Metric Accuracy of Digital Elevation Models from WorldView-3 Stereo-Pairs in Urban Areas



Abstract
:
1. Introduction
2. Materials
3. Methods
3.1. WorldView-3 Image Processing
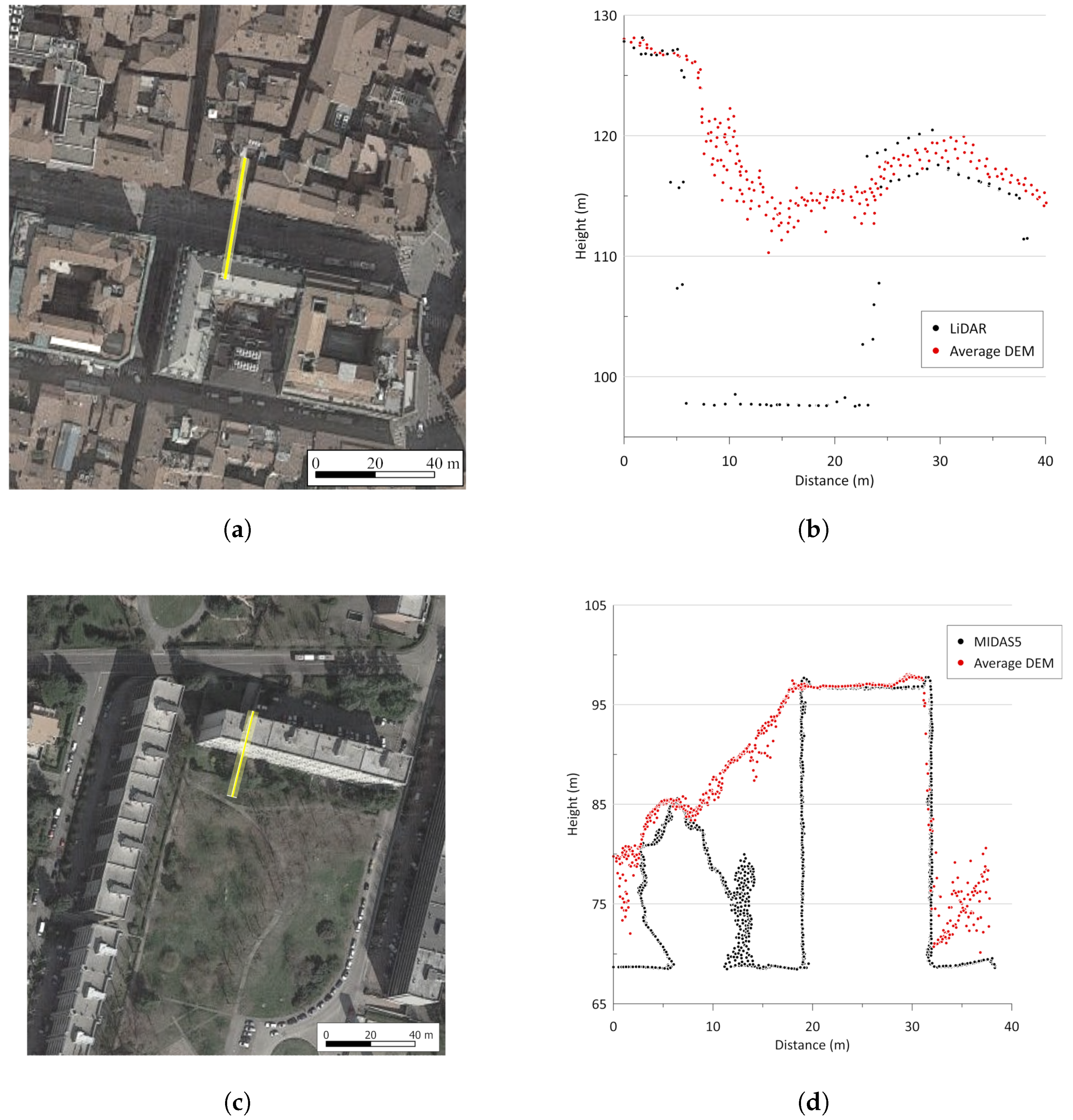
3.2. Validation
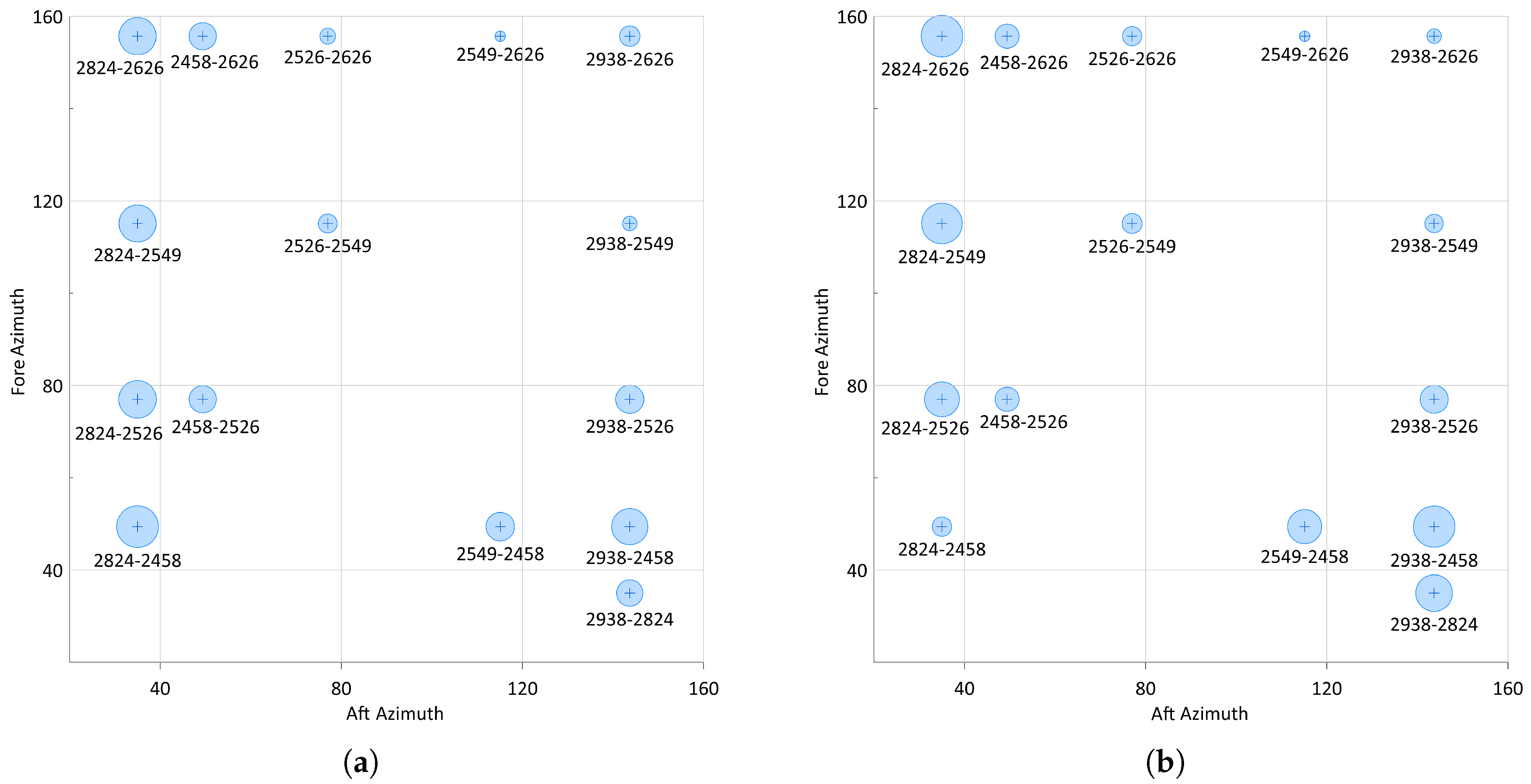
4. Results and Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| BIE | Bisector Elevation Angle |
| DEM | Digital Elevation Model |
| GSD | Ground Sample Distance |
| IQR | Inter-Quartile Range |
| MIDAS5 | Multi-camera Integrated Digital Acquisition System |
| M3C2 | Multiscale Model to Model Comparison |
| NRTK | Network Real-Time Kinematic |
| RMSE | Root Mean Square Error |
| WV3 | WorldView-3 |
References
- Longbotham, N.; Pacifici, F.; Baugh, B.; Camps Valls, G. Prelaunch assessment of WorldView-3 information content. In Proceedings of the 2014 6th Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing (WHISPERS), Lausanne, Switzerland, 24–27 June 2014. [Google Scholar] [CrossRef]
- Satellite Imaging Corporation. WorldView-3 Satellite Sensor. Available online: https://www.satimagingcorp.com/satellite-sensors/worldview-3/ (accessed on 31 January 2019).
