Comparison of Satellite and UAV-Based Multispectral Imagery for Vineyard Variability Assessment

 ,
,  ,
,  and
and
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Satellite Time Series Images
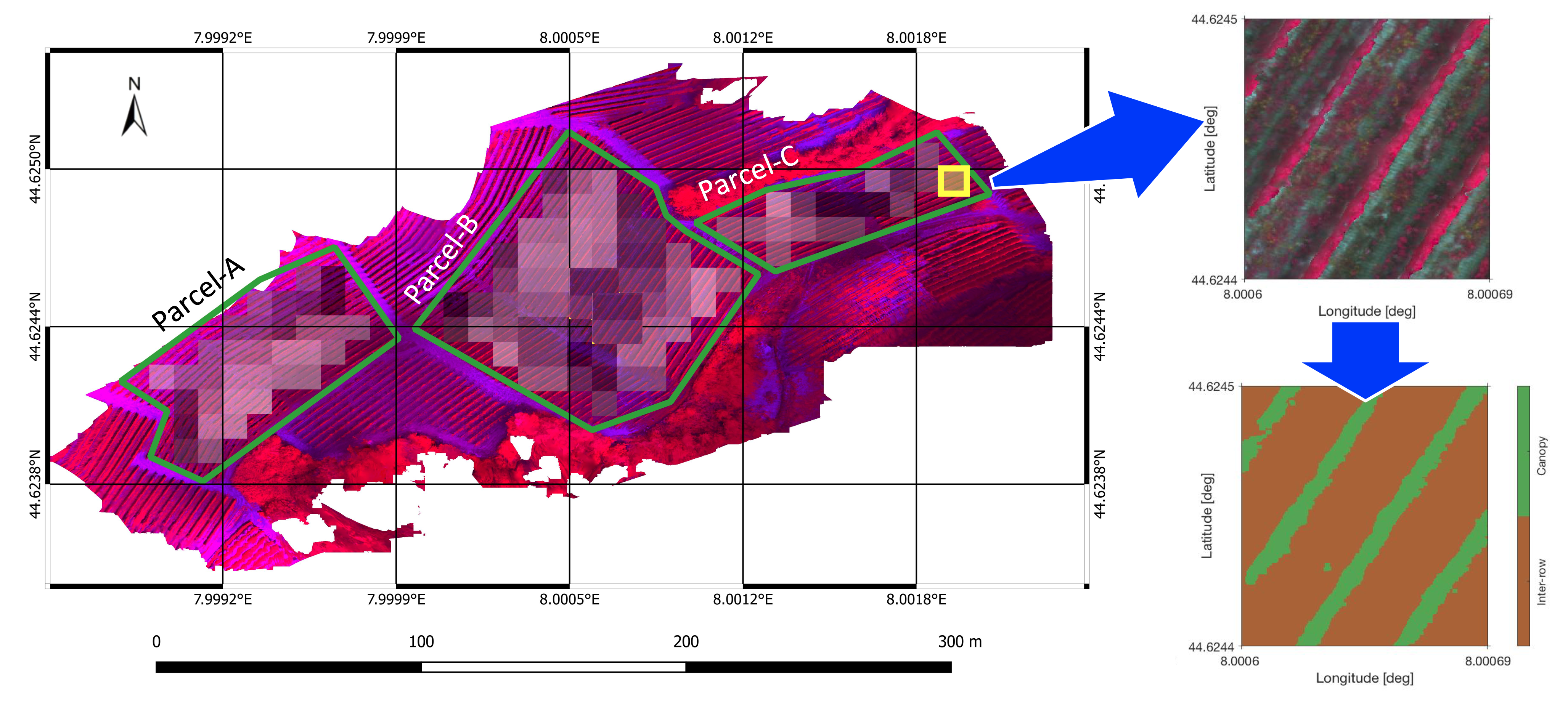
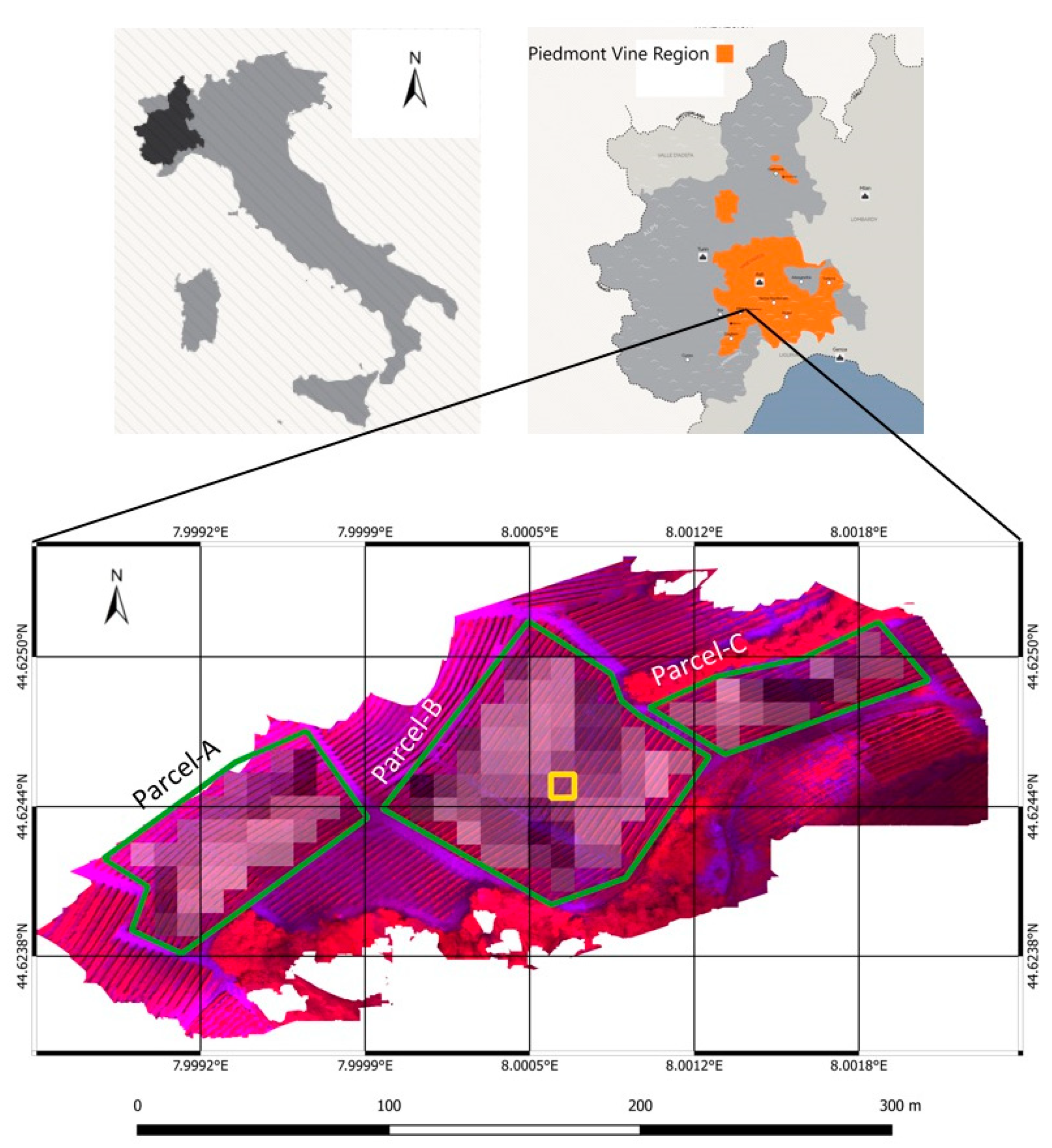
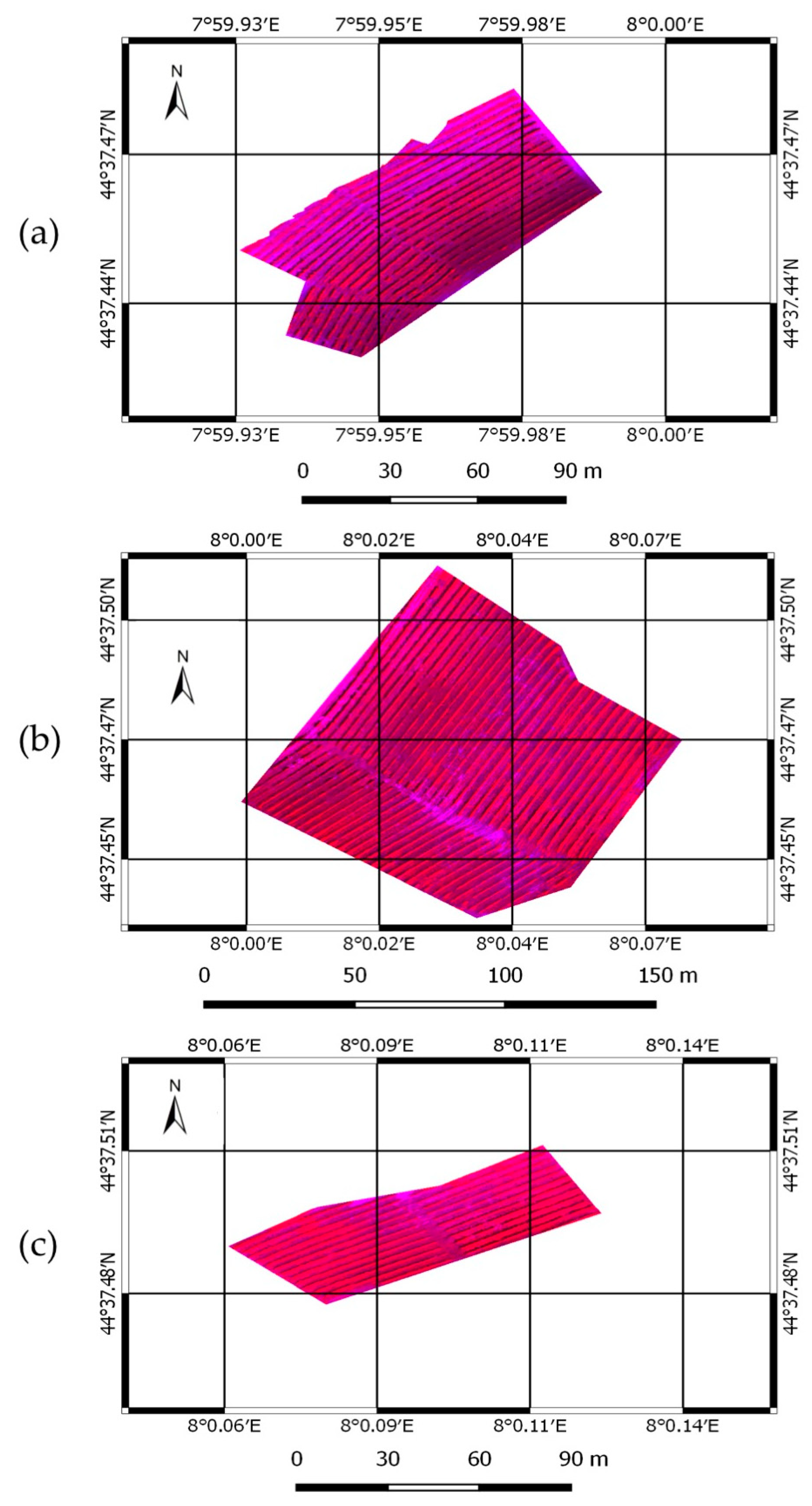
2.2. UAV-Based Imagery
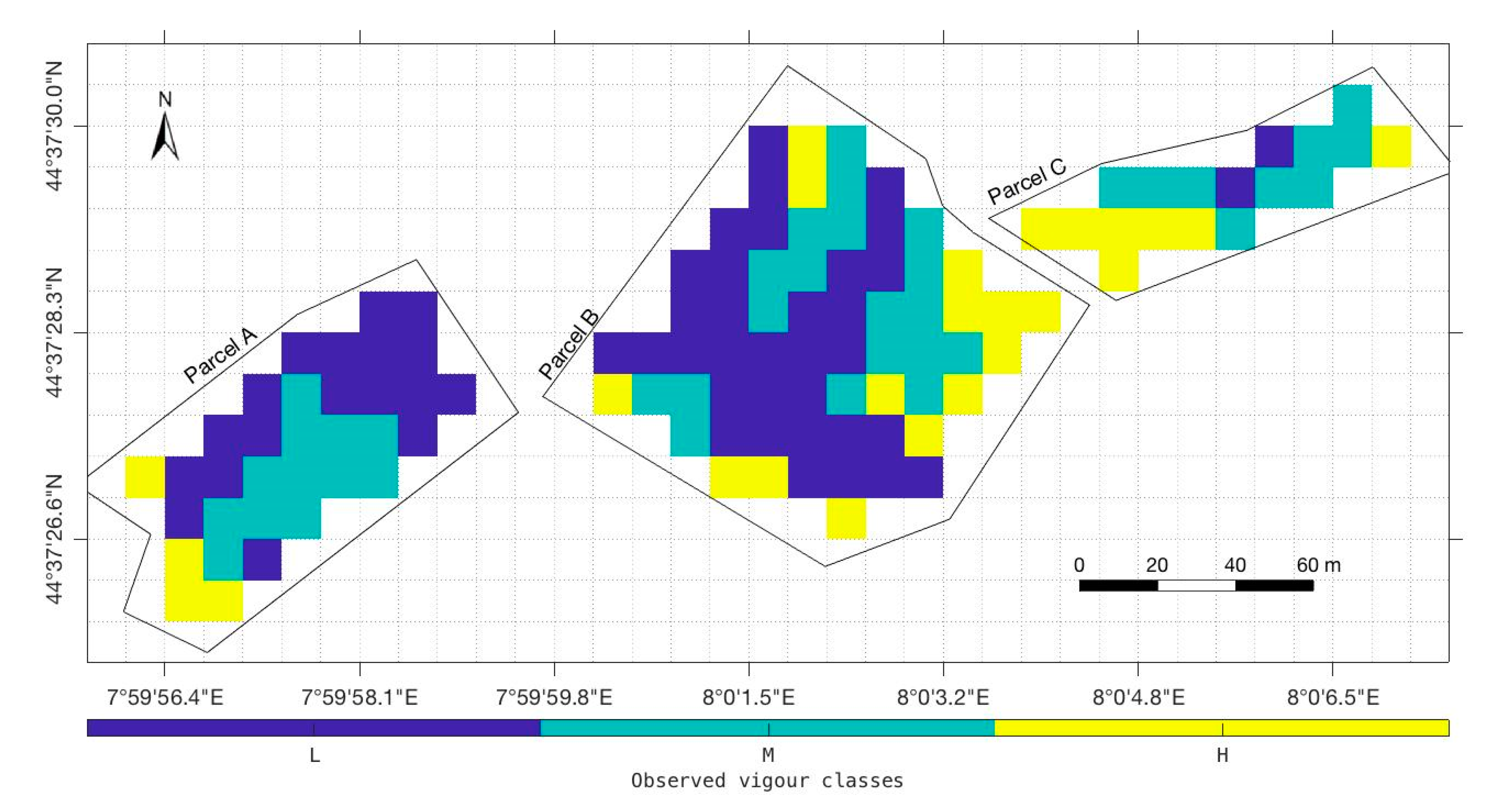
2.3. In-Field Vigour Assessment
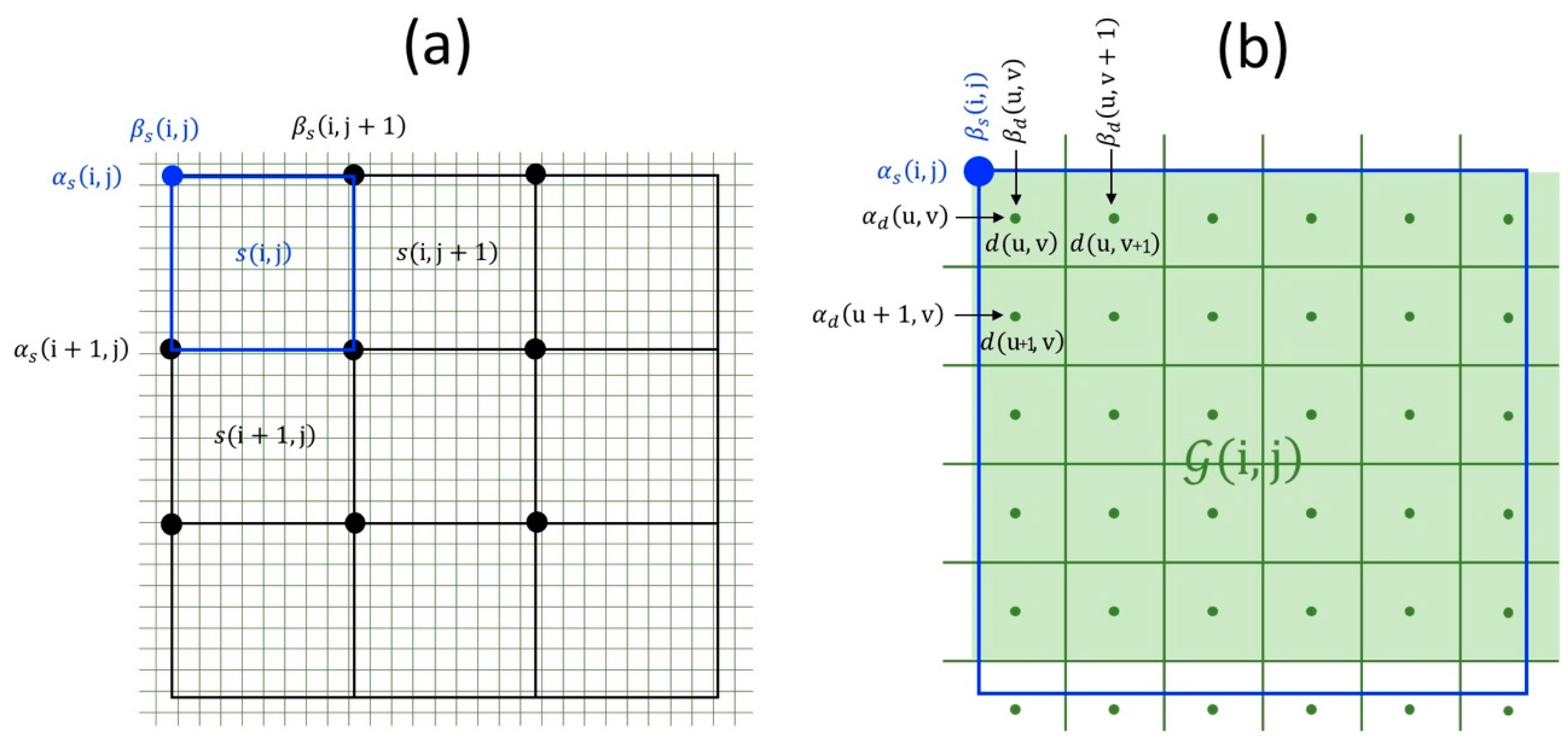
2.4. Data Processing
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| pixel in the row and column of the raster matrix | |
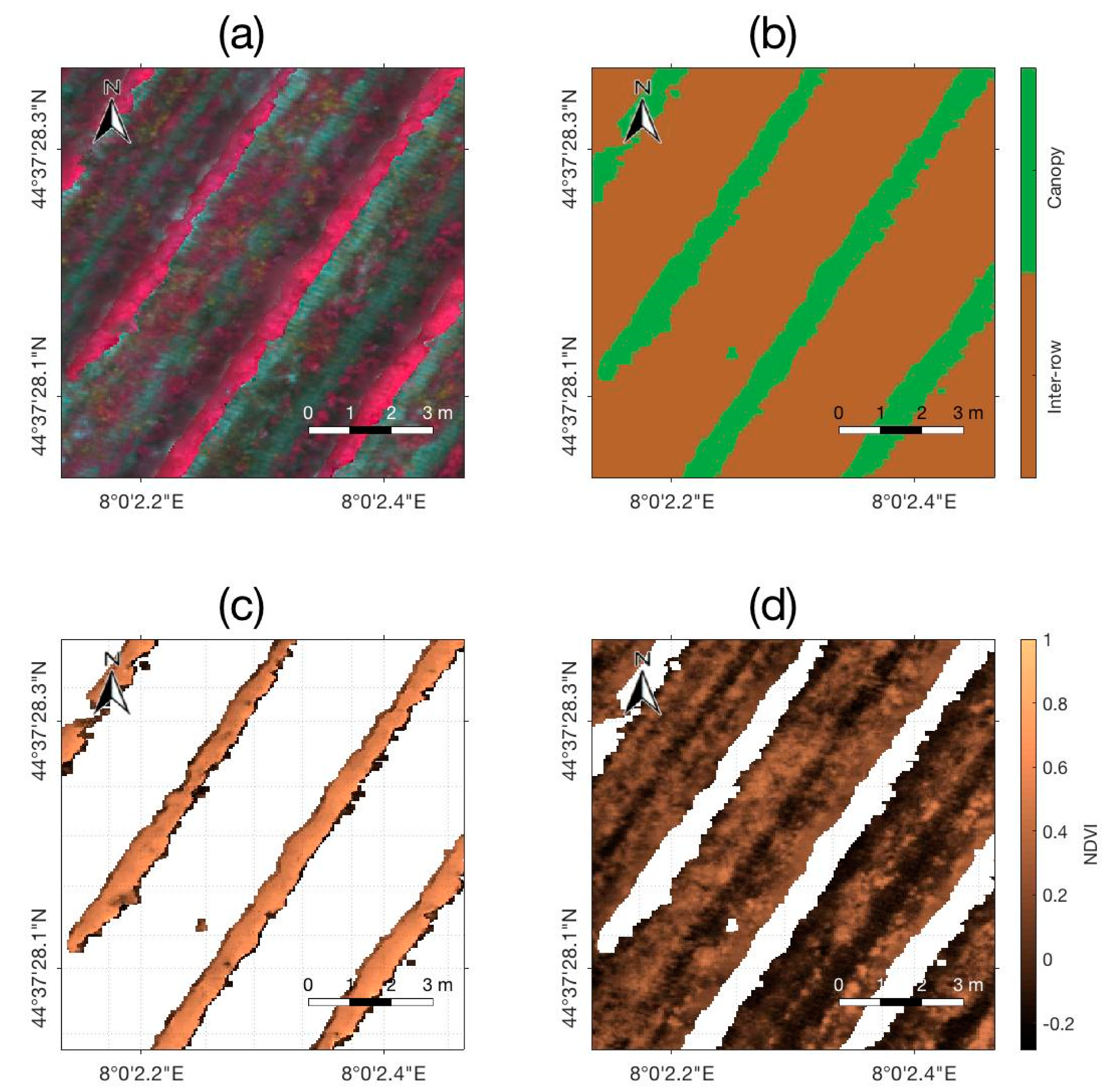
| High-resolution multispectral imagery from UAV platform | |
| Subset of UAV pixels representing the same area of satellite pixel | |
| Subset of UAV pixels representing only inter-row surfaces | |
| Subset of UAV pixels representing only vines canopy | |
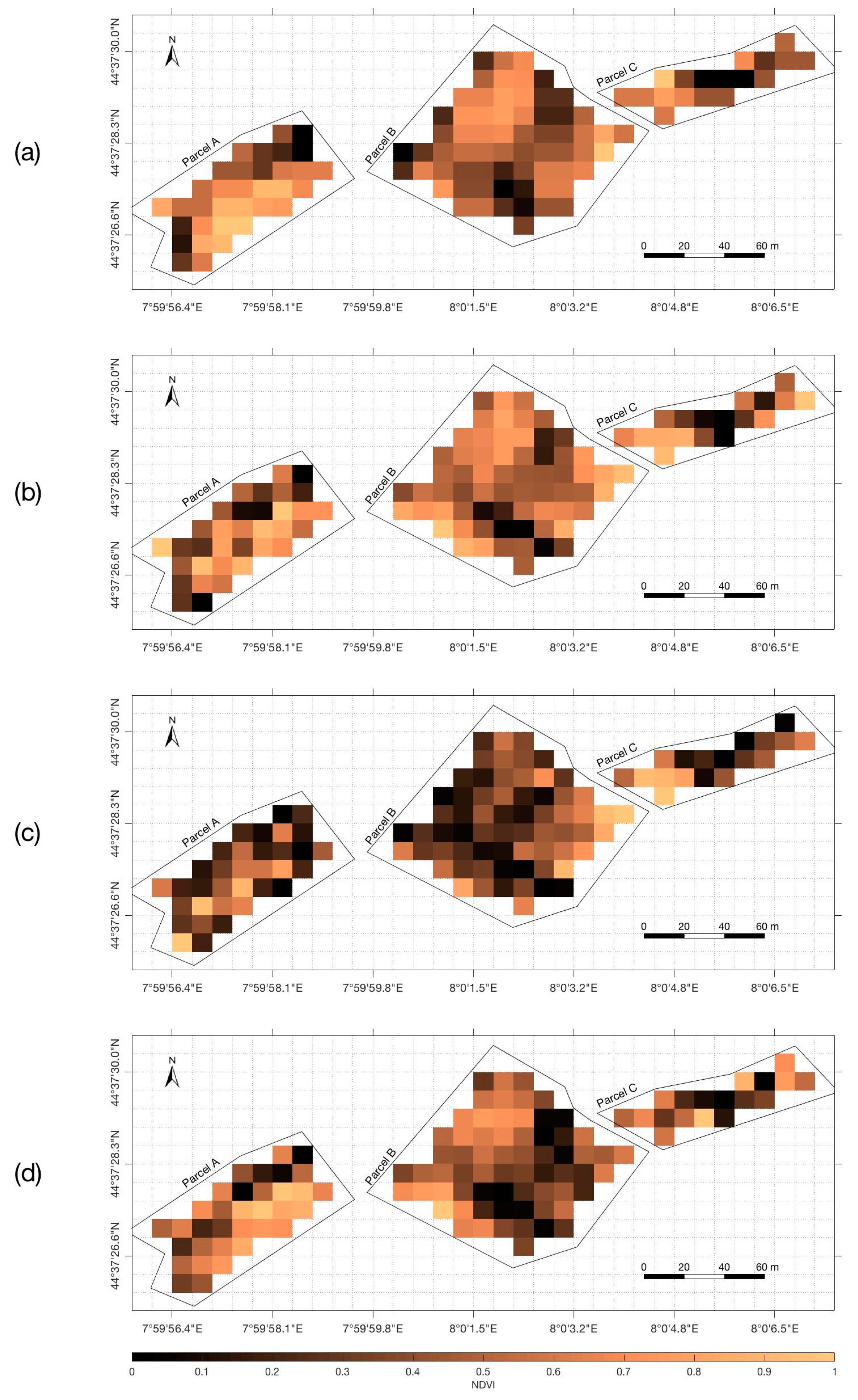
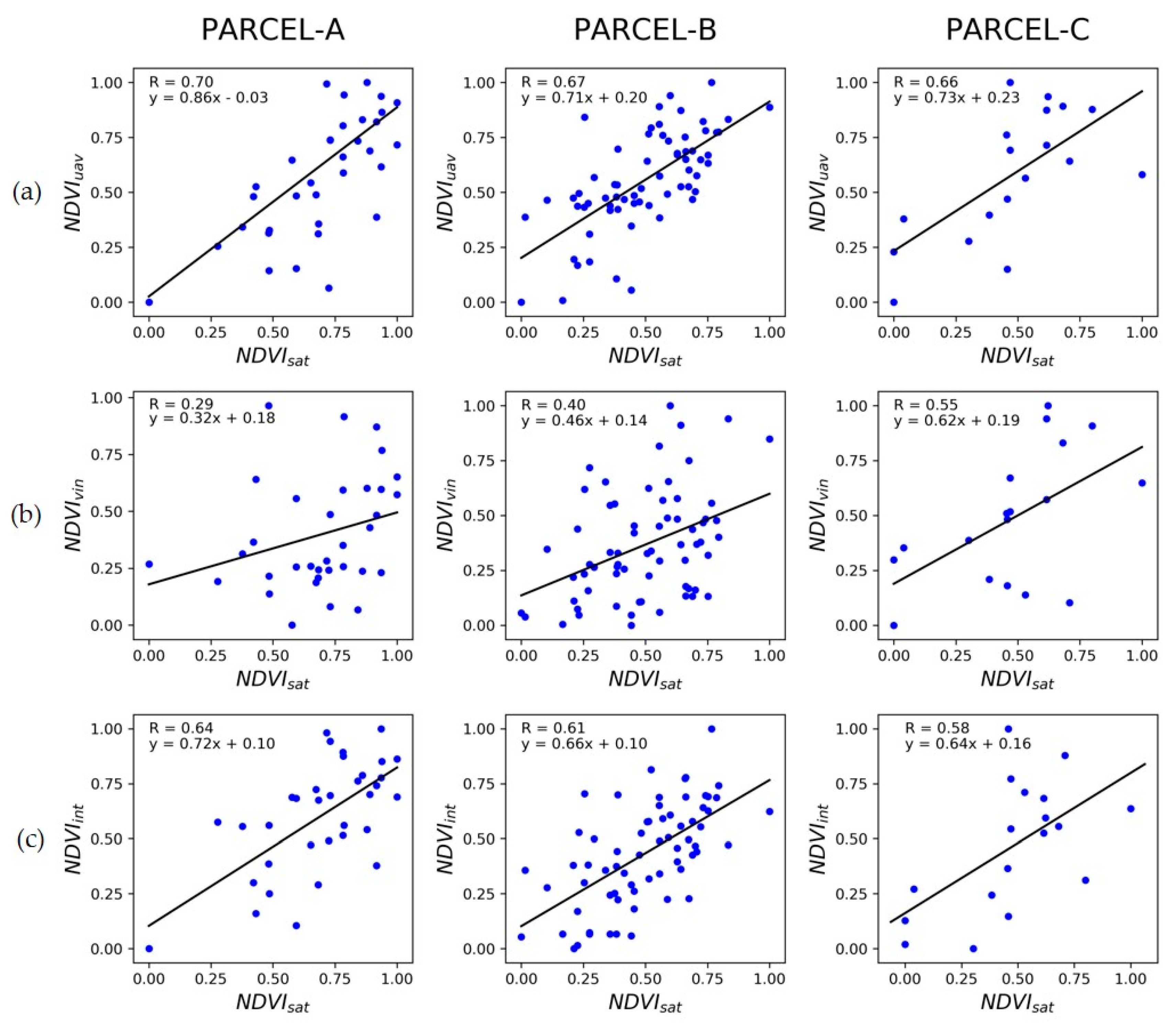
| NDVI computed using satellite imagery | |
| Comprehensive NDVI computed considering all the UAV pixels in | |
| NDVI computed considering only the UAV pixels representing vines canopy | |
| NDVI computed considering only the UAV pixels representing inter-row surface | |
| digital numbers in the near infrared band of pixel | |
| digital numbers in the red band of pixel | |
| digital numbers in the near infrared band of pixel | |
| digital numbers in the red band of pixel | |
| pixel in the row and column of the raster matrix | |
| Decametric resolution multispectral imagery from satellite platform | |
| latitude coordinate (expressed in WGS84) of pixel centre | |
| latitude coordinate (expressed in WGS84) of the upper left corner of pixel | |
| longitude coordinate (expressed in WGS84) of pixel centre | |
| longitude coordinate (expressed in WGS84) of the upper left corner of pixel |
References
