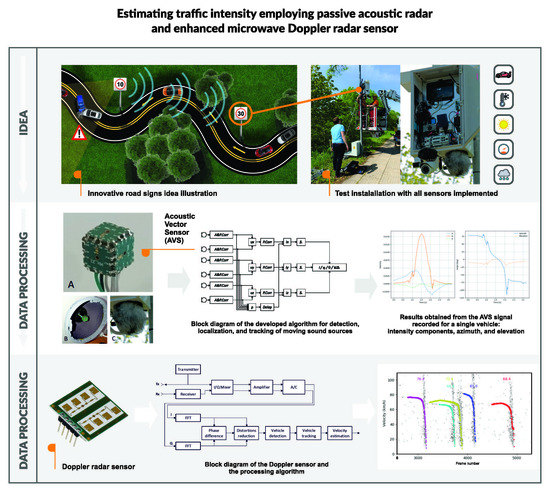
Estimating Traffic Intensity Employing Passive Acoustic Radar and Enhanced Microwave Doppler Radar Sensor



Abstract
:
1. Introduction
2. Materials and Methods
2.1. Vehicle Counting and Speed Measurement with Doppler Sensor
2.1.1. Doppler Sensor
2.1.2. Algorithm for Processing of Doppler Sensor Signals
2.1.3. Suppression of Interference and Noise
- signal components reflected from objects approaching the sensor or moving away from it have Δϕ following a normal distribution with mean equal to 90° or −90°, respectively;
- for the noise, Δϕ has a normal distribution with the mean value close to 0° and it might overlap the signal parts, depending on the sensor class; and,
- EMI is concentrated around Δϕ = 0°, as it influences both I/Q channels in an identical way.
2.1.4. Vehicle Detection, Tracking, and Velocity Estimation
2.2. Vehicle Counting and Speed Measurement with Acoustic Vector Sensor
2.2.1. Acoustic Vector Sensor
2.2.2. Intensity Computation
3. Results
3.1. Test Setup
3.2. Analysis of Vehicle Counting
3.3. Analysis of Velocity Measurement Using Doppler Sensor
3.4. Analysis of Velocity Measurement Using Acoustic Vector Sensor
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Farmer, C.M.; Lund, A.K.; Trempel, R.E.; Braver, E.R. Fatal crashes of passenger vehicles before and after adding antilock braking systems. Accid. Anal. Prev. 1997, 29, 745–757. [Google Scholar] [CrossRef]
- Ershadi, N.Y.; Menéndez, J.M.; Jiménez, D. Robust vehicle detection in different weather conditions: Using MIPM. PLoS ONE 2018, 13, e0191355. [Google Scholar] [CrossRef] [Green Version]
- Czyżewski, A.; Sroczyński, A.; Śmiałkowski, T.; Hoffmann, P. Development of Intelligent Road Signs with V2X Interface for Adaptive Traffic Controlling. In Proceedings of the 6th International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Kraków, Poland, 5–7 June 2019. [Google Scholar] [CrossRef]
- Czyżewski, A.; Cygert, S.; Szwoch, G.; Kotus, J.; Weber, D.; Szczodrak, M.; Koszewski, D.; Jamroz, K.; Kustra, W.; Sroczyński, A.; et al. Comparative study on the effectiveness of various types of road traffic intensity detectors. In Proceedings of the 6th International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Kraków, Poland, 5–7 June 2019. [Google Scholar] [CrossRef]
- Sun, Y.; Xu, H.; Wu, J.; Zheng, J.; Dietrich, K.M. 3-D data processing to extract vehicle trajectories from roadside LiDAR data. Transp. Res. Rec. J. Transp. Res. Board 2018, 2672, 14–22. [Google Scholar] [CrossRef]
- Tsubota, T.; Yoshii, T. An analysis of the detection probability of MAC address from a moving Bluetooth device. Transp. Res. Procedia 2017, 21, 251–256. [Google Scholar] [CrossRef]
- Gupta, S.; Hamzin, A.; Degbelo, A. A Low-cost open hardware system for collecting traffic data using Wi-Fi signal strength. Sensors 2018, 18, 3623. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Balid, W.; Tafish, H.; Refai, H. Intelligent vehicle counting and classification sensor for real-time traffic surveillance. IEEE Trans. Intell. Transp. Syst. 2017, 19, 1–11. [Google Scholar] [CrossRef]
- Xuan, Y.; Meng, H.; Wang, X.; Zhang, H. A high-range-resolution microwave radar system for traffic flow rate measurement. In Proceedings of the 2005 IEEE Intelligent Transportation Systems, Vienna, Austria, 16 September 2005. [Google Scholar] [CrossRef]
- Fang, J.; Meng, H.; Zhang, H.; Wang, X. A low-cost vehicle detection and classification system based on unmodulated continuous-wave radar. In Proceedings of the IEEE Intelligent Transportation Systems Conference, Seattle, WA, USA, 30 September–3 October 2007; pp. 715–720. [Google Scholar] [CrossRef]
- Zhang, X.; Huang, J.C.; Song, E.L.; Liu, H.W.; Li, B.Q.; Yuan, X.B. Design of small MEMS microphone array systems for direction finding of outdoors moving vehicles. Sensors 2014, 14, 4384–4398. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Na, Y.; Guo, Y.; Fu, Q.; Yan, Y. An acoustic traffic monitoring system: Design and implementation. In Proceedings of the 2015 IEEE 12th Intl Conf on Ubiquitous Intelligence and Computing and 2015 IEEE 12th Intl Conf on Autonomic and Trusted Computing and 2015 IEEE 15th Intl Conf on Scalable Computing and Communications and Its Associated Workshops (UIC-ATC-ScalCom), Beijing, China, 10–14 August 2015. [Google Scholar] [CrossRef]