- Barazzetti, L.; Roncoroni, F.; Brumana, R.; Previtali, M. Georeferencing accuracy analysis of a single WorldView-3 image collected over Milan. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B1, 429–434. [Google Scholar] [CrossRef]
- Sidike, P.; Sagan, V.; Maimaitijiang, M.; Maimaitiyiming, M.; Shakoor, N.; Burken, J.; Mockler, T.; Fritschi, F.B. dPEN: Deep progressively expanded network for mapping heterogeneous agricultural landscape using WorldView-3 satellite imagery. Remote Sens. Environ. 2019, 221, 756–772. [Google Scholar] [CrossRef]
- Mars, J.C. Mineral and lithologic mapping capability of WorldView 3 data at Mountain Pass, California, using true- and false-color composite images, band ratios, and logical operator algorithms. Econ. Geol. 2018, 113, 1587–1601. [Google Scholar] [CrossRef]
- Zhang, P.; Ke, Y.; Zhang, Z.; Wang, M.; Li, P.; Zhang, S. Urban land use and land cover classification using novel deep learning models based on high spatial resolution satellite imagery. Sensors 2018, 18, 3717. [Google Scholar] [CrossRef] [PubMed]
- Parente, C.; Pepe, M. Bathymetry from WorldView-3 satellite data using radiometric band ratio. Acta Polytech. 2018, 58, 109. [Google Scholar] [CrossRef]
- Aguilar, M.A.; Nemmaoui, A.; Aguilar, F.J.; Qin, R. Quality assessment of digital surface models extracted from WorldView-2 and WorldView-3 stereo pairs over different land covers. GISci. Remote Sens. 2018, 56, 109–129. [Google Scholar] [CrossRef]
- Hu, F.; Gao, X.M.; Li, G.Y.; Li, M. DEM extraction from WorldView-3 stereo-images and accuracy evaluation. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B1, 327–332. [Google Scholar] [CrossRef]
- Capaldo, P.; Crespi, M.; Fratarcangeli, F.; Nascetti, A.; Pieralice, F. DSM generation from high resolution imagery: Applications with WorldView-1 and Geoeye-1. Ital. J. Remote Sens. 2012, 44, 41–53. [Google Scholar] [CrossRef]
- Rupnik, E.; Pierrot Deseilligny, M.; Delorme, A. 3D reconstruction from multi-view VHR-satellite images in MicMac. ISPRS J. Photogramm. Remote Sens. 2018, 139, 201–211. [Google Scholar] [CrossRef]
- Aguilar, M.A.; del Mar Saldana, M.; Aguilar, F.J. Generation and quality assessment of stereo-extracted DSM from GeoEye-1 and WorldView-2 imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1259–1271. [Google Scholar] [CrossRef]
- Hirschmuller, H. Stereo processing by semiglobal matching and mutual information. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 328–341. [Google Scholar] [CrossRef] [PubMed]
- Bethmann, F.; Luhmann, T. Semi-global matching in object space. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-3/W2, 23–30. [Google Scholar] [CrossRef]
- Topcon Positioning Italy. NetGEO. Available online: http://www.netgeo.it/ (accessed on 31 January 2018).
