Local Azimuth Ambiguity-to-Signal Ratio Estimation Method Based on the Doppler Power Spectrum in SAR Images


Abstract
:
1. Introduction
2. Local AASR Estimation Method Based on the Doppler Power Spectrum
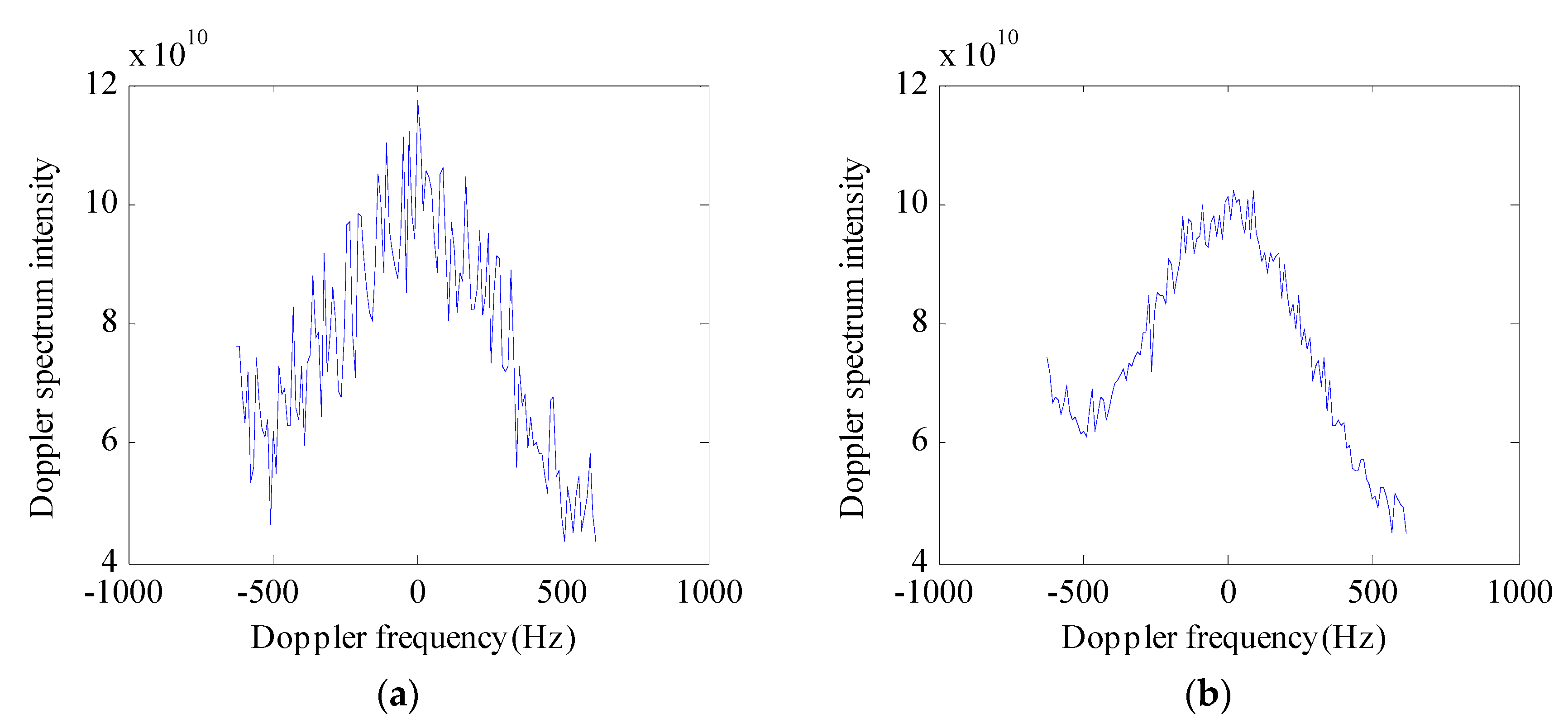