- Pallottino, F.; Biocca, M.; Nardi, P.; Figorilli, S.; Menesatti, P.; Costa, C. Science mapping approach to analyse the research evolution on precision agriculture: World, EU and Italian situation. Precis. Agric. 2018, 19, 1011–1026. [Google Scholar] [CrossRef]
- Comba, L.; Gay, P.; Ricauda Aimonino, D. Robot ensembles for grafting herbaceous crops. Biosyst. Eng. 2016, 146, 227–239. [Google Scholar] [CrossRef]
- Arnó, J.; Martínez-Casasnovas, J.A.; Ribes-Dasi, M.; Rosell, J.R. Review. Precision Viticulture. Research topics, challenges and opportunities in site-specific vineyard management. Span. J. Agric. Res. 2009, 7, 779–790. [Google Scholar] [CrossRef]
- Silvestroni, O.; Lanari, V.; Lattanzi, T. Canopy management strategies to control yield and grape composition of Montepulciano grapevines. Aust. J. Grape Wine Res. 2018. [Google Scholar] [CrossRef]
- Bramley, R.G.V.; Hamilton, R.P. Understanding variability in winegrape production systems. Aust. J. Grape Wine Res. 2004, 10, 32–45. [Google Scholar] [CrossRef]
- Song, J.; Smart, R.E.; Dambergs, R.G.; Sparrow, A.M.; Wells, R.B.; Wang, H.; Qian, M.C. Pinot Noir wine composition from different vine vigour zones classified by remote imaging technology. Food Chem. 2014, 153, 52–59. [Google Scholar] [CrossRef] [PubMed]
- Primicerio, J.; Gay, P.; Ricauda Aimonino, D.; Comba, L.; Matese, A.; di Gennaro, S.F. NDVI-based vigour maps production using automatic detection of vine rows in ultra-high resolution aerial images. In Proceedings of the 10th European Conference on Precision Agriculture, Israel, 12 July–16 July 2015; pp. 465–470. [Google Scholar]
- Hall, A.; Lamb, D.W.; Holzapfel, B.; Louis, J. Optical remote sensing applications in viticulture—A review. Aust. J. Grape Wine Res. 2002, 8, 36–47. [Google Scholar] [CrossRef]
- Lanjeri, S.; Melia, J.; Segarra, D. A multi-temporal masking classification method for vineyard monitoring in central Spain. Int. J. Remote Sens. 2001, 22, 3167–3186. [Google Scholar] [CrossRef]
