Rock Location and Quantitative Analysis of Regolith at the Chang’e 3 Landing Site Based on Local Similarity Constraint



Abstract
:1. Introduction
2. Materials and Methods
2.1. LPR Data Processing
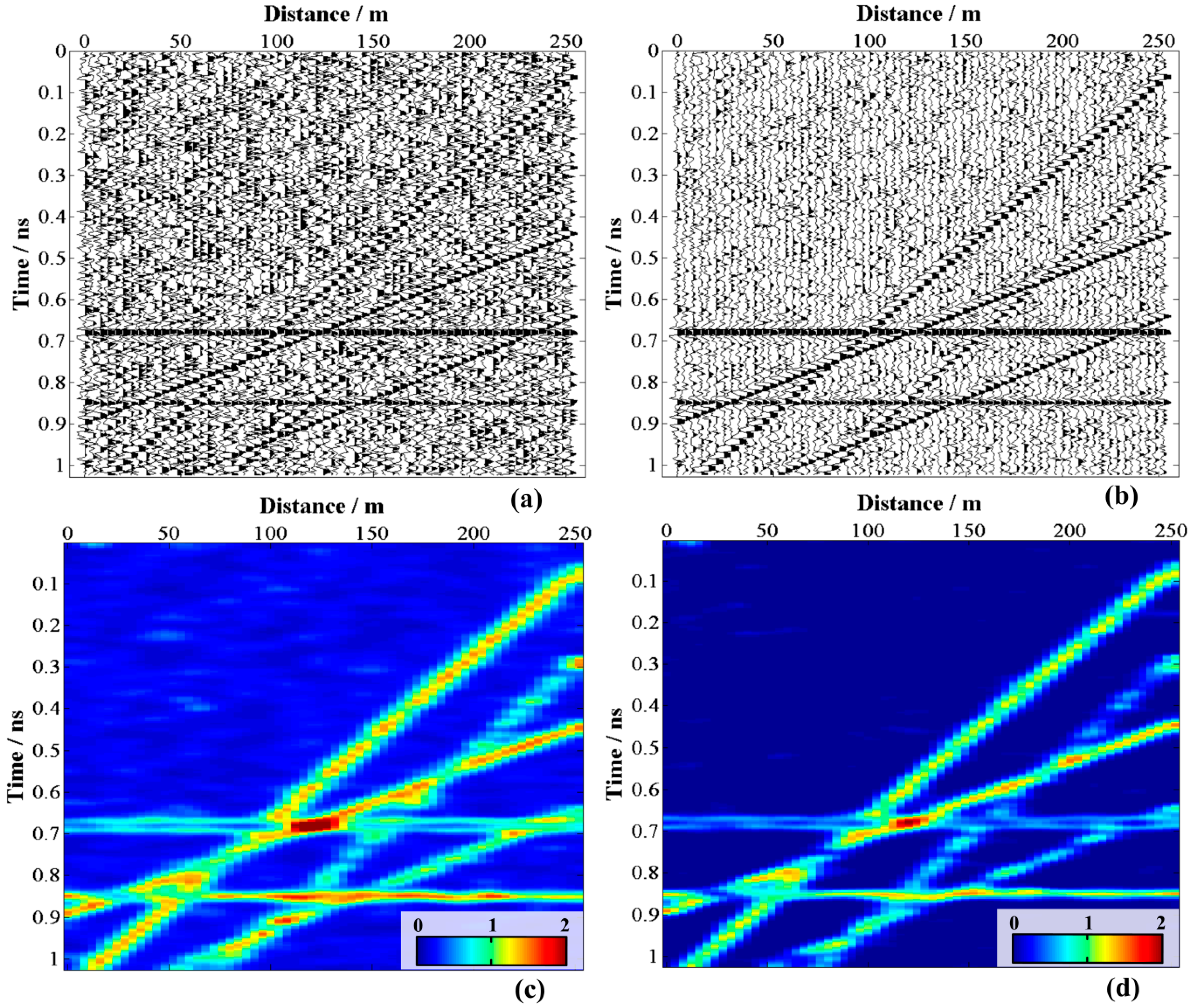
2.2. An f-x Domain EMD-Based Dip Filter
- (1)
- Set the size of the time window.
- (2)
- Pick a time window and adopt 1D forward Fourier transform along the time direction.
- (3)
- Pick a frequency slice and separate it into real and imaginary parts.
- (4)
- Compute IMF1s for real and imaginary parts to obtain the filtered parts.
- (5)
- Compose the filtered frequency slice.
- (6)
- Repeat (4)–(5) for each frequency slice.
- (7)
- Adopt 1D reverse Fourier transform along the time direction.
- (8)
- Repeat (2)–(7) for each time window.
2.3. Rock Extraction Based on Local Similarity Constraint
- (1)
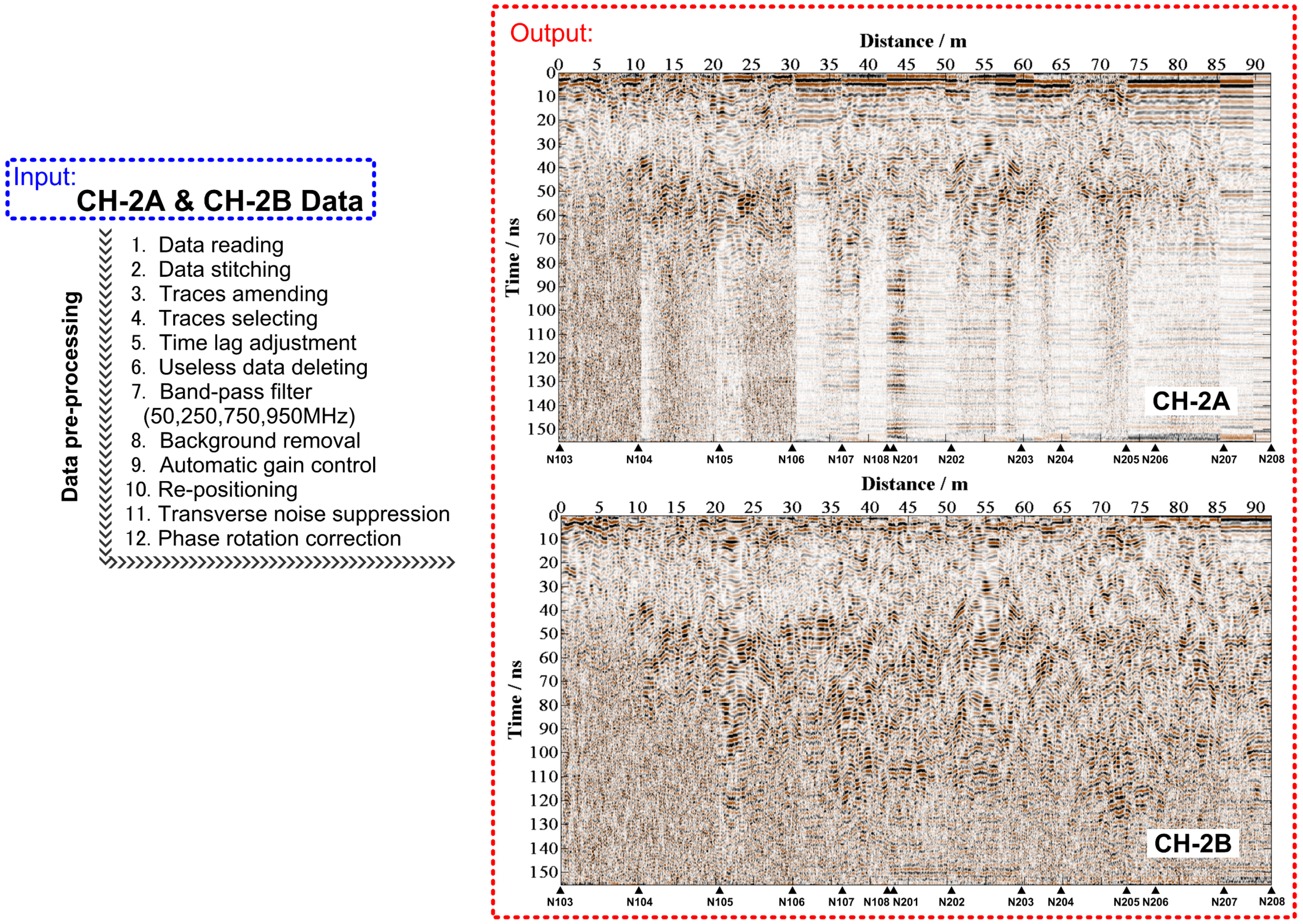
- For LPR CH-2A and B data
- (a)
- Apply a preprocessing line.
