A Framework for Estimating Clear-Sky Atmospheric Total Precipitable Water (TPW) from VIIRS/S-NPP



Abstract
:1. Introduction
2. Data
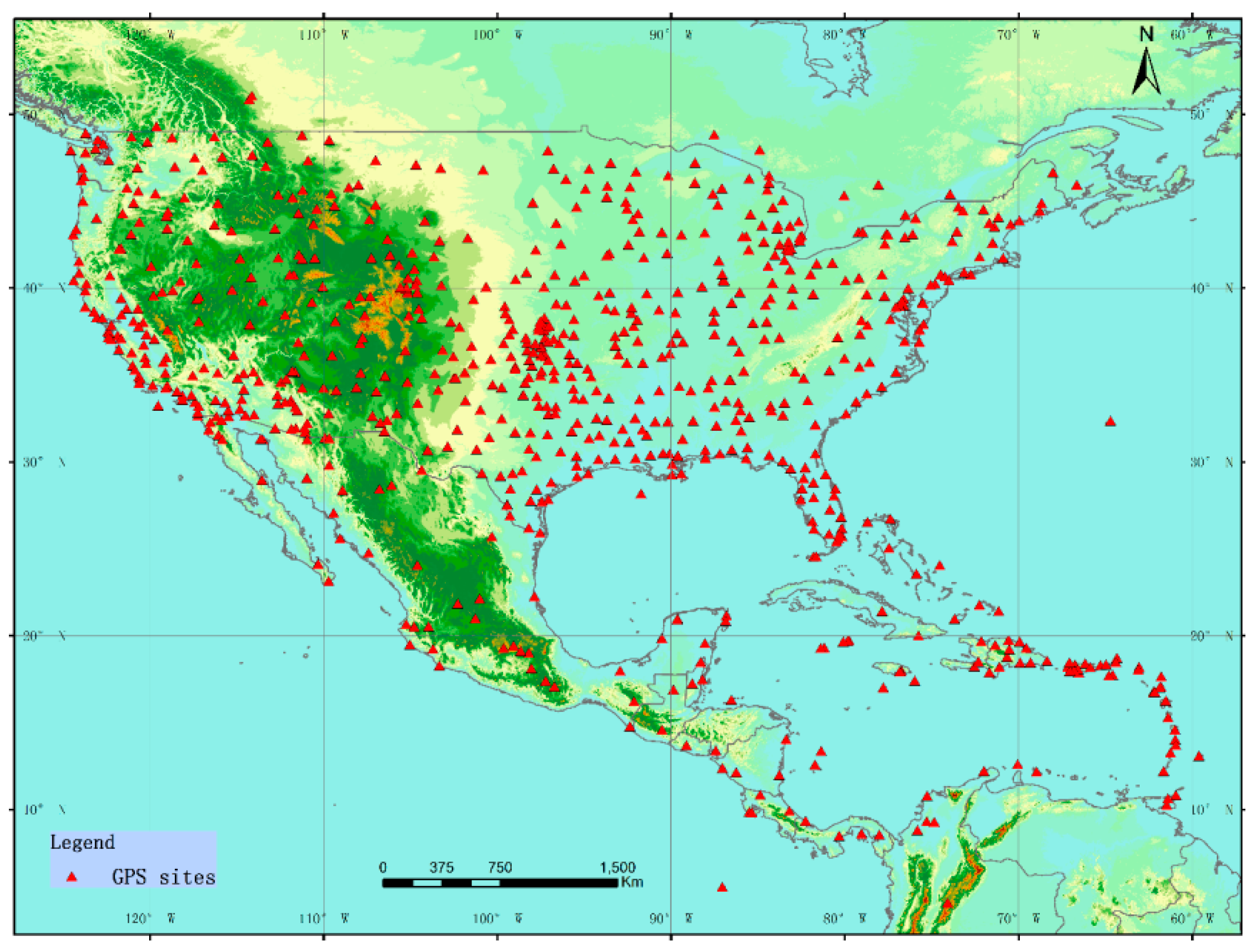
2.1. SuomiNet
2.2. The Joint Polar Satellite System (JPSS) Microwave Integrated Retrieval System (MIRS) Precipitation Product
2.3. Visible Infrared Imaging Radiometer Suite (VIIRS)
2.4. Seebor Atmosphere Profile
3. Methods
3.1. Split-Window Covariance-Variance Ratio Method
- (1)
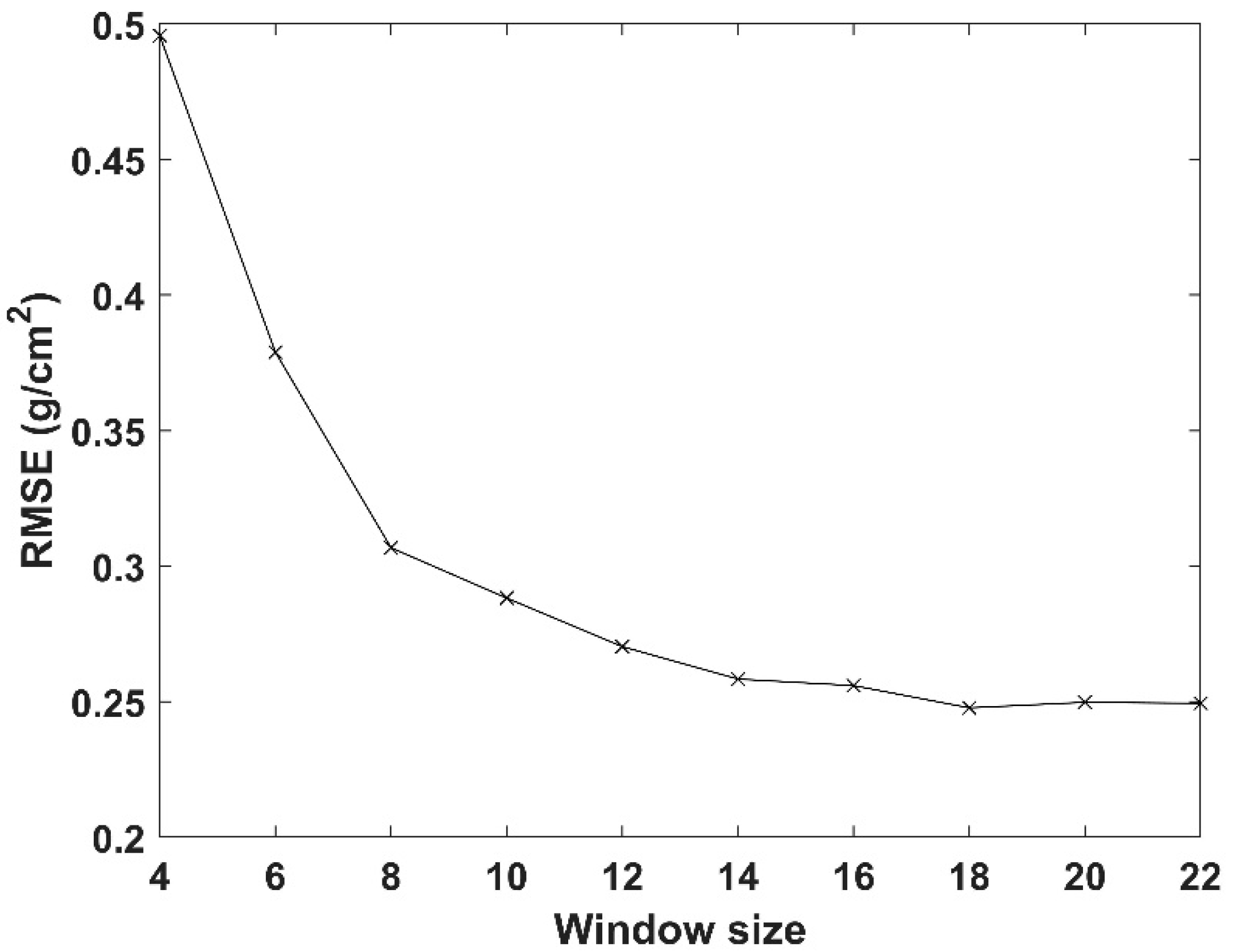
- Calculate the mean values of TOA brightness temperature and . Herein, the median values and are used instead of the mean values, as the median is a more robust estimator than the mean value.
