New Approaches for Robust and Efficient Detection of Persistent Scatterers in SAR Tomography

Abstract
:
1. Introduction
2. Basic Theory and New Approaches for the Detection of PSs
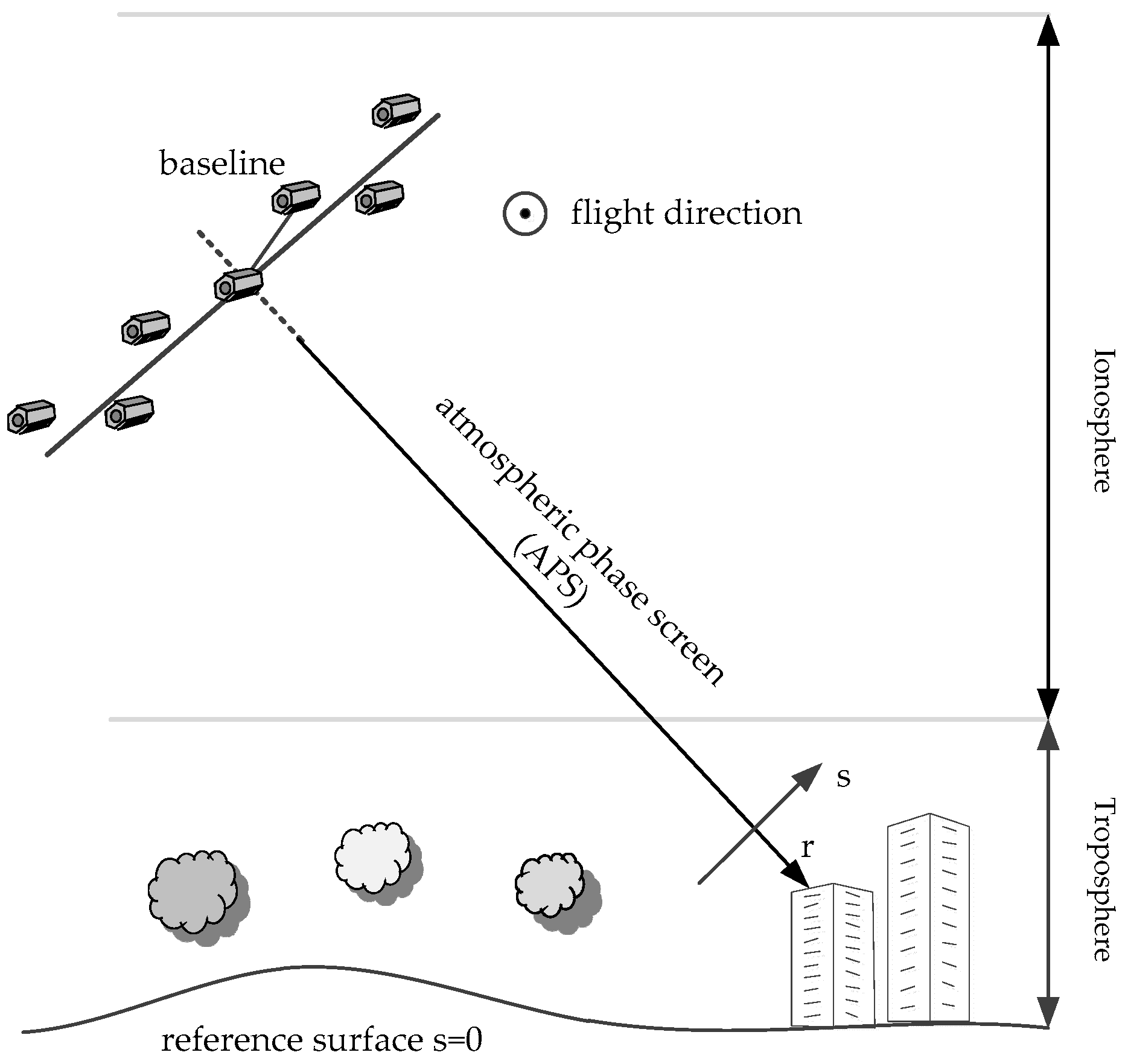
2.1. Signal Model of Three-Dimensional SAR Tomography