- (b)
- Attenuate steep-dip components by an f-x EMD-based low-pass dip filter.
- (2)
- Calculate local similarity spectrum between LPR CH-2A and B data.
- (3)
- Utilize a soft threshold function for the local similarity spectrum.
- (4)
- Mute the reflection area.
- (5)
- Pick the local maximum and record the corresponding space coordinates.
3. Results
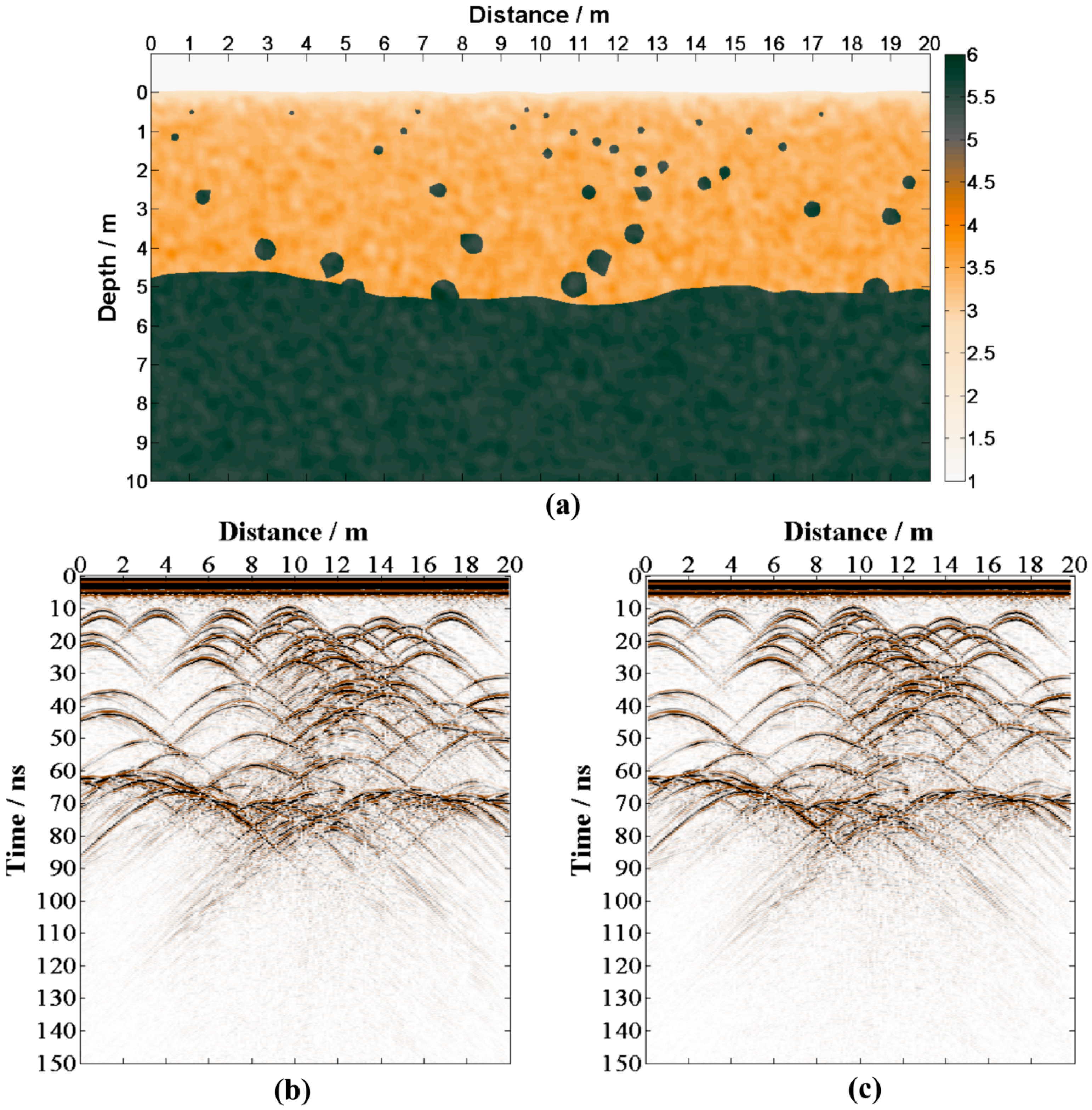
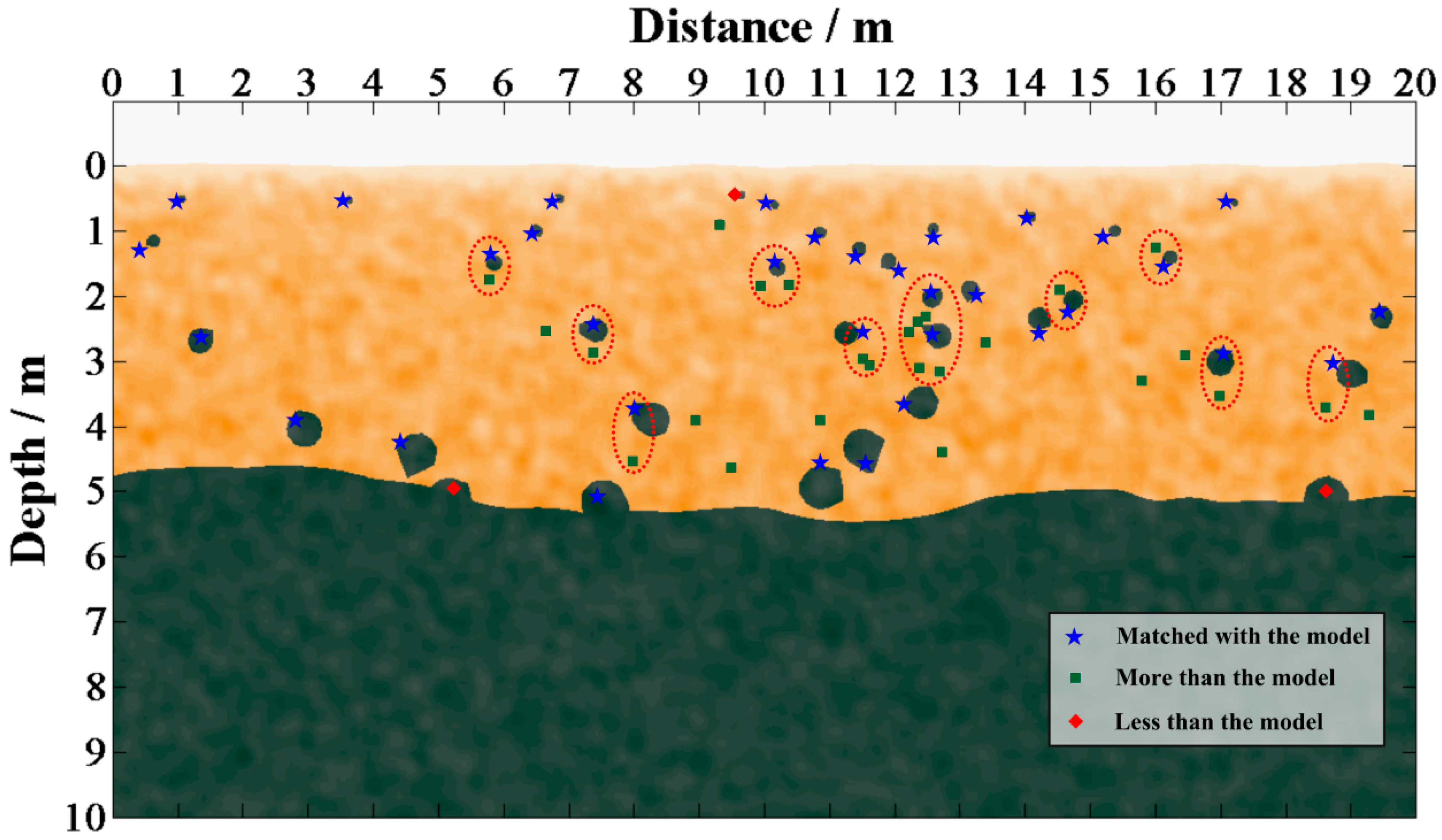
3.1. Verification of Simulation Result
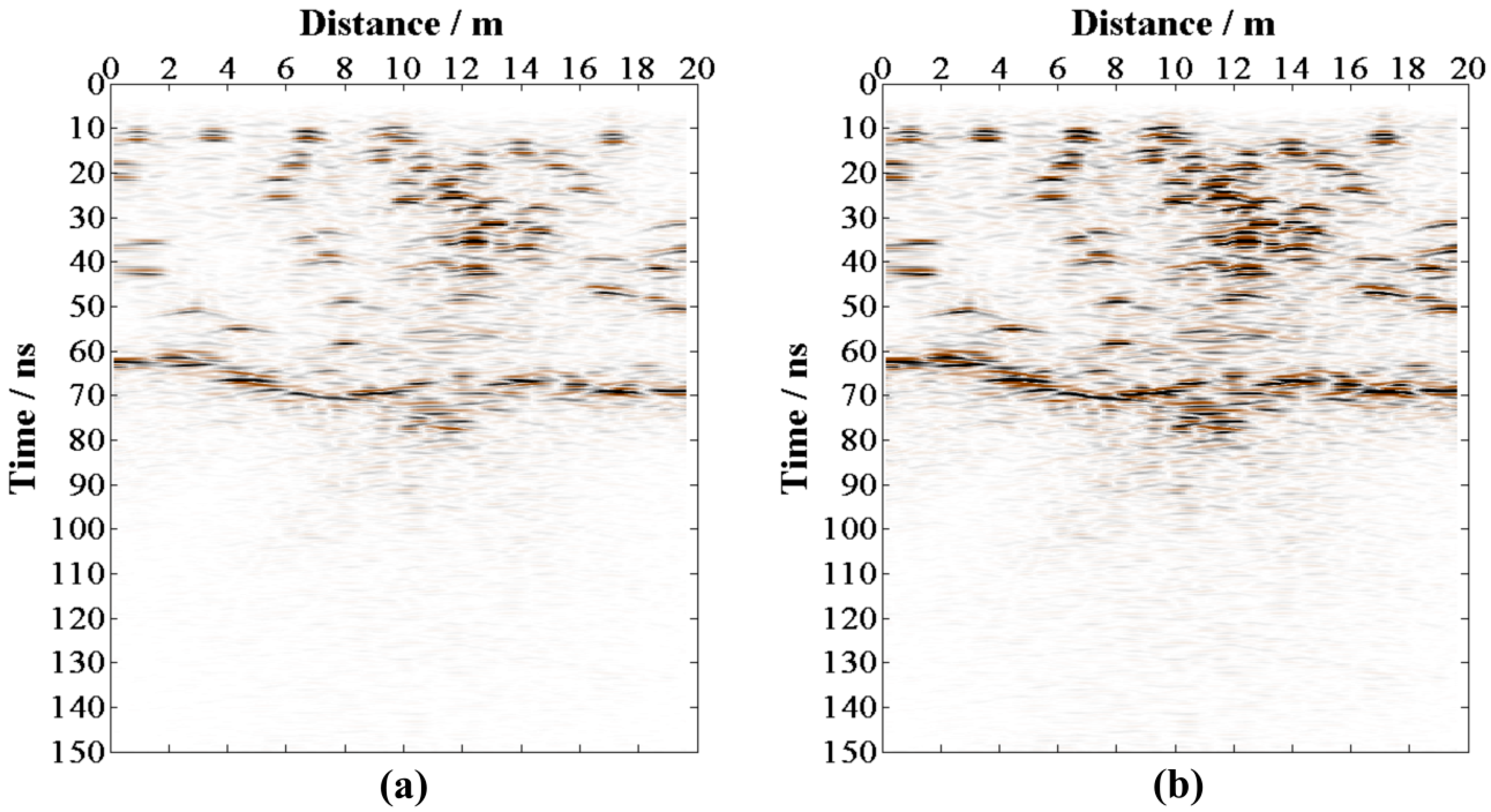
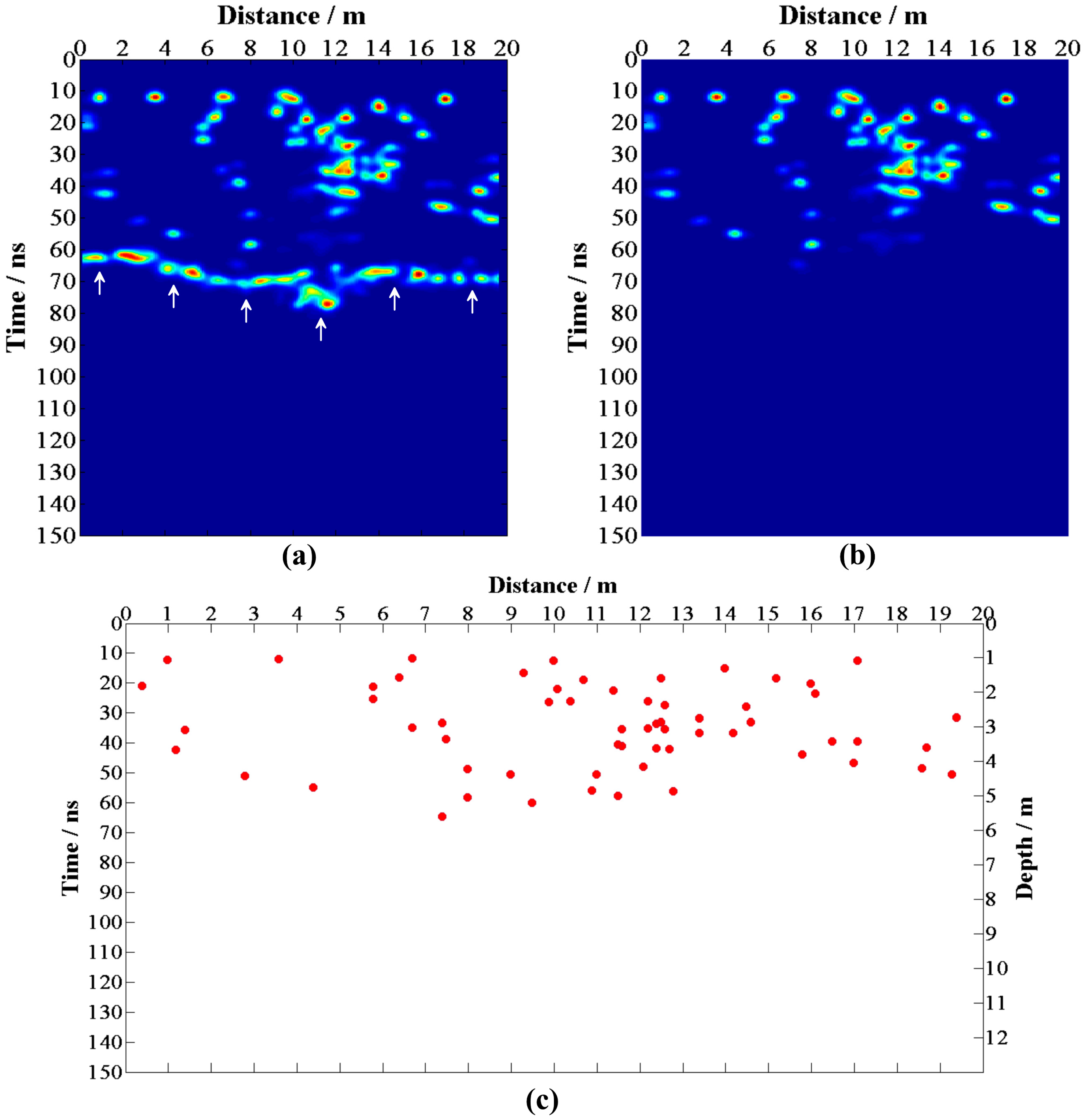
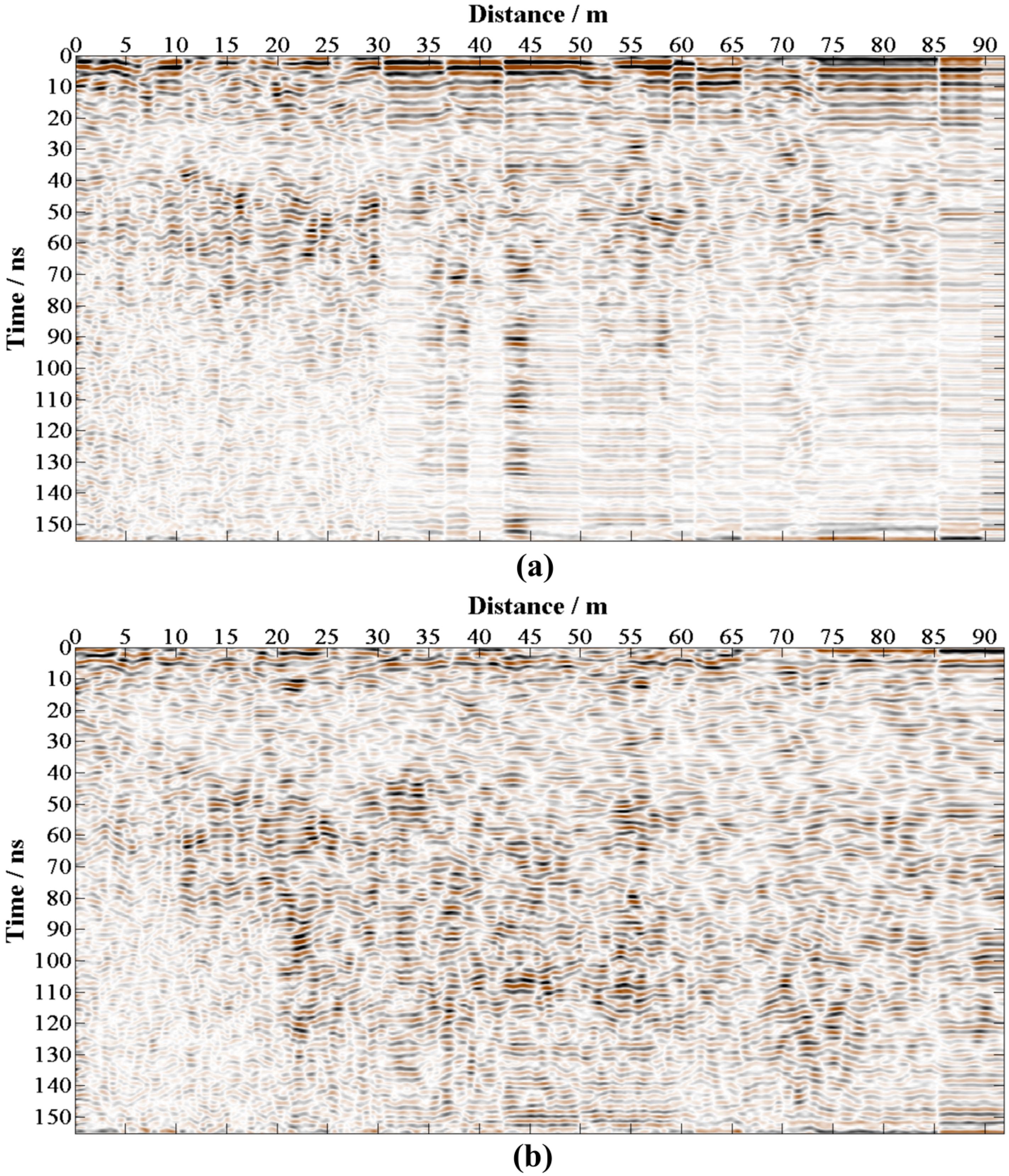
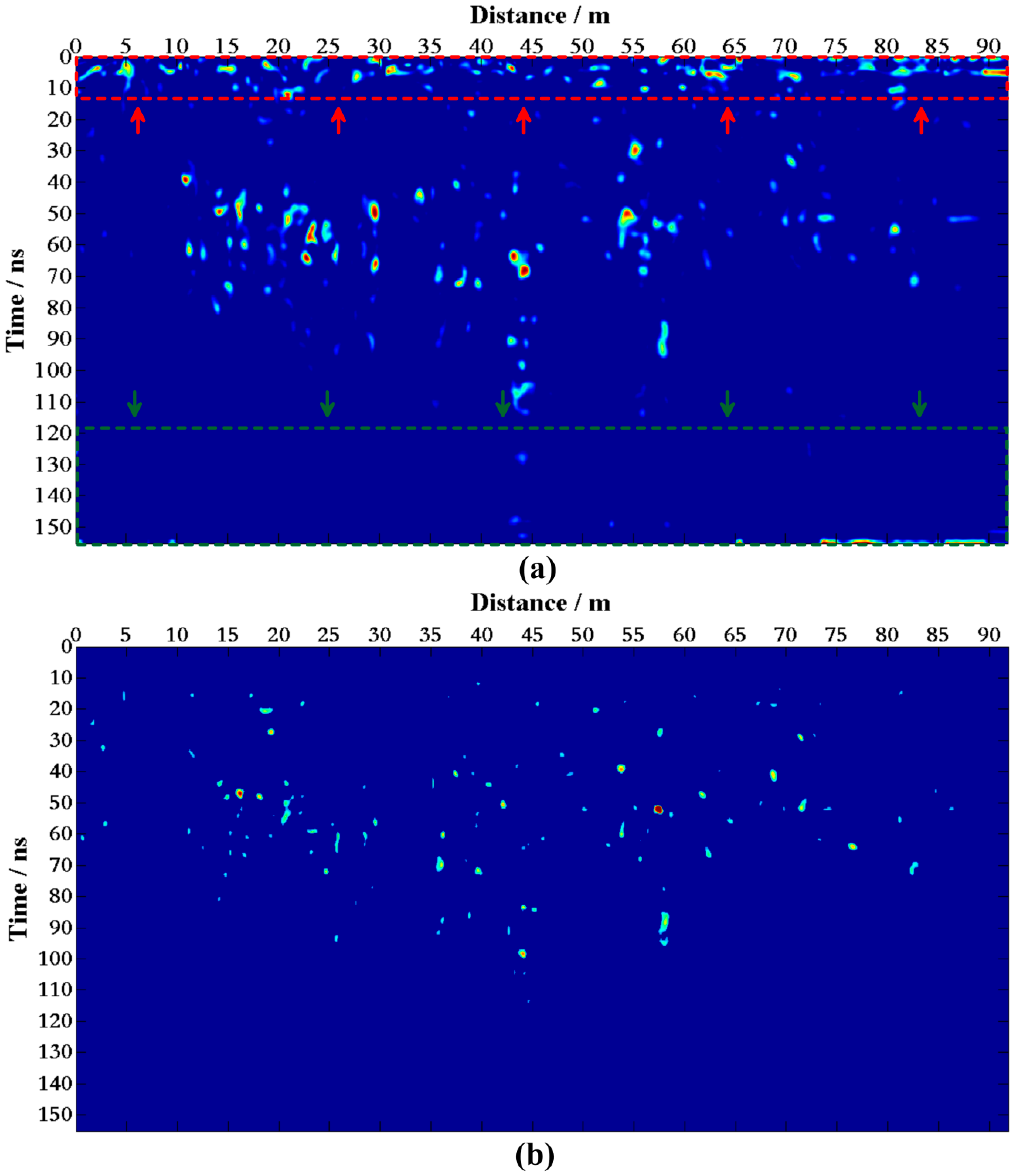
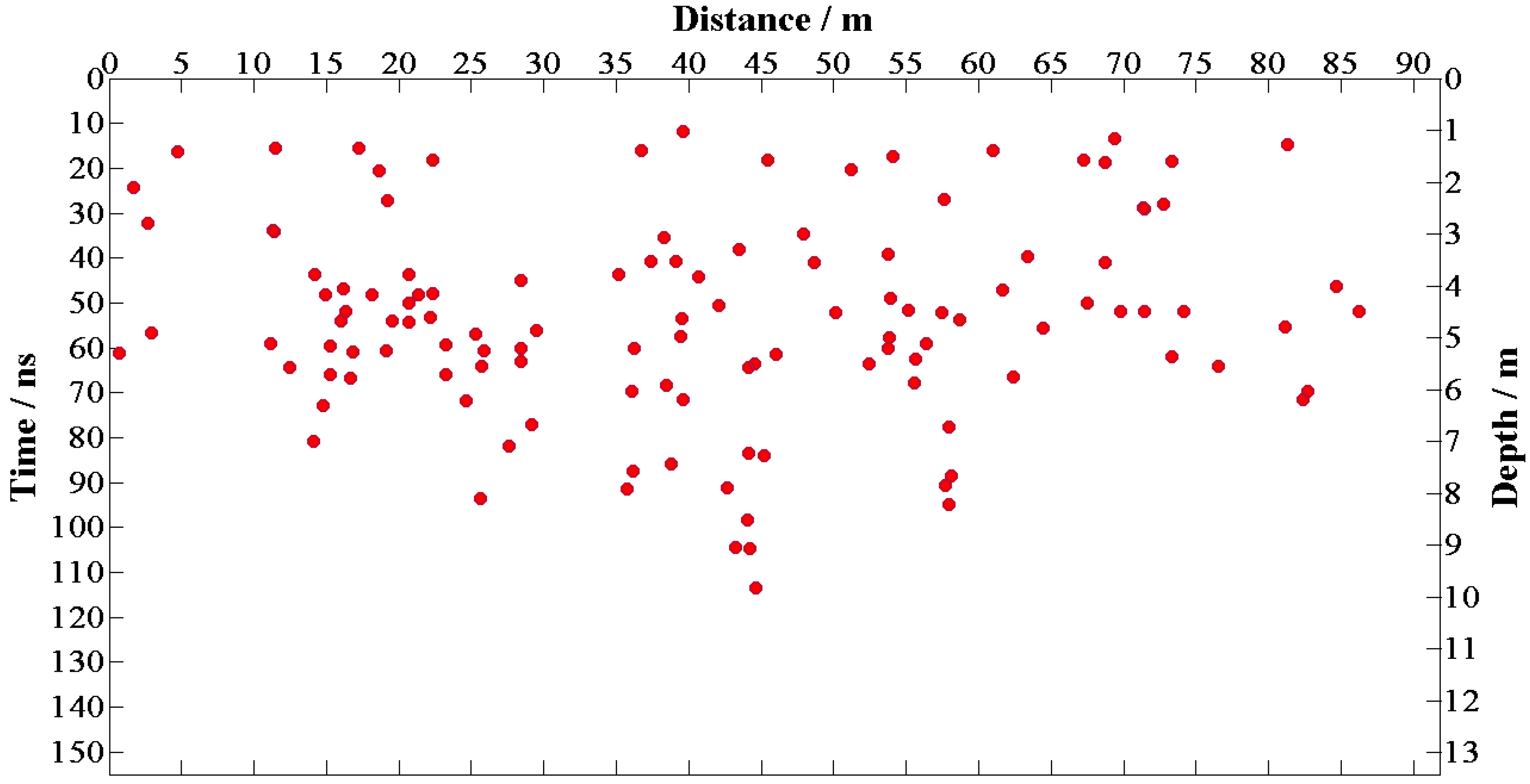
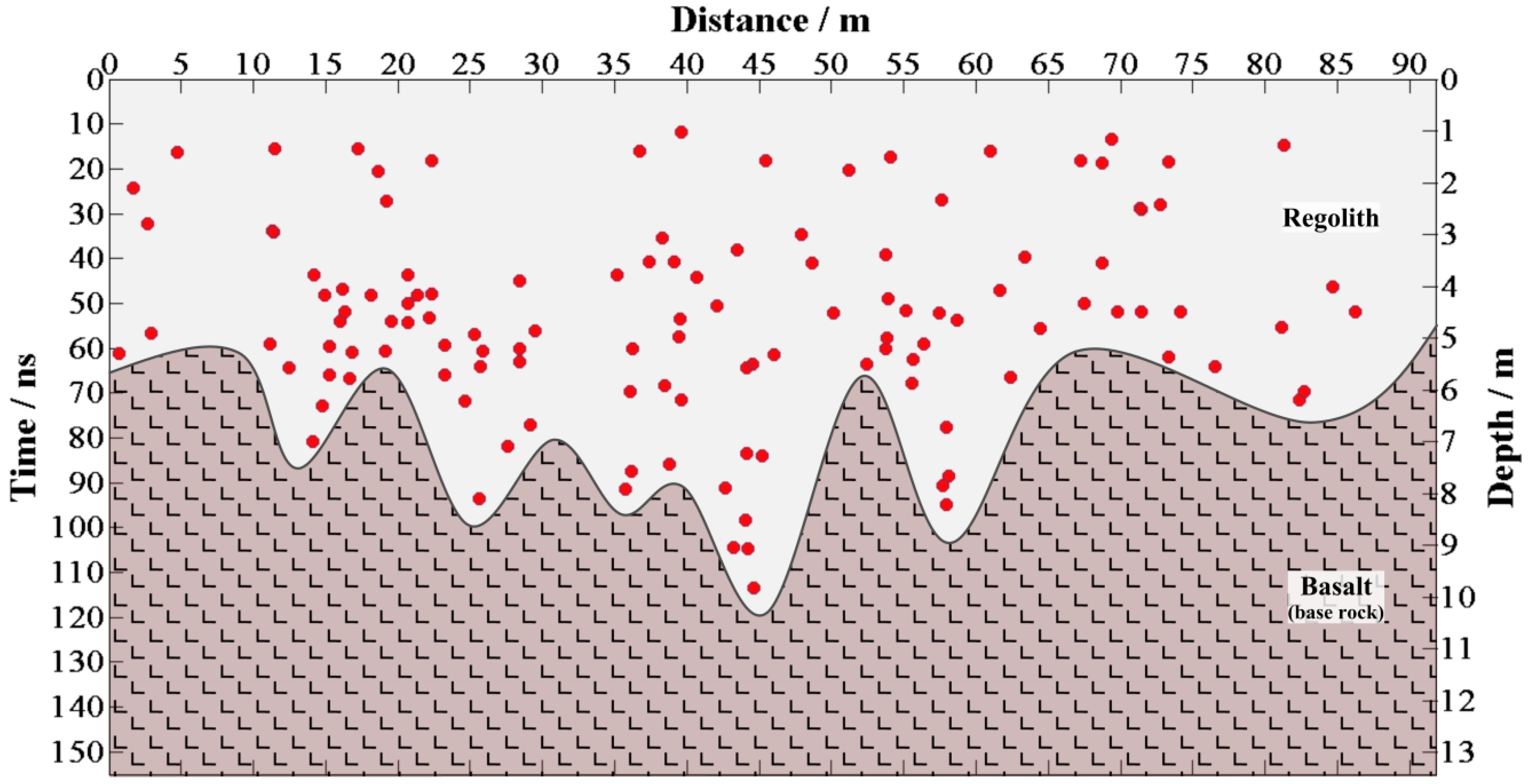
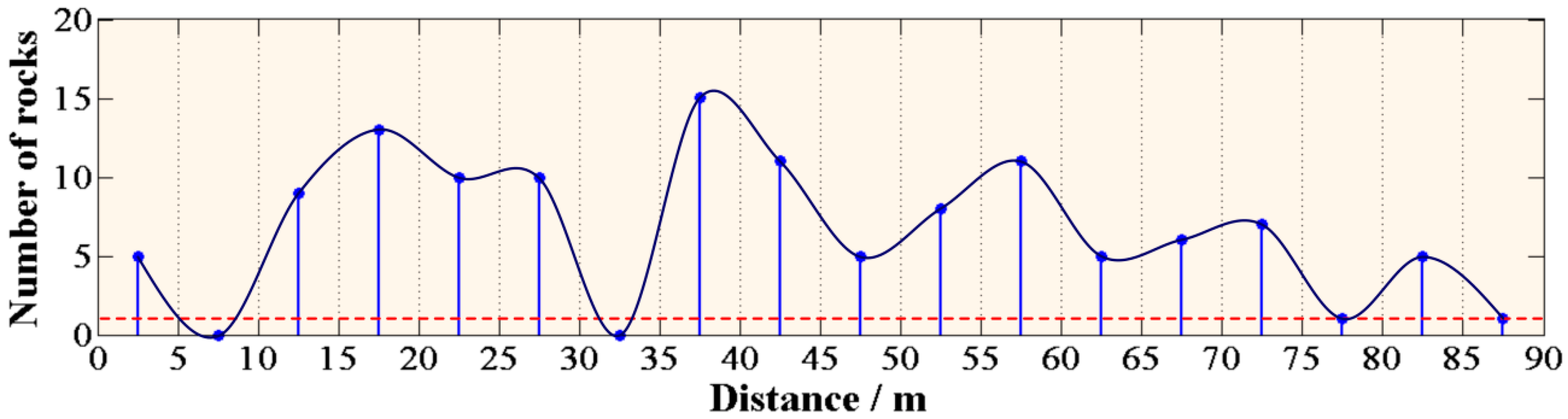
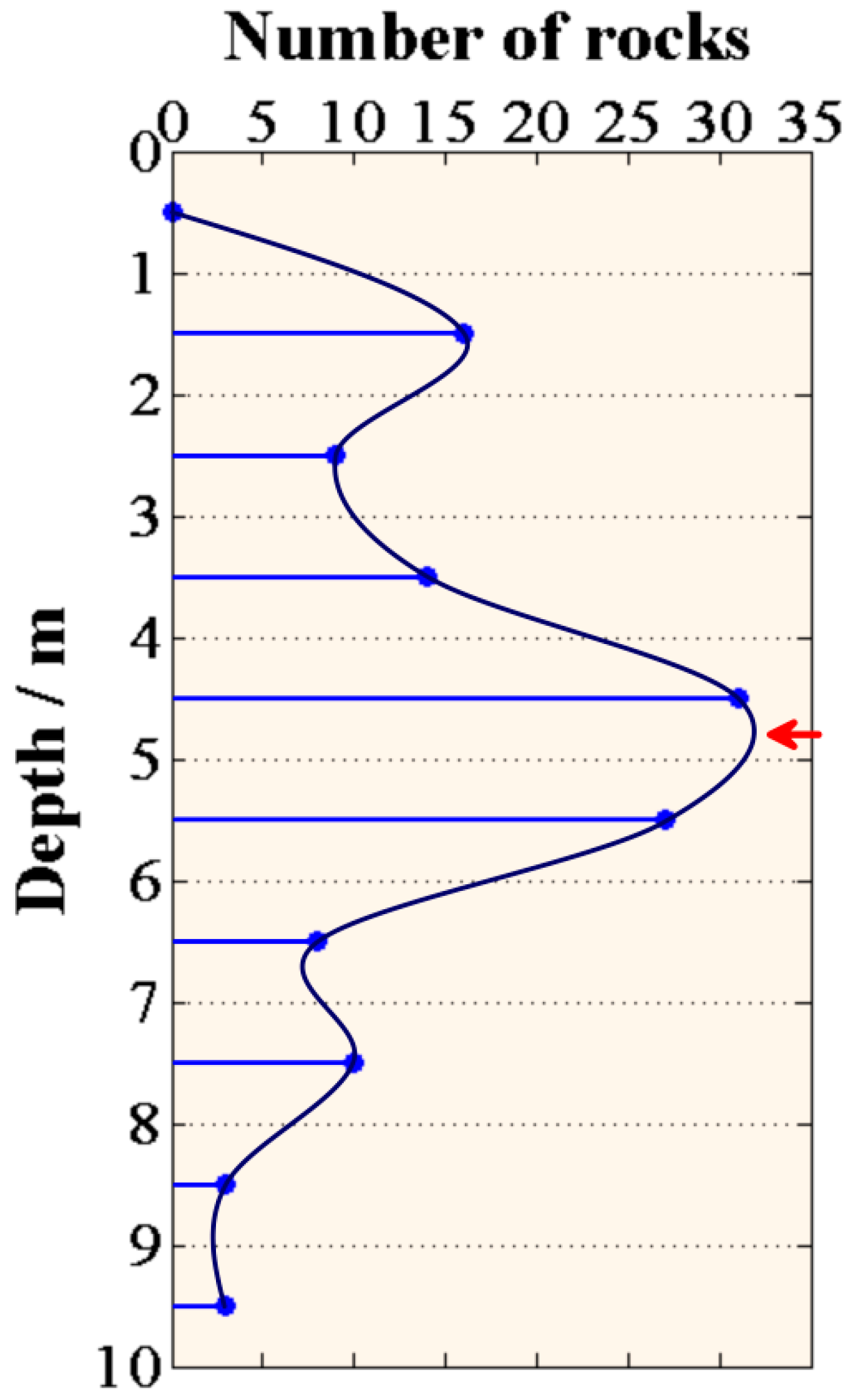
3.2. LPR Data Result
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IDs |
|---|
| CE3_BMYK_LPR-2A_SCI_N_20091231160000_20131215171000_0001_A.2B |
| CE3_BMYK_LPR-2A_SCI_N_20131215171001_20131220141300_0002_A.2B |
| CE3_BMYK_LPR-2A_SCI_N_20131220141301_20131220181800_0003_A.2B |
| CE3_BMYK_LPR-2A_SCI_N_20131220181801_20131221124500_0004_A.2B |
| CE3_BMYK_LPR-2A_SCI_N_20131221124501_20131223174500_0005_A.2B |
| CE3_BMYK_LPR-2A_SCI_N_20131223174501_20131226000000_0006_A.2B |
| CE3_BMYK_LPR-2A_SCI_N_20131226000001_20140112193800_0007_A.2B |
| CE3_BMYK_LPR-2A_SCI_N_20140112193801_20140114213300_0008_A.2B |
| CE3_BMYK_LPR-2A_SCI_N_20140114213301_20140124000000_0009_A.2B |
| CE3_BMYK_LPR-2B_SCI_N_20091231160000_20131215171000_0001_A.2B |
| CE3_BMYK_LPR-2B_SCI_N_20131215171001_20131220141300_0002_A.2B |
| CE3_BMYK_LPR-2B_SCI_N_20131220141301_20131220181800_0003_A.2B |
| CE3_BMYK_LPR-2B_SCI_N_20131220181801_20131221124500_0004_A.2B |