- Dabove, P.; De, M.; Manzino, A. Achievable positioning accuracies in a network of GNSS reference stations. In Global Navigation Satellite Systems: Signal, Theory and Applications; InTech: London, UK, 2012. [Google Scholar] [CrossRef]
- Africani, P.; Bitelli, G.; Lambertini, A.; Minghetti, A.; Paselli, E. Integration of LiDAR data into a municipal GIS to study solar radiation. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-1/W1, 1–6. [Google Scholar] [CrossRef]
- Bitelli, G.; Girelli, V.A.; Lambertini, A. Integrated use of remote sensed data and numerical cartography for the generation of 3D city models. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-2, 97–102. [Google Scholar] [CrossRef]
- Li, R.; Niu, X.; Liu, C.; Wu, B.; Deshpande, S. Impact of imaging geometry on 3D geopositioning accuracy of stereo Ikonos imagery. Photogramm. Eng. Remote Sens. 2009, 75, 1119–1125. [Google Scholar] [CrossRef]
- Jeong, J.; Kim, T. Quantitative estimation and validation of the effects of the convergence, bisector elevation, and asymmetry angles on the positioning accuracies of satellite stereo pairs. Photogramm. Eng. Remote Sens. 2016, 82, 625–633. [Google Scholar] [CrossRef]
- Jeong, J.; Kim, T. Analysis of dual-sensor stereo geometry and its positioning accuracy. Photogramm. Eng. Remote Sens. 2014, 80, 653–661. [Google Scholar] [CrossRef]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D comparison of complex topography with terrestrial laser scanner: Application to the Rangitikei canyon (N-Z). ISPRS J. Photogramm. Remote Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef] [Green Version]
- Gómez Gutiérrez, A.; de Sanjosé Blasco, J.; Lozano Parra, J.; Berenguer Sempere, F.; de Matías Bejarano, J. Does HDR pre-processing improve the accuracy of 3D models obtained by means of two conventional SfM-MVS software packages? the case of the Corral del Veleta rock glacier. Remote Sens. 2015, 7, 10269–10294. [Google Scholar] [CrossRef]
- Conte, P.; Girelli, V.A.; Mandanici, E. Structure from motion for aerial thermal imagery at city scale: Pre-processing, camera calibration, accuracy assessment. ISPRS J. Photogramm. Remote Sens. 2018, 146, 320–333. [Google Scholar] [CrossRef]
- Piermattei, L.; Marty, M.; Karel, W.; Ressl, C.; Hollaus, M.; Ginzler, C.; Pfeifer, N. Impact of the acquisition geometry of very high-resolution Pléiades imagery on the accuracy of canopy height models over forested alpine regions. Remote Sens. 2018, 10, 1542. [Google Scholar] [CrossRef]
- Franci, F.; Lambertini, A.; Bitelli, G. Integration of different geospatial data in urban areas: A case of study. In Proceedings Volume 9229, Second International Conference on Remote Sensing and Geoinformation of the Environment (RSCy2014), Paphos, Cyprus, 12 August 2014; Hadjimitsis, D.G., Themistocleous, K., Michaelides, S., Papadavid, G., Eds.; SPIE: Bellingham, WA, USA, 2014. [Google Scholar] [CrossRef]
- Biljecki, F.; Stoter, J.; Ledoux, H.; Zlatanova, S.; Çöltekin, A. Applications of 3D City Models: State of the Art Review. ISPRS Int. J. Geo-Inf. 2015, 4, 2842–2889. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image | Catalogue ID | Date | Time (UTC) | Off-Nadir (deg) | Raw GSD (m) |
|---|---|---|---|---|---|