2.2. New Approaches for the Detection of PSs
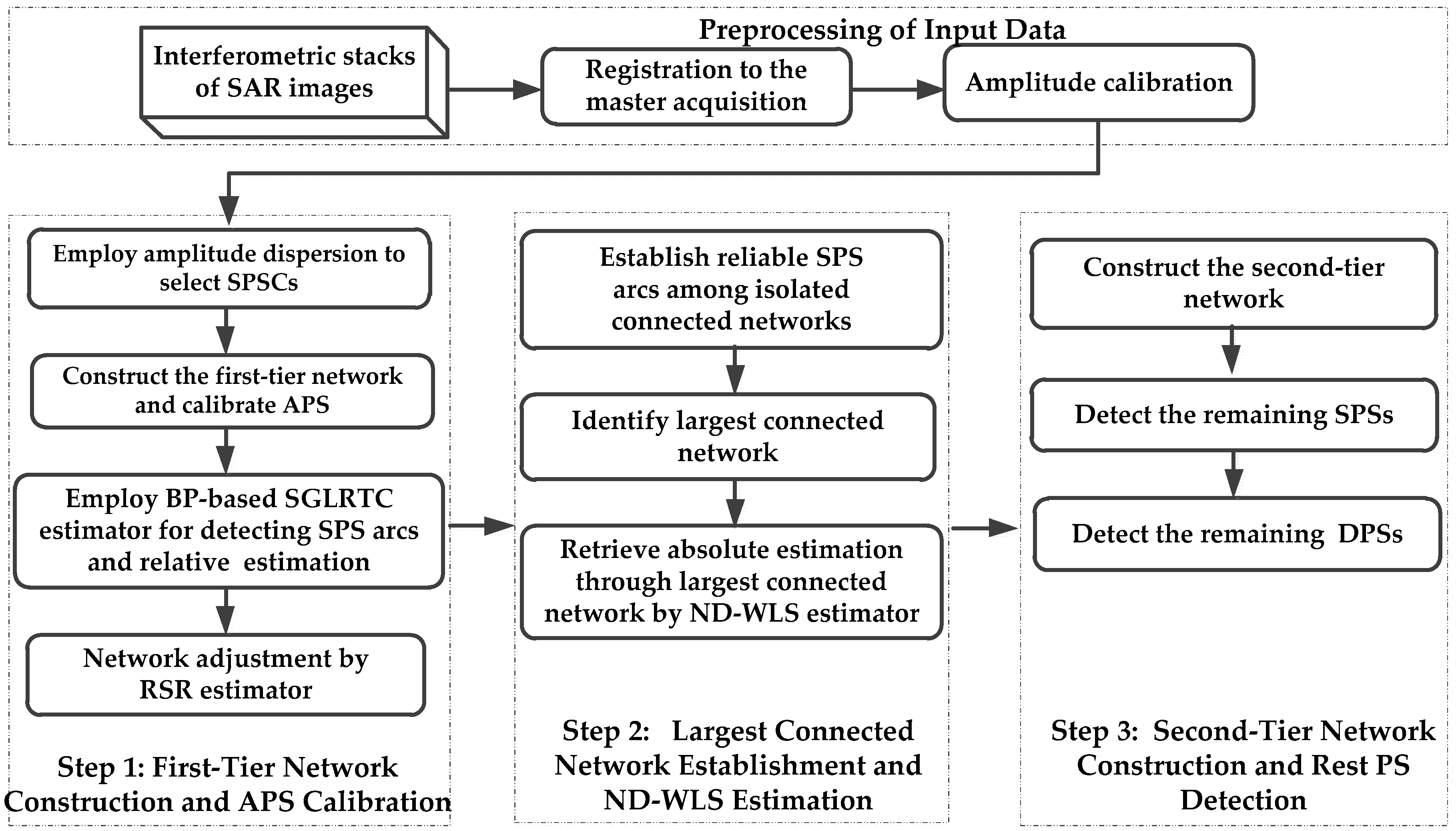
2.2.1. First-Tier Network Construction and APS Calibration
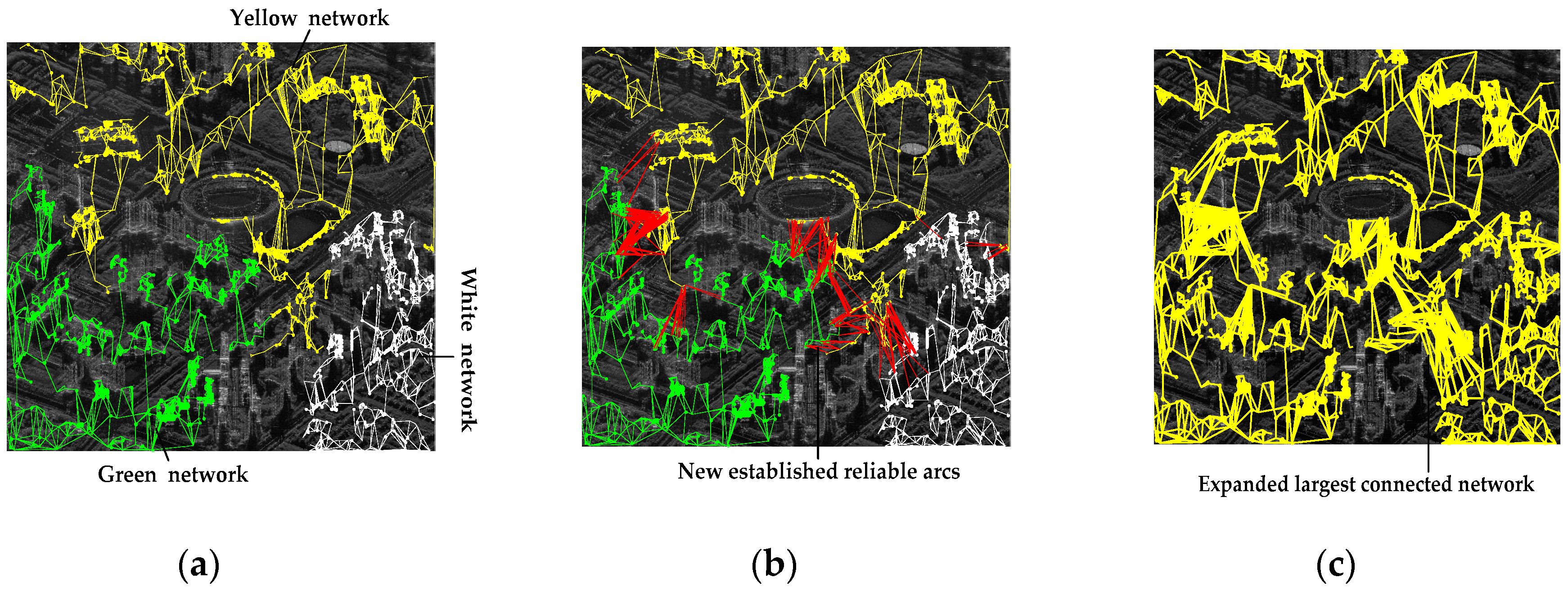
2.2.2. Largest Connected Network Establishment and ND-WLS estimation
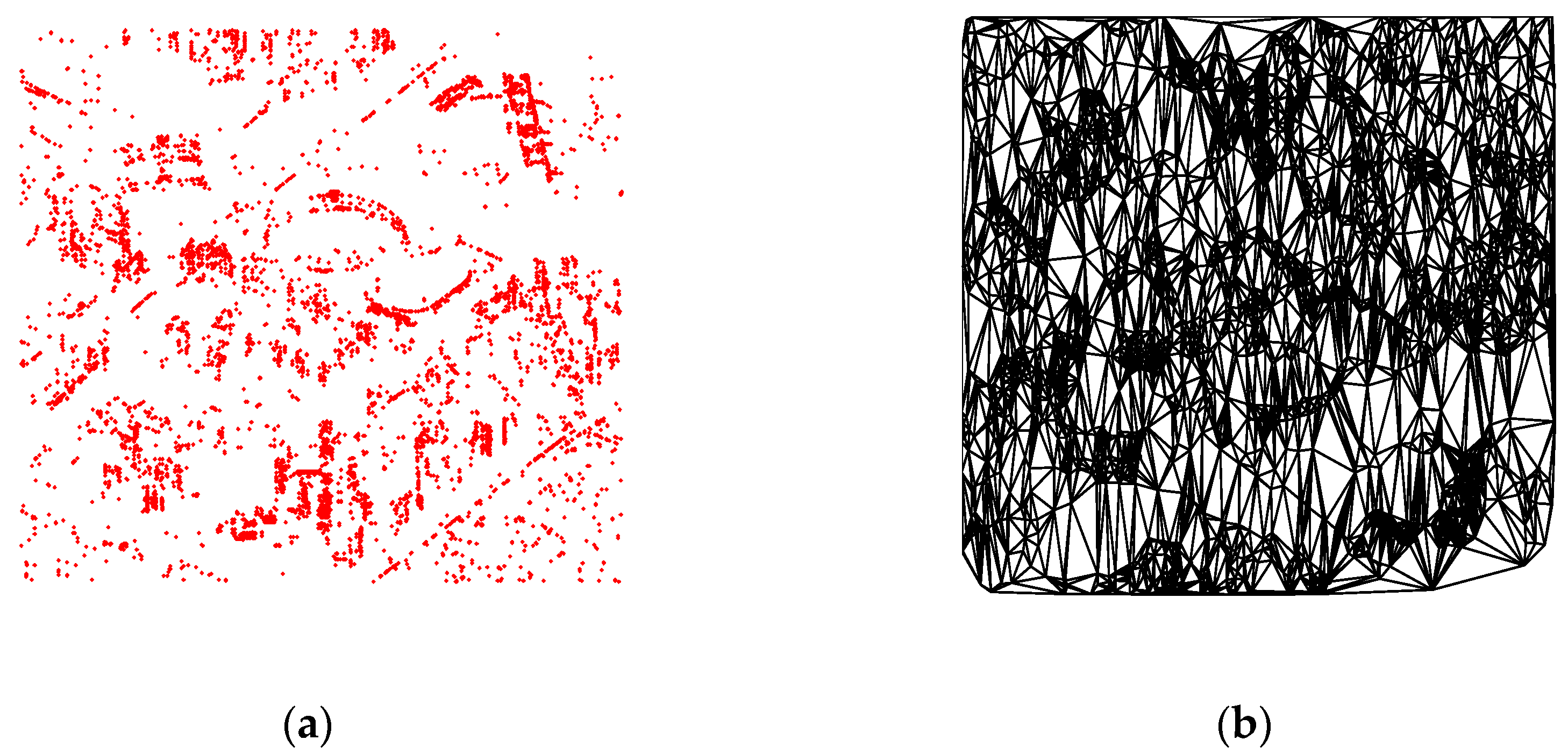
- First, we find and preserve all the main isolated connected networks with considerable number of SPSs (typically more than one-tenth of the total SPSs) and omit tiny networks with very few SPSs. In this way, the observed area is divided by the main isolated networks.