| CE3_BMYK_LPR-2B_SCI_N_20131221124501_20131223174500_0005_A.2B |
| CE3_BMYK_LPR-2B_SCI_N_20131223174501_20131226000000_0006_A.2B |
| CE3_BMYK_LPR-2B_SCI_N_20131226000001_20140112193800_0007_A.2B |
| CE3_BMYK_LPR-2B_SCI_N_20140112193801_20140114213300_0008_A.2B |
| CE3_BMYK_LPR-2B_SCI_N_20140114213301_20140124000000_0009_A.2B |
Appendix B
Review of Local Similarity
Appendix C
| Rock Number | Distance/m | Time/ns | Error/m | ||||
|---|---|---|---|---|---|---|---|
| 1 | 0.68 | 61.56 | 5.81 | 5.30 | 4.91 | −0.51 | 0.39 |
| 6 | 11.14 | 59.38 | 5.60 | 5.11 | 4.74 | −0.49 | 0.38 |
| 11 | 14.14 | 81.25 | 7.67 | 7.01 | 6.49 | −0.67 | 0.52 |
| 16 | 15.24 | 66.25 | 6.25 | 5.71 | 5.29 | −0.55 | 0.42 |
| 21 | 16.86 | 61.25 | 5.78 | 5.28 | 4.89 | −0.50 | 0.39 |
| 26 | 19.26 | 27.50 | 2.58 | 2.35 | 2.18 | −0.22 | 0.17 |
| 31 | 21.38 | 48.44 | 4.57 | 4.17 | 3.86 | −0.40 | 0.31 |
| 36 | 23.28 | 59.69 | 5.63 | 5.14 | 4.76 | −0.49 | 0.38 |
| 41 | 25.86 | 60.94 | 5.75 | 5.25 | 4.86 | −0.50 | 0.39 |
| 46 | 29.22 | 77.50 | 7.32 | 6.68 | 6.19 | −0.64 | 0.50 |
| 51 | 36.16 | 87.81 | 8.30 | 7.58 | 7.02 | −0.72 | 0.56 |
| 56 | 38.48 | 68.75 | 6.49 | 5.93 | 5.49 | −0.57 | 0.44 |
| 61 | 39.64 | 71.88 | 6.79 | 6.20 | 5.74 | −0.59 | 0.46 |
| 66 | 43.26 | 104.69 | 9.90 | 9.04 | 8.37 | −0.86 | 0.67 |
| 71 | 44.24 | 105.00 | 9.93 | 9.07 | 8.39 | −0.87 | 0.67 |
| 76 | 46.04 | 61.88 | 5.84 | 5.33 | 4.94 | −0.51 | 0.40 |
| 81 | 52.44 | 63.75 | 6.02 | 5.49 | 5.09 | −0.52 | 0.41 |
| 86 | 54.12 | 17.81 | 1.66 | 1.52 | 1.40 | −0.14 | 0.11 |
| 91 | 57.50 | 52.50 | 4.95 | 4.52 | 4.18 | −0.43 | 0.34 |
| 96 | 58.10 | 88.75 | 8.39 | 7.66 | 7.09 | −0.73 | 0.57 |
| 101 | 63.42 | 40.00 | 3.77 | 3.44 | 3.18 | −0.33 | 0.25 |