| 2938 | 104001003222B500 | 14 Sep 2017 | 10:29:38 | 18.5 | 0.34 |
| 2824 | 1040010032519A00 | 14 Sep 2017 | 10:28:24 | 32.9 | 0.43 |
| 2526 | 1040010033212F00 | 20 Sep 2017 | 10:25:26 | 22.0 | 0.35 |
| 2626 | 10400100348FBD00 | 20 Sep 2017 | 10:26:26 | 31.4 | 0.41 |
| 2549 | 1040010033D35E00 | 20 Sep 2017 | 10:24:58 | 20.8 | 0.35 |
| 2458 | 104001003248B400 | 20 Sep 2017 | 10:25:49 | 30.9 | 0.41 |
| Pair | Convergence | BIE | Asymmetry | |
|---|---|---|---|---|
| 2938 | 2824 | 46.6 | 71.4 | 10.2 |
| 2526 | 2626 | 37.5 | 66.1 | 8.8 |
| 2549 | 2458 | 31.6 | 65.2 | 10.5 |
| 2824 | 2458 | 8.6 | 54.9 | 10.3 |
| 2938 | 2526 | 24.4 | 71.0 | 3.4 |
| 2938 | 2626 | 15.4 | 62.3 | 26.3 |
| 2824 | 2526 | 23.8 | 61.3 | 16.5 |
| 2824 | 2549 | 38.7 | 66.1 | 10.8 |
| 2824 | 2626 | 61.0 | 70.4 | 0.9 |
| 2938 | 2458 | 40.6 | 70.0 | 9.5 |
| 2458 | 2526 | 16.5 | 61.5 | 18.6 |
| 2458 | 2626 | 54.1 | 67.5 | 0.5 |
| 2526 | 2549 | 15.1 | 67.6 | 2.0 |
| 2549 | 2626 | 22.5 | 62.5 | 16.4 |
| 2938 | 2549 | 10.8 | 68.8 | 5.1 |
| Centre (WV3-Lidar) | Fair (WV3-Lidar) | Corticella (WV3-MIDAS5) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Overall | Roofs | Roads | Overall | Roofs | Roads | Overall | Roofs | Roads | |
| Points | 3,258,420 | 1,598,139 | 617,660 | 2,711,801 | 555,437 | 427,552 | 14,637,983 | 1,258,766 | 2,020,506 |
| Mean | 2.76 | 0.61 | 6.06 | 1.83 | 0.93 | 1.55 | 3.40 | 3.27 | 3.58 |
| STD | 5.39 | 3.19 | 6.65 | 4.91 | 4.54 | 4.13 | 5.18 | 5.29 | 5.08 |
| Min | −74.04 | −74.04 | −38.47 | −81.86 | −58.46 | −65.49 | −30.35 | −30.35 | −22.98 |
| 5th perc. | −2.22 | −1.73 | −2.62 | −2.82 | −1.66 | −2.15 | −2.12 | −0.5 | −1.56 |
| Median | 0.34 | −0.22 | 5.38 | 0.25 | -0.09 | 0.18 | 1.72 | 1.10 | 1.70 |
| IQR | 5.65 | 0.98 | 10.21 | 3.11 | 0.68 | 2.26 | 5.07 | 3.46 | 4.97 |
| 95th perc. | 13.84 | 7.05 | 17.61 | 10.89 | 9.17 | 10.21 | 13.69 | 14.53 | 13.90 |
| Max | 71.93 | 52.78 | 71.93 | 79.00 | 69.24 | 35.67 | 37.00 | 31.76 | 37.00 |
| Overall | Roofs | Roads | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Median | IQR | Completeness | Median | IQR | Completeness | Median | IQR | Completeness | |
| Convergence | 0.10 | 0.02 | 0.97 | 0.00 | 0.21 | 0.98 | 0.08 | 0.41 | 0.92 |
| BIE | 0.33 | 0.18 | 0.29 | 0.28 | 0.36 | 0.30 | 0.02 | 0.21 | 0.24 |
| Asymmetry | 0.05 | 0.00 | 0.14 | 0.09 | 0.00 | 0.19 | 0.01 | 0.07 | 0.06 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mandanici, E.; Girelli, V.A.; Poluzzi, L. Metric Accuracy of Digital Elevation Models from WorldView-3 Stereo-Pairs in Urban Areas. Remote Sens. 2019, 11, 878. https://doi.org/10.3390/rs11070878
Mandanici E, Girelli VA, Poluzzi L. Metric Accuracy of Digital Elevation Models from WorldView-3 Stereo-Pairs in Urban Areas. Remote Sensing. 2019; 11(7):878. https://doi.org/10.3390/rs11070878
Chicago/Turabian StyleMandanici, Emanuele, Valentina A. Girelli, and Luca Poluzzi. 2019. "Metric Accuracy of Digital Elevation Models from WorldView-3 Stereo-Pairs in Urban Areas" Remote Sensing 11, no. 7: 878. https://doi.org/10.3390/rs11070878
APA StyleMandanici, E., Girelli, V. A., & Poluzzi, L. (2019). Metric Accuracy of Digital Elevation Models from WorldView-3 Stereo-Pairs in Urban Areas. Remote Sensing, 11(7), 878. https://doi.org/10.3390/rs11070878