2.1. The Analysis of Local Doppler Power Spectrum Composition
2.2. Methods and Solutions to Estimate the Local AASR from the Doppler Power Spectrum
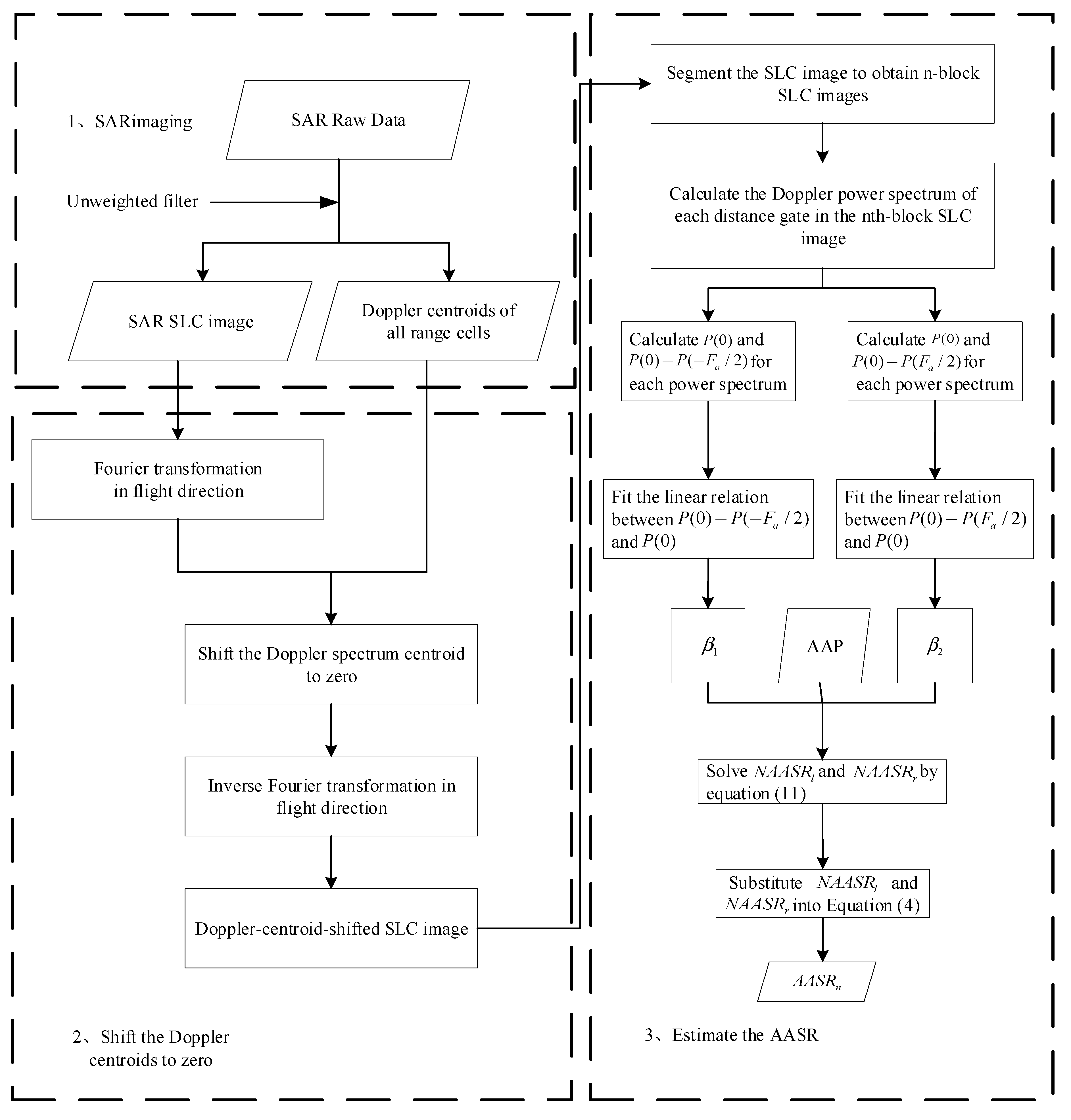
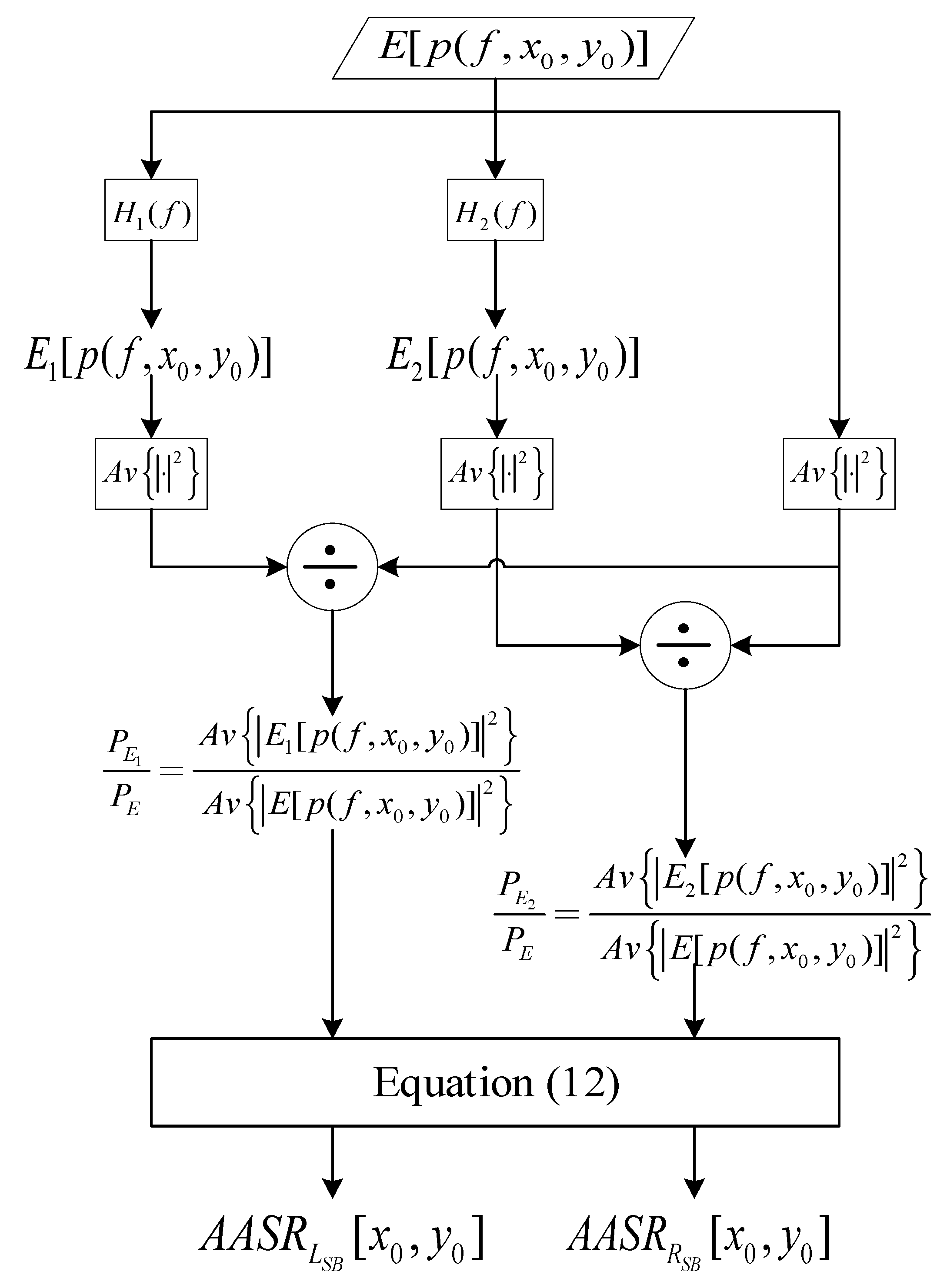
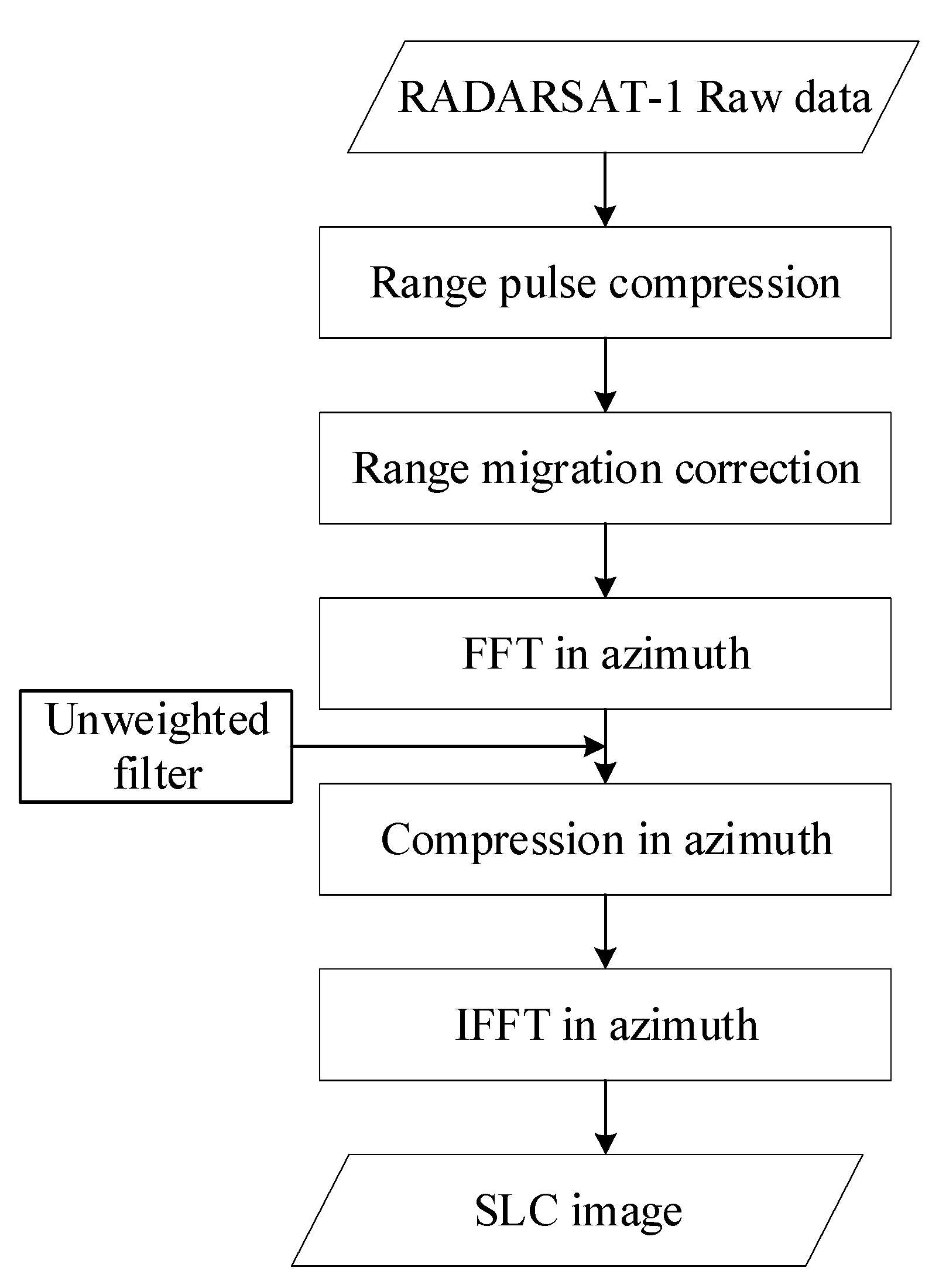
