Surface Parameters Retrieval from Fully Bistatic Radar Scattering Data



Abstract
:
1. Introduction
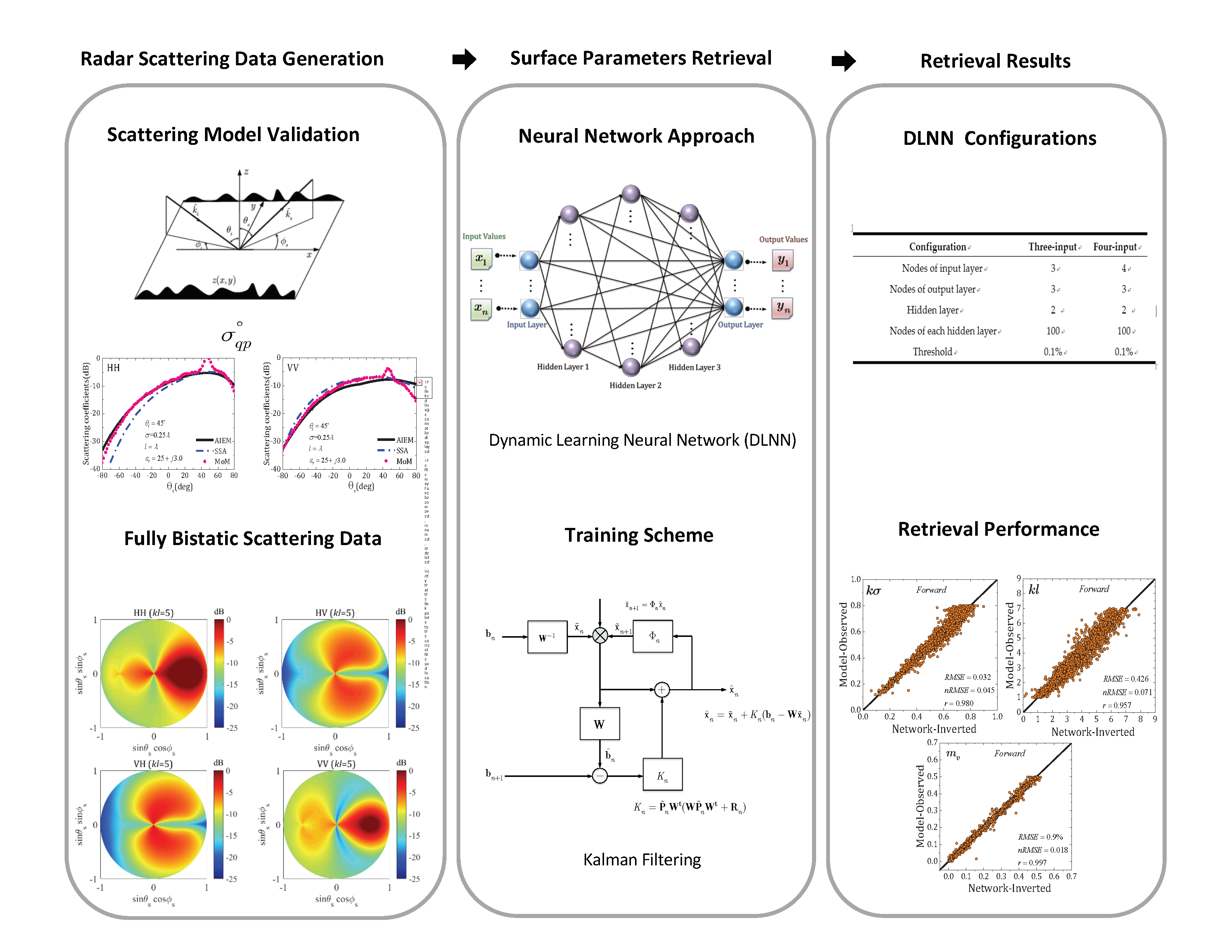
2. Fully Bistatic Radar Scattering Data Generated by the AIEM Model
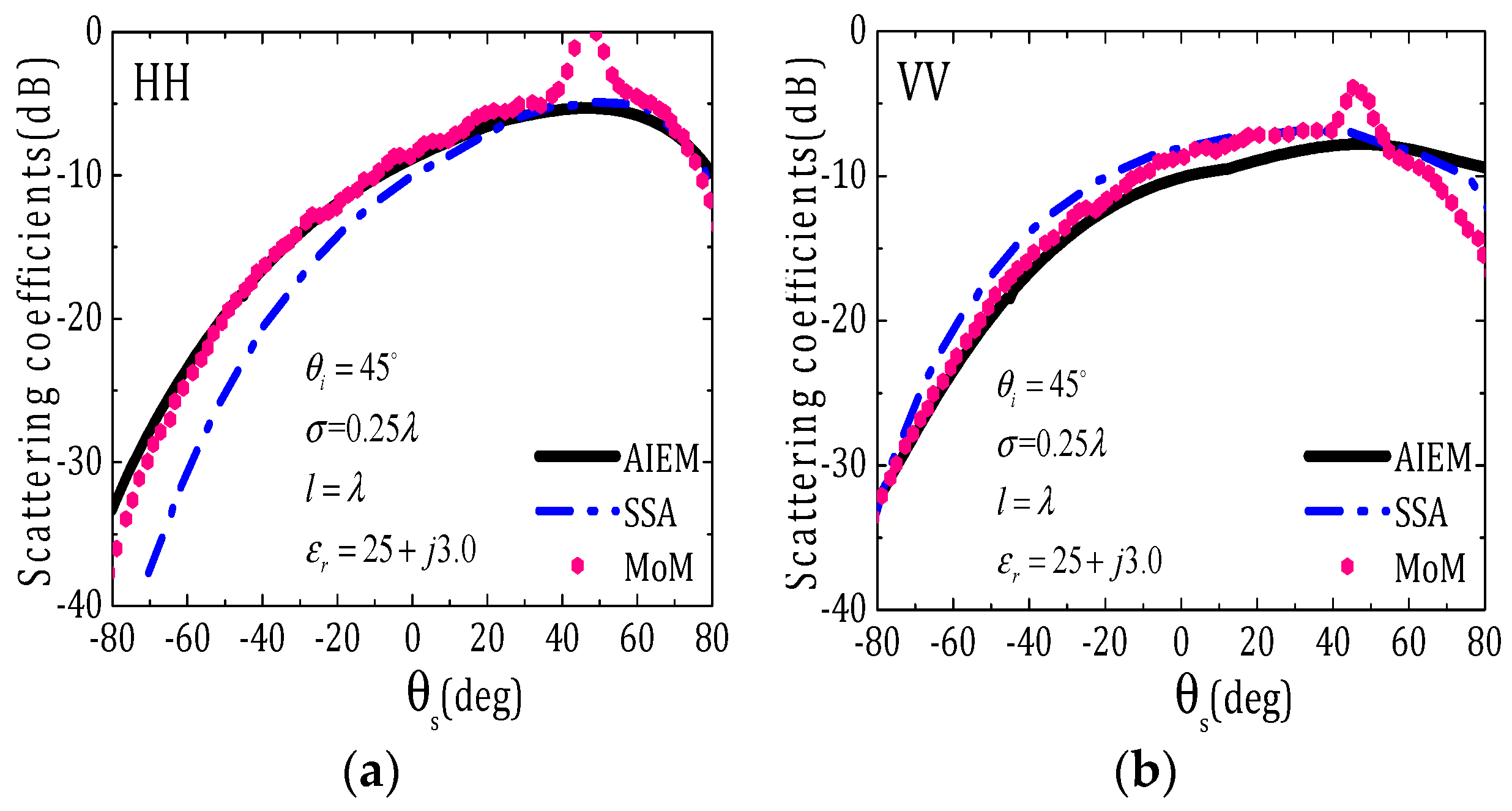
2.1. Validation of a Bistatic Scattering Model
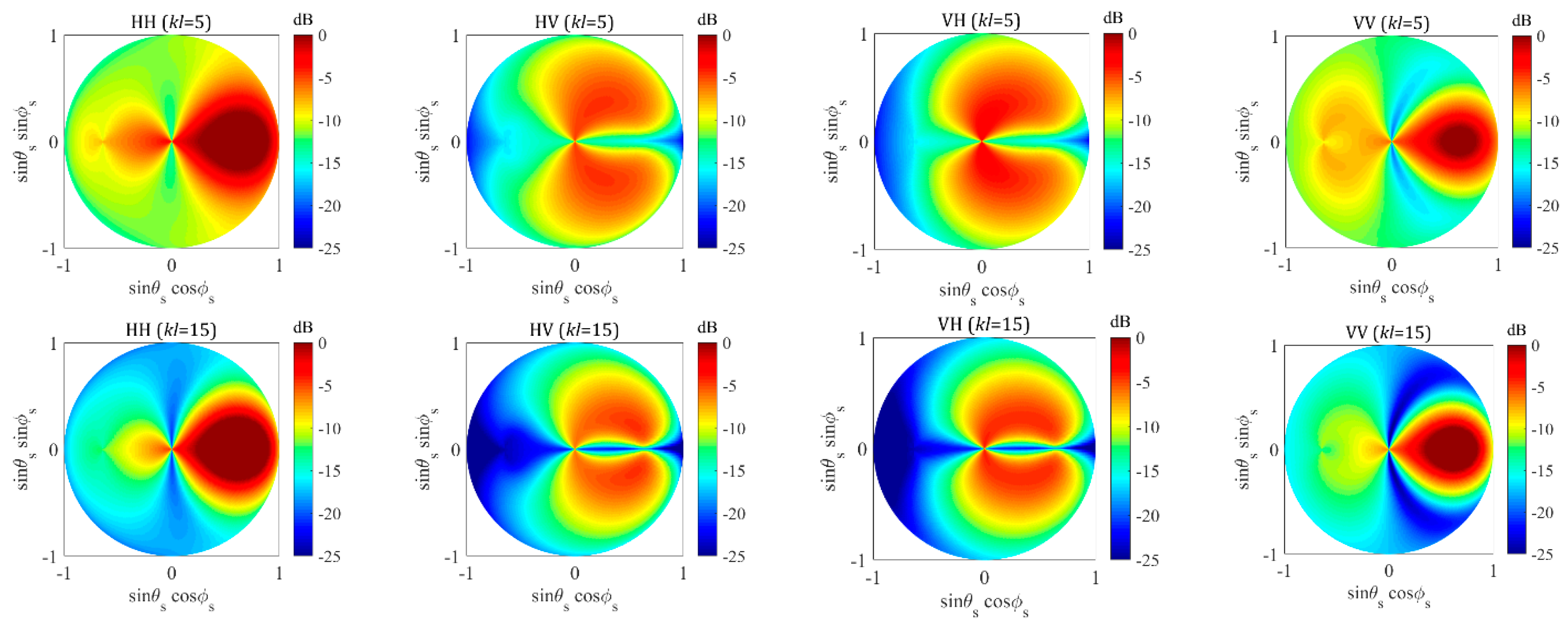
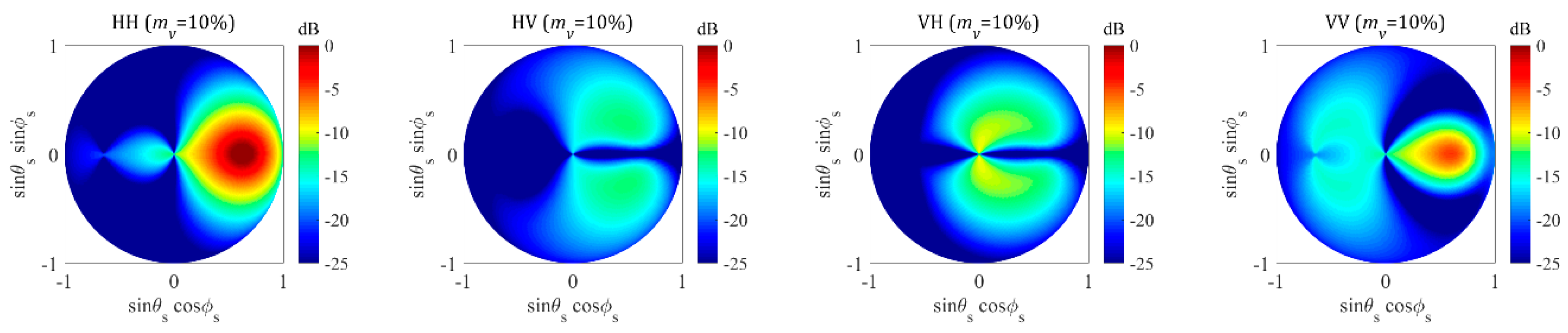
2.2. Data Generation and Sensitivity of Bistatic Scattering to Surface Parameters
3. Surface Parameters Retrieval
3.1. A Neural Network Approach
3.2. Training Scheme
4. Results and Discussions
4.1. Data Input–Output and Training Samples
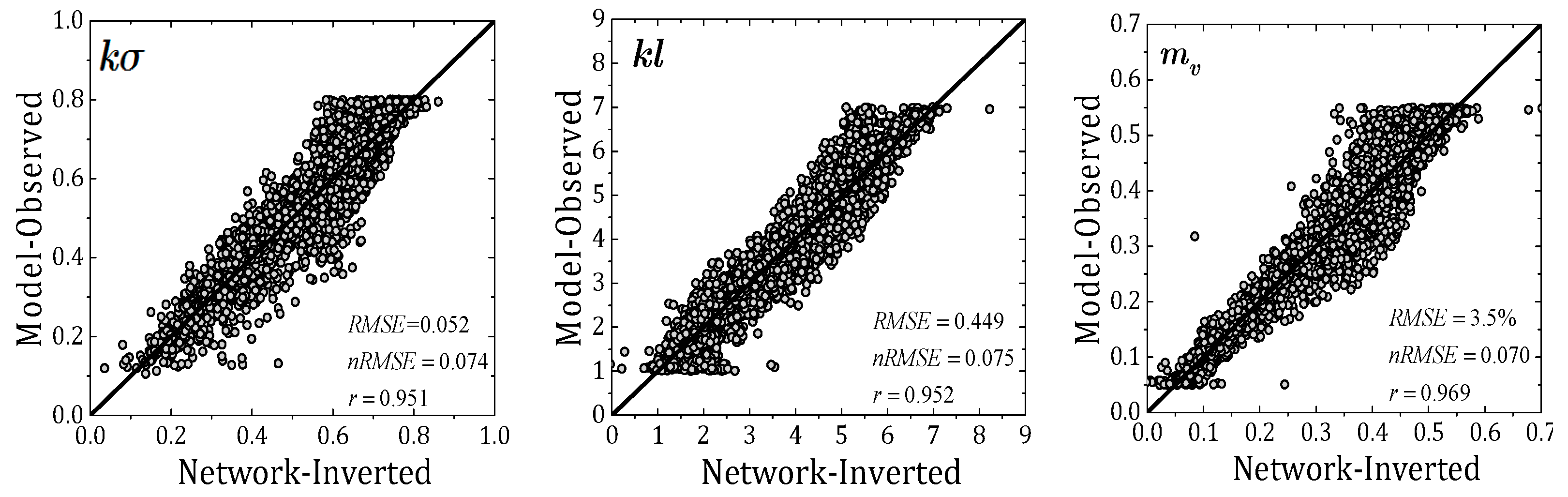
4.2. Retrieval Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tsang, L.; Kong, J.A.; Shin, R.T. Theory of Microwave Remote Sensing; Wiley-Interscience: New York, NY, USA, 1985. [Google Scholar]
- Fung, A.K. Microwave Scattering and Emission Models and Their Applications; Artech House: Norwell, MA, USA, 1994. [Google Scholar]
- Fung, A.K.; Chen, K.S. Microwave Scattering and Emission Models for Users; Artech House: Norwood, MA, USA, 2010. [Google Scholar]
- Ulaby, F.T.; Long, D. Microwave Radar and Radiometric Remote Sensing; University of Michigan: Ann Arbor, MI, USA, 2014. [Google Scholar]
- Schiavulli, D.; Nunziata, F.; Pugliano, G.; Migliaccio, M. Reconstruction of the normalized radar cross section field from GNSS-R delay-doppler map. IEEE J. Sel. Top. Appl. Earth Sci. Remote Sens. 2014, 7, 1573–1583. [Google Scholar] [CrossRef]
- Zavorotny, V.U.; Voronovich, A.G. Scattering of GPS signal from the ocean with wind remote sensing application. IEEE Trans. Geosci. Remote Sens. 2000, 38, 951–964. [Google Scholar] [CrossRef]