- Haboudane, D.; Miller, J.R.; Tremblay, N.; Zarco-Tejada, P.J.; Dextraze, L. Integrated narrowband vegetation indices for prediction of crop chlorophyll content for application to precision agriculture. Remote Sens. Environ. 2002, 81, 416–426. [Google Scholar] [CrossRef]
- Primicerio, J.; Caruso, G.; Comba, L.; Crisci, A.; Gay, P.; Guidoni, S.; Genesio, L.; Ricauda Aimonino, D.; Vaccari, F.P. Individual plant definition and missing plant characterization in vineyards from high-resolution UAV imagery. Eur. J. Remote Sens. 2017, 50, 179–186. [Google Scholar] [CrossRef] [Green Version]
- Jin, Z.; Prasad, R.; Shriver, J.; Zhuang, Q. Crop model- and satellite imagery-based recommendation tool for variable rate N fertilizer application for the US Corn system. Precis. Agric. 2017, 18, 779–800. [Google Scholar] [CrossRef]
- Magney, T.S.; Eitel, J.U.H.; Vierling, L.A. Mapping wheat nitrogen uptake from RapidEye vegetation indices. Precis. Agric. 2017, 18, 429–451. [Google Scholar] [CrossRef]
- Bramley, R.; Proffitt, A.P.B. Managing variability in viticultural production. Grapegrow. Winemak. 1999, 427, 11–16. [Google Scholar]
- Urretavizcaya, I.; Royo, J.B.; Miranda, C.; Tisseyre, B.; Guillaume, S.; Santesteban, L.G. Relevance of sink-size estimation for within-field zone delineation in vineyards. Precis. Agric. 2017, 18, 133–144. [Google Scholar] [CrossRef]
- Enenkel, M.; Farah, C.; Hain, C.; White, A.; Anderson, M.; You, L.; Wagner, W.; Osgood, D. What rainfall does not tell us—enhancing financial instruments with satellite-derived soil moisture and evaporative stress. Remote Sens. 2018, 10, 1819. [Google Scholar] [CrossRef]
- Romero, M.; Luo, Y.; Su, B.; Fuentes, S. Vineyard water status estimation using multispectral imagery from an UAV platform and machine learning algorithms for irrigation scheduling management. Comput. Electron. Agric. 2018, 147, 109–117. [Google Scholar] [CrossRef]