| 106 | 68.74 | 19.06 | 1.78 | 1.62 | 1.50 | −0.15 | 0.12 |
| 111 | 71.48 | 52.19 | 4.92 | 4.49 | 4.16 | −0.43 | 0.33 |
| 116 | 76.58 | 64.38 | 6.08 | 5.55 | 5.14 | −0.53 | 0.41 |
| 121 | 84.74 | 46.56 | 4.39 | 4.01 | 3.71 | −0.38 | 0.30 |
References
- Xiao, L.; Zhu, P.; Fang, G.; Xiao, Z.; Zou, Y.; Zhao, J.; Zhao, N.; Yuan, Y.; Qiao, L.; Zhang, X.; et al. A young multilayered terrane of the northern Mare Imbrium revealed by Chang’E-3 mission. Science 2015, 347, 1226–1229. [Google Scholar] [CrossRef] [PubMed]
- Fang, G.Y.; Zhou, B.; Ji, Y.C.; Zhang, Q.Y.; Shen, S.X.; Li, Y.X.; Guan, H.F.; Tang, C.J.; Gao, Y.Z.; Lu, W.; et al. Lunar Penetrating Radar onboard the Chang’e-3 mission. Res. Astron. Astrophys. 2014, 14, 1607–1622. [Google Scholar] [CrossRef]
- Su, Y.; Fang, G.Y.; Feng, J.Q.; Xing, S.G.; Ji, Y.C.; Zhou, B.; Gao, Y.Z.; Li, H.; Dai, S.; Xiao, Y.; et al. Data processing and initial results of Chang’e-3. lunar penetrating radar. Res. Astron. Astrophys. 2014, 14, 1623–1632. [Google Scholar] [CrossRef]
- Zhang, J.; Yang, W.; Hu, S.; Lin, Y.; Fang, G.; Li, C.; Peng, W.; Zhu, S.; He, Z.; Zhou, B.; et al. Volcanic history of the Imbrium basin: A close-up view from the lunar rover Yutu. Proc. Natl. Acad. Sci. USA 2015, 112, 5342–5347. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fa, W.; Zhu, M.H.; Liu, T.; Plescia, J.B. Regolith stratigraphy at the Chang’E-3 landing site as seen by lunar penetrating radar. Geophys. Res. Lett. 2015, 16, 10–79. [Google Scholar] [CrossRef]
- Lai, J.; Xu, Y.; Zhang, X.; Tang, Z. Structural analysis of lunar subsurface with Chang’E-3 lunar penetrating radar. Planet. Space Sci. 2016, 120, 96–102. [Google Scholar] [CrossRef]