- Kim, S.B.; Moghaddam, M.; Tsang, L.; Burgin, M.; Xu, X.; Njoku, E.G. Models of L-band radar backscattering coefficients over global terrain for soil moisture retrieval. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1381–1396. [Google Scholar] [CrossRef]
- Kim, S.B.; van Zyl, J.J.; Johnson, J.T.; Moghaddam, M.; Tsang, L.; Colliander, A.; Dunbar, R.S. Surface soil moisture retrieval using the L-Band synthetic aperture radar onboard the soil moisture active-passive satellite and evaluation at core validation sites. IEEE Trans. Geosci. Remote Sens. 2017, 55, 1897–1914. [Google Scholar] [CrossRef]
- Shao, W.Z.; Zhang, Z.; Li, X.M.; Wang, W.L. Sea surface wind speed retrieval from TerraSAR-X HH polarization data using an improved polarization ratio model. IEEE J. Sel. Top. Appl. Earth Sci. Remote Sens. 2016, 9, 4991–4997. [Google Scholar] [CrossRef]
- Neelam, M.; Colliander, A.; Mohanty, B.P.; Jackson, T.J.; Cosh, M.H.; Misra, S. Multi-scale surface roughness model for soil moisture retrieval. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 4963–4965. [Google Scholar]
- Gelman, A.; Carlin, J.B.; Stern, H.S.; Dunson, D.B.; Vehtari, A.; Rubin, D.B. Bayesian Data Analysis, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Tsang, L.; Chen, Z.X.; Oh, S.; Mark, R.J., II; Chang, A.T.C. Inversion of snow parameters from passive microwave remote sensing measurements by a neural network trained with a multiple scattering model. IEEE Trans. Geosci. Remote Sens. 1992, 30, 1015–1024. [Google Scholar] [CrossRef]
- Dawson, M.S.; Olvera, J.; Fung, A.K.; Manry, M.T. Inversion of surface parameters using fast learning neural network. In Proceedings of the IGARSS’92, Houston, TX, USA, 26–29 May 1992; pp. 910–912. [Google Scholar]