2.3. The Flow Chart of the Proposed Method
3. Verification Based on the Simulation Experiment
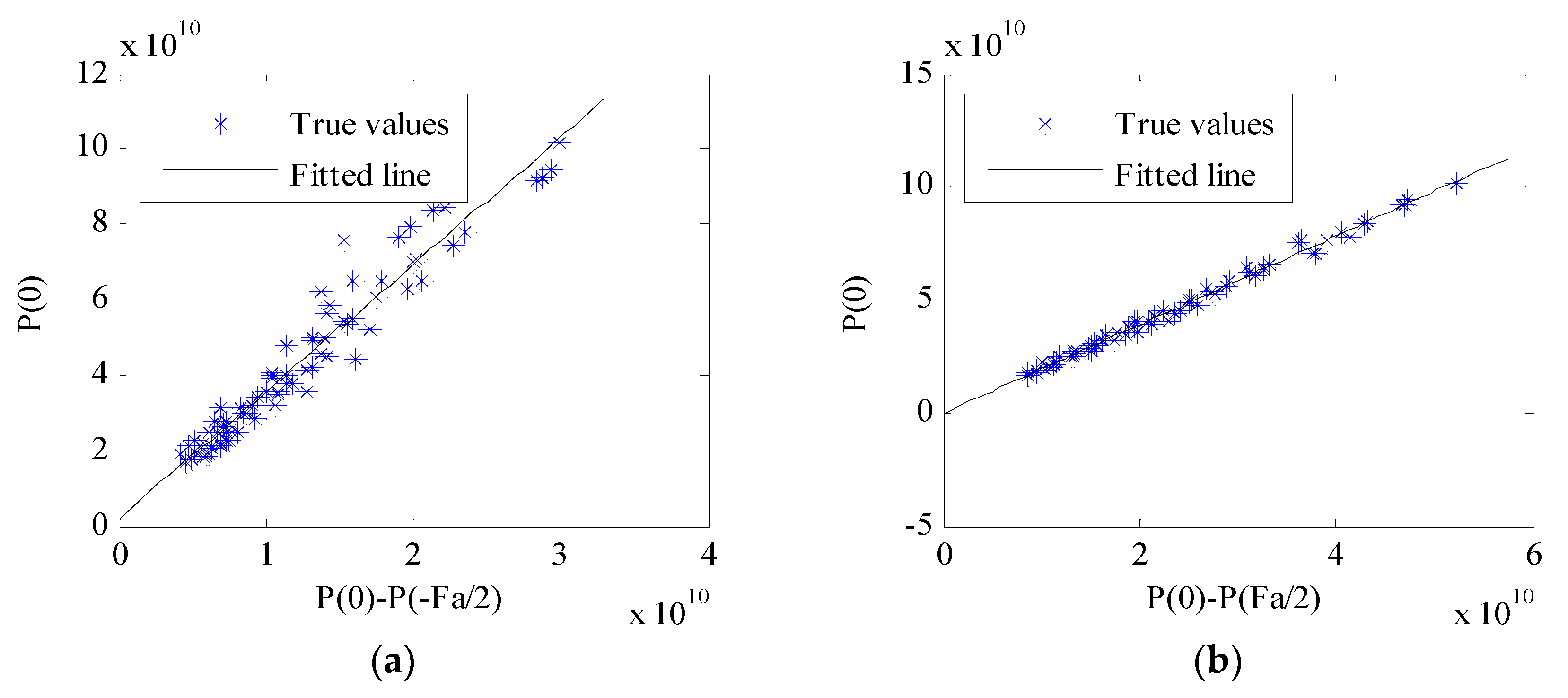
3.1. The Simulation Experiment of the Proposed Method
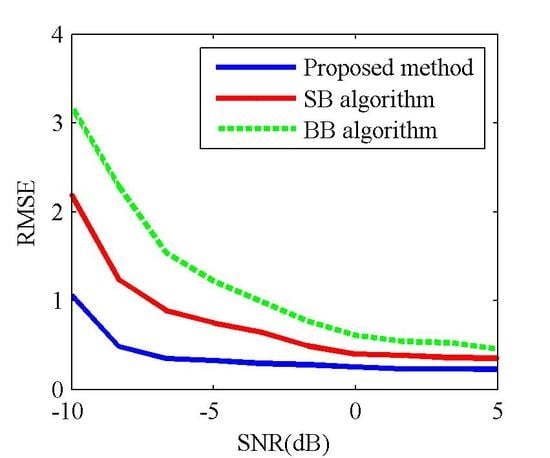
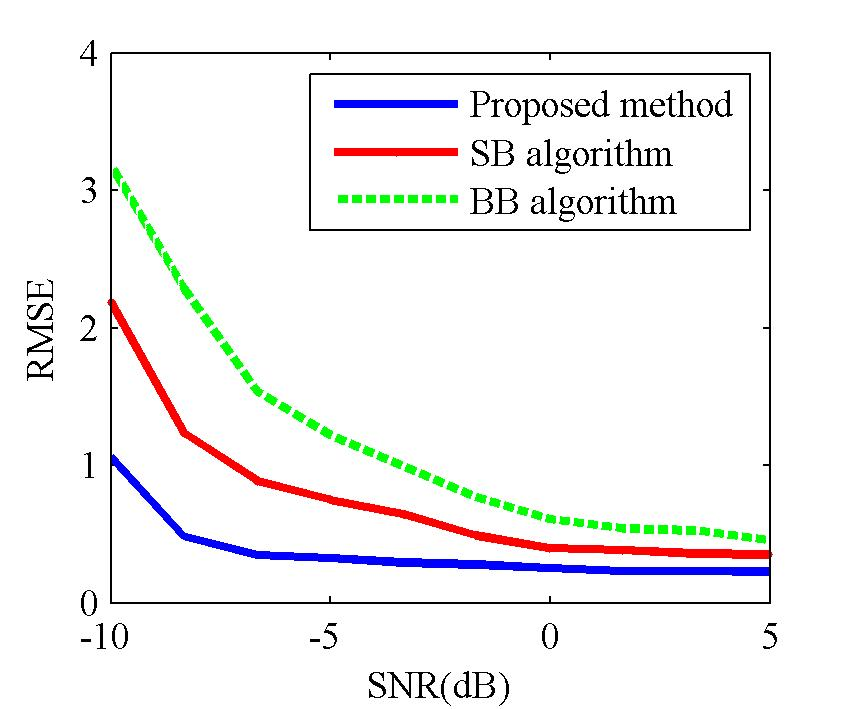