- Georgi, C.; Spengler, D.; Itzerott, S.; Kleinschmit, B. Automatic delineation algorithm for site-specific management zones based on satellite remote sensing data. Precis. Agric. 2018, 19, 684–707. [Google Scholar] [CrossRef]
- Jain, M.; Mondal, P.; Galford, G.L.; Fiske, G.; DeFries, R.S. An automated approach to map winter cropped area of smallholder farms across large scales using MODIS imagery. Remote Sens. 2017, 9, 566. [Google Scholar] [CrossRef]
- Comba, L.; Biglia, A.; Ricauda Aimonino, D.; Gay, P. Unsupervised detection of vineyards by 3D point-cloud UAV photogrammetry for precision agriculture. Comput. Electron. Agric. 2018, 155, 84–95. [Google Scholar] [CrossRef]
- Fuentes, S.; Poblete-Echeverría, C.; Ortega-Farias, S.; Tyerman, S.; De Bei, R. Automated estimation of leaf area index from grapevine canopies using cover photography, video and computational analysis methods: New automated canopy vigour monitoring tool. Aust. J. Grape Wine Res. 2014, 20, 465–473. [Google Scholar] [CrossRef]
- Dobrowski, S.Z.; Ustin, S.L.; Wolpert, J.A. Remote estimation of vine canopy density in vertically shoot-positioned vineyards: Determining optimal vegetation indices. Aust. J. Grape Wine Res. 2002, 8, 117–125. [Google Scholar] [CrossRef]
- Sun, L.; Gao, F.; Anderson, M.C.; Kustas, W.P.; Alsina, M.M.; Sanchez, L.; Sams, B.; McKee, L.; Dulaney, W.; White, W.A.; et al. Daily mapping of 30 m LAI and NDVI for grape yield prediction in California vineyards. Remote Sens. 2017, 9, 317. [Google Scholar] [CrossRef]
- Johnson, L.F. Temporal stability of an NDVI-LAI relationship in a Napa Valley vineyard. Aust. J. Grape Wine Res. 2003, 9, 96–101. [Google Scholar] [CrossRef] [Green Version]
- Johnson, L.F.; Bosch, D.F.; Williams, D.C.; Lobitz, B.M. Remote sensing of vineyard management zones: Implications for wine quality. Appl. Eng. Agric. 2001, 17, 557–560. [Google Scholar] [CrossRef]