- Davis, D.T.; Chen, Z.X.; Tsang, L.; Hwang, J.N.; Chang, A.T.C. Retrieval of snow parameters by iterative inversion of a neural network. IEEE Trans. Geosci. Remote Sens. 1993, 31, 827–841. [Google Scholar] [CrossRef]
- Chen, K.S.; Kao, W.L.; Tzeng, Y.C. Retrieval of surface parameters using dynamic learning neural network. Int. J. Remote Sens. 1995, 16, 801–809. [Google Scholar] [CrossRef]
- Chen, K.S.; Wu, T.D.; Shi, J.C. A model-based inversion of rough soil surface parameters from radar measurements. J. Electromagn. Waves Appl. 2001, 15, 173–200. [Google Scholar] [CrossRef]
- Thiria, S.; Mejia, C.; Badran, F. A neural network approach for modeling nonlinear transfer functions: Application for wind retrieval from space borne scatter meter data. J. Geophys. Res. Oceans 1993, 98, 22827–22841. [Google Scholar] [CrossRef]
- Chen, K.S.; Tzeng, Y.C.; Chen, P.C. Retrieval of ocean winds from satellite scatter meter by a neural network. IEEE Trans. Geosci. Remote Sens. 1999, 37, 247–256. [Google Scholar] [CrossRef]
- Hey, T.; Tansley, S.; Toll, K. The Fourth Paradigm: Data-Intensive Scientific Discovery, 1st ed.; Microsoft Research: Mountain View, CA, USA, 2009. [Google Scholar]
- Chen, K.S.; Wu, T.D.; Tsang, L.; Li, Q.; Shi, J.C.; Fung, A.K. Emission of rough surfaces calculated by the integral equation method with comparison to three-dimensional moment method simulations. IEEE Trans. Geosci. Remote Sens. 2003, 41, 90–101. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, K.S.; Tsang, L.; Yu, L. Depolarized backscattering of rough surface by AIEM model. IEEE J. Sel. Top. Appl. Earth Sci. Remote Sens. 2017, 10, 4740–4752. [Google Scholar] [CrossRef]