- (2)
- Remove the cloudy pixels. The VIIRS cloud mask product is used to identify the cloudy pixels, and only confidently clear pixels are used to calculate .
- (3)
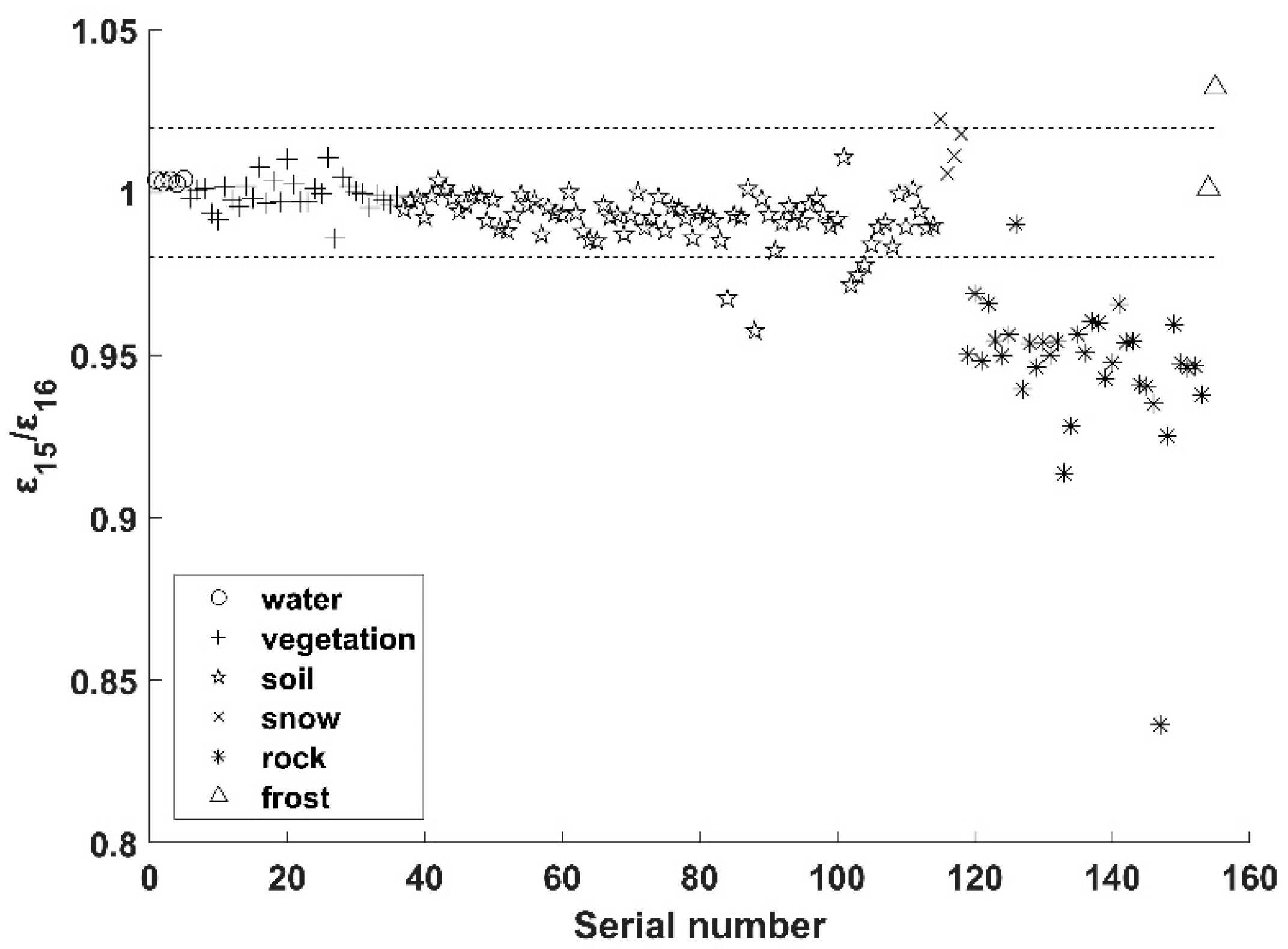
- Eliminate the invalid pixels. Since (at 12 μm) is smaller than (at 11 µm) and the ratio of emissivities is very close to unity for most conditions, should be smaller than unity. The absolute value of must be larger than the absolute value of and the values of and should have the same sign. Eliminating the invalid pixel can effectively avoid invalid inversion of transmittance ratios (i.e., a transmittance ratio lager than 1). For more details, please refer to Li et al. [23].
- (4)
- Estimate and reject if is less than 0.95.
- (5)
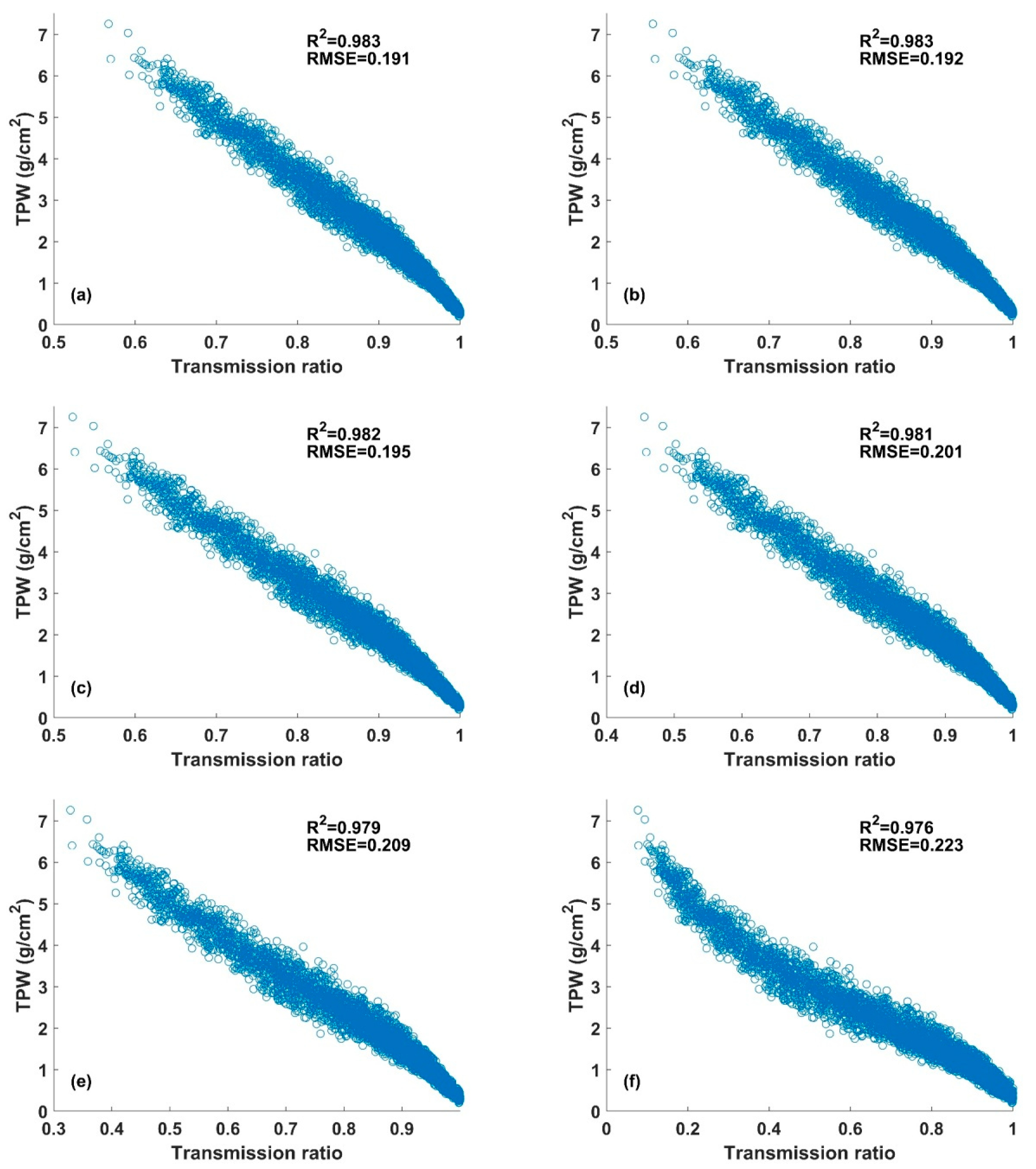
- Calculate the TPW for different view zenith angles. The relationship between TPW and the transmission ratio is established at several specific angles. When the view zenith angle is not equal to the specific angles, TPW is linearly interpolated from TPWs predicted by the model with an adjacent view zenith angle. View zenith angles exceeding 75° are not considered.
