ISAR Image Matching and Three-Dimensional Scattering Imaging Based on Extracted Dominant Scatterers





Abstract
:1. Introduction
2. Signal Model
3. Theory and Method
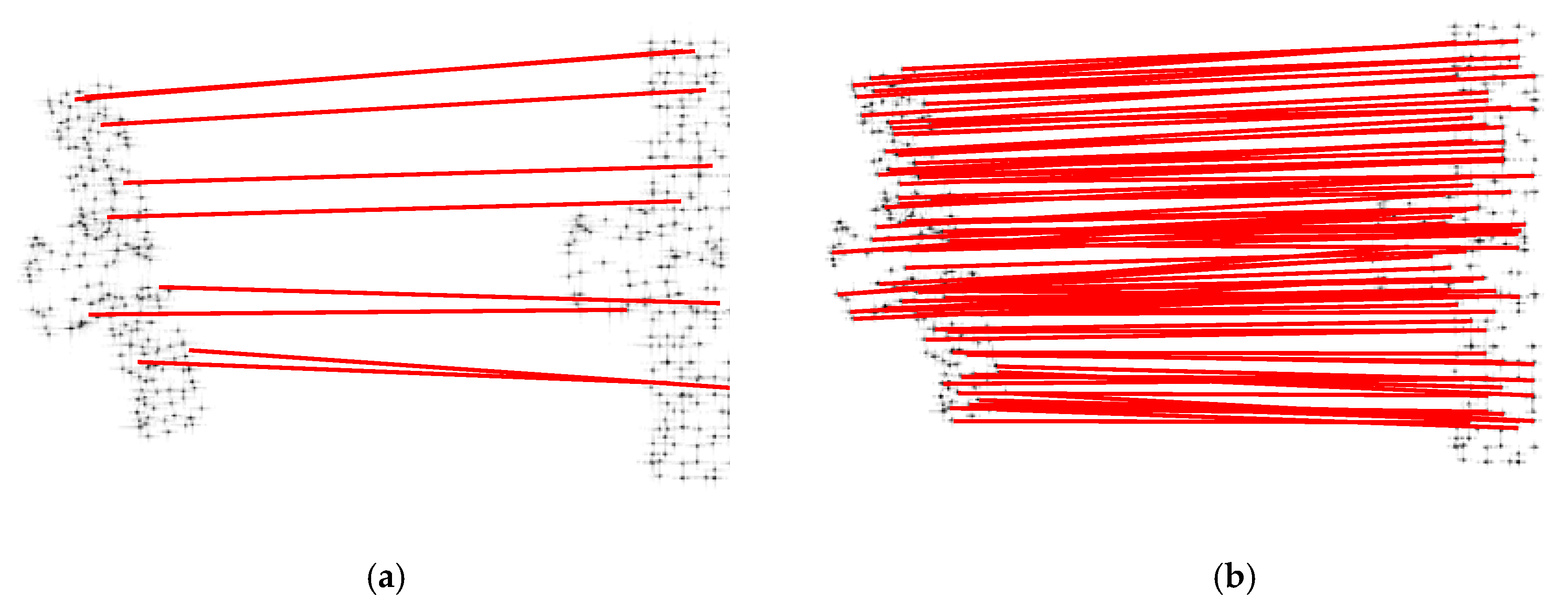
3.1. Scattering Point Sets Matching based on RANSAC and Affine Transformation
3.2. Estimation of ARX and ARY
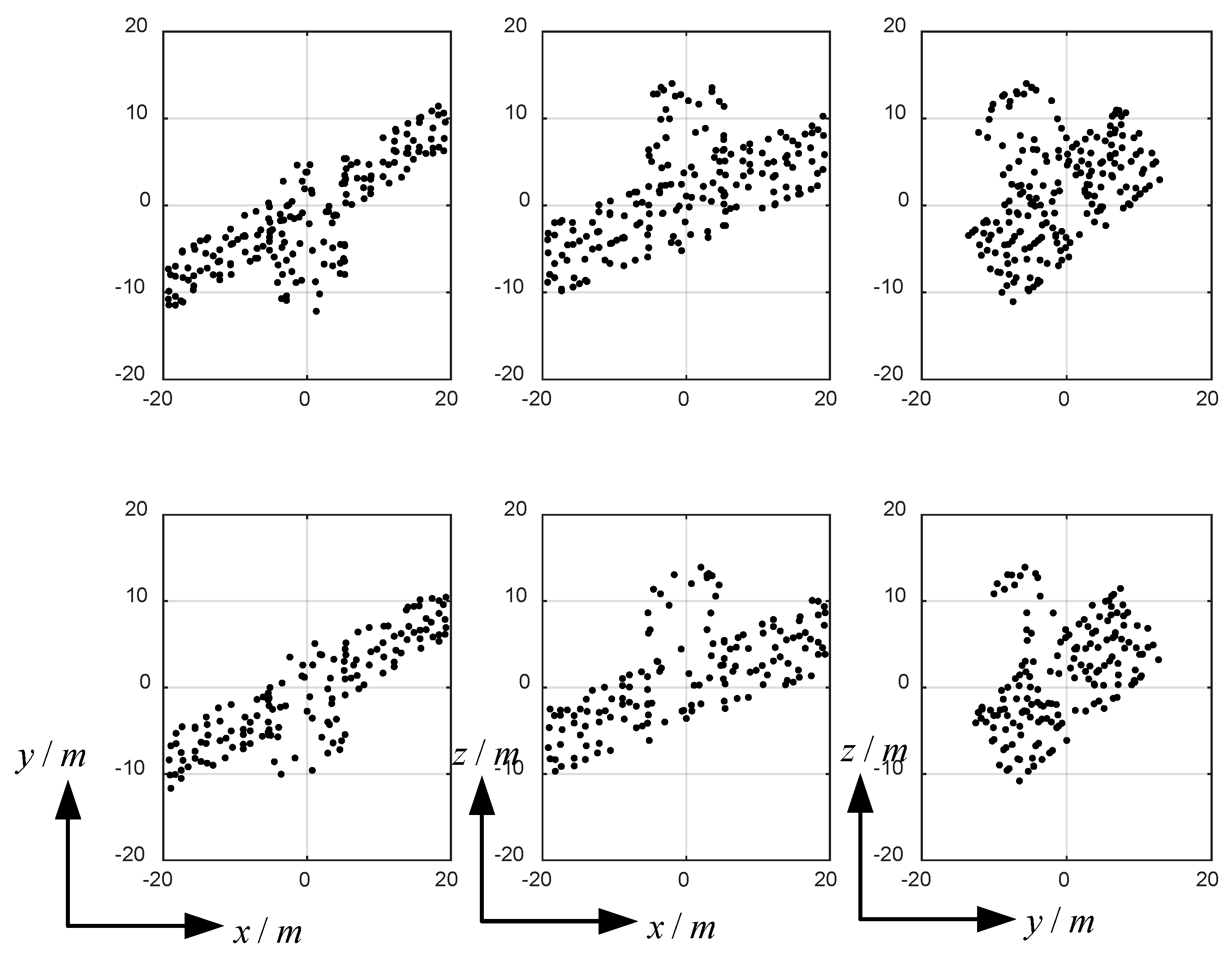
3.3. Estimation of Scatterer Height and Affine Transformation Considering Scatterer Height
4. Simulations
4.1. Experiment on Point Scattering Simulation Data
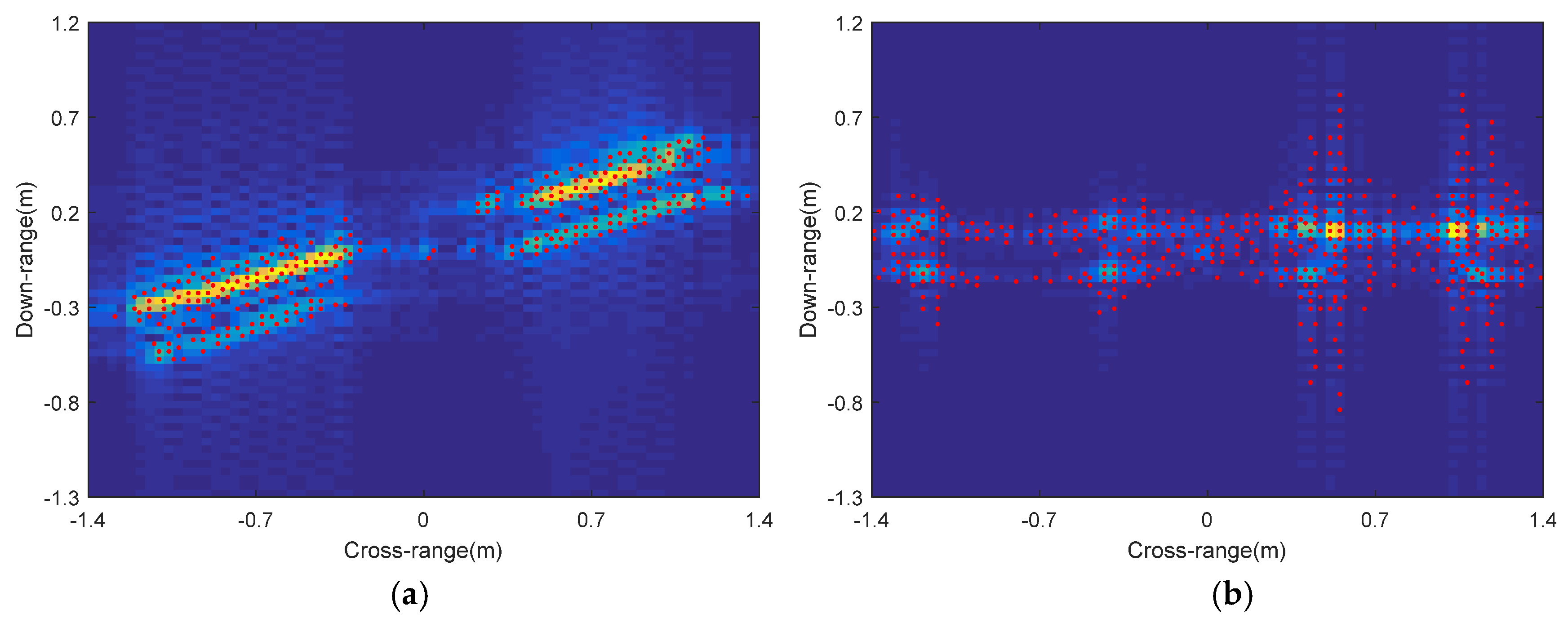
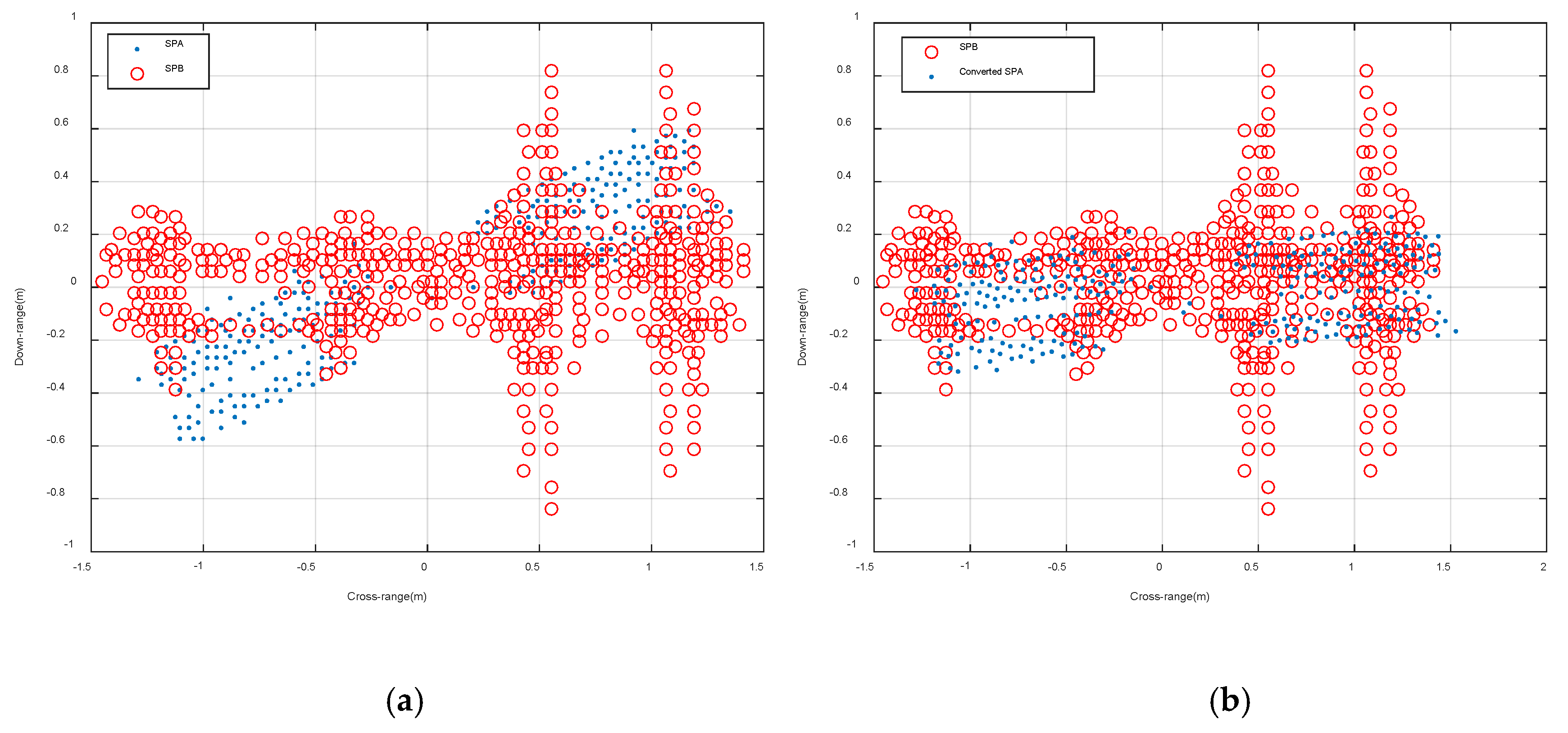
4.2. Simulation based on CADFEKO Software
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chen, C.-C.; Andrews, H.C. Target-motion-induced radar imaging. IEEE Trans. Aerosp. Electron. Syst. 1980, 16, 2–14. [Google Scholar] [CrossRef]
- Zhang, Q.; Yeo, T.S.; Du, G. ISAR imaging in strong ground clutter using a new stepped-frequency signal format. IEEE Trans. Geosci. Remote Sens. 2003, 41, 948–952. [Google Scholar] [CrossRef]
- Bao, Z.; Xing, M.D.; Wang, T. Radar Imaging Technique; Publishing House of Electronic Industry: Beijing, China, 2005. [Google Scholar]
- Wang, Q.; Xing, M.; Lu, G.; Bao, Z. Single range matching filtering for space debris radar imaging. IEEE Geosci. Remote Sens. Lett. 2007, 4, 576–580. [Google Scholar] [CrossRef]
- Chen, L.; Liang, B.; Yang, D. Two-Step Accuracy Improvement of Motion Compensation for Airborne SAR with Ultrahigh Resolution and Wide Swath. IEEE Trans. Geosci. Remote Sens. 2019, 57, 7148–7160. [Google Scholar] [CrossRef]