- Fung, A.K.; Li, Q.; Chen, K.S. Backscattering from a randomly rough dielectric surface. IEEE Trans. Geosci. Remote Sens. 1992, 30, 356–369. [Google Scholar] [CrossRef]
- Chen, K.S.; Wu, T.D.; Fung, A.K. A Note on the multiple scattering in an IEM model. IEEE Trans. Geosci. Remote Sens. 2000, 38, 249–256. [Google Scholar] [CrossRef]
- Huang, S.; Tsang, L. Electromagnetic scattering of randomly rough soil surfaces based on numerical solutions of Maxwell equations in three-dimensional simulations using a hybrid UV/PBTG/SMCG method. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4025–4035. [Google Scholar] [CrossRef]
- Huang, S.; Tsang, L.; Njoku, E.G.; Chen, K.S. Backscattering coefficients, coherent reflectivities, and emissivities of randomly rough soil surfaces at L-band for SMAP applications based on numerical solutions of Maxwell equations in three-dimensional simulations. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2557–2568. [Google Scholar] [CrossRef]
- Liao, T.H.; Tsang, L.; Huang, S.; Niamsuwan, N.; Jaruwatanadilok, S.; Kim, S.B.; Ren, H.; Chen, K.L. Co-polarized and cross-polarized backscattering from random rough soil surfaces from L-band to Ku-band using numerical solutions of Maxwell’s equations with near-field precondition. IEEE Trans. Geosci. Remote Sens. 2016, 54, 651–662. [Google Scholar] [CrossRef]
- Tsang, L.; Ding, K.H.; Huang, S.W.; Xu, X.L. Electromagnetic computation in scattering of electromagnetic waves by random rough surface and dense media in microwave remote sensing of land surfaces. Proc. IEEE 2013, 101, 255–279. [Google Scholar] [CrossRef]