- Zhang, L.; Zeng, Z.; Li, J.; Huang, L.; Huo, Z.; Zhang, J.; Huai, N. A Story of Regolith Told by Lunar Penetrating Radar. Icarus 2019, 321, 148–160. [Google Scholar] [CrossRef]
- Dong, Z.; Fang, G.; Ji, Y.; Gao, Y.; Zhang, X. Parameters and structure of lunar regolith in chang’e-3 landing area from lunar penetrating radar (lpr) data. Icarus 2016, 282, 40–46. [Google Scholar] [CrossRef]
- Zhang, L.; Zeng, Z.; Li, J.; Huang, L.; Huo, Z.; Wang, K.; Zhang, J. Parameter Estimation of Lunar Regolith from Lunar Penetrating Radar Data. Sensors 2018, 18, 2907. [Google Scholar] [CrossRef] [PubMed]
- Trorey, A. A simple theory for seismic diffractions. Geophysics 1970, 35, 1961–1983. [Google Scholar] [CrossRef]
- Bazelaire, E. Normal moveout revisited: Inhomogeneous media and curved interfaces. SEG Tech. Program Expand. Abstr. 1986, 5, 403. [Google Scholar]
- Huang, N.; Shen, Z.; Long, S.; Wu, M.; Shih, H.; Zheng, Q. The empirical mode decomposition and the hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Maïza, B.; Baan, M. Random and coherent noise attenuation by empirical mode decomposition. Geophysics 2009, 74, 89–98. [Google Scholar]
- Cai, H.; He, Z.; Huang, D. Seismic data denoising based on mixed time-frequency methods. Appl. Geophys. 2011, 8, 319–327. [Google Scholar] [CrossRef]
- Chen, Y.; Ma, J. Random noise attenuation by f-x empirical-mode decomposition predictive filtering. Geophysics 2014, 79, 81–91. [Google Scholar] [CrossRef]
- Fomel, S. Local seismic attributes. Geophysics 2007, 72, 29–33. [Google Scholar] [CrossRef]
- Fomel, S. Shaping regularization in geophysical-estimation problems. Geophysics 2007, 24, 29–36. [Google Scholar] [CrossRef]
- Liu, G.; Fomel, S.; Jin, L.; Chen, X. Stacking seismic data using local correlation. Geophysics 2009, 74, 43–48. [Google Scholar] [CrossRef]