- Wang, D.-W.; Ma, X.-Y.; Chen, A.-L.; Su, Y. High-resolution imaging using a wideband MIMO radar system with two distributed arrays. IEEE Trans. Image Process. 2010, 19, 1280–1289. [Google Scholar] [CrossRef]
- Carlo, N.; Gianfranco, F.; Marco, M. A novel approach for motion compensation in ISAR system. In Proceedings of the EUSAR 2014, 10th European Conference on Synthetic Aperture Radar, Berlin, Germany, 3–5 June 2014; pp. 1–4. [Google Scholar]
- Baselice, F.; Caivano, R.; Cammarota, A.; Pascazio, V.; Ferraioli, G. SAR despeckling based on enhanced winner filter. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 1042–1045. [Google Scholar]
- Xu, G.; Yang, L.; Bi, G.; Xing, M. Enhanced ISAR imaging and motion estimation with parametric and dynamic sparse Bayesian learning. IEEE Trans. Comput. Imaging 2017, 3, 940–952. [Google Scholar] [CrossRef]
- Fu, J.; Xu, D.; Xing, M. A novel ionospheric TEC estimation method based on L-Band ISAR signal processing. In Proceedings of the IGARSS 2019, IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 314–317. [Google Scholar]
- Ferraioli, G.; Pascazio, V.; Schirinzi, G. Ratio-Based NonLocal Anisotropic Despeckling Approach for SAR Images. IEEE Trans. Geosci. Remote Sens. 2019, 57, 7785–7798. [Google Scholar] [CrossRef]
- Wang, J.; Liang, X.; Chen, L.; Wang, L.; Li, K. First Demonstration of joint wireless communication and high-resolution SAR imaging using airborne MIMO radar system. IEEE Trans. Geosci. Remote Sens. 2019, 57, 6619–6632. [Google Scholar] [CrossRef]
