar] [CrossRef]
- Yan, W.Y.; Shaker, A. Radiometric normalization of overlapping LiDAR intensity data for reduction of striping noise. Int. J. Digit. Earth 2015, 9, 1–13. [Google Scholar]
- Poux, F.; Neuville, R.; Van Wersch, L.; Nys, G.-A.; Billen, R. 3D Point Clouds in Archaeology: Advances in Acquisition, Processing and Knowledge Integration Applied to Quasi-Planar Objects. Geosciences 2017, 7, 96. [Google Scholar] [CrossRef]
- Yan, W.Y.; Shaker, A. Radiometric Correction and Normalization of Airborne LiDAR Intensity Data for Improving Land-Cover Classification. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7658–7673. [Google Scholar]
- Errington, A.F.C.; Daku, B.L.F. Temperature Compensation for Radiometric Correction of Terrestrial LiDAR Intensity Data. Remote Sens. 2017, 9, 356. [Google Scholar] [CrossRef]
- Zhu, X.; Wang, T.; Darvishzadeh, R.; Skidmore, A.K.; Niemann, K.O. 3D leaf water content mapping using terrestrial laser scanner backscatter intensity with radiometric correction. ISPRS J. Photogramm. Remote Sens. 2015, 110, 14–23. [Google Scholar] [CrossRef]
- Tan, K.; Cheng, X. Correction of Incidence Angle and Distance Effects on TLS Intensity Data Based on Reference Targets. Remote Sens. 2016, 8, 251. [Google Scholar] [CrossRef]
- Xu, T.; Xu, L.; Yang, B.; Li, X.; Yao, J. Terrestrial Laser Scanning Intensity Correction by Piecewise Fitting and Overlap-Driven Adjustment. Remote Sens. 2017, 9, 1090. [Google Scholar] [CrossRef]
- Fang, W.; Huang, X.; Zhang, F.; Li, D. Intensity Correction of Terrestrial Laser Scanning Data by Estimating Laser Transmission Function. IEEE Trans. Geosci. Remote Sens. 2015, 53, 942–951. [Google Scholar] [CrossRef]
- Franceschi, M.; Teza, G.; Preto, N.; Pesci, A.; Galgaro, A.; Girardi, S. Discrimination between marls and limestones using intensity data from terrestrial laser scanner. ISPRS J. Photogramm. Remote Sens. 2009, 64, 522–528. [Google Scholar] [CrossRef]
- Teo, T.-A.; Yu, H.-L. Empirical Radiometric Normalization of Road Points from Terrestrial Mobile Lidar System. Remote Sens. 2015, 7, 6336–6357. [Google Scholar] [CrossRef] [Green Version]
- Höfle, B. Radiometric Correction of Terrestrial LiDAR Point Cloud Data for Individual Maize Plant Detection. IEEE Geosci. Remote Sens. Lett. 2014, 11, 94–98. [Google Scholar] [CrossRef]
- Burton, D.; Dunlap, D.B.; Wood, L.J.; Flaig, P.P. LiDAR intensity as a remote sensor of rock properties. J. Sediment. Res. 2011, 81, 339–347. [Google Scholar] [CrossRef]
- Tan, K.; Cheng, X. Intensity data correction based on incidence angle and distance for terrestrial laser scanner. J. Appl. Remote Sens. 2015, 9, 94094. [Google Scholar] [CrossRef]
- Carrea, D.; Abellan, A.; Humair, F.; Matasci, B.; Derron, M.-H.; Jaboyedoff, M. Correction of terrestrial LiDAR intensity channel using Oren–Nayar reflectance model: An application to lithological differentiation. ISPRS J. Photogramm. Remote Sens. 2016, 113, 17–29. [Google Scholar] [CrossRef]
- Kashani, A.G.; Olsen, M.J.; Parrish, C.E.; Wilson, N. A Review of LiDAR radiometric processing: From Ad Hoc intensity correction to rigorous radiometric calibration. Sensors 2015, 15, 28099–28128. [Google Scholar] [CrossRef]
- Soudarissanane, S.; Lindenbergh, R.; Menenti, M.; Teunissen, P. Scanning geometry: Influencing factor on the quality of terrestrial laser scanning points. ISPRS J. Photogramm. Remote Sens. 2011, 66, 389–399. [Google Scholar] [CrossRef]
- Herrero-Pascual, J.; Felipe-García, B.; Hernández-López, D.; Rodríguez-Gonzálvez, P.; González-Aguilera, D.; Del Pozo, S. Multispectral Radiometric Analysis of Façades to Detect Pathologies from Active and Passive Remote Sensing. Remote Sens. 2016, 8, 80. [Google Scholar] [CrossRef]
- Tan, K.; Cheng, X.; Ding, X.; Zhang, Q. Intensity Data Correction for the Distance Effect in Terrestrial Laser Scanners. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 304–312. [Google Scholar] [CrossRef]