- Second, we attempt to establish arcs among the main isolated networks. Taking two arbitrary networks as example, SPSs in one network are chosen as reference points. New SPS arcs are established by connecting the reference points with the nearby SPSs in another network. Then, the APS is calibrated by removing the phase of the reference points in the new established arcs. All established arcs should be no longer than the distance threshold.
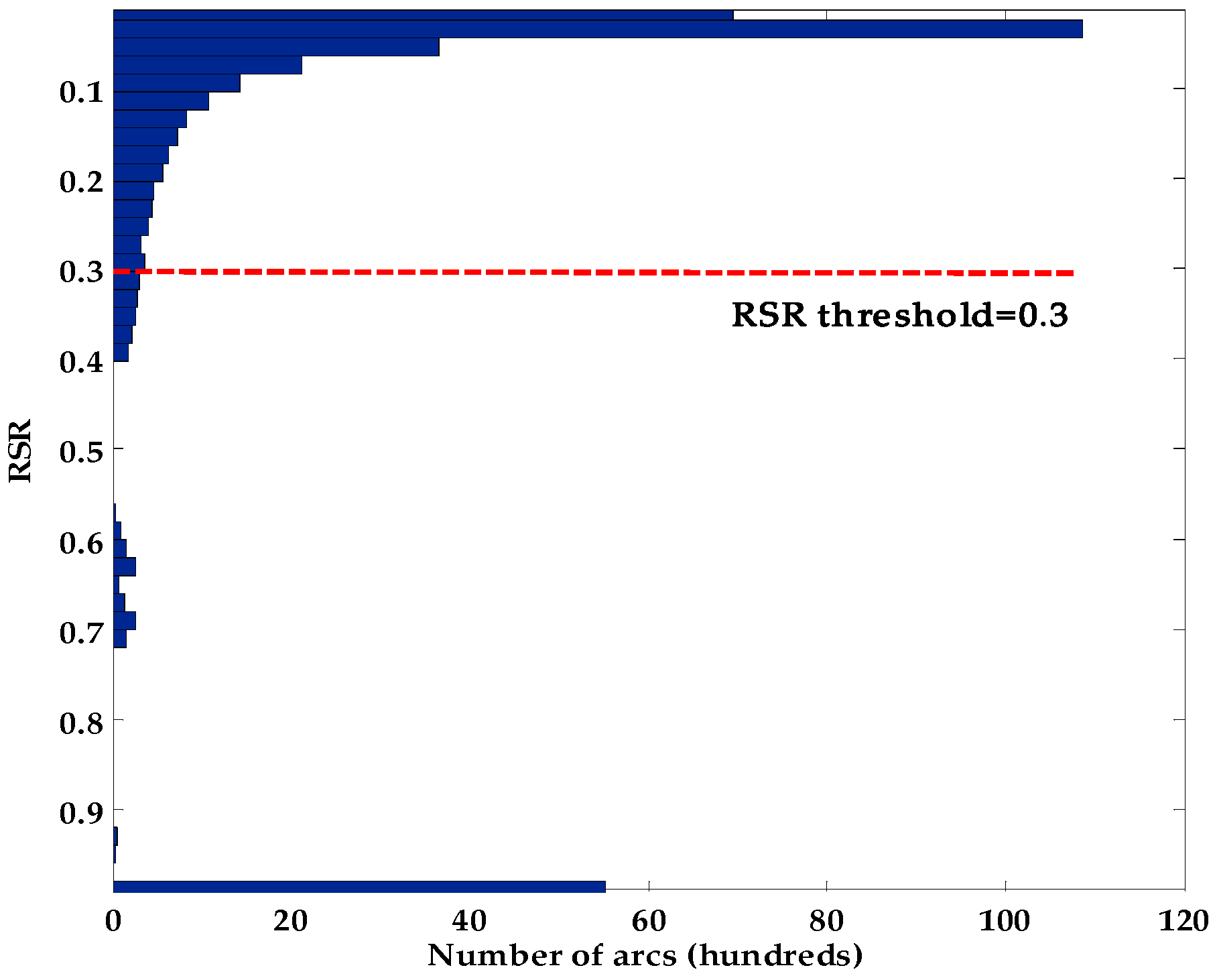
- Third, we employ BF-based SGLRTC to obtain the relative estimation of the newly established SPS arcs. Similarly, The RSR estimator is used to measure the level of residual APS and evaluate the goodness of the relative estimates of the newly established SPS arcs. The ones with RSR values larger than RSR threshold (usually 0.3) are then rejected. This provides a simple way to establish reliable SPS arcs with accurate estimation to connect the main isolated networks.