- Sheng, J.; Xing, M.; Zheng, L.; Mehmood, M.Q.; Yang, L. ISAR cross-range scaling by using sharpness maximization. IEEE Trans. Geosci. Remote Sens. Lett. 2015, 12, 165–169. [Google Scholar] [CrossRef]
- Gao, Y.; Xing, M.; Zhang, Z.; Guo, L. ISAR imaging and cross-range scaling for maneuvering targets by using the NCS-NLS algorithm. IEEE Sens. J. 2019, 19, 4889–4897. [Google Scholar] [CrossRef]
- Knaell, K.; Cardillo, G. Radar tomography for the generation of three-dimensional images. Proc. Radar Sonar Navig. 1995, 142, 54–60. [Google Scholar] [CrossRef] [Green Version]
- Mayhan, J.; Burrows, M.; Cuomo, K.; Piou, J. High resolution 3D snapshot ISAR imaging and feature extraction. IEEE Trans. Aerosp. Electron. Syst. 2001, 37, 630–642. [Google Scholar] [CrossRef]
- Morita, T.; Kanade, T. A sequential factorization method for recovering shape and motion from image streams. IEEE Trans. Pattern Anal. Mach. Intell. 1997, 19, 858–867. [Google Scholar] [CrossRef]
- McFadden, F.E. Three-dimensional reconstruction from ISAR sequences. Proc. SPIE 2002, 4744, 58–67. [Google Scholar]
- Liu, L.; Zhou, F.; Bai, X.; Tao, M. Joint cross-range scaling and 3D Geometry reconstruction of ISAR targets based on factorization method. IEEE Trans. Image Process. 2016, 25, 1740–1750. [Google Scholar] [CrossRef] [PubMed]
- Wang, F.; Xu, F.; Jin, Y. 3-D information of a space target retrieved from a sequence of high-resolution 2-D ISAR images. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 5000–5002. [Google Scholar]
- Wang, F.; Xu, F.; Jin, Y. Three-dimensional reconstruction from a multiview sequence of sparse ISAR imaging of a space target. IEEE Trans. Geosci. Remote Sens. 2018, 56, 611–620. [Google Scholar] [CrossRef]