- Pôças, I.; Paço, T.A.; Cunha, M.; Andrade, J.A.; Silvestre, J.; Sousa, A.; Santos, F.L.; Pereira, L.S.; Allen, R.G. Satellite-based evapotranspiration of a super-intensive olive orchard: Application of METRIC algorithms. Biosyst. Eng. 2014, 128, 69–81. [Google Scholar] [CrossRef]
- He, M.; Kimball, J.S.; Maneta, M.P.; Maxwell, B.D.; Moreno, A.; Beguería, S.; Wu, X. Regional crop gross primary productivity and yield estimation using fused landsat-MODIS data. Remote Sens. 2018, 10, 372. [Google Scholar] [CrossRef]
- Robinson, N.P.; Allred, B.W.; Jones, M.O.; Moreno, A.; Kimball, J.S.; Naugle, D.E.; Erickson, T.A.; Richardson, A.D. A dynamic landsat derived normalized difference vegetation index (NDVI) product for the conterminous United States. Remote Sens. 2017, 9, 863. [Google Scholar] [CrossRef]
- Yang, M.-D.; Chen, S.-C.; Tsai, H.P. A long-term vegetation recovery estimation for Mt. Jou-Jou using multi-date SPOT 1, 2, and 4 images. Remote Sens. 2017, 9, 893. [Google Scholar] [CrossRef]
- Simms, É.L.; Ward, H. Multisensor NDVI-Based Monitoring of the Tundra-Taiga Interface (Mealy Mountains, Labrador, Canada). Remote Sens. 2013, 5, 1066–1090. [Google Scholar] [CrossRef] [Green Version]
- Semmens, K.A.; Anderson, M.C.; Kustas, W.P.; Gao, F.; Alfieri, J.G.; McKee, L.; Prueger, J.H.; Hain, C.R.; Cammalleri, C.; Yang, Y.; et al. Monitoring daily evapotranspiration over two California vineyards using Landsat 8 in a multi-sensor data fusion approach. Remote Sens. Environ. 2016, 185, 155–170. [Google Scholar] [CrossRef] [Green Version]
- Johnson, L.F.; Roczen, D.E.; Youkhana, S.K.; Nemani, R.R.; Bosch, D.F. Mapping vineyard leaf area with multispectral satellite imagery. Comput. Electron. Agric. 2003, 38, 33–44. [Google Scholar] [CrossRef]
- Senitnel-2A Processing Baseline (02.04). Available online: https://sentinel.esa.int/web/sentinel/missions/sentinel-2/news/-/article/new-processing-baseline-02-04-for-sentinel-2a-products (accessed on 11 January 2019).