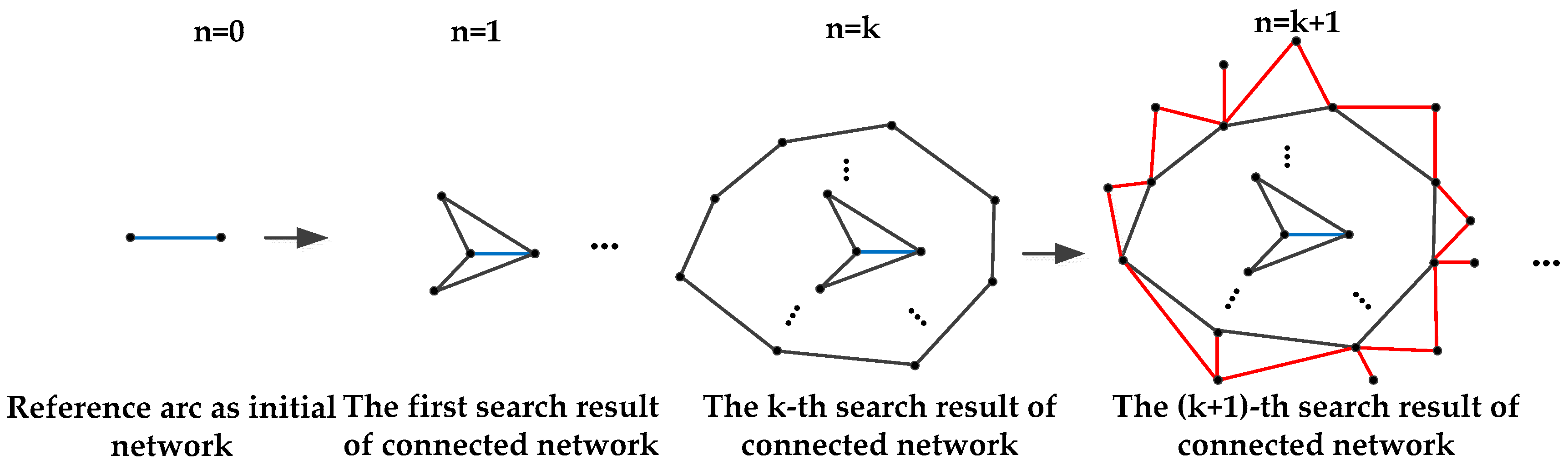
- Lastly, we identify the largest connected network in the first-tier network after establishing reliable arcs among the main isolated networks. In this way, we expand the largest connected network with more manual structure information subtracted.