- Oh, Y.; Sarabandi, K.; Ulaby, F.T. An empirical model and an inversion technique for radar scattering from bare soil surfaces. IEEE Trans. Geosci. Remote Sens. 1992, 30, 370–381. [Google Scholar] [CrossRef]
- Hallikainen, M.T.; Ulaby, F.T.; Dobson, M.C.; El-Rayes, M.A.; Wu, L.K. Microwave dielectric behavior of wet soil—Part I: Empirical models and experimental observation. IEEE Trans. Geosci. Remote Sens. 1985, GE-23, 25–34. [Google Scholar] [CrossRef]
- Dobson, M.C.; Ulaby, F.T.; Hallikainen, M.T.; El-Rayes, M.A. Microwave dielectric behavior of wet soil—Part II: Dielectric mixing models. IEEE Trans. Geosci. Remote Sens. 1985, GE-23, 35–46. [Google Scholar] [CrossRef]
- Zeng, J.Y.; Chen, K.S.; Bi, H.Y.; Zhao, T.J.; Yang, X.F. A comprehensive analysis of rough soil surface scattering and emission predicted by AIEM with comparison to numerical simulations and experimental measurements. IEEE Trans. Geosci. Remote Sens. 2017, 55, 1–13. [Google Scholar] [CrossRef]
- Çetin, M.; Karl, W.C. Feature-Enhanced Synthetic Aperture Radar Image Formation Based on Nonquadratic Regularization. IEEE Trans. Image Process. 2001, 10, 623–631. [Google Scholar] [CrossRef]
- Tzeng, Y.C.; Chen, K.S.; Kao, W.L.; Fung, A.K. A dynamic learning neural network for remote sensing applications. IEEE Trans. Geosci. Remote Sens. 1994, 32, 1096–1102. [Google Scholar] [CrossRef]
- Scharf, L.L. Statistical Signal Processing—Detection, Estimation, and Time-Series Analysis; Addison Wesley Publishing Co.: Reading, MA, USA, 1991. [Google Scholar]
- Hauck, B.; Ulaby, F.; DeRoo, R. Polarimetric bistatic measurement facility for point and distributed targets. IEEE Antennas. Propag. Mag. 1998, 40, 31–41. [Google Scholar] [CrossRef]