3.2. Bayesian Model Averaging
4. Results
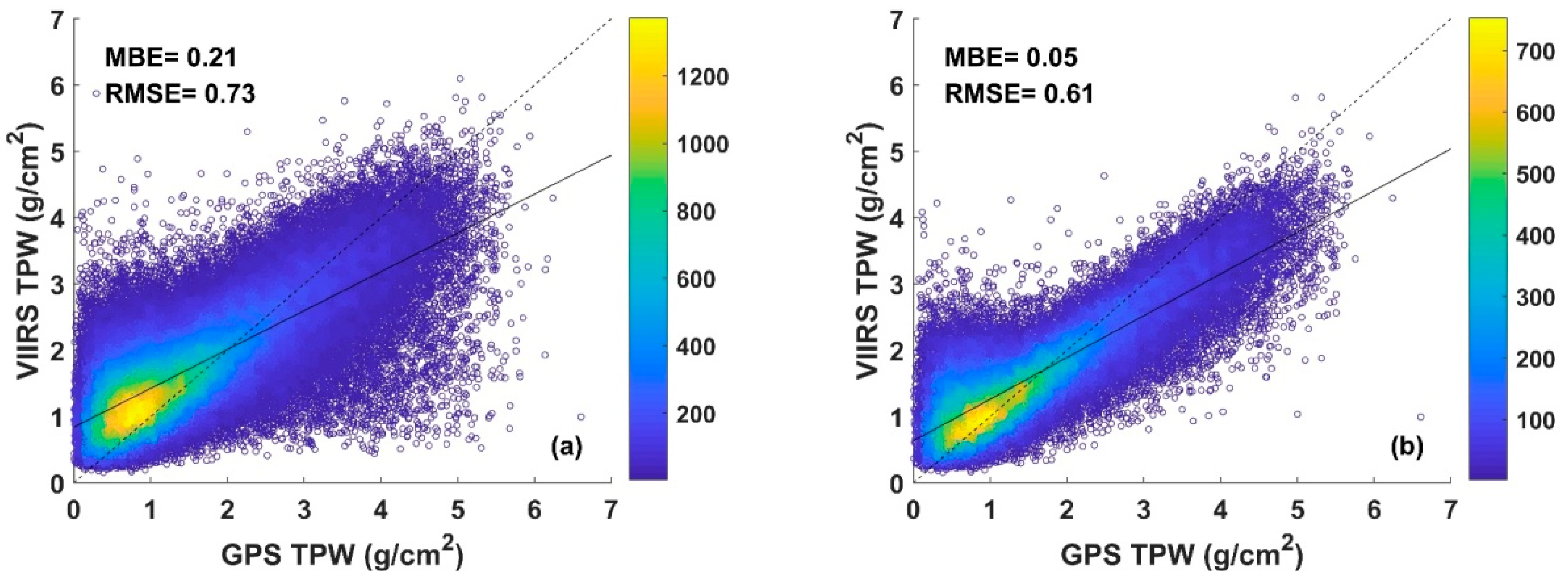
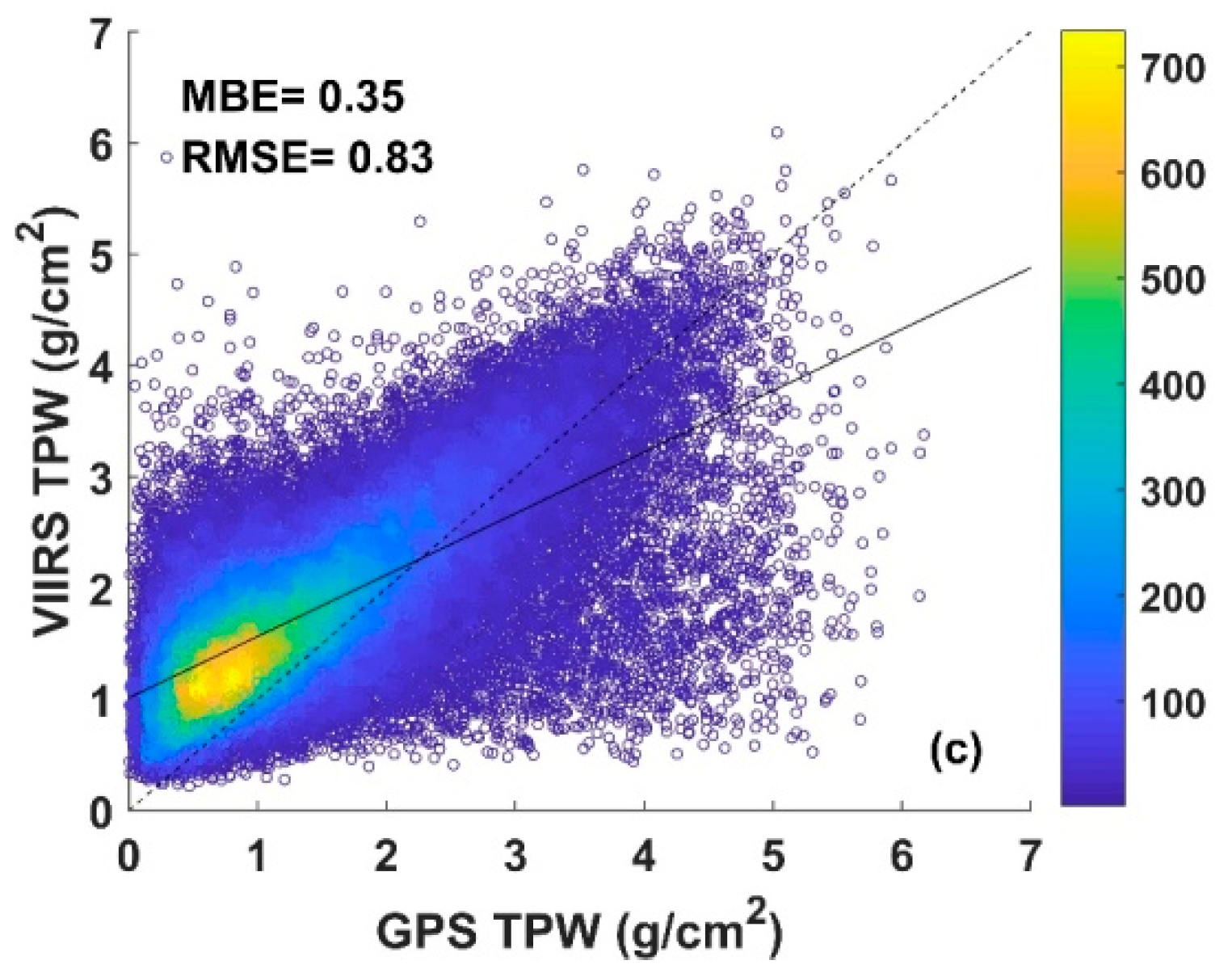
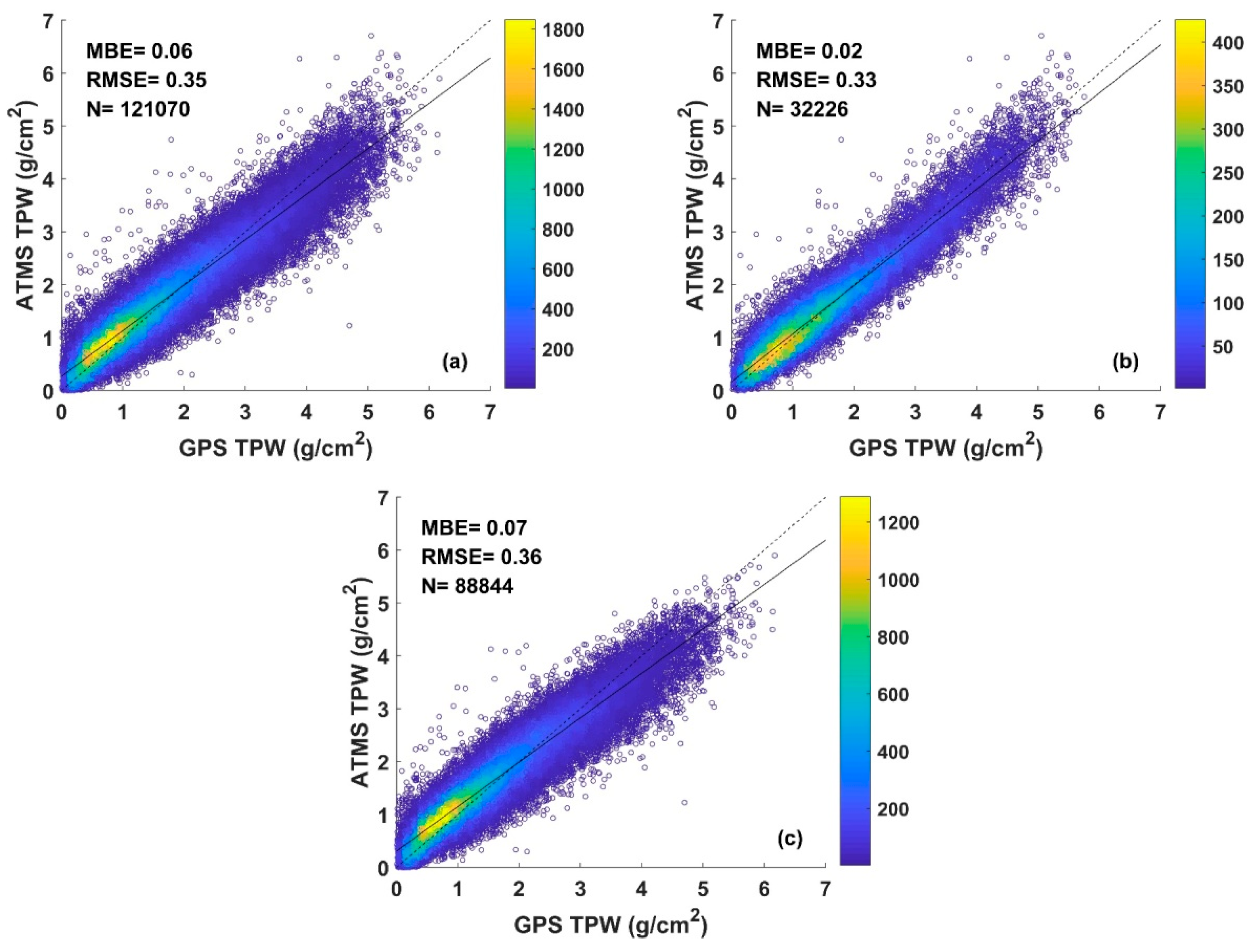
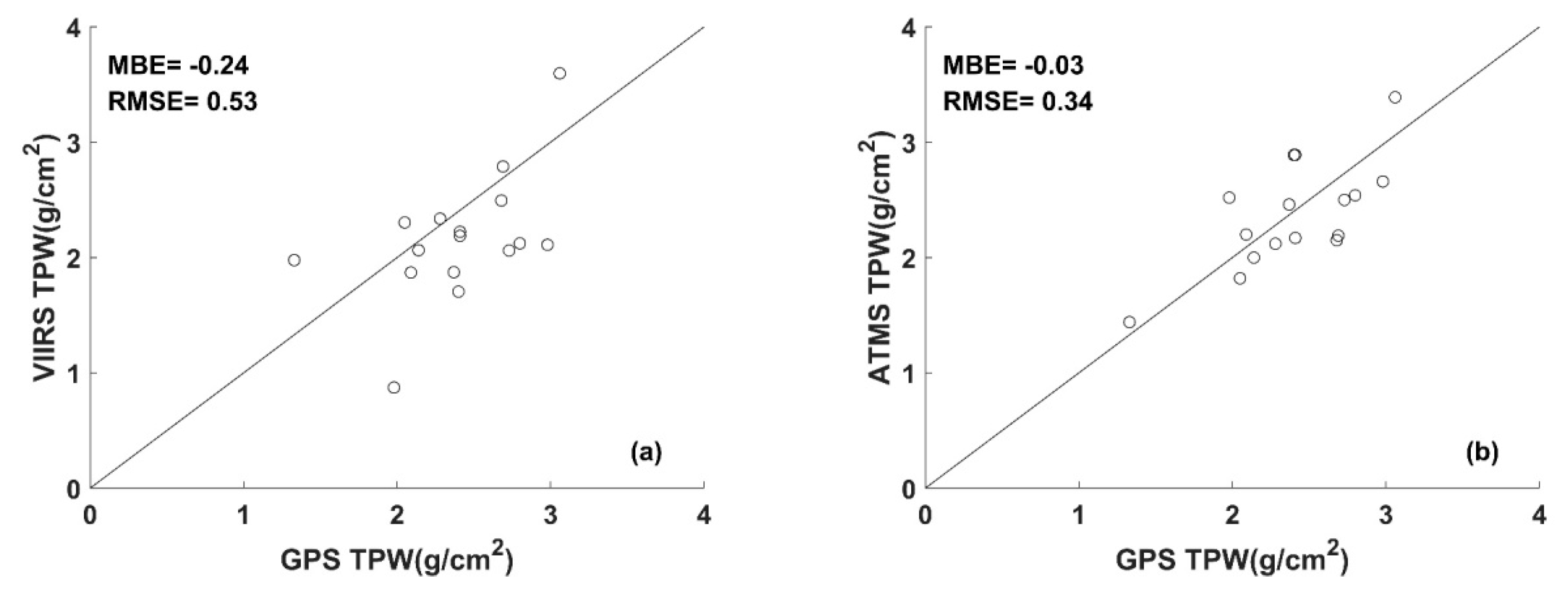
4.1. Validating VIIRS TPW and MIRS-Derived TPW
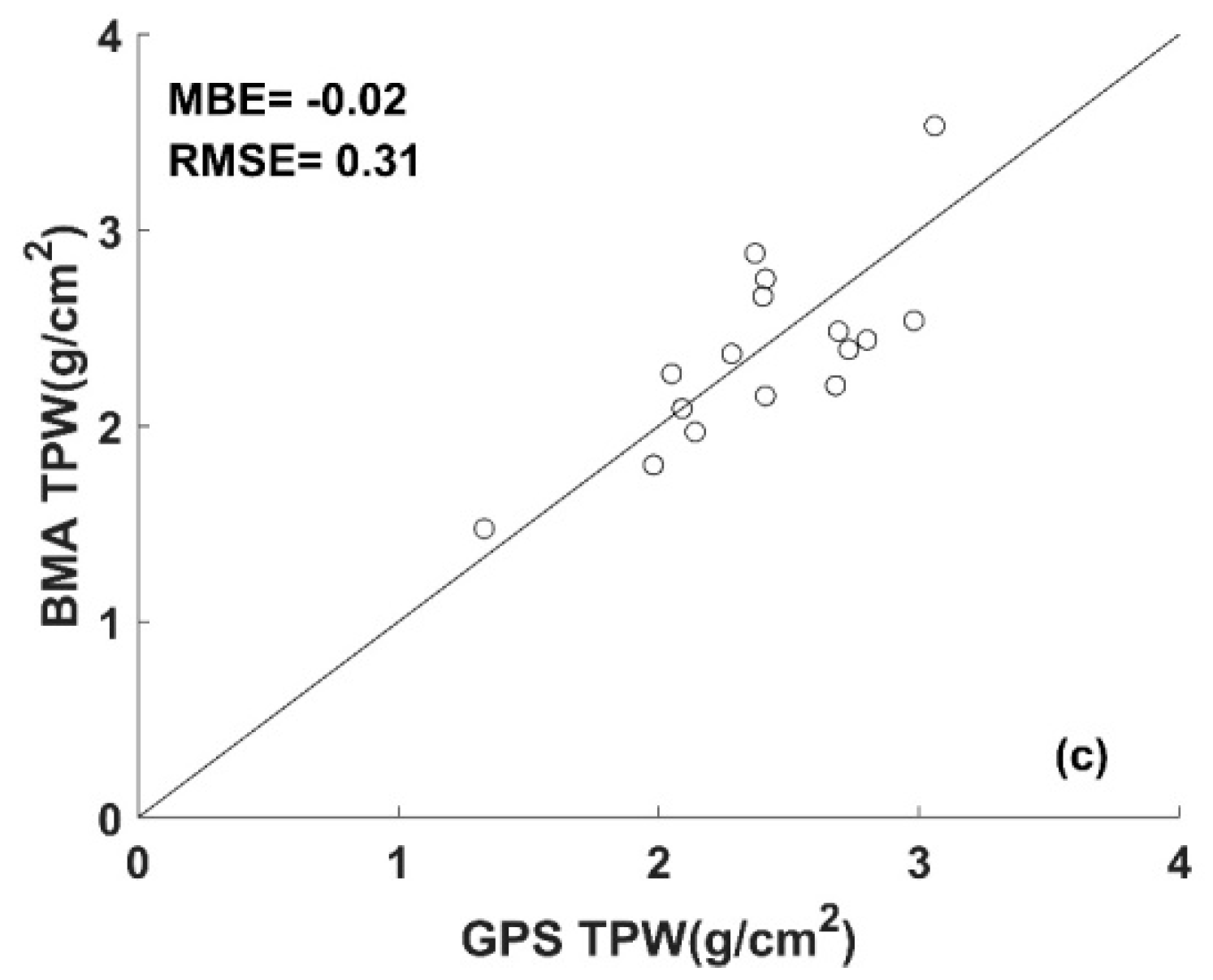
4.2. Blending TPWs Using BMA
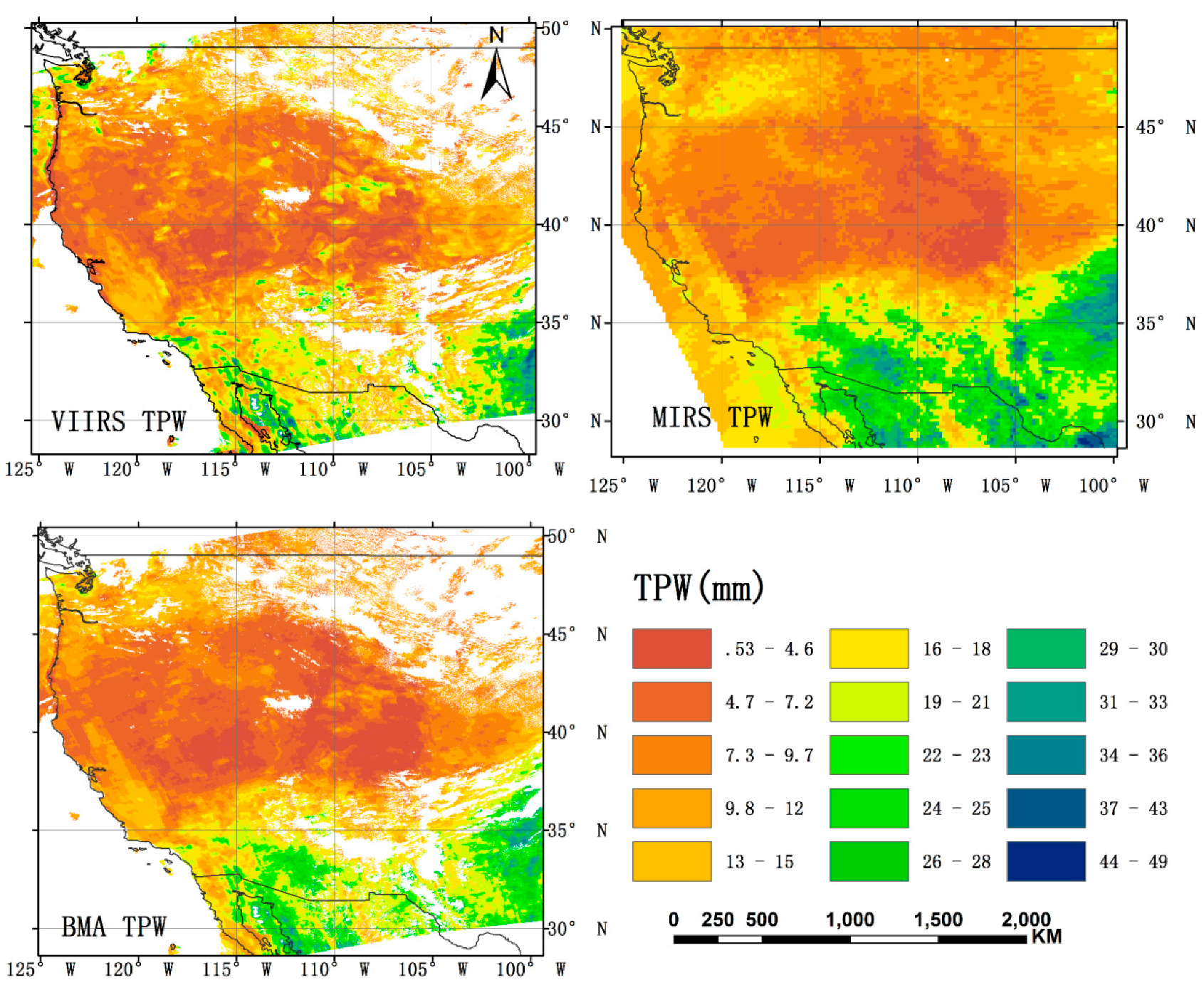
4.3. Production of VIIRS TPW
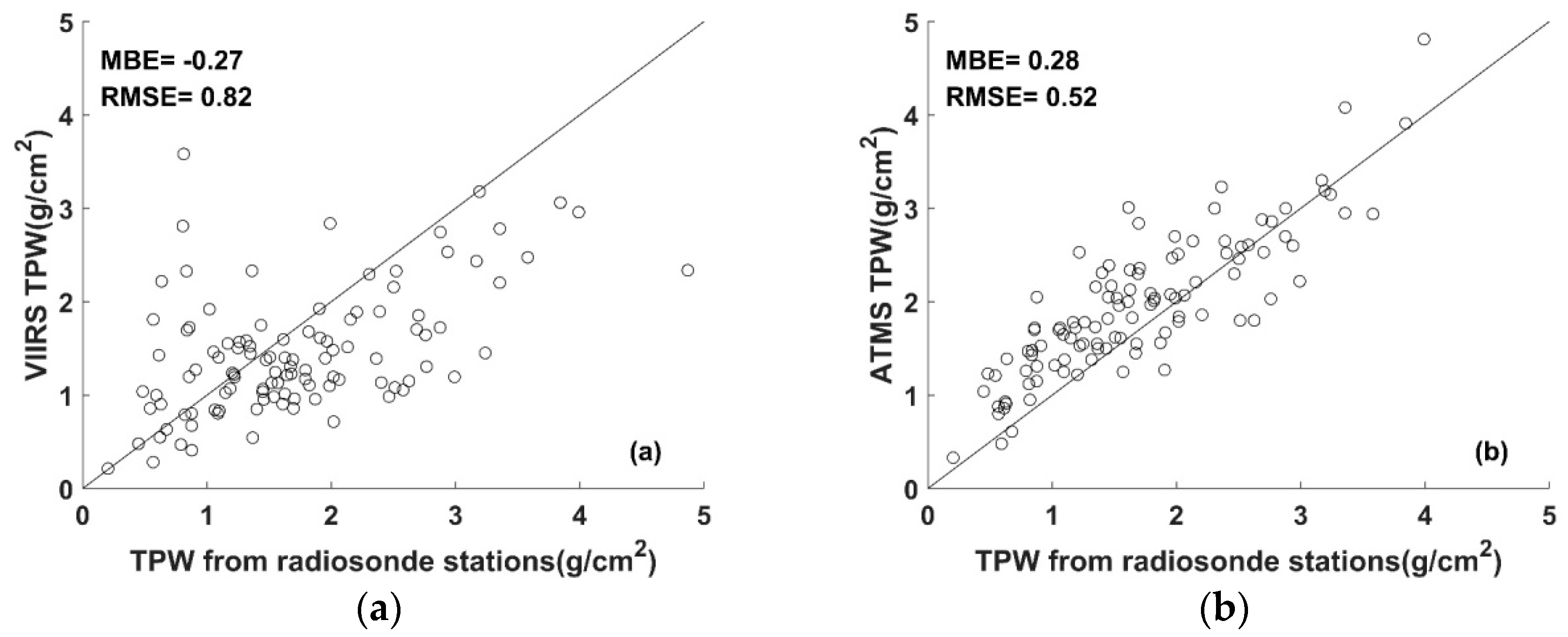
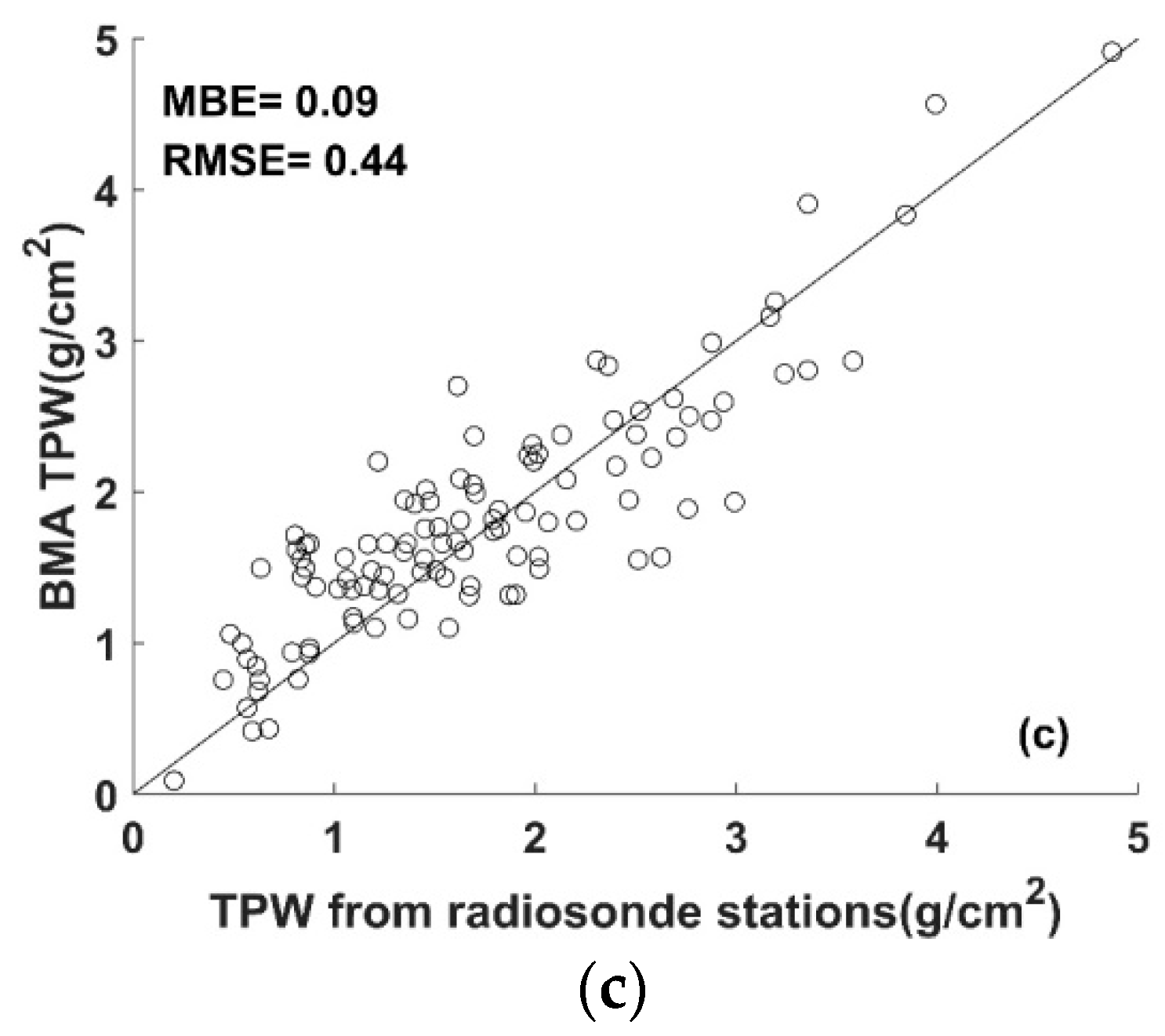
4.4. Validating BMA Integrated TPW Using Radiosonde Measurements
5. Discussion
5.1. SWCVR
5.2. The Limitations of this Study
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lindstrot, R.; Stengel, M.; Schröder, M.; Fischer, J.; Preusker, R.; Schneider, N.; Steenbergen, T. A global climatology of total columnar water vapour from ssm/i and meris. Earth Syst. Sci. Data 2014, 6, 221–233. [Google Scholar] [CrossRef]
- Bosilovich, M.G.; Schubert, S.D. Water vapor tracers as diagnostics of the regional hydrologic cycle. J. Hydrometeorol. 2002, 3, 149–165. [Google Scholar] [CrossRef]
- Sellers, P.; Dickinson, R.; Randall, D.; Betts, A.; Hall, F.; Berry, J.; Collatz, G.; Denning, A.; Mooney, H.; Nobre, C. Modeling the exchanges of energy, water, and carbon between continents and the atmosphere. Science 1997, 275, 502–509. [Google Scholar] [CrossRef]
- Soden, B.J.; Wetherald, R.T.; Stenchikov, G.L.; Robock, A. Global cooling after the eruption of mount pinatubo: A test of climate feedback by water vapor. Science 2002, 296, 727–730. [Google Scholar] [CrossRef] [PubMed]
- Elliott, W.P.; Gaffen, D.J. On the utility of radiosonde humidity archives for climate studies. Bull. Am. Meteorol. Soc. 1991, 72, 1507–1520. [Google Scholar] [CrossRef]
- Han, Y.; Snider, J.; Westwater, E.; Melfi, S.; Ferrare, R. Observations of water vapor by ground-based microwave radiometers and raman lidar. J. Geophys. Res. Atmos. 1994, 99, 18695–18702. [Google Scholar] [CrossRef]
- Whiteman, D.; Evans, K.; Demoz, B.; Starr, D.O.C.; Eloranta, E.; Tobin, D.; Feltz, W.; Jedlovec, G.; Gutman, S.; Schwemmer, G. Raman lidar measurements of water vapor and cirrus clouds during the passage of hurricane bonnie. J. Geophys. Res. Atmos. 2001, 106, 5211–5225. [Google Scholar] [CrossRef]
- Ware, R.H.; Fulker, D.W.; Stein, S.A.; Anderson, D.N.; Avery, S.K.; Clark, R.D.; Droegemeier, K.K.; Kuettner, J.P.; Minster, J.B.; Sorooshian, S. Suominet: A real-time national gps network for atmospheric research and education. Bull. Am. Meteorol. Soc. 2000, 81, 677–694. [Google Scholar] [CrossRef]