- Dan, X.; Xing, M.; Xia, X.-G.; Sun, G.-C.; Fu, J.; Su, T. A multi-Perspective 3D reconstruction method with single perspective instantaneous target attitude estimation. Remote Sens. 2019, 11, 1277. [Google Scholar]
- Gianfranco, F.; Francesco, S.; Francesco, S. Three-Dimensional focusing with multipass SAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 507–517. [Google Scholar]
- Gianfranco, F.; Antonio, P.; Diego, R. A null-space method for the phase unwrapping of multitemporal SAR interferometric stacks. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2323–2334. [Google Scholar]
- Marco, M.; Daniele, S.; Federica, S.; Nicola, B. 3D interferometric ISAR imaging of noncooperative targets. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 3102–3114. [Google Scholar]
- Chen, Q.; Xu, G.; Zhang, L.; Xing, M.; Bao, Z. Three-dimensional interferometric inverse synthetic aperture radar imaging with limited pulses by exploiting joint sparsity. IET Radar Sonar Navig. 2015, 9, 692–701. [Google Scholar] [CrossRef]
- Rong, J.; Wang, Y.; Han, T. Interferometric ISAR imaging of maneuvering targets with arbitrary Three-Antenna configuration. IEEE Trans. Geosci. Remote Sensi. 2020, 58, 1102–1119. [Google Scholar] [CrossRef]
- Zhou, J.; Shi, Z.; Fu, Q. Three-dimensional scattering center extraction based on wide aperture data at a single elevation. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1638–1655. [Google Scholar] [CrossRef]