| ND-WLS estimator: Initialize : we start from the searched connected network with SPS arcs and SPSs. We apply WLS estimator to retrieve . 1. Let , the searched connected network with SPS arcs and SPSs can be retrieved: . Stop when (no new directly connected arcs found). |
2.2.3. Second-Tier Network Construction and Detection of the Remaining PSs
3. Results
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Cigna, F.; Lasaponara, R.; Masini, N.; Milillo, P.; Tapete, D. Persistent Scatterer Interferometry Processing of COSMO-SkyMed Stripmap HIMAGE Time Series to Depict Deformation of the Historic Centre of Rome, Italy. Remote Sens. 2014, 6, 12593–12618. [Google Scholar] [CrossRef]
- Perissin, D.; Prati, C.; Rocca, F.; Teng, W. PSInSAR Analysis over the Three Gorges Dam and Urban areas in China. In Proceedings of the Urban Remote Sensing Event, Shanghai, China, 20–22 May 2009; pp. 1–5. [Google Scholar]
- Perissin, D.; Prati, C.; Rocca, F. ASAR parallel-track PS analysis in urban sites. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Barcelona, Spain, 23–28 July 2007; pp. 1167–1170. [Google Scholar]
- Milillo, P.; Roland, B.; Lundgren, P.; Salzer, J.; Milillo, G. Space geodetic monitoring of engineered structures: The ongoing destabilization of mosul dam, Iraq. Sci. Rep. 2016, 6, 37408. [Google Scholar] [CrossRef] [PubMed]
- Milillo, P.; Perissin, D.; Salzer, J.T.; Lundgren, P.; Lacava, G.; Milillo, G. Monitoring dam structural health from space: Insights from novel insar techniques and multi-parametric modeling applied to the pertusillo dam basilicata, Italy. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 221–229. [Google Scholar] [CrossRef]
- Lombardini, F.; Pardini, M. 3-D SAR Tomography: The Multibaseline Sector Interpolation Approach. IEEE Geosci. Remote Sens. Lett. 2008, 5, 630–634. [Google Scholar] [CrossRef]
- Zhu, X.X.; Bamler, R. Very High Resolution Spaceborne SAR Tomography in Urban Environment. IEEE Trans. Geosci. Remote Sens. 2010, 48, 4296–4308. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.X.; Yuanyuan, W.; Sina, M.; Nan, G. A Review of Ten-Year Advances of Multi-Baseline SAR Interferometry Using TerraSAR-X Data. Remote Sens. 2018, 10, 1374. [Google Scholar] [CrossRef]
- Reigber, A.; Moreira, A. First demonstration of airborne SAR tomography using multibaseline L-band data. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2142–2152. [Google Scholar] [CrossRef]
- Fornaro, G.; Serafino, F. Imaging of Single and Double Scatterers in Urban Areas via SAR Tomography. IEEE Trans. Geosci. Remote Sens. 2006, 44, 3497–3505. [Google Scholar] [CrossRef]
- Werninghaus, R.; Buckreuss, S. The TerraSAR-X Mission and System Design. IEEE Trans. Geosci. Remote Sens. 2010, 48, 606–614. [Google Scholar] [CrossRef] [Green Version]
- Covello, F.; Battazza, F.; Coletta, A.; Lopinto, E.; Fiorentino, C.; Pietranera, L. COSMO-SkyMed an existing opportunity for observing the Earth. J. Geodyn. 2010, 49, 171–180. [Google Scholar] [CrossRef] [Green Version]
- Tebaldini, S. Single and Multipolarimetric SAR Tomography of Forested Areas: A Parametric Approach. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2375–2387. [Google Scholar] [CrossRef]
- Tebaldini, S.; Rocca, F.; Guarnieri, A.M. Model Based SAR Tomography of Forested Areas. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Boston, MA, USA, 7–11 July 2008; pp. 593–596. [Google Scholar]
- Ferro-Famil, L.; Tebaldini, S.; Davy, M. Very high-resolution three-dimensional imaging of natural environments using a tomographic ground-based SAR system. In Proceedings of the European Conference on Antennas and Propagation (EuCAP), The Hague, The Netherlands, 6–11 April 2014; pp. 3221–3224. [Google Scholar]
- Ferro-Famil, L.; Leconte, C.; Boutet, F.; Phan, X.V.; Gay, M.; Durand, Y. PoSAR: A VHR tomographic GB-SAR system application to snow cover 3-D imaging at X and Ku bands. In Proceedings of the Radar Conference, Amsterdam, The Netherlands, 31 October–2 November 2012; pp. 130–133. [Google Scholar]
- Colesanti, C.; Ferretti, A.; Novali, F.; Prati, C.; Rocca, F. SAR monitoring of progressive and seasonal ground deformation using the permanent scatterers technique. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1685–1701. [Google Scholar] [CrossRef]
- Ferretti, A.; Bianchi, M.; Prati, C.; Rocca, F. Higher-Order Permanent Scatterers Analysis. EURASIP J. Appl. Signal Process. 2005, 2005, 3231–3242. [Google Scholar] [CrossRef] [Green Version]
- De Maio, A.; Fornaro, G.; Pauciullo, A. Detection of Single Scatterers in Multidimensional SAR Imaging. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2284–2297. [Google Scholar] [CrossRef]
- Pauciullo, A.; Reale, D.; De Maio, A.; Fornaro, G. Detection of Double Scatterers in SAR Tomography. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3567–3586. [Google Scholar] [CrossRef]
- Kumar, S. Atmosphere Effects Correction. Estimation and Correction of Tropospheric and Ionospheric Effects on Differential SAR Interferograms. Master’s Thesis, University of Twente, Enschede, The Netherlands, 2011. [Google Scholar]
- Dwyer, M.J.; Schmidt, G. The MODIS Reprojection Tool; Earth Science Satellite Remote Sensing; Springer: Berlin/Heidelberg, Germany, 2006; pp. 162–177. [Google Scholar]
- Lee, H.B.; Kim, Y. Assessment of GPS global ionosphere maps (GIM) by comparison between CODE GIM and TOPEX/Jason TEC data: Ionospheric perspective. J. Geophys. Res. Space Phys. 2010, 115. [Google Scholar] [CrossRef] [Green Version]
- Global Ionosphere Maps Produced by CODE. Available online: http://www.aiub.unibe.ch/content/research/gnss/code_research/igs/global_ionosphere_maps_produced_by_code/index_eng.html (accessed on 28 December 2018).