- Liu, G.; Fomel, S.; Chen, X. Time-frequency characterization of seismic data using local attributes. Geophysics 2009, 76, 23–24. [Google Scholar] [CrossRef]
- Chen, Y.; Jiao, S.; Ma, J.; Chen, H.; Zhou, Y.; Gan, S. Ground-roll noise attenuation using a simple and effective approach based on local band-limited orthogonalization. IEEE Geosci. Remote Sens. Lett. 2015, 12, 2316–2320. [Google Scholar] [CrossRef]
- Chen, Y.; Fomel, S. Random noise attenuation using local signal-and-noise orthogonalization. Geophysics 2015, 80, 23–24. [Google Scholar] [CrossRef]
- Chen, Y. Iterative deblending with multiple constraints based on shaping regularization. IEEE Geosci. Remote Sens. Lett. 2015, 12, 2247–2251. [Google Scholar] [CrossRef]
- Bekara, M.; van der Baan, M. Local singular value decomposition for signal enhancement of seismic data. Geophysics 2007, 72, 59–65. [Google Scholar] [CrossRef]
- Zhang, L.; Zeng, Z.; Li, J.; Lin, J.; Hu, Y.; Wang, X.; Sun, X. Simulation of the Lunar Regolith and Lunar-Penetrating Radar Data Processing. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2018, 11, 655–663. [Google Scholar] [CrossRef]
- Zhang, L.; Zeng, Z.F.; Li, J.; Lin, J.Y. Study on regolith modeling and lunar penetrating radar simulation. In Proceedings of the 2016 16th International Conference on Ground Penetrating Radar (GPR), Hong Kong, China, 13–16 June 2016. [Google Scholar]
- Li, J.; Zeng, Z.; Liu, C.; Huai, N.; Wang, K. A Study on Lunar Regolith Quantitative Random Model and Lunar Penetrating Radar Parameter Inversion. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1953–1957. [Google Scholar] [CrossRef]