- Nashashibi, A.Y.; Ulaby, F.T. MMW polarimetric radar bistatic scattering from a random surface. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1743–1755. [Google Scholar] [CrossRef]
- Macelloni, G.; Nesti, G.; Pampaloni, P.; Sigismondi, S.; Tarchi, D.; Lolli, S. Experimental validation of surface scattering and emission models. IEEE Trans. Geosci. Remote Sens. 2000, 38, 459–469. [Google Scholar] [CrossRef]
- Brogioi, M.; Pettinato, S.; Macelloni, G.; Paloscia, S.; Pampaloni, P.; Pierdicca, N.; Ticconi, F. Sensitivity of bistatic scattering to soil moisture and surface roughness of bare soils. Int. J. Remote Sens. 2010, 31, 4227–4255. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Backscattering (Three-Input) | Bistatic Scattering (Three-Input & Four-Input) | ||
|---|---|---|---|
| Input | Output | Input | Output |
| HH, VV and HV polarized backscattering coefficients of | Normalized surface roughness and soil moisture | HH, HV, VH and VV polarized bistatic coefficients | Normalized surface roughness and soil moisture |
| Configuration | Three-Input | Four-Input |
|---|---|---|
| Nodes of input layer | 3 | 4 |
| Nodes of output layer | 3 | 3 |
| Hidden layer | 2 | 2 |
| Nodes of each hidden layer | 100 | 100 |
| Threshold | 0.1% | 0.1% |
| Parameters | Backscattering | Bistatic Scattering |
|---|---|---|
| 0.1~0.8 | 0.1~0.8 | |
| 1~7 | 1~7 | |
| mv | 0~0.5 | 0~0.5 |
| 10°~60° | 10°~60° | |
| = | 10°~60° | |
| 180° | 0°~90°(forward) 90°~180°(backward) | |
| 0.1~0.4 | 0.1~0.4 | |
| Gaussian, Exponential, 1.5-Power | ||
| Truth (POLARSCAT Data) | Inverted (Network-Inverted) | ||||
|---|---|---|---|---|---|
| mv | mv | ||||
| 0.949 | 2.768 | 0.142 | 0.907804 | 2.75213 | 0.141224 |
| 3.004 | 8.765 | 0.172 | 7.1636 | 12.1984 | 0.232222 |