- Tan, K.; Cheng, X. Specular Reflection Effects Elimination in Terrestrial Laser Scanning Intensity Data Using Phong Model. Remote Sens. 2017, 9, 853. [Google Scholar] [CrossRef]
- Zhao, X.; Guo, Q.; Su, Y.; Xue, B. Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas. ISPRS J. Photogramm. Remote Sens. 2016, 117, 79–91. [Google Scholar] [CrossRef] [Green Version]
- Pesci, A.; Teza, G.; Ventura, G. Remote sensing of volcanic terrains by terrestrial laser scanner: Preliminary reflectance and RGB implications for studying Vesuvius crater (Italy). Ann. Geophys. 2008, 51, 633–653. [Google Scholar]
- Prantl, H.; Nicholson, L.; Sailer, R.; Hanzer, F.; Juen, I.F.; Rastner, P. Glacier Snowline Determination from Terrestrial Laser Scanning Intensity Data. Geosciences 2017, 7, 60. [Google Scholar] [CrossRef]
- Podgórski, J.; Pętlicki, M.; Kinnard, C. Revealing recent calving activity of a tidewater glacier with terrestrial LiDAR reflection intensity. Cold Regions Sci. Technol. 2018, 151, 288–301. [Google Scholar] [CrossRef]
- Olsoy, P.J.; Glenn, N.F.; Clark, P.E. Estimating Sagebrush Biomass Using Terrestrial Laser Scanning. Rangel. Ecol. Manag. 2014, 67, 224–228. [Google Scholar] [CrossRef]
- Kukko, A.; Kaasalainen, S.; Litkey, P. Effect of incidence angle on laser scanner intensity and surface data. Appl. Opt. 2008, 47, 986–999. [Google Scholar] [CrossRef]
- Kaasalainen, S.; Vain, A.; Krooks, A.; Kukko, A. Topographic and distance effects in laser scanner intensity correction. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2009, 38, 219–222. [Google Scholar]
- Cheng, X.; Tan, K.; Cheng, X. Modeling hemispherical reflectance for natural surfaces based on terrestrial laser scanning backscattered intensity data. Opt. Express 2016, 24, 22971. [Google Scholar]
- Ding, Q.; Chen, W.; King, B.; Liu, Y.; Liu, G. Combination of overlap-driven adjustment and Phong model for LiDAR intensity correction. ISPRS J. Photogramm. Remote Sens. 2013, 75, 40–47. [Google Scholar] [CrossRef]
- Poullain, E.; Garestier, F.; Levoy, F.; Bretel, P. Analysis of ALS Intensity Behavior as a Function of the Incidence Angle in Coastal Environments. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1–13. [Google Scholar] [CrossRef]
- Riegl_VZ-4000_Datasheet. Available online: http://www.riegl.com/uploads/tx_pxpriegldownloads/RIEGL_VZ-4000_Datasheet_2018-12-05.pdf (accessed on 1 January 2019).
- RiSCAN PRO 2.0. Available online: http://www.riegl.com/products/software-packages/riscan-pro/ (accessed on 6 December 2018).
- Jueterbock, A.; Smolina, I.; Coyer, J.A.; Hoarau, G. The fate of the Arctic seaweedFucus distichusunder climate change: an ecological niche modeling approach. Ecol. Evol. 2016, 6, 1712–1724. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hemery, L.G.; Marion, S.R.; Romsos, C.G.; Kurapov, A.L.; Henkel, S.K. Ecological niche and species distribution modelling of sea stars along the Pacific Northwest continental shelf. Divers. Distrib. 2016, 22, 1314–1327. [Google Scholar] [CrossRef]
- Cuadrado, D.G.; Perillo, G.M.; Vitale, A.J. Modern microbial mats in siliciclastic tidal flats: Evolution, structure and the role of hydrodynamics. Mar. Geol. 2014, 352, 367–380. [Google Scholar] [CrossRef]
- Guo, C.; He, Q.; Van Prooijen, B.C.; Guo, L.; Manning, A.J.; Bass, S. Investigation of flocculation dynamics under changing hydrodynamic forcing on an intertidal mudflat. Mar. Geol. 2018, 395, 120–132. [Google Scholar] [CrossRef]
- Fabbri, S.; Giambastiani, B.M.; Sistilli, F.; Scarelli, F.; Gabbianelli, G. Geomorphological analysis and classification of foredune ridges based on Terrestrial Laser Scanning (TLS) technology. Geomorphology 2017, 295, 436–451. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 3 | 1 | −3.38 × 10−3 | 2.38 × 10−5 | −9.73 × 10−7 |
| 7 | −7.49 × 10−2 | 2.55 | 27.55 | 140.07 | −377.53 | 552.08 | −394.38 | 1 |