- Chemura, A.; Mutanga, O.; Dube, T. Separability of coffee leaf rust infection levels with machine learning methods at Sentinel-2 MSI spectral resolutions. Precis. Agric. 2017, 18, 859–881. [Google Scholar] [CrossRef]
- Veloso, A.; Mermoz, S.; Bouvet, A.; Le Toan, T.; Planells, M.; Dejoux, J.-F.; Ceschia, E. Understanding the temporal behavior of crops using Sentinel-1 and Sentinel-2-like data for agricultural applications. Remote Sens. Environ. 2017, 199, 415–426. [Google Scholar] [CrossRef]
- Borgogno-Mondino, E.; Lessio, A.; Tarricone, L.; Novello, V.; de Palma, L. A comparison between multispectral aerial and satellite imagery in precision viticulture. Precis. Agric. 2018, 19, 195. [Google Scholar] [CrossRef]
- Senthilnath, J.; Kandukuri, M.; Dokania, A.; Ramesh, K.N. Application of UAV imaging platform for vegetation analysis based on spectral-spatial methods. Comput. Electron. Agric. 2017, 140, 8–24. [Google Scholar] [CrossRef]
- Peña, J.M.; Torres-Sánchez, J.; de Castro, A.I.; Kelly, M.; López-Granados, F. Weed mapping in early-season maize fields using object-based analysis of unmanned aerial vehicle (UAV) images. PLoS ONE 2013, 8, e77151. [Google Scholar] [CrossRef] [PubMed]
- Pérez-Ortiz, M.; Peña, J.M.; Gutiérrez, P.A.; Torres-Sánchez, J.; Hervás-Martínez, C.; López-Granados, F. A semi-supervised system for weed mapping in sunflower crops using unmanned aerial vehicles and a crop row detection method. Appl. Soft. Comput. 2015, 37, 533–544. [Google Scholar] [CrossRef] [Green Version]
- Jay, S.; Baret, F.; Dutartre, D.; Malatesta, G.; Héno, S.; Comar, A.; Weiss, M.; Maupas, F. Exploiting the centimeter resolution of UAV multispectral imagery to improve remote-sensing estimates of canopy structure and biochemistry in sugar beet crops. Remote Sens. Environ 2018. In Press. [Google Scholar] [CrossRef]