- Gao, B.C.; Kaufman, Y.J. Water vapor retrievals using moderate resolution imaging spectroradiometer (modis) near-infrared channels. J. Geophys. Res. Atmos. 2003, 108, D13. [Google Scholar] [CrossRef]
- Gao, B.; Goetz, A.; Westwater, E.R.; Conel, J.; Green, R. Possible near-ir channels for remote sensing precipitable water vapor from geostationary satellite platforms. J. Appl. Meteorol. 1993, 32, 1791–1801. [Google Scholar] [CrossRef]
- Kleidman, R.G.; Kaufman, Y.J.; Gao, B.C.; Remer, L.A.; Brackett, V.G.; Ferrare, R.A.; Browell, E.V.; Ismail, S. Remote sensing of total precipitable water vapor in the near-ir over ocean glint. Geophys. Res. Lett. 2000, 27, 2657–2660. [Google Scholar] [CrossRef]
- Wang, J.; Wilheit, T.; Chang, L. Retrieval of total precipitable water using radiometric measurements near 92 and 183 ghz. J. Appl. Meteorol. 1989, 28, 146–154. [Google Scholar] [CrossRef]
- Alishouse, J.C.; Snyder, S.A.; Vongsathorn, J.; Ferraro, R.R. Determination of oceanic total precipitable water from the ssm/i. IEEE Trans. Geosci. Remote Sens. 1990, 28, 811–816. [Google Scholar] [CrossRef]
- Du, J.; Kimball, J.S.; Jones, L.A. Satellite microwave retrieval of total precipitable water vapor and surface air temperature over land from amsr2. IEEE Trans. Geosci. Remote Sens. 2015, 53, 2520–2531. [Google Scholar] [CrossRef]
- Aires, F.; Bernardo, F.; Prigent, C. Atmospheric water-vapour profiling from passive microwave sounders over ocean and land. Part I: Methodology for the megha-tropiques mission. Q. J. R. Meteorol. Soc. 2013, 139, 852–864. [Google Scholar] [CrossRef]
- Grody, N.; Zhao, J.; Ferraro, R.; Weng, F.; Boers, R. Determination of precipitable water and cloud liquid water over oceans from the noaa 15 advanced microwave sounding unit. J. Geophys. Res. Atmos. 2001, 106, 2943–2953. [Google Scholar] [CrossRef]
- Kleespies, T.J.; McMillin, L.M. Retrieval of precipitable water from observations in the split window over varying surface temperatures. J. Appl. Meteorol. 1990, 29, 851–862. [Google Scholar] [CrossRef]
- Chesters, D.; Robinson, W.D.; Uccellini, L.W. Optimized retrievals of precipitable water from the vas “split window”. J. Clim. Appl. Meteorol. 1987, 26, 1059–1066. [Google Scholar] [CrossRef]
- Andersen, H.S. Estimation of precipitable water vapour from noaa-avhrr data during the hapex sahel experiment. Int. J. Remote Sens. 1996, 17, 2783–2801. [Google Scholar] [CrossRef]