| Data Source | Muddy Flat | Vegetation | Cement Road |
|---|---|---|---|
| Original intensity | 0.3845 | 0.3980 | 0.2458 |
| Incidence angle-corrected intensity | 0.2378 | 0.2625 | 0.1882 |
| Distance-corrected intensity | 0.2845 | 0.3267 | 0.1442 |
| Final corrected intensity | 0.1896 | 0.2055 | 0.0894 |
| Data Source | Muddy Flat | Vegetation | Cement Road |
|---|---|---|---|
| Original intensity | Number: 181,183 Intensity: 14–22 | Number: 131,140 Intensity: 0–14 | Number: 619,058 Intensity: 22–32 |
| Incidence angle-corrected intensity | Number: 472,214 Intensity: 6–13 | Number: 262,525 Intensity: 0–6 | Number: 196,642 Intensity: 13–36 |
| Distance-corrected intensity | Number: 307,959 Intensity: 4–8 | Number: 569,008 Intensity: 0–4 | Number: 54,414 Intensity: 8–34 |
| Final corrected intensity | Number: 358,925 Intensity: 4–7 | Number: 366,145 Intensity: 0–4 | Number: 206,311 Intensity: 7–33 |
| Manual and commercial software classification | Number: 285,073 | Number: 453,347 | Number: 192,961 |
| Muddy Flat | Vegetation | Cement Road | Total | User Acuracy (U) | |
|---|---|---|---|---|---|
| Muddy flat | 102,835 | 53,114 | 25,234 | 181,183 | 56.76% |
| Vegetation | 24,408 | 66,389 | 40,343 | 131,140 | 50.62% |
| Cement road | 157,830 | 333,844 | 127,384 | 619,058 | 20.58% |
| Total | 285,073 | 453,347 | 192,961 | 931,381 | |
| Producer accuracy (). | 36.07% | 14.64% | 66.05% | ||
| 44.11% | 22.% | 31.38% | Overall accuracy: 31.85% |
| Muddy Flat | Vegetation | Cement Road | Total | User Accuracy (U) | |
|---|---|---|---|---|---|
| Muddy flat | 173,437 | 249,674 | 49,103 | 472,214 | 36.73% |
| Vegetation | 50,761 | 190,264 | 21,500 | 262,525 | 72.47% |
| Cement road | 60,875 | 13,409 | 122,358 | 196,642 | 62.22% |
| Total | 285,073 | 453,347 | 192,961 | 931,381 | |
| Producer accuracy () | 60.84% | 41.97% | 63.41% | ||
| 45.81% | 53.16% | 62.81% | Overall accuracy: 52.19% |
| Muddy Flat | Vegetation | Cement Road | Total | User Accuracy (U) | |
|---|---|---|---|---|---|
| Muddy flat | 221,322 | 281,087 | 66,599 | 569,008 | 38.90% |
| Vegetation | 61,361 | 164,581 | 82,017 | 307,959 | 53.44% |
| Cement road | 2,390 | 7,679 | 44,345 | 54,414 | 81.50% |
| Total | 285,073 | 453,347 | 192,961 | 931,381 | |
| Producer accuracy () | 77.64% | 36.30% | 22.98% | ||
| 51.83% | 43.23% | 35.85% | Overall accuracy: 46.19% |
| Muddy Flat | Vegetation | Cement Road | Total | User Accuracy (U) | |
|---|---|---|---|---|---|
| Muddy flat | 244,065 | 104,508 | 10,352 | 358,925 | 68.00% |
| Vegetation | 38,342 | 325,540 | 2,263 | 366,145 | 88.91% |
| Cement road | 2,666 | 23,299 | 180,346 | 206,311 | 87.41% |
| Total | 285,073 | 453,347 | 192,961 | 931,381 | |
| Producer accuracy () | 85.61% | 71.81% | 93.46% | ||
| 75.80% | 79.45% | 90.33% | Overall accuracy: 80.52% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, K.; Chen, J.; Qian, W.; Zhang, W.; Shen, F.; Cheng, X. Intensity Data Correction for Long-Range Terrestrial Laser Scanners: A Case Study of Target Differentiation in an Intertidal Zone. Remote Sens. 2019, 11, 331. https://doi.org/10.3390/rs11030331
Tan K, Chen J, Qian W, Zhang W, Shen F, Cheng X. Intensity Data Correction for Long-Range Terrestrial Laser Scanners: A Case Study of Target Differentiation in an Intertidal Zone. Remote Sensing. 2019; 11(3):331. https://doi.org/10.3390/rs11030331
Chicago/Turabian StyleTan, Kai, Jin Chen, Weiwei Qian, Weiguo Zhang, Fang Shen, and Xiaojun Cheng. 2019. "Intensity Data Correction for Long-Range Terrestrial Laser Scanners: A Case Study of Target Differentiation in an Intertidal Zone" Remote Sensing 11, no. 3: 331. https://doi.org/10.3390/rs11030331
APA StyleTan, K., Chen, J., Qian, W., Zhang, W., Shen, F., & Cheng, X. (2019). Intensity Data Correction for Long-Range Terrestrial Laser Scanners: A Case Study of Target Differentiation in an Intertidal Zone. Remote Sensing, 11(3), 331. https://doi.org/10.3390/rs11030331