- Irving, J.; Knight, R. Numerical modeling of ground-penetrating radar in 2-D using MATLAB. Comput. Geosci. 2006, 32, 1247–1258. [Google Scholar] [CrossRef]
- Olhoeft, G.; Strangway, D. Dielectric properties of the first 100 meters of the Moon. Earth Planet. Sci. Lett. 1975, 24, 394–404. [Google Scholar] [CrossRef]
- Ulaby, F.; Bengal, T.; Dobson, M.; East, J.R.; Garvin, J.B.; Evans, D.L. Microwave dielectric properties of dry rocks. IEEE Trans. Geosci. Remote Sens. 1990, 28, 325–336. [Google Scholar] [CrossRef]
- Carrier, W.; Olhoeft, G.; Mendell, W. Physical Properties of the Lunar Surface; Cambridge University Press: Cambridge, UK, 1991; pp. 530–552. [Google Scholar]
- Muhleman, D.; Brown, W.; Davids, L. Lunar surface electromagnetic properties. NASA 1969, 184, 203–269. [Google Scholar]
- Kroupenio, N. Some characteristics of the Venus surface. Icarus 1972, 17, 692–698. [Google Scholar] [CrossRef]
- Kroupenio, N. Results of radar experiments performed on automatic stations Luna 16 and Luna 17. In Proceedings of the COSPAR Space Research XIII, Madrid, Spain, 10 May 1972; pp. 969–973. [Google Scholar]
- Shkuratov, Y.; Bondarenko, N. Regolith layer thickness mapping of the moon by radar and optical data. Icarus 2001, 149, 329–338. [Google Scholar] [CrossRef]
- Fa, W.; Jin, Y. A primary analysis of microwave brightness temperature of lunar surface from chang-e 1 multi-channel radiometer observation and inversion of regolith layer thickness. Icarus 2010, 207, 605–615. [Google Scholar] [CrossRef]
- Feng, J.; Su, Y.; Ding, C. Dielectric properties estimation of the lunar regolith at CE-3 landing site using lunar penetrating radar data. Icarus 2016, 284, 424–430. [Google Scholar] [CrossRef]