- Seemann, S.W.; Li, J.; Menzel, W.P.; Gumley, L.E. Operational retrieval of atmospheric temperature, moisture, and ozone from modis infrared radiances. J. Appl. Meteorol. 2003, 42, 1072–1091. [Google Scholar] [CrossRef]
- Jedlovec, G.J. Precipitable water estimation from high-resolution split window radiance measurements. J. Appl. Meteorol. 1990, 29, 863–877. [Google Scholar] [CrossRef]
- Sobrino, J.A.; Li, Z.-L.; Stoll, M.P.; Becker, F. Improvements in the split-window technique for land surface temperature determination. IEEE Trans. Geosci. Remote Sens. 1994, 32, 243–253. [Google Scholar] [CrossRef]
- Li, Z.-L.; Jia, L.; Su, Z.; Wan, Z.; Zhang, R. A new approach for retrieving precipitable water from atsr2 split-window channel data over land area. Int. J. Remote Sens. 2003, 24, 5095–5117. [Google Scholar] [CrossRef]
- Barducci, A.; Guzzi, D.; Marcoionni, P.; Pippi, I. Algorithm for the retrieval of columnar water vapor from hyperspectral remotely sensed data. Appl. Opt. 2004, 43, 5552–5563. [Google Scholar] [CrossRef]
- Hagan, D.; Webster, C.; Farmer, C.; May, R.; Herman, R.; Weinstock, E.; Christensen, L.; Lait, L.; Newman, P.A. Validating airs upper atmosphere water vapor retrievals using aircraft and balloon in situ measurements. Geophys. Res. Lett. 2004, 31, 21. [Google Scholar] [CrossRef]
- Ji, D.; Shi, J.; Xiong, C.; Wang, T.; Zhang, Y. A total precipitable water retrieval method over land using the combination of passive microwave and optical remote sensing. Remote Sens. Environ. 2017, 191, 313–327. [Google Scholar] [CrossRef]
- Wang, M.; He, G.; Zhang, Z.; Wang, G.; Long, T. NDVI-based split-window algorithm for precipitable water vapour retrieval from Landsat-8 TIRS data over land area. Remote Sens. Lett. 2015, 6, 904–913. [Google Scholar] [CrossRef]
- Ren, H.; Du, C.; Liu, R.; Qin, Q.; Yan, G.; Li, Z.L.; Meng, J. Atmospheric water vapor retrieval from landsat 8 thermal infrared images. J. Geophys. Res. Atmos. 2015, 120, 1723–1738. [Google Scholar] [CrossRef]
- Zhou, S.; Cheng, J. Estimation of high spatial-resolution clear-sky land surface-upwelling longwave radiation from viirs/s-npp data. Remote Sens. 2018, 10, 253. [Google Scholar] [CrossRef]
- Cheng, J.; Liang, S.; Wang, W.; Guo, Y. An efficient hybrid method for estimating clear-sky surface downward longwave radiation from modis data. J. Geophys. Res. Atmos. 2017, 122, 2616–2630. [Google Scholar] [CrossRef]