- Zu, X.; Zhang, S.; Guo, F.; Zhao, Q.; Zhang, X.; You, X.; Liu, H.; Li, B.; Yuan, X. Vehicle counting and moving direction identification based on small-aperture microphone array. Sensors 2017, 17, 1089. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Marciniuk, K.; Kostek, B.; Czyżewski, A. Traffic noise analysis applied to automatic vehicle counting and classification. Multimedia Communications. Serv. Secur. MCSS 2017, 110–123. [Google Scholar] [CrossRef]
- Marciniuk, K.; Kostek, B.; Czyżewski, A. Classifying type of vehicles on the basis of data extracted from audio signal characteristics. J. Acoust. Soc. Am. 2017, 141, 3883. [Google Scholar] [CrossRef]
- Marciniuk, K. Acoustic Road Traffic Monitoring Using Noise Information and Machine Learning. Ph.D. Thesis, Gdańsk University of Technology, Gdansk, Poland, 2019. (In Polish). [Google Scholar]
- Richards, M.A. Fundamentals of Radar Signal Processing, 2nd ed.; McGraw-Hill Education: New York, NY, USA, 2014. [Google Scholar]
- Brooker, G. Doppler measurement. In Sensors and Signals; Australian Centre for Field Robotics, University of Sydney: Sydney, Australia, 2006. [Google Scholar]
- Sawicki, D.S. The cosine effect. In Police Radar Handbook: A Comprehensive Guide to Speed Measuring Systems; CreateSpace Independent Publishing Platform: Scotts Valley, CA, USA, 2013. [Google Scholar]
- Szwoch, G. Suppression of distortions in signals received from Doppler sensor for vehicle speed measurement. In Proceedings of the IEEE Signal Processing: Algorithms, Architectures, Arrangements, and Applications (SPA), Poznań, Poland, 19–21 September 2018. [Google Scholar] [CrossRef]
- Kotus, J.; Szwoch, G. Calibration of acoustic vector sensor based on MEMS microphones for DOA estimation. Appl. Acoust. 2018, 141, 307–321. [Google Scholar] [CrossRef]
- Jacobsen, F. Sound intensity and its measurements and applications. Curr. Top. Acoust. Res. 2003, 3, 87–91. [Google Scholar]
- Fahy, F. Sound Intensity, 2nd ed.; E & FN Spon: London, UK, 1995. [Google Scholar]
- Savitzky, A.; Golay, M.J.E. Smoothing and differentiation of data by simplified least squares procedures. Anal. Chem. 1964, 36, 1627–1639. [Google Scholar] [CrossRef]
- B+B Sensors. RSM2650 Radar Movement Alarm Unit—Data Sheet. Available online: http://www.produktinfo.conrad.com/datenblaetter/500000-524999/506343-da-01-en-RADARBEWEGUNGSM__MOD__STEREO_4_75__5_25V.pdf (accessed on 15 September 2019).
- IvenSense. INMP441. Available online: https://www.invensense.com/products/digital/inmp441/ (accessed on 15 September 2019).






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Doppler | AVS |
|---|---|---|
| Analyzed time | 24 h | 23 h 30 min |
| Total number of vehicles | 2998 | 2953 |
| True detections | 2742 | 2583 |
| False negatives | 256 | 370 |
| False positives | 44 | 189 |
| Recall | 91.46% | 87.47% |
| Precision | 98.42% | 93.18% |
| Accuracy | 90.14% | 82.21% |
| Lane | Closer Lane | Further Lane | Both Lanes |
|---|---|---|---|
| Number of vehicles | 2953 | 2940 | 5893 |
| Detected, correct lane | 2583 | 2691 | 5274 |
| Detected, wrong lane | 191 | 80 | 271 |
| Not detected | 179 | 169 | 348 |
| False detections | 109 | 190 | 299 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Czyżewski, A.; Kotus, J.; Szwoch, G. Estimating Traffic Intensity Employing Passive Acoustic Radar and Enhanced Microwave Doppler Radar Sensor. Remote Sens. 2020, 12, 110. https://doi.org/10.3390/rs12010110
Czyżewski A, Kotus J, Szwoch G. Estimating Traffic Intensity Employing Passive Acoustic Radar and Enhanced Microwave Doppler Radar Sensor. Remote Sensing. 2020; 12(1):110. https://doi.org/10.3390/rs12010110
Chicago/Turabian StyleCzyżewski, Andrzej, Józef Kotus, and Grzegorz Szwoch. 2020. "Estimating Traffic Intensity Employing Passive Acoustic Radar and Enhanced Microwave Doppler Radar Sensor" Remote Sensing 12, no. 1: 110. https://doi.org/10.3390/rs12010110
APA StyleCzyżewski, A., Kotus, J., & Szwoch, G. (2020). Estimating Traffic Intensity Employing Passive Acoustic Radar and Enhanced Microwave Doppler Radar Sensor. Remote Sensing, 12(1), 110. https://doi.org/10.3390/rs12010110