- Wang, G.; Xia, X.-G.; Chen, V. Three-dimensional ISAR imaging of maneuvering targets using three receivers. IEEE Trans. Image Process. 2001, 10, 436–447. [Google Scholar] [CrossRef] [PubMed]
- Xu, X.; Narayanan, R.M. Three-dimensional interferometric ISAR imaging for target scattering diagnosis and modeling. IEEE Trans. Image Process. 2001, 10, 1094–1102. [Google Scholar] [PubMed]
- Ma, C.; Yeo, T.S.; Zhang, Q.; Tan, H.; Wang, J. Three-dimensional ISAR imaging based on antenna array IEEE Trans. Geosci. Remote Sens. 2008, 46, 504–515. [Google Scholar] [CrossRef]
- Ma, C.; Yeo, T.S.; Tan, C.; Tan, H. Sparse array 3-D ISAR imaging based on maximum likelihood estimation and clean technique. IEEE Trans. Image Process. 2010, 19, 2127–2142. [Google Scholar]
- Xu, G.; Xing, M.; Xia, X.-G.; Zhang, L.; Chen, Q.; Bao, Z. 3D Geometry and motion estimations of maneuvering targets for interferometric ISAR with sparse aperture. IEEE Trans. Image Process. 2016, 25, 2005–2020. [Google Scholar] [CrossRef]
- Tomasi, C.; Kanade, T. Shape and motion from image streams under orthography: A factorization method. Int. J. Comput. Vis. 1992, 9, 137–154. [Google Scholar] [CrossRef]
- Aghababaee, H.; Ferraioli, G.; Schirinzi, G.; Pascazio, V. Regularization of SAR Tomography for 3-D Height Reconstruction in Urban Areas. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2019, 12, 648–659. [Google Scholar] [CrossRef]
- Ma, W.; Wen, Z.; Wu, Y.; Jiao, L.; Gong, M.; Zheng, Y. Remote sensing image registration with modified SIFT and enhanced feature matching. IEEE Geosci. Remote Sens. Lett. 2017, 14, 3–7. [Google Scholar] [CrossRef]