- Cheng, J.; Liang, S. Global estimates for high spatial resolution clear-sky land surface upwelling longwave radiation from modis data. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4115–4129. [Google Scholar] [CrossRef]
- Cheng, J.; Yang, F.; Guo, Y. A comparative study of bulk parameterization schemes for estimating cloudy-sky surface downward longwave radiation. Remote Sens. 2019, 11, 528. [Google Scholar] [CrossRef]
- Guo, Y.; Cheng, J.; Liang, S. Comprehensive assessment of parameterization methods for estimating clear-sky surface downward longwave radiation. Theor. Appl. Climatol. 2019, 135, 1045–1058. [Google Scholar] [CrossRef]
- Guo, Y.; Cheng, J. Feasibility of estimating cloudy-sky surface longwave net radiation using satellite-derived surface shortwave net radiation. Remote Sens. 2018, 10, 596. [Google Scholar] [CrossRef]
- Ware, R.; Braun, J.; Ha, S.; Hunt, D.; Kuo, Y.; Rocken, C.; Sleziak, M.; Van Hove, T.; Weber, J.; Anthes, R. Real-time water vapor sensing with suominet—Today and tomorrow. In Proceedings of the International GPS Meteorology Workshop, Tsukuba, Japan, 14–17 January 2003. [Google Scholar]
- Mears, C.A.; Wang, J.; Smith, D.; Wentz, F.J. Intercomparison of total precipitable water measurements made by satellite-borne microwave radiometers and ground-based gps instruments. J. Geophys. Res. Atmos. 2015, 120, 2492–2504. [Google Scholar] [CrossRef]
- Rocken, C.; Hove, T.V.; Johnson, J.; Solheim, F.; Ware, R.; Bevis, M.; Chiswell, S.; Businger, S. Gps/storm—gps sensing of atmospheric water vapor for meteorology. J. Atmos. Ocean. Technol. 1995, 12, 468–478. [Google Scholar] [CrossRef]
- Rocken, C.; Ware, R.; Van Hove, T.; Solheim, F.; Alber, C.; Johnson, J.; Bevis, M.; Businger, S. Sensing atmospheric water vapor with the global positioning system. Geophys. Res. Lett. 1993, 20, 2631–2634. [Google Scholar] [CrossRef]
- Boukabara, S.; Weng, F.; Ferraro, R.; Zhao, L.; Liu, Q.; Yan, B.; Li, A.; Chen, W.; Sun, N.; Meng, H. In Introducing noaa’s microwave integrated retrieval system (mirs). In Proceedings of the 15th International TOVS Study Conference (ITSC-15), Maratea, Italy, 4–10 October 2006. [Google Scholar]
- Boukabara, S.-A.; Garrett, K.; Chen, W.; Iturbide-Sanchez, F.; Grassotti, C.; Kongoli, C.; Chen, R.; Liu, Q.; Yan, B.; Weng, F. Mirs: An all-weather 1dvar satellite data assimilation and retrieval system. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3249–3272. [Google Scholar] [CrossRef]