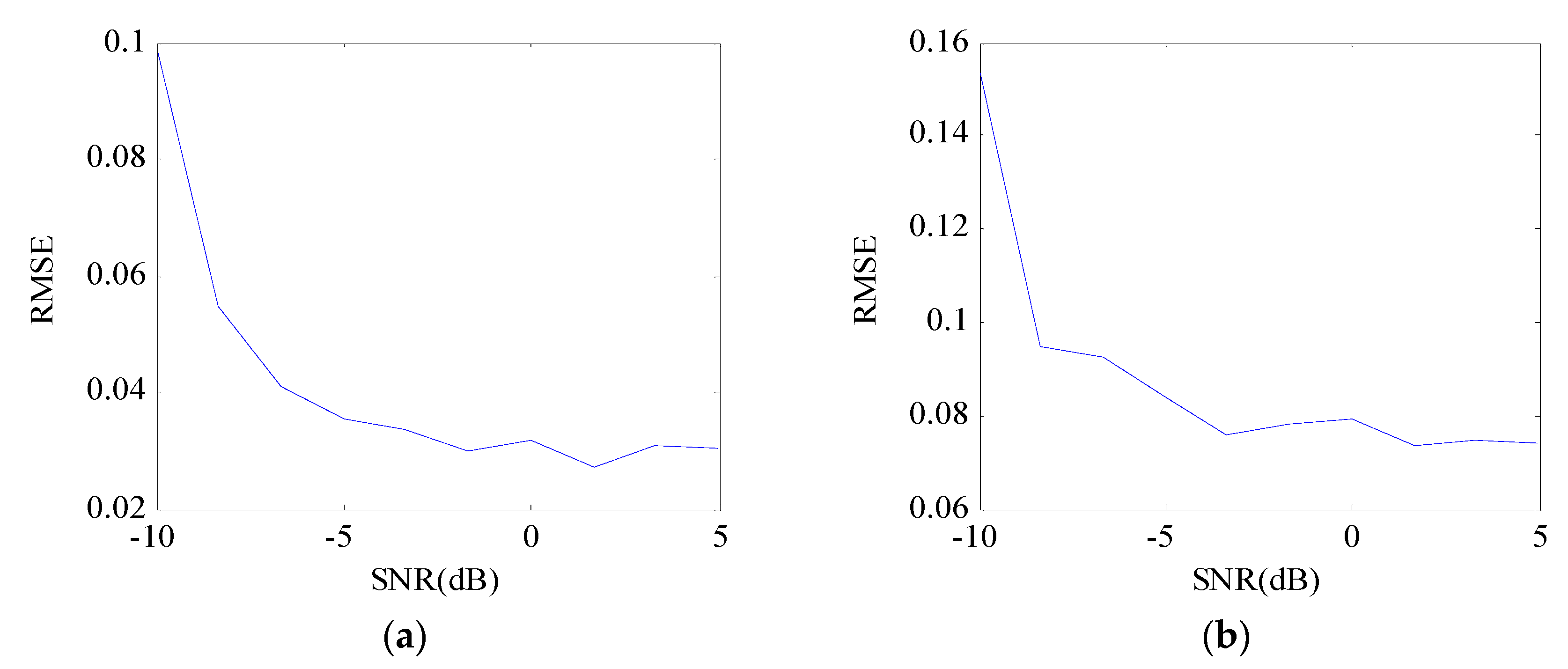
3.2. The Influence of the SNR of SAR Image on Estimation Accuracy
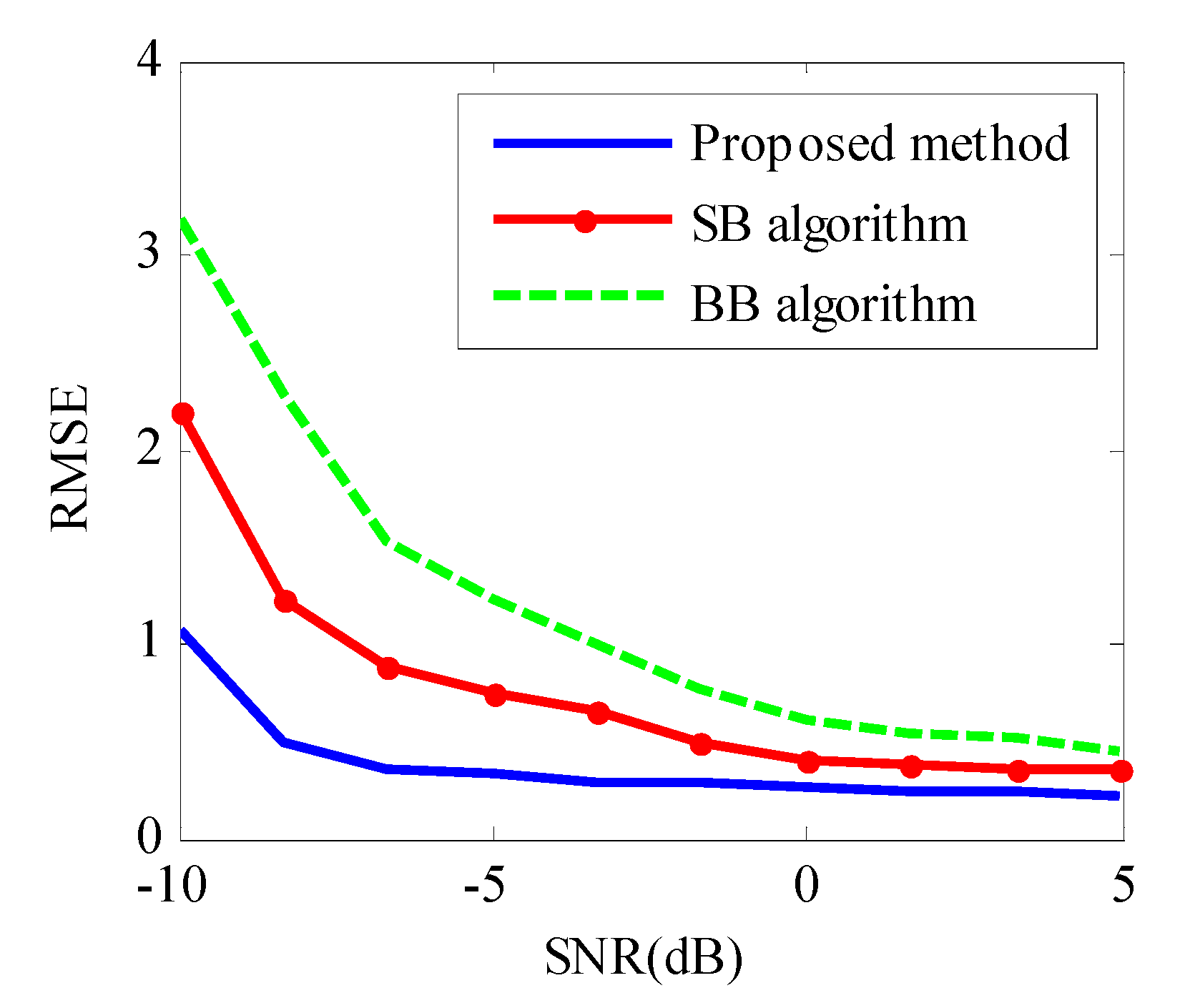
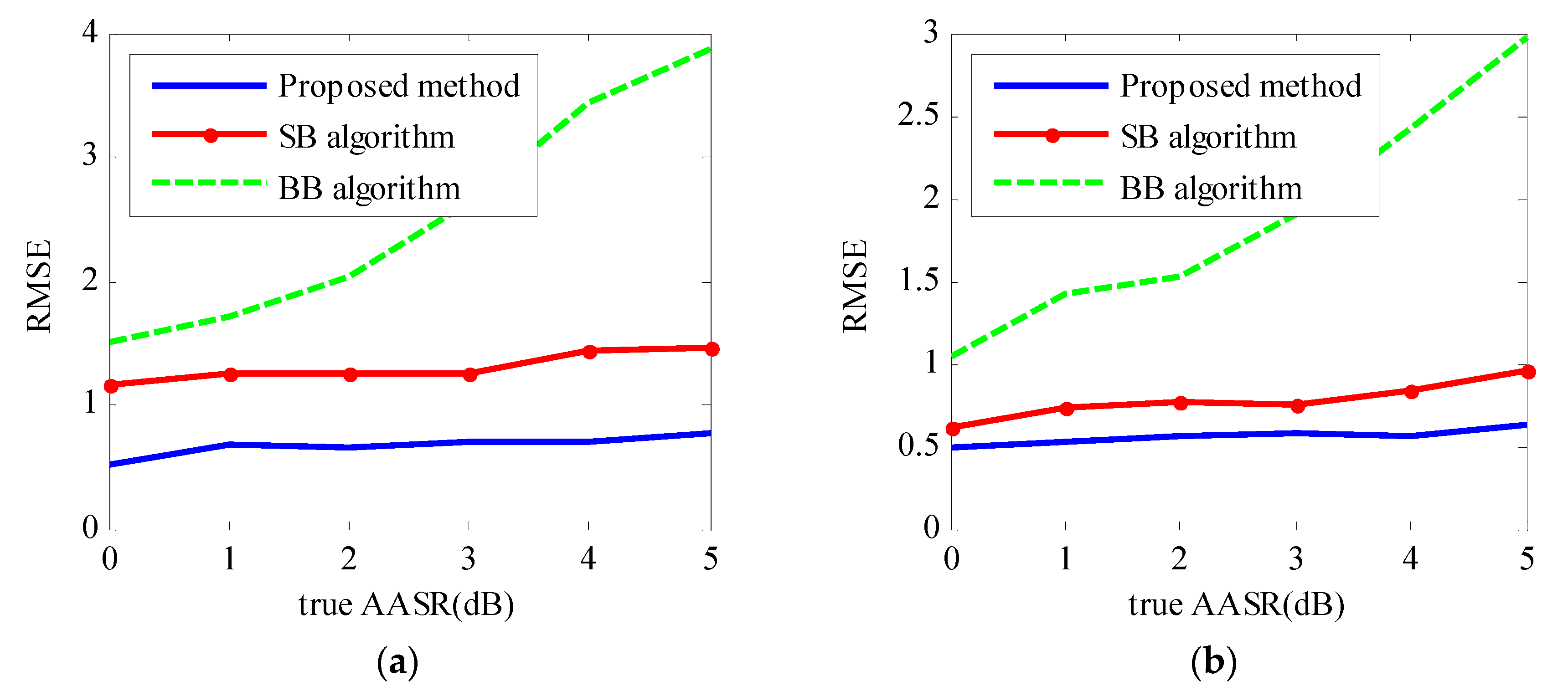
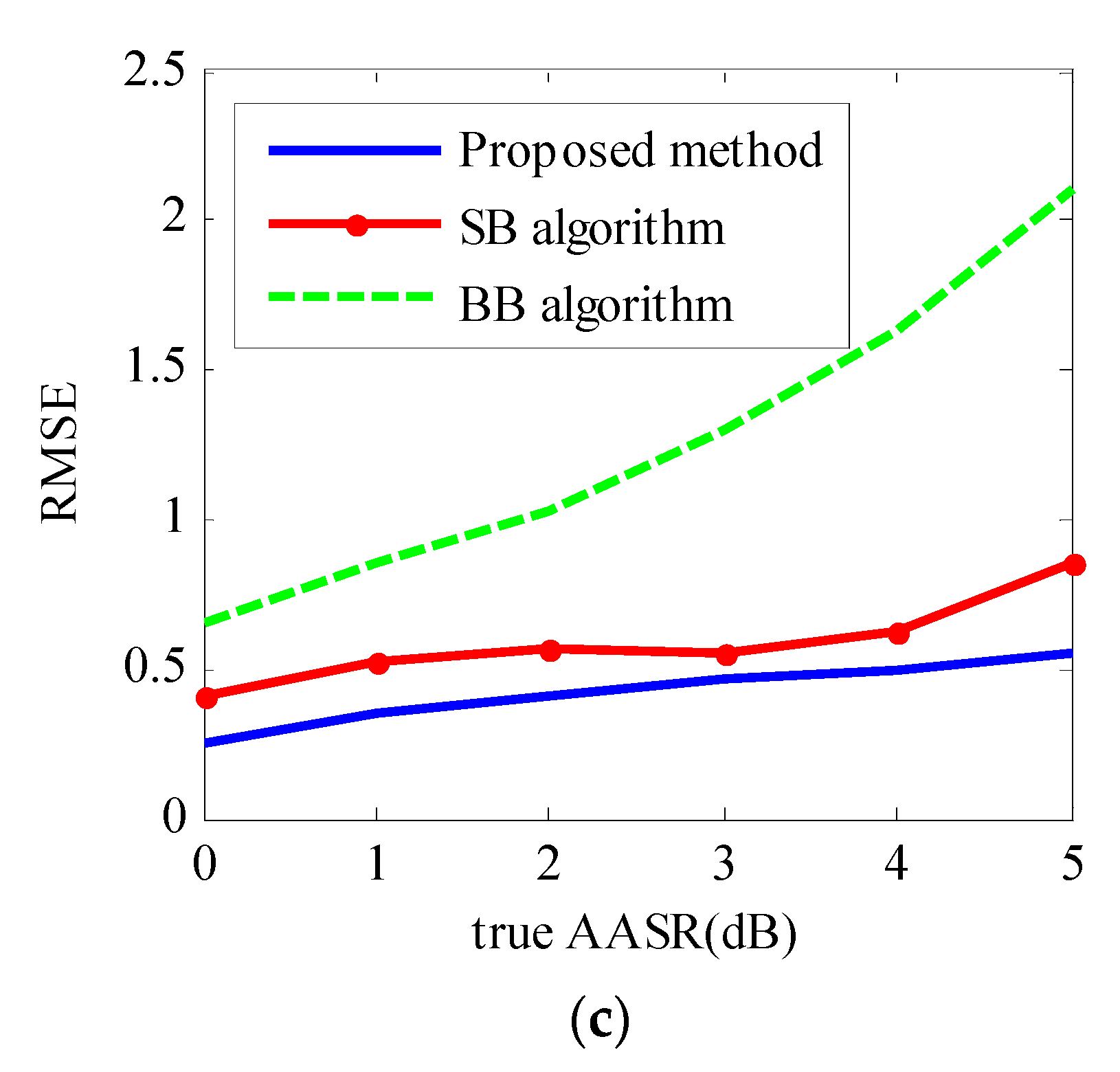
3.3. Comparison of Three Local AASR Estimation Methods