- Li, Y.; Lu, W.; Fang, G.; Shen, S. The Imaging Method and Verification Experiment of Chang’E-5 Lunar Regolith Penetrating Array Radar. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1006–1010. [Google Scholar] [CrossRef]















| Type | N | m | ||
|---|---|---|---|---|
| High-pass | 6 | 2 | , | |
| Mid-pass | 6 | 3 | , , | |
| Low-pass | 6 | 2 | , |
| Result A | Result B | |
|---|---|---|
| Height | 0.3 m | |
| Offset | 0.16m | 0.32m |
| Center frequency | 500MHz | |
| Wavelet | Ricker | |
| Absorbing boundary | C-PML | |
| Discrete grid | 0.005 m * 0.005 m | |
| Time step | 0.040434 ns | |
| Time window | 120 ns | |
| Random access memory | 8.00 GB | |
| Central Processing Unit | Intel(R) Core (TM) i5-4590 CPU @3.30GHz | |
| Time | 24.7699 h | 24.8101 h |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, B.; Wang, D.; Zhang, L.; Zeng, Z. Rock Location and Quantitative Analysis of Regolith at the Chang’e 3 Landing Site Based on Local Similarity Constraint. Remote Sens. 2019, 11, 530. https://doi.org/10.3390/rs11050530
Hu B, Wang D, Zhang L, Zeng Z. Rock Location and Quantitative Analysis of Regolith at the Chang’e 3 Landing Site Based on Local Similarity Constraint. Remote Sensing. 2019; 11(5):530. https://doi.org/10.3390/rs11050530
Chicago/Turabian StyleHu, Bin, Deli Wang, Ling Zhang, and Zhaofa Zeng. 2019. "Rock Location and Quantitative Analysis of Regolith at the Chang’e 3 Landing Site Based on Local Similarity Constraint" Remote Sensing 11, no. 5: 530. https://doi.org/10.3390/rs11050530
APA StyleHu, B., Wang, D., Zhang, L., & Zeng, Z. (2019). Rock Location and Quantitative Analysis of Regolith at the Chang’e 3 Landing Site Based on Local Similarity Constraint. Remote Sensing, 11(5), 530. https://doi.org/10.3390/rs11050530