- Ferretti, A.; Prati, C.; Rocca, F. Permanent scatterers in SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 8–20. [Google Scholar] [CrossRef] [Green Version]
- Siddique, M.A.; Wegmüller, U.; Hajnsek, I.; Frey, O. Single-Look SAR Tomography as an Add-On to PSI for Improved Deformation Analysis in Urban Areas. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6119–6137. [Google Scholar] [CrossRef]
- Moreira, A.; Prats-Iraola, P.; Younis, M.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.P. A tutorial on synthetic aperture radar. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–43. [Google Scholar] [CrossRef] [Green Version]
- Crosetto, M.; Monserrat, O. Persistent Scatterer Interferometry: A review. ISPRS J. Photogramm. Remote Sens. 2016, 115, 78–89. [Google Scholar] [CrossRef] [Green Version]
- Ma, P.; Hui, L. Robust Detection of Single and Double Persistent Scatterers in Urban Built Environments. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2124–2139. [Google Scholar] [CrossRef]
- Jenq, Y.C. High-precision sinusoidal frequency estimator based on weighted least square method. IEEE Trans. Instrum. Meas. 1987, 36, 124–127. [Google Scholar] [CrossRef]
- Van Trees, H.L. Detection, Estimation, and Modulation Theory: Pt. 1.: Detection, Estimation, and Linear Modulation; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Fornaro, G.; Serafino, F.; Soldovieri, F. Three-dimensional focusing with multipass SAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 507–517. [Google Scholar] [CrossRef]
- Lombardini, F.; Montanari, M.; Gini, F. Reflectivity estimation for multibaseline interferometric radar imaging of layover extended sources. IEEE Trans. Signal Process. 2003, 51, 1508–1519. [Google Scholar] [CrossRef]
- Olivier, D.H.; Ronny, H.; Nicolas, W.; Olaf, H. Exploiting SAR Tomography for Supervised Land-Cover Classification. Remote Sens. 2018, 10, 1742. [Google Scholar]
- Noferini, L.; Pieraccini, M.; Mecatti, D.; Luzi, G.; Atzeni, C.; Tamburini, A. Permanent scatterers analysis for atmospheric correction in ground-based SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1459–1471. [Google Scholar] [CrossRef]
- Frey, O.; Hajnsek, I.; Wegmuller, U. Spaceborne SAR Tomography in Urban Areas. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium, Melbourne, Australia, 21–26 July 2013; pp. 69–72. [Google Scholar]