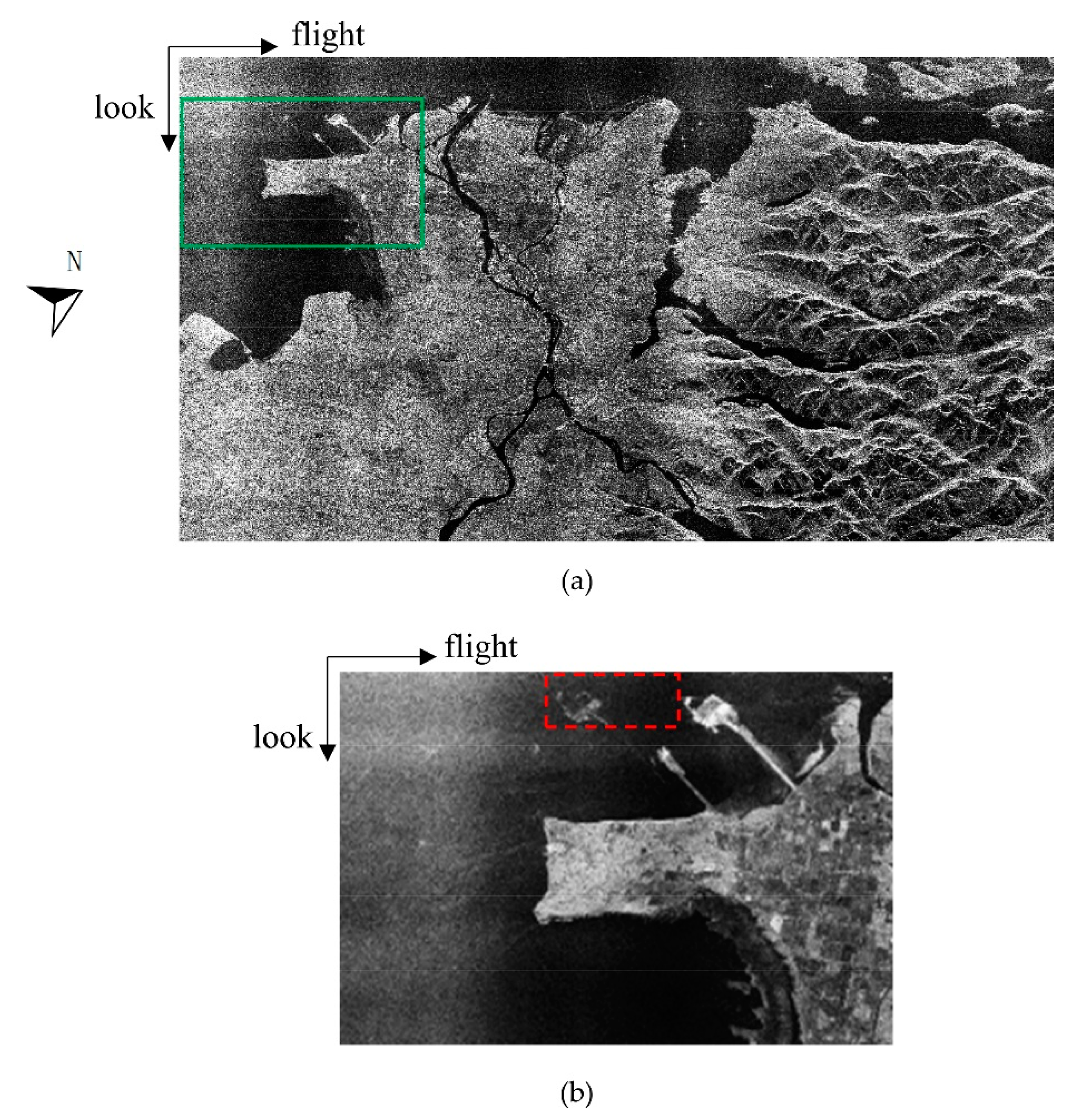
4. Experimental Verification Based on Radarsat-1 Image
5. Discussion
5.1. Applicability Analysis of the Proposed Method
- (1)
- Even in the case of low SNR, the proposed method still has higher estimation accuracy than the traditional AASR estimation algorithms;
- (2)
- The proposed method starts from the original data and can retain the original information of the echo signal to the maximum extent;
- (3)
- The fuzzy source signal does not have to appear in the SAR image.
- (1)
- Since AAP must be known, it is necessary to start from the raw data when performing AASR estimation.
- (2)
- The number of pixels used to calculate the azimuth Doppler power spectrum is large. Therefore, the local AASR resolution of the proposed method is low.