| 0.352 | 2.617 | 0.266 | 0.346407 | 2.61012 | 0.265967 |
| 0.126 | 2.62 | 0.126 | 0.126175 | 2.62442 | 0.125997 |
| 0.352 | 2.617 | 0.14 | 0.371045 | 2.6396 | 0.14006 |
| 0.101 | 3.098 | 0.09 | 0.103238 | 3.15896 | 0.08993 |
| 1.114 | 8.287 | 0.14 | 1.20734 | 8.85712 | 0.137385 |
| 0.796 | 16.594 | 0.253 | 1.66042 | 5.38294 | 0.364186 |
| 3.004 | 8.765 | 0.172 | 3.03834 | 8.83309 | 0.172412 |
| 0.949 | 2.768 | 0.172 | 0.948958 | 2.76862 | 0.172035 |
| 6.009 | 17.529 | 0.172 | 2.69795 | 5.08291 | 0.16386 |
| 6.009 | 17.529 | 0.142 | 5.91543 | 17.6258 | 0.142792 |
| 0.352 | 2.617 | 0.266 | 0.351636 | 2.61618 | 0.266002 |
| 2.228 | 16.574 | 0.14 | 2.22803 | 16.5737 | 0.140001 |
| 0.796 | 16.594 | 0.253 | 0.797609 | 16.6051 | 0.252946 |
| 2.228 | 16.574 | 0.14 | 2.24075 | 16.5635 | 0.139998 |
| 0.398 | 8.297 | 0.253 | 0.396886 | 8.30057 | 0.252988 |
| 3.004 | 8.765 | 0.172 | 3.06484 | 8.54212 | 0.172106 |
| Error | mv | ||||
| RMSE | 1.2701 | 4.0330 | 2.987% | ||
| nRMSE | 0.2149 | 0.2705 | 0.2134 | ||
| r | 0.7706 | 0.7761 | 0.9150 | ||
| Backscattering & Bistatic Scatter | Error | mv | |||
|---|---|---|---|---|---|
| Backscattering (Three-input) | nRMSE | 0.074 | 0.075 | 0.070 | |
| r | 0.951 | 0.952 | 0.969 | ||
| Bistatic scattering(Three-input) | Backward | nRMSE | 0.075 | 0.087 | 0.039 |
| r | 0.951 | 0.936 | 0.990 | ||
| Forward | nRMSE | 0.040 | 0.070 | 0.044 | |
| r | 0.985 | 0.959 | 0.988 | ||
| Full (Backward + Forward) | nRMSE | 0.058 | 0.097 | 0.042 | |
| r | 0.970 | 0.949 | 0.991 | ||
| Bistatic scattering (Four-input) | Backward | nRMSE | 0.060 | 0.088 | 0.044 |
| r | 0.967 | 0.934 | 0.988 | ||
| Forward | nRMSE | 0.045 | 0.071 | 0.018 | |
| r | 0.980 | 0.957 | 0.997 | ||