- Muth, C.; Lee, P.S.; Shiue, J.C.; Webb, W.A. Advanced technology microwave sounder on npoess and npp. In Proceedings of the Geoscience and Remote Sensing Symposium (IGARSS’04), Anchorage, AK, USA, 20–24 September 2004; pp. 2454–2458. [Google Scholar]
- Cao, C.; Xiong, J.; Blonski, S.; Liu, Q.; Uprety, S.; Shao, X.; Bai, Y.; Weng, F. Suomi npp viirs sensor data record verification, validation, and long-term performance monitoring. J. Geophys. Res. Atmos. 2013, 118, 11664–11678. [Google Scholar] [CrossRef]
- Kopp, T.J.; Thomas, W.; Heidinger, A.K.; Botambekov, D.; Frey, R.A.; Hutchison, K.D.; Iisager, B.D.; Brueske, K.; Reed, B. The viirs cloud mask: Progress in the first year of s-npp toward a common cloud detection scheme. J. Geophys. Res. Atmos. 2014, 119, 2441–2456. [Google Scholar] [CrossRef]
- Borbas, E.; Seemann, S.W.; Huang, H.-L.; Li, J.; Menzel, W.P. Global profile training database for satellite regression retrievals with estimates of skin temperature and emissivity. In Proceedings of the 14th International ATOVS Study Conference, Beijing, China, 25–31 May 2005; pp. 763–770. [Google Scholar]
- Baldridge, A.; Hook, S.; Grove, C.; Rivera, G. The aster spectral library version 2.0. Remote Sens. Environ. 2009, 113, 711–715. [Google Scholar] [CrossRef]
- Hoeting, J.A.; Madigan, D.; Raftery, A.E.; Volinsky, C.T. Bayesian model averaging: A tutorial. Stat. Sci. 1999, 14, 382–401. [Google Scholar]
- Raftery, A.E.; Gneiting, T.; Balabdaoui, F.; Polakowski, M. Using bayesian model averaging to calibrate forecast ensembles. Mon. Weather Rev. 2005, 133, 1155–1174. [Google Scholar] [CrossRef]
- Claeskens, G.; Hjort, N.L. Model Selection and Model Averaging; Cambridge University Press: Cambridge, UK, 2008. [Google Scholar]
- Fisher, R.A. On the mathematical foundations of theoretical statistics. Philos. Trans. R. Soc. Lond. A 1922, 222, 309–368. [Google Scholar] [CrossRef]
- Moon, T.K. The expectation-maximization algorithm. IEEE Signal Process. Mag. 1996, 13, 47–60. [Google Scholar] [CrossRef]
- Wang, W.; Liang, S.; Meyers, T. Validating modis land surface temperature products using long-term nighttime ground measurements. Remote Sens. Environ. 2008, 112, 623–635. [Google Scholar] [CrossRef]
- Frey, R.; Heidinger, A.; Hutchison, K.; Botambekov, D.; Dutcher, S. Viirs cloud mask validation exercises. Polar 2011, 82, 84–89. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| View Angle | Expression for TPW | R2 | RMSE (g/cm2) |
|---|---|---|---|
| 0° | w = −43.383x3 + 96.438x2 − 85.266x + 32.297 | 0.983 | 0.191 |