- López-Granados, F.; Torres-Sánchez, J.; Serrano-Pérez, A.; de Castro, A.I.; Mesas-Carrascosa, Fco.-J.; Peña, J.M. Early season weed mapping in sunflower using UAV technology: Variability of herbicide treatment maps against weed thresholds. Precis. Agric. 2016, 17, 183–199. [Google Scholar] [CrossRef]
- Comba, L.; Gay, P.; Primicerio, J.; Ricauda Aimonino, D. Vineyard detection from unmanned aerial systems images. Comput. Electron. Agric. 2015, 114, 78–87. [Google Scholar] [CrossRef]
- Louargant, M.; Jones, G.; Faroux, R.; Paoli, J.-N.; Maillot, T.; Gée, C.; Villette, S. Unsupervised classification algorithm for early weed detection in row-crops by combining spatial and spectral information. Remote Sens. 2018, 10, 761. [Google Scholar] [CrossRef]
- Jin, X.; Liu, S.; Baret, F.; Hemerlé, M.; Comar, A. Estimates of plant density of wheat crops at emergence from very low altitude UAV imagery. Remote Sens. Environ. 2017, 198, 105–114. [Google Scholar] [CrossRef]
- Hall, A.; Louis, J.; Lamb, D.W. A method for extracting detailed information from high resolution multispectral images of vineyards. CiteSeerx 10M 2001. [Google Scholar]
- Reza, M.N.; Na, I.S.; Baek, S.W.; Lee, K.-H. Rice yield estimation based on K-means clustering with graph-cut segmentation using low-altitude UAV images. Biosyst. Eng. 2018, 177, 109–121. [Google Scholar] [CrossRef]
- Albetis, J.; Duthoit, S.; Guttler, F.; Jacquin, A.; Goulard, M.; Poilvé, H.; Féret, J.-B.; Dedieu, G. Detection of Flavescence dorée grapevine disease using unmanned aerial vehicle (UAV) multispectral imagery. Remote Sens. 2017, 9, 308. [Google Scholar] [CrossRef]
- Ducati, J.R.; Bombassaro, M.G.; Fachel, J.M.G. Classifying vineyards from satellite images: A case study on burgundy’s côte d’or. Oeno One 2014, 48, 247–260. [Google Scholar] [CrossRef]
- Meier, U. Growth Stages of Mono- and Dicotyledonous Plants; BBCH Monograph: Berlin, Germany, 1997. [Google Scholar]
- Copernicus Open Access Hub. Available online: https://scihub.copernicus.eu/dhus/#/home (accessed on 11 January 2019).