| Full (Backward + Forward) | nRMSE | 0.053 | 0.080 | 0.034 | |
| r | 0.974 | 0.945 | 0.992 | ||
| Truth (Measured) | Inverted (Network-Inverted) | Difference (Absolute) | ||||||
|---|---|---|---|---|---|---|---|---|
| mv | mv | mv | ||||||
| 1.05 | 2.51 | 0.16 | 1.24 | 2.48 | 0.17 | 0.19 | 0.03 | 0.59% |
| 2.09 | 5.02 | 0.12 | 1.99 | 5.27 | 0.12 | 0.09 | 0.25 | 0.28% |
| 2.62 | 6.28 | 0.11 | 2.83 | 8.74 | 0.11 | 0.21 | 2.46 | 0.41% |
| 4.19 | 10.05 | 0.12 | 4.25 | 9.99 | 0.13 | 0.06 | 0.06 | 1.43% |
| 5.23 | 12.56 | 0.10 | 7.49 | 12.56 | 0.09 | 2.25 | 0.004 | 0.11% |
| 8.37 | 20.09 | 0.09 | 7.64 | 22.46 | 0.09 | 0.73 | 2.37 | 0.48% |
| 0.20 | 1.00 | 0.87 | 0.19 | 1.10 | 0.94 | 0.006 | 0.10 | 6.57% |
| 3.28 | 29.60 | 0.07 | 3.10 | 32.98 | 0.06 | 0.18 | 3.38 | 0.34% |
| mv | ||||||||
| RMSE | 0.85 | RMSE | 1.70 | RMSE | 2.41% | |||
| nRMSE | 0.10 | nRMSE | 0.09 | nRMSE | 0.03 | |||
| r | 0.95 | r | 0.99 | r | 0.99 | |||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Y.; Chen, K.-S.; Shang, G. Surface Parameters Retrieval from Fully Bistatic Radar Scattering Data. Remote Sens. 2019, 11, 596. https://doi.org/10.3390/rs11050596
Yang Y, Chen K-S, Shang G. Surface Parameters Retrieval from Fully Bistatic Radar Scattering Data. Remote Sensing. 2019; 11(5):596. https://doi.org/10.3390/rs11050596
Chicago/Turabian StyleYang, Ying, Kun-Shan Chen, and Guofei Shang. 2019. "Surface Parameters Retrieval from Fully Bistatic Radar Scattering Data" Remote Sensing 11, no. 5: 596. https://doi.org/10.3390/rs11050596
APA StyleYang, Y., Chen, K. -S., & Shang, G. (2019). Surface Parameters Retrieval from Fully Bistatic Radar Scattering Data. Remote Sensing, 11(5), 596. https://doi.org/10.3390/rs11050596