| 15° | w = −42.366x3 + 93.886x2 − 82.8x + 31.365 | 0.983 | 0.192 |
| 30° | w = −39.201x3 + 85.956x2 − 75.185x + 28.512 | 0.982 | 0.195 |
| 45° | w = −33.231x3 + 71.142x2 − 61.309x + 23.475 | 0.981 | 0.201 |
| 60° | w = −23.846x3 + 48.527x2 − 40.888x + 16.288 | 0.979 | 0.209 |
| 75° | w = −12.322x3 + 22.69x2 − 18.262x + 7.9912 | 0.976 | 0.223 |
| TPW Range | Data | MBE (g/cm2) | RMSE (g/cm2) |
|---|---|---|---|
| Total | BMA | 0.023 | 0.332 |
| VIIRS | 0.049 | 0.605 | |
| MIRS | 0.117 | 0.391 | |
| <1.5 g/cm2 | BMA | 0.099 | 0.301 |
| VIIRS | 0.320 | 0.588 | |
| MIRS | 0.212 | 0.371 | |
| [1.5 g/cm2, 3 g/cm2] | BMA | –0.062 | 0.328 |
| VIIRS | –0.177 | 0.445 | |
| MIRS | 0.024 | 0.372 | |
| >3 g/cm2 | BMA | –0.142 | 0.457 |
| VIIRS | –0.702 | 0.921 | |
| MIRS | –0.114 | 0.511 |
| TPW Range | Data | MBE (g/cm2) | RMSE (g/cm2) |
|---|---|---|---|
| Total | BMA | 0.074 | 0.356 |
| VIIRS | 0.354 | 0.826 | |
| MIRS | 0.098 | 0.363 | |
| <1.5 g/cm2 | BMA | 0.131 | 0.309 |
| VIIRS | 0.250 | 0.808 | |
| MIRS | 0.144 | 0.327 | |
| [1.5 g/cm2, 3 g/cm2] | BMA | 0.013 | 0.356 |
| VIIRS | 0.142 | 0.628 | |
| MIRS | 0.016 | 0.365 | |
| >3 g/cm2 | BMA | –0.355 | 0.568 |
| VIIRS | –0.710 | 1.320 | |
| MIRS | –0.351 | 0.530 |
| Cases | LST Standard Deviation (K) | Emissivity Standard Deviation | Pixel Selection Criteria | MBE | RMSE |
|---|---|---|---|---|---|
| 1 | 2.5 | 0.02 | –0.06 | 0.07 | |
| 2 | 2.5 | 0.02 | -- | 0.01 | 0.02 |
| 3 | 1 | 0.02 | Same as case 1 | –0.11 | 0.13 |
| 4 | 1 | 0.02 | -- | 0.07 | 0.12 |
| 5 | 2.5 | 0.01 | Same as case 1 | –0.02 | 0.03 |
| 6 | 2.5 | 0.01 | -- | –0.01 | 0.02 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, S.; Cheng, J. A Framework for Estimating Clear-Sky Atmospheric Total Precipitable Water (TPW) from VIIRS/S-NPP. Remote Sens. 2019, 11, 916. https://doi.org/10.3390/rs11080916
Zhou S, Cheng J. A Framework for Estimating Clear-Sky Atmospheric Total Precipitable Water (TPW) from VIIRS/S-NPP. Remote Sensing. 2019; 11(8):916. https://doi.org/10.3390/rs11080916
Chicago/Turabian StyleZhou, Shugui, and Jie Cheng. 2019. "A Framework for Estimating Clear-Sky Atmospheric Total Precipitable Water (TPW) from VIIRS/S-NPP" Remote Sensing 11, no. 8: 916. https://doi.org/10.3390/rs11080916
APA StyleZhou, S., & Cheng, J. (2019). A Framework for Estimating Clear-Sky Atmospheric Total Precipitable Water (TPW) from VIIRS/S-NPP. Remote Sensing, 11(8), 916. https://doi.org/10.3390/rs11080916