- Richter, R.; Wang, X.; Bachmann, M.; Schläpfer, D. Correction of cirrus effects in Sentinel-2 type of imagery. Int. J. Remote Sens. 2011, 32, 2931–2941. [Google Scholar] [CrossRef]
- Louis, J.; Charantonis, A.; Berthelot, B. Cloud Detection for Sentinel-2. In Proceedings of the ESA Living Planet Symposium, Bergen, Norway, 28 June–2 July 2010. [Google Scholar]
- Kaufman, Y.; Sendra, C. Algorithm for automatic atmospheric corrections to visibleand near-IR satellite imagery. Int. J. Remote Sens. 1988, 9, 1357–1381. [Google Scholar] [CrossRef]
- Schläpfer, D.; Borel, C.C.; Keller, J.; Itten, K.I. Atmospheric precorrected differential absorption technique to retrieve columnar water vapour. Remote Sens. Environ. 1998, 65, 353–366. [Google Scholar] [CrossRef]
- EESA Earth Online. Available online: https://earth.esa.int/documents/247904/685211/Sentinel-2_User_Handbook (accessed on 25 November 2017).
- Agisoft©. Available online: https://www.agisoft.com (accessed on 11 January 2019).
- Parrot Drones©. Available online: https://www.parrot.com/business-solutions-us/agriculture#agriculture (accessed on 11 January 2019).
- MicaSense. Available online: https://www.micasense.com/accessories/#!/Calibrated-Reflectance-Panel (accessed on 11 January 2019).
- Tagarakis, A.; Liakos, V.; Fountas, S.; Koundouras, S.; Gemtos, T.A. Management zones delineation using fuzzy clustering techniques in grapevines. Precis. Agric. 2013, 14, 18–39. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | UAV | |||
|---|---|---|---|---|
| Platform | Sentinel-2 | 8-rotors custom UAV | ||
| Sensors |  Multispectral Imager |  Parrot sequoia Multispectral camera | ||
| Number of channels | 13 | 4 | ||
| Band name | Range | Band name | Range | |
| Spectral band details | B4-Red B8-NIR | 650–680 nm 785–900 nm | B2-Red B4-NIR | 640–680 nm 770–810 nm |
| GSD per band | B4, B8 = 10 m | 5 cm | ||
| Flight altitude | 786 km | 35 m | ||
| Field of view | 290 km | 70.6° HFOV | ||
| Image Ground Dimension | 100 km × 100 km | 64 m × 48 m | ||
| Number of images to cover vineyards test site | 1 | >1000 | ||
| Dataset Name | Acquisition Date | Data Source | Time Difference (days) |
|---|---|---|---|
| 5 May 2017 | UAV | ||
| 30 April 2017 | Satellite | ||
| 29 June 2017 | UAV | ||
| 6 July 2017 | Satellite | ||
| 1 August 2017 | UAV | ||
| 5 August 2017 | Satellite | ||
| 13 September 2017 | UAV | ||
| 17 September 2017 | Satellite |
| Map pair | ||||||||||||
| Parcel A | 0.63 | 0.71 | 0.58 | 0.55 | 0.31 | 0.33 | 0.45 | 0.40 | 0.52 | 0.65 | 0.56 | 0.49 |
| Parcel B | 0.60 | 0.68 | 0.62 | 0.65 | 0.39 | 0.40 | 0.37 | 0.38 | 0.56 | 0.61 | 0.60 | 0.62 |
| Parcel C | 0.64 | 0.67 | 0.60 | 0.72 | 0.41 | 0.61 | 0.28 | 0.51 | 0.59 | 0.67 | 0.54 | 0.66 |
| Source | DF | SS | MS | F-Value | P-Value | |
|---|---|---|---|---|---|---|
| Parcel A | classes | 2 | 1.360807 | 0.680403 | 30.092543 | 5.461188 × 10−8 |
| Error | 31 | 0.700921 | 0.022610 | |||
| Total | 33 | 2.061721 | ||||
| Parcel B | classes | 2 | 2.713501 | 1.356750 | 71.166427 | 6.867305 × 10−7 |
| Error | 63 | 1.201062 | 0.019064 | |||
| Total | 65 | 3.914563 | ||||
| Parcel C | classes | 2 | 0.867121 | 0.433560 | 9.199357 | 0.00247 |
| Error | 15 | 0.706941 | 0.047129 | |||
| Total | 17 | 1.57406 |
| Source | DF | SS | MS | F-Value | P-Value | |
|---|---|---|---|---|---|---|
| Parcel A | classes | 2 | 0.308368 | 0.154184 | 3.458293 | 0.044081 |
| Error | 31 | 1.382101 | 0.044584 | |||
| Total | 33 | 1.690464 | ||||
| Parcel B | classes | 2 | 0.393805 | 0.196903 | 4.892817 | 0.010587 |
| Error | 63 | 2.535323 | 0.040243 | |||
| Total | 65 | 2.929128 | ||||
| Parcel C | classes | 2 | 0.198502 | 0.099251 | 1.455564 | 0.264401 |
| Error | 15 | 1.022811 | 0.068187 | |||
| Total | 17 | 1.221313 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khaliq, A.; Comba, L.; Biglia, A.; Ricauda Aimonino, D.; Chiaberge, M.; Gay, P. Comparison of Satellite and UAV-Based Multispectral Imagery for Vineyard Variability Assessment. Remote Sens. 2019, 11, 436. https://doi.org/10.3390/rs11040436
Khaliq A, Comba L, Biglia A, Ricauda Aimonino D, Chiaberge M, Gay P. Comparison of Satellite and UAV-Based Multispectral Imagery for Vineyard Variability Assessment. Remote Sensing. 2019; 11(4):436. https://doi.org/10.3390/rs11040436
Chicago/Turabian StyleKhaliq, Aleem, Lorenzo Comba, Alessandro Biglia, Davide Ricauda Aimonino, Marcello Chiaberge, and Paolo Gay. 2019. "Comparison of Satellite and UAV-Based Multispectral Imagery for Vineyard Variability Assessment" Remote Sensing 11, no. 4: 436. https://doi.org/10.3390/rs11040436
APA StyleKhaliq, A., Comba, L., Biglia, A., Ricauda Aimonino, D., Chiaberge, M., & Gay, P. (2019). Comparison of Satellite and UAV-Based Multispectral Imagery for Vineyard Variability Assessment. Remote Sensing, 11(4), 436. https://doi.org/10.3390/rs11040436