- Duan, J.; Zhang, L.; Xing, M. Polarimetric target decomposition based on attributed scarrering center model for synthetic aperture radar targets. IEEE Geosci. Remote Sens. Lett. 2014, 11, 2095–2099. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | ARX | ARY | Bistatic Angle | Dominant Scatter |
|---|---|---|---|---|
| Setting value | 60.00° | 45° | 20° | 212 |
| Parameters | Setting Value |
|---|---|
| 19.69° | |
| ARX | 80.00° |
| ARY | 91.73° |
| Radar A | 20.00° |
| Radar B | 0.00° |
| Parameters | Setting Value | Estimation Error | Estimation Error |
|---|---|---|---|
| ARX | 80.00° | 75.67° | 4.33° |
| ARY | 91.73° | 94.38° | 2.65° |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, D.; Bie, B.; Sun, G.-C.; Xing, M.; Pascazio, V. ISAR Image Matching and Three-Dimensional Scattering Imaging Based on Extracted Dominant Scatterers. Remote Sens. 2020, 12, 2699. https://doi.org/10.3390/rs12172699
Xu D, Bie B, Sun G-C, Xing M, Pascazio V. ISAR Image Matching and Three-Dimensional Scattering Imaging Based on Extracted Dominant Scatterers. Remote Sensing. 2020; 12(17):2699. https://doi.org/10.3390/rs12172699
Chicago/Turabian StyleXu, Dan, Bowen Bie, Guang-Cai Sun, Mengdao Xing, and Vito Pascazio. 2020. "ISAR Image Matching and Three-Dimensional Scattering Imaging Based on Extracted Dominant Scatterers" Remote Sensing 12, no. 17: 2699. https://doi.org/10.3390/rs12172699
APA StyleXu, D., Bie, B., Sun, G. -C., Xing, M., & Pascazio, V. (2020). ISAR Image Matching and Three-Dimensional Scattering Imaging Based on Extracted Dominant Scatterers. Remote Sensing, 12(17), 2699. https://doi.org/10.3390/rs12172699