5.1.1. Limitation of Data Selection
5.1.2. Estimated Resolution of AASR
5.2. Sensitivity Analysis of AAP on AASR Estimation Results
5.3. The Application of the Estimated Local AASR
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chen, J.; Iqbal, M.; Yang, W.; Wang, P.B.; Sun, B. Mitigation of azimuth ambiguities in spaceborne stripmap sar images using selective restoration. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4038–4045. [Google Scholar] [CrossRef]
- Li, F.K.; Johnson, W.T.K. Ambiguities in spaceborne synthetic aperture radar systems. IEEE Trans. Aerosp. Electron. Syst. 1983, AES-19, 389–397. [Google Scholar] [CrossRef]
- Tomiyasu, K. Tutorial review of synthetic-aperture radar (sar) with applications to imaging of the ocean surface. Proc. IEEE 1978, 66, 563–583. [Google Scholar] [CrossRef]
- Moreira, A. Suppressing the azimuth ambiguities in synthetic aperture radar images. IEEE Trans. Geosci. Remote Sens. 1993, 31, 885–895. [Google Scholar] [CrossRef]
- Martino, G.D.; Iodice, A.; Riccio, D.; Ruello, G. Filtering of azimuth ambiguity in stripmap synthetic aperture radar images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3967–3978. [Google Scholar] [CrossRef]
- Marino, A.; Sanjuan-Ferrer, M.J.; Hajnsek, I.; Ouchi, K. Ship detection with spectral analysis of synthetic aperture radar: A comparison of new and well-known algorithms. Remote Sens. 2015, 7, 5416–5439. [Google Scholar] [CrossRef]
- Barbarossa, S.; Levrini, G. An antenna pattern synthesis technique for spaceborne sar performance optimization. IEEE Trans. Geosci. Remote Sens. 1991, 29, 254–259. [Google Scholar] [CrossRef]
- Guarnieri, A.M. Adaptive removal of azimuth ambiguities in sar images. IEEE Trans. Geosci. Remote Sens. 2005, 43, 625–633. [Google Scholar] [CrossRef]
- Wu, Y.; Yu, Z.; Xiao, P.; Li, C. Suppression of azimuth ambiguities in spaceborne sar images using spectral selection and extrapolation. IEEE Trans. Geosci. Remote Sens. 2018, 56, 1–14. [Google Scholar] [CrossRef]
- Wang, W.; Wang, R.; Deng, Y.; Xu, W.; Guo, L.; Hou, L. Azimuth ambiguity suppression with an improved reconstruction method based on antenna pattern for multichannel synthetic aperture radar systems. IET Radarsonar Navig. 2015, 9, 492–500. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, Z.S. On suppressing azimuth Ambiguities of Synthetic aperture radar by three filters. In Proceedings of the 2001 CIE International Conference on Radar Proceedings (Cat No.01TH8559), Beijing, China, 15–18 October 2001; pp. 624–626. [Google Scholar]
- Moreira, A.; Misra, T. On the use of the ideal filter concept for improving sar image quality. J. Electromagn. Waves Appl. 1995, 9, 407–420. [Google Scholar]
- Villano, M.; Krieger, G. Spectral-based estimation of the local azimuth ambiguity-to-signal ratio in sar images. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2304–2313. [Google Scholar] [CrossRef]
- Wei, Z. Synthetic Aperture Radar Satellite; Science Press: Beijing, China, 2001. [Google Scholar]
- Massonnet, D.; Souyris, J.-C. Imaging with Synthetic Aperture Radar; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Meng, H.; Wang, X.; Chong, J.; Wei, X.; Kong, W. Doppler spectrum-based nrcs estimation method for low-scattering areas in ocean sar images. Remote Sens. 2017, 9, 219. [Google Scholar] [CrossRef]
- Meng, H.; Wang, X.; Chong, J. An azimuth antenna pattern estimation method based on doppler spectrum in sar ocean images. Sensors 2018, 18, 1081. [Google Scholar] [CrossRef]
- Leng, X.; Ji, K.; Zhou, S.; Zou, H. Azimuth ambiguities removal in littoral zones based on multi-temporal sar images. Remote Sens. 2017, 9, 886. [Google Scholar]
- Liu, M.; Li, Z.; Liu, B. Spaceborne sar azimuth ambiguities removal based on apodization algorithm. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 1003–1006. [Google Scholar]
- Hawkins, R.K.; Teany, L.D.; Srivastava, S.; Tam, S.Y.K. Radarsat precision transponder. Adv. Space Res. 1997, 19, 1455–1465. [Google Scholar] [CrossRef]
- Jackson, H.; Sinclair, I.; Tam, S. Envisat/asar precision transponders. Eur. Space Agency-Publ. -Esa Sp 2000, 450, 311–316. [Google Scholar]
- Bamler, R. Doppler frequency estimation and the cramer-rao bound. IEEE Trans. Geosci. Remote Sens. 1991, 29, 385–390. [Google Scholar] [CrossRef]
- Madsen, S.N. Estimating the doppler centroid of sar data. IEEE Trans. Aerosp. Electron. Syst. 1989, 25, 134–140. [Google Scholar] [CrossRef]
- Chang, C.-Y.; Curlander, J.C. Application of the multiple prf technique to resolve doppler centroid estimation ambiguity for spaceborne sar. IEEE Trans. Geosci. Remote Sens. 1992, 30, 941–949. [Google Scholar] [CrossRef]
- Cumming, I.G.; Wong, F.H. Digital processing of synthetic aperture radar data. Artech House 2005, 1, 3. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parametric Name | Parametric Symbol | Parametric Value |
|---|---|---|
| Number of Doppler spectrum pixels | 128 | |
| Pulse repetition frequency (Hz) | 1256.98 | |
| Simulation repeat number | 800 | |
| Look number of SAR image | 10 | |
| Signal-to-Noise Ratio (dB) | 5 | |
| Platform Velocity (m/s) | 7062 | |
| Antenna Length (m) | 10 | |
| Wavelength (m) | —— | 0.0566 |
| Sampling bandwidth (Hz) | —— | |
| AAP scale factor (Hz) | ||
| Ratio of the NRCS values of the left ambiguity signal and the real target position | 1 | |
| Ratio of the NRCS values of the right ambiguity signal and the real target position | 2 |
| Parameters | True Value | Estimated Value |
|---|---|---|
| 1 | 0.997 | |
| 2 | 1.9125 | |
| −20.53(dB) | −0.94(dB) |
| Estimation Method | Mean of AASR Estimates |
|---|---|
| BB algorithm | −16.01 dB |
| SB algorithm | −16.35 dB |
| Proposed method | −16.57 dB |
| True value | −17 dB |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, H.; Chong, J.; Wang, Y.; Li, Y.; Yan, Z. Local Azimuth Ambiguity-to-Signal Ratio Estimation Method Based on the Doppler Power Spectrum in SAR Images. Remote Sens. 2019, 11, 857. https://doi.org/10.3390/rs11070857
Meng H, Chong J, Wang Y, Li Y, Yan Z. Local Azimuth Ambiguity-to-Signal Ratio Estimation Method Based on the Doppler Power Spectrum in SAR Images. Remote Sensing. 2019; 11(7):857. https://doi.org/10.3390/rs11070857
Chicago/Turabian StyleMeng, Hui, Jinsong Chong, Yuhang Wang, Yan Li, and Zhuofan Yan. 2019. "Local Azimuth Ambiguity-to-Signal Ratio Estimation Method Based on the Doppler Power Spectrum in SAR Images" Remote Sensing 11, no. 7: 857. https://doi.org/10.3390/rs11070857
APA StyleMeng, H., Chong, J., Wang, Y., Li, Y., & Yan, Z. (2019). Local Azimuth Ambiguity-to-Signal Ratio Estimation Method Based on the Doppler Power Spectrum in SAR Images. Remote Sensing, 11(7), 857. https://doi.org/10.3390/rs11070857