- Fornaro, G.; Lombardini, F.; Serafino, F. Three-dimensional multipass SAR focusing: Experiments with long-term spaceborne data. IEEE Trans. Geosci. Remote Sens. 2005, 43, 702–714. [Google Scholar] [CrossRef]
- Zhu, X.X.; Bamler, R. Tomographic SAR Inversion by L1-norm Regularization—The Compressive Sensing Approach. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3839–3846. [Google Scholar] [CrossRef]
- Fornaro, G.; Lombardini, F.; Pauciullo, A.; Reale, D.; Viviani, F. Tomographic Processing of Interferometric SAR Data: Developments, applications, and future research perspectives. IEEE Signal Process. Mag. 2014, 31, 41–50. [Google Scholar] [CrossRef]
- Zhu, X.X.; Bamler, R. Super-Resolution Power and Robustness of Compressive Sensing for Spectral Estimation with Application to Spaceborne Tomographic SAR. IEEE Trans. Geosci. Remote Sens. 2012, 50, 247–258. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Parameters | Value |
|---|---|
| Center slant range | 645.6 km |
| Orbit direction | Descending |
| Incidence angle | 39.48° |
| Carrier frequency | 9.65 GHz |
| Wavelength | 0.03 cm |
| Chirp bandwidth | 300 MHz |
| Azimuth resolution | 0.167 m |
| Range resolution | 0.454 m |
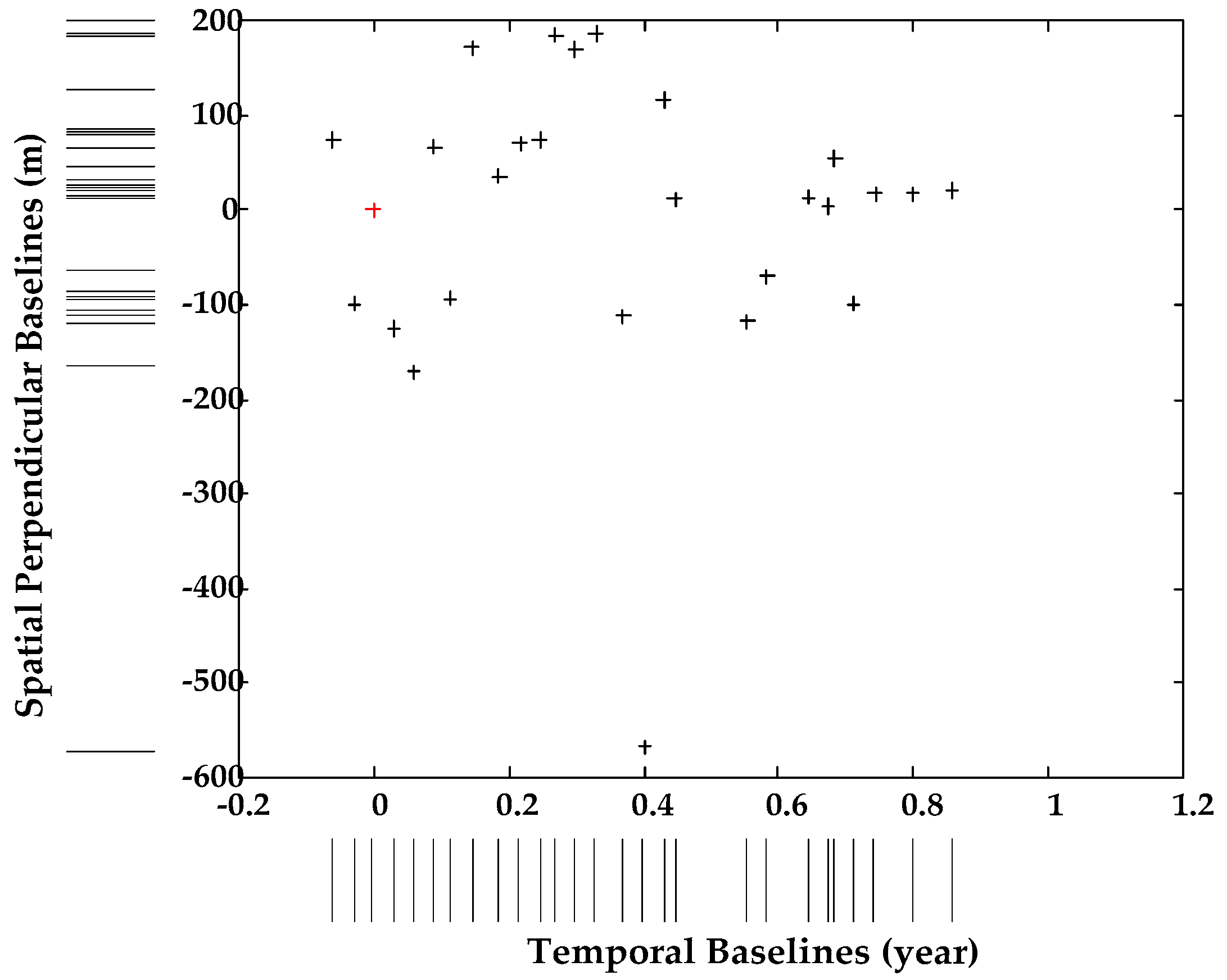
| Span of spatial Perpendicular baseline | 752.8 m |
| Largest Connected Network | Original | Expanded | Gain |
|---|---|---|---|
| Number of true SPSs | 4392 | 8808 | 4410 |
| Utilization rate | 43.59% | 87.36% | 43.77% |
| Estimator | WLS | ND-WLS |
|---|---|---|
| Computation time/s | 208.93 | 45.74 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, X.; Dong, Z.; Yu, A.; Wu, M.; Li, D.; Zhang, Y. New Approaches for Robust and Efficient Detection of Persistent Scatterers in SAR Tomography. Remote Sens. 2019, 11, 356. https://doi.org/10.3390/rs11030356
Zhu X, Dong Z, Yu A, Wu M, Li D, Zhang Y. New Approaches for Robust and Efficient Detection of Persistent Scatterers in SAR Tomography. Remote Sensing. 2019; 11(3):356. https://doi.org/10.3390/rs11030356
Chicago/Turabian StyleZhu, Xiaoxiang, Zhen Dong, Anxi Yu, Manqing Wu, Dexin Li, and Yongsheng Zhang. 2019. "New Approaches for Robust and Efficient Detection of Persistent Scatterers in SAR Tomography" Remote Sensing 11, no. 3: 356. https://doi.org/10.3390/rs11030356
APA StyleZhu, X., Dong, Z., Yu, A., Wu, M., Li, D., & Zhang, Y. (2019). New Approaches for Robust and Efficient Detection of Persistent Scatterers in SAR Tomography. Remote Sensing, 11(3), 356. https://doi.org/10